
The Future of Agricultural Jobs in View of Robotization

 ,
,  ,
,  ,
,  ,
, 

Abstract
:1. Introduction
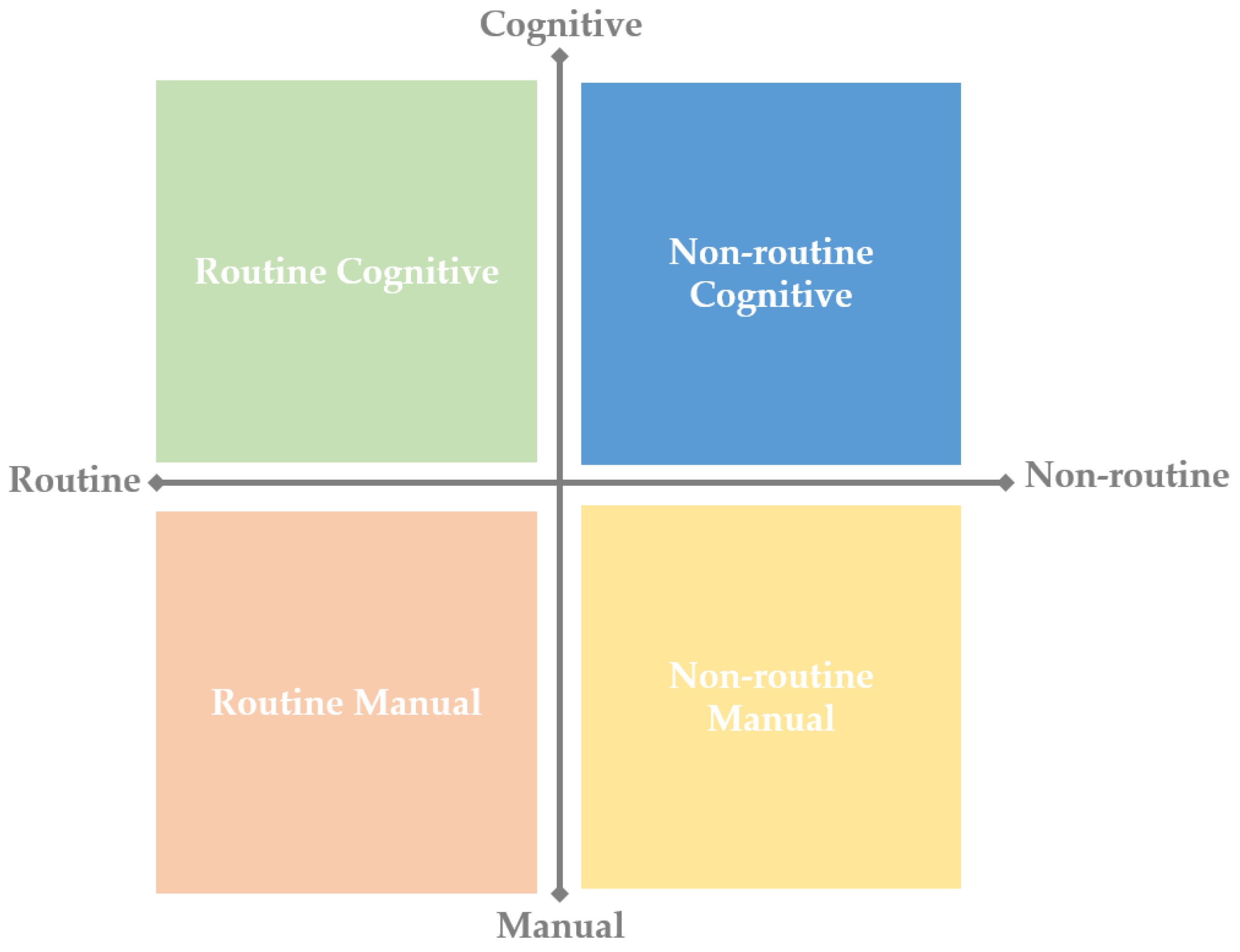
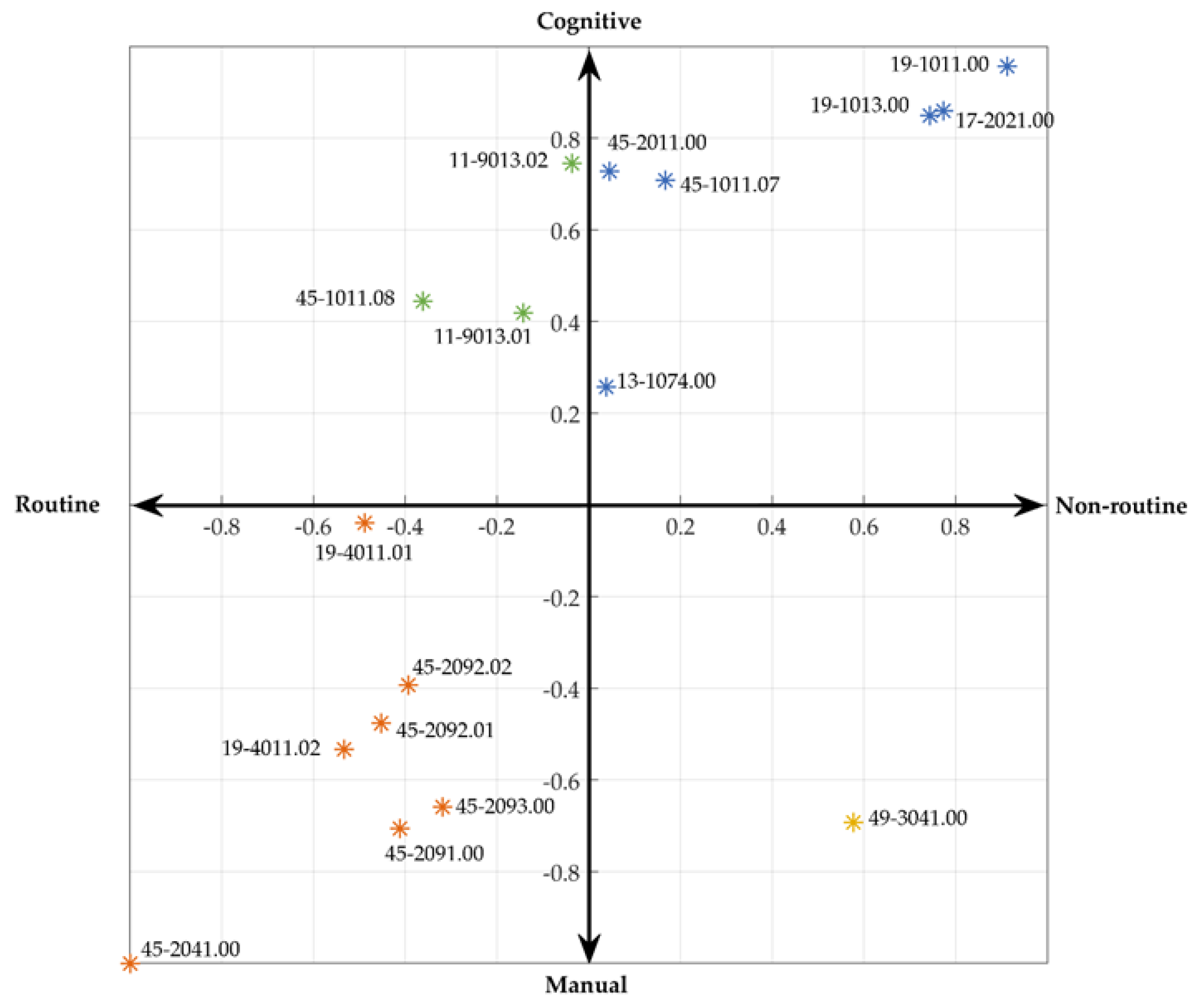
- To map agricultural occupations in terms of their cognitive/manual and routine/non-routine nature and
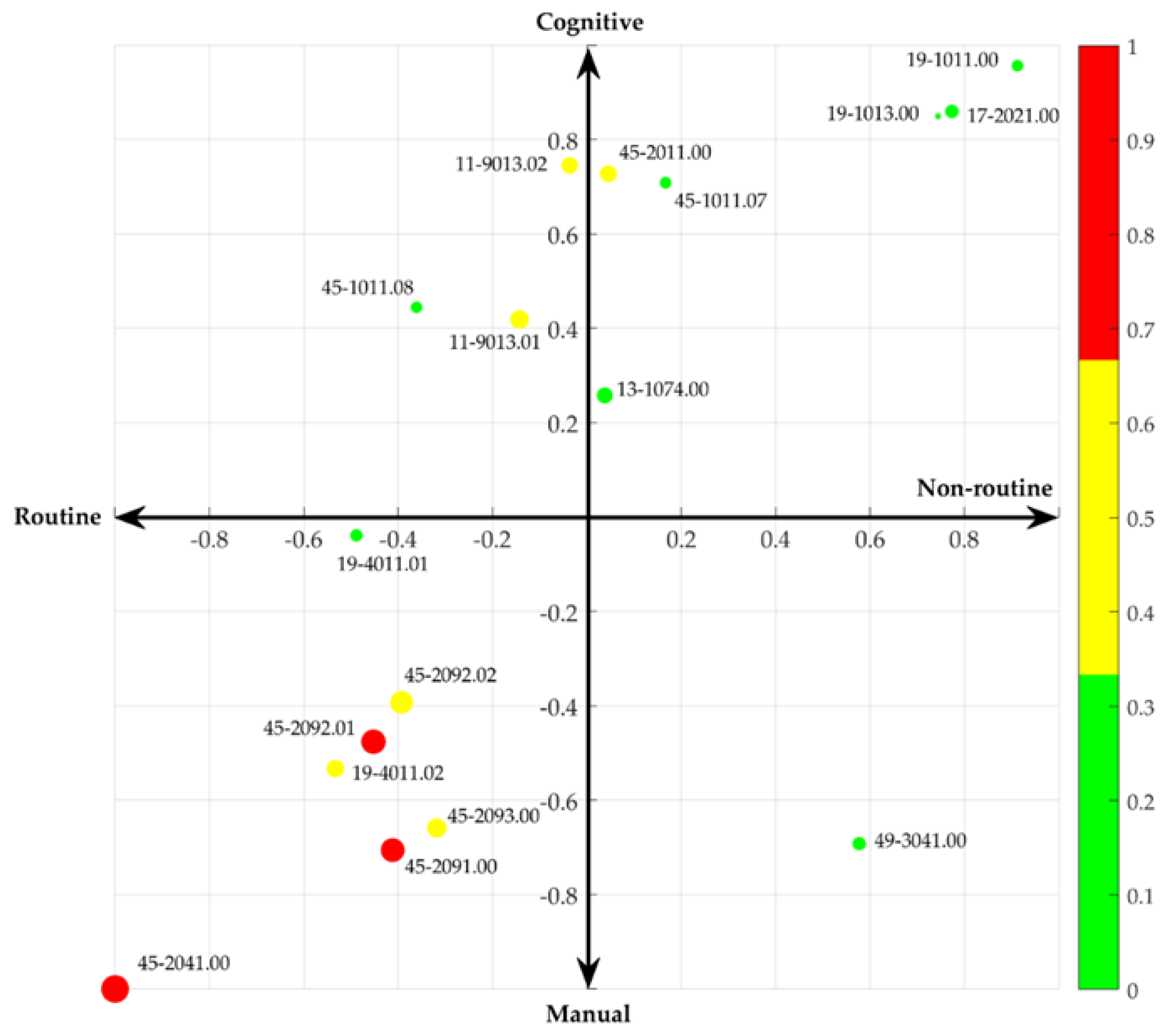
- To assess the susceptibility of agricultural occupations to the adoption of robotization.
2. Materials and Methods
2.1. Classification of Agricultural Occupations
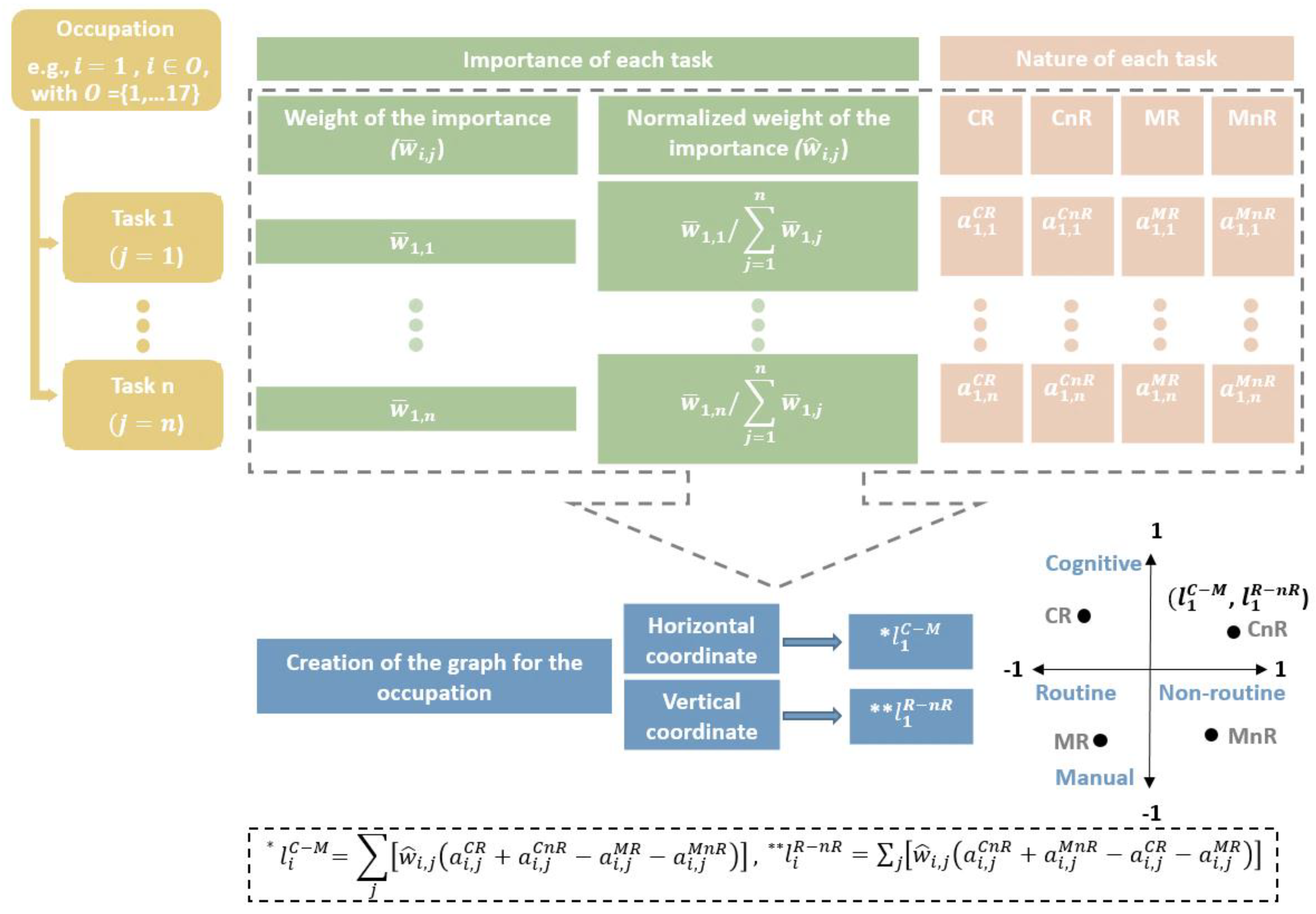
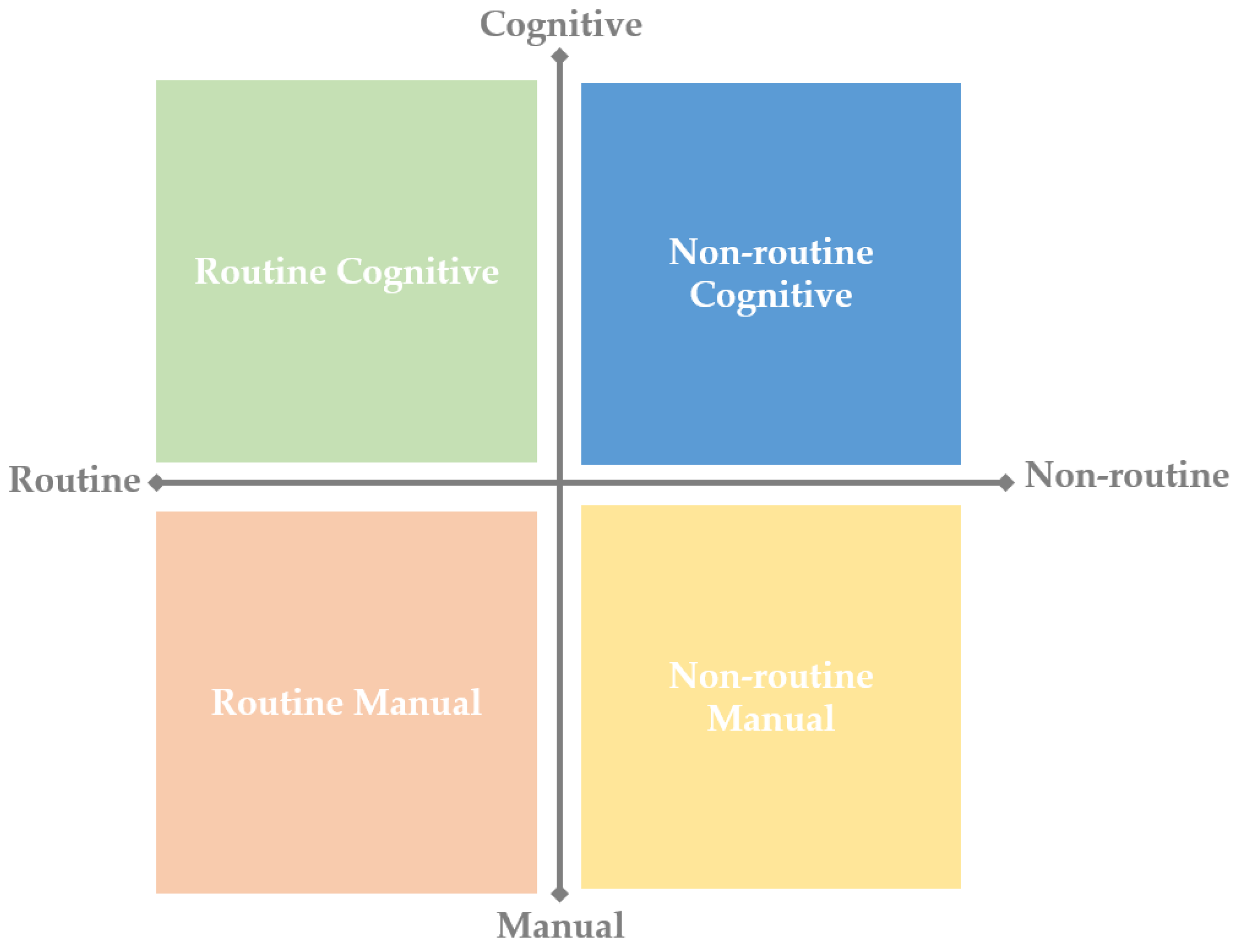
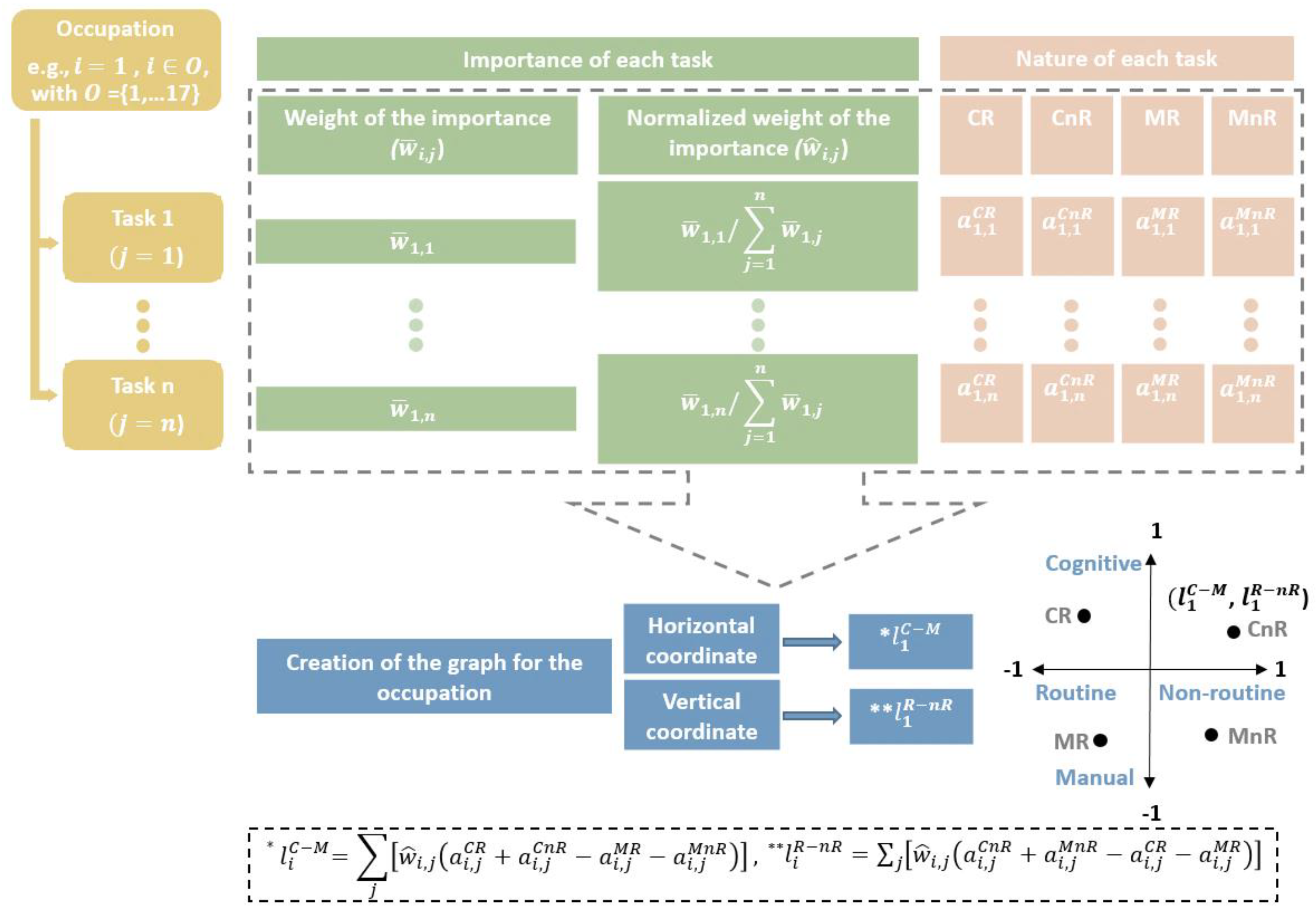
2.2. Occupation Type Mapping
- Not important: Score 1
- Slightly important: Score 2
- Important: Score 3
- Very important: Score 4
- Strongly important: Score 5
2.3. Occupation Susceptibility to Robotization
- Score 0: There is not a technology at TRL3 or higher demonstrated, or there is not any reasonable indication that the particular task can be computerized-robotized in the short- or mid-term future.
- Score 0.5: Significant part (or parts) of the task can be computerized-robotized (e.g., computer-supported tasks and navigation-adding technologies).
- Score 1: There is an existing technology or a technology under development at least at TRL3 that can be implemented for the execution of the task.
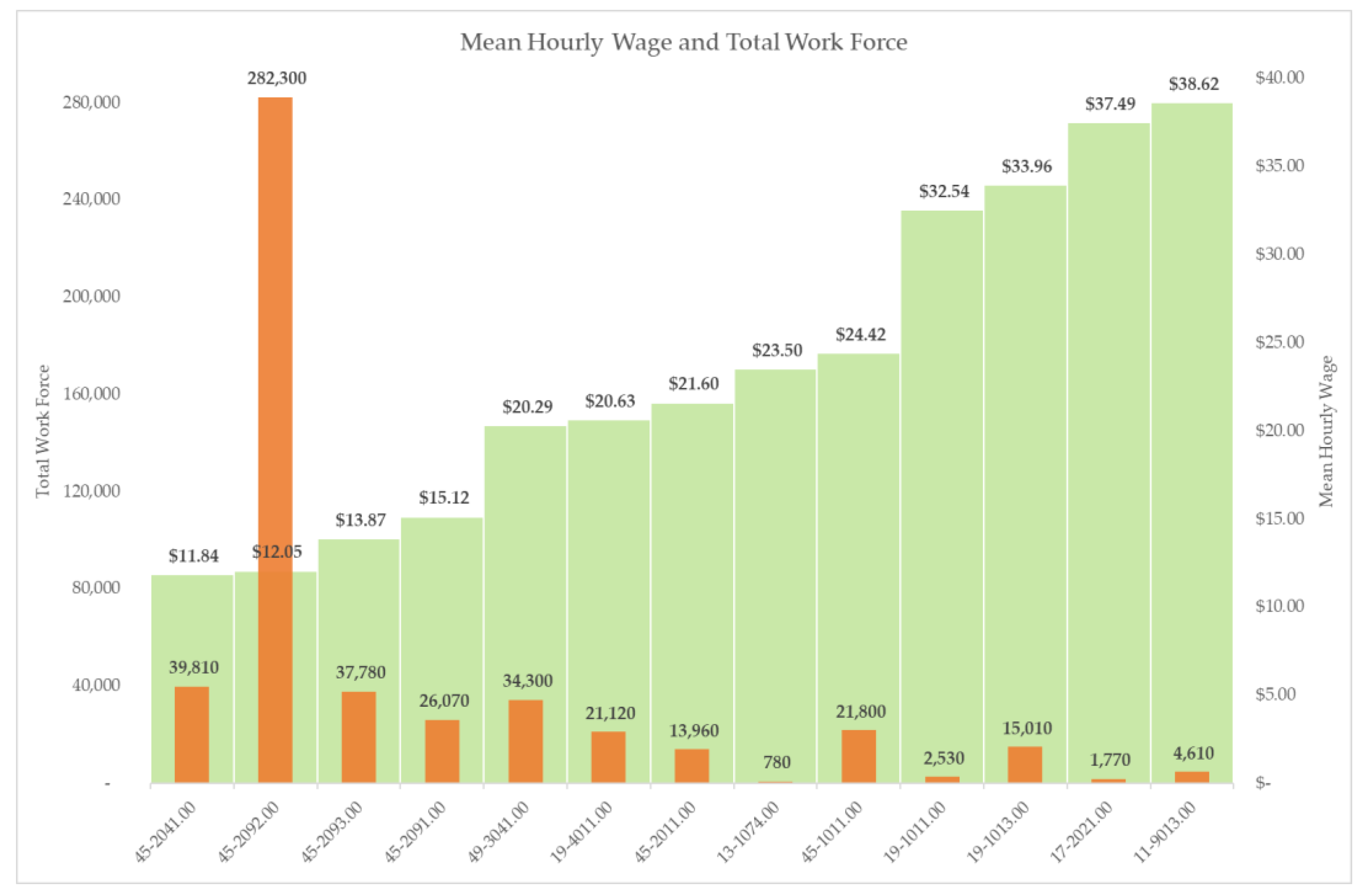
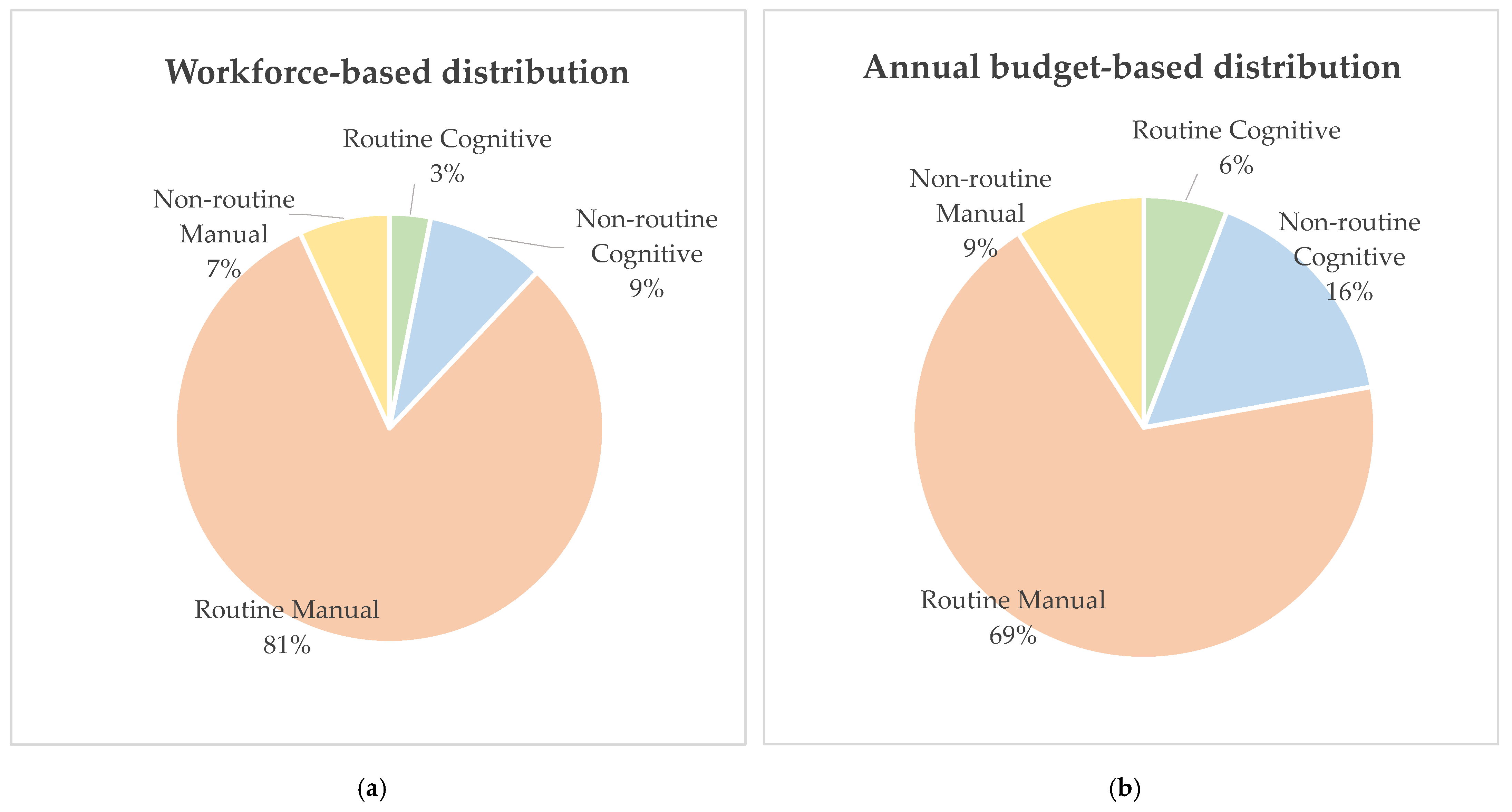
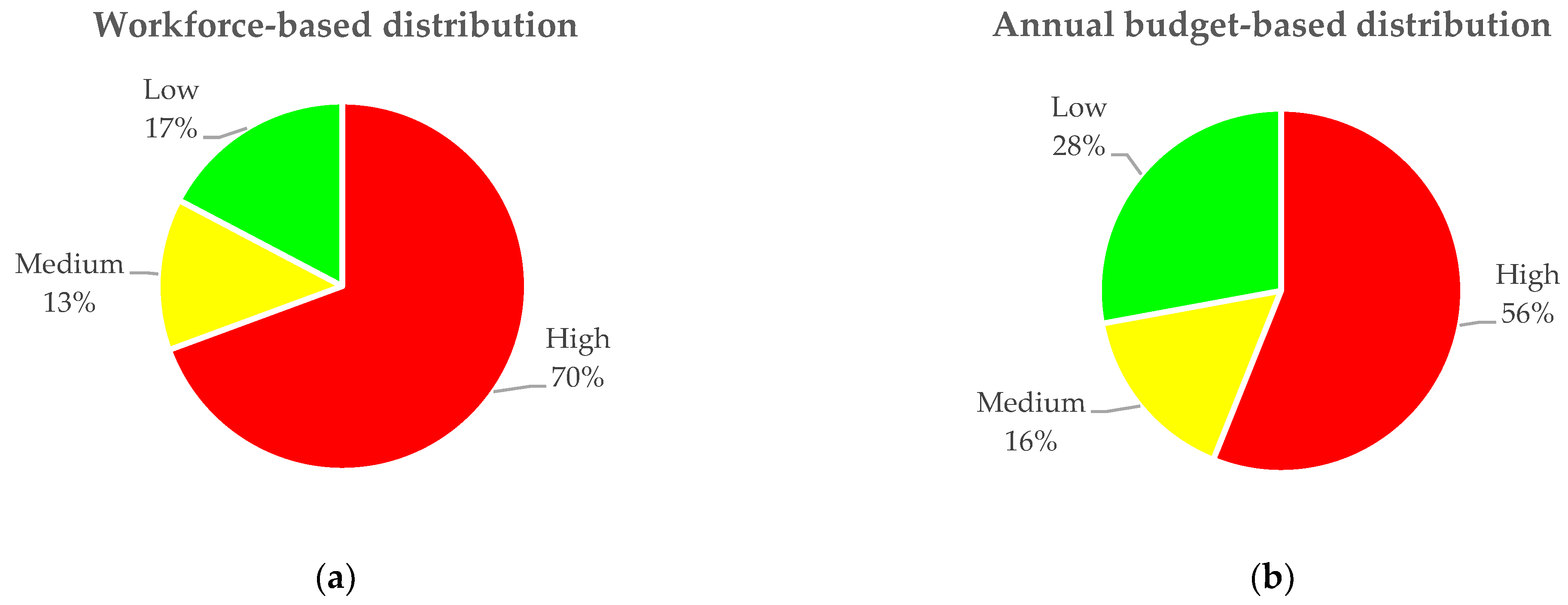
2.4. Consideration of Workforce and Wages in Agricultural Occupations
3. Results and Discussion
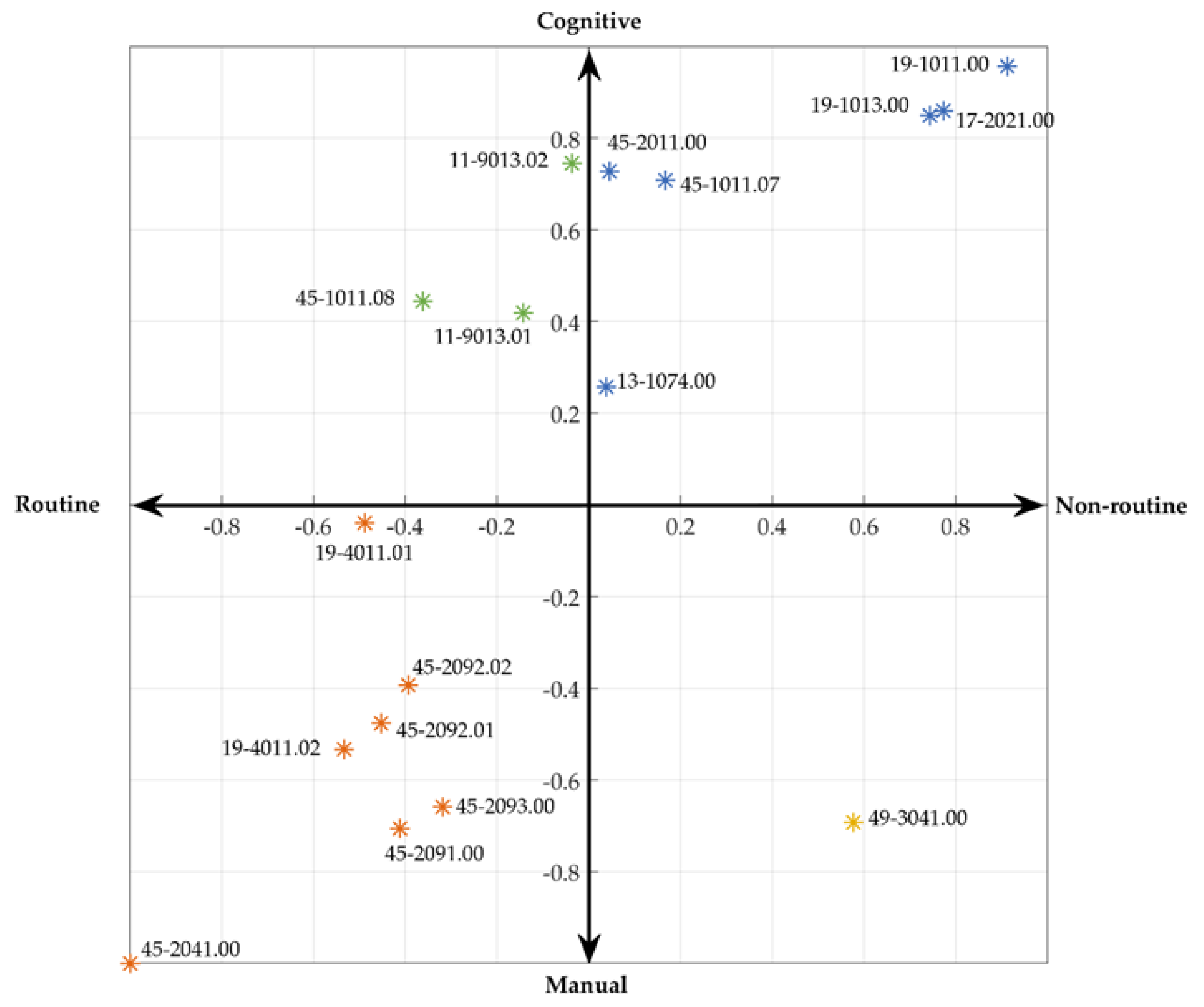
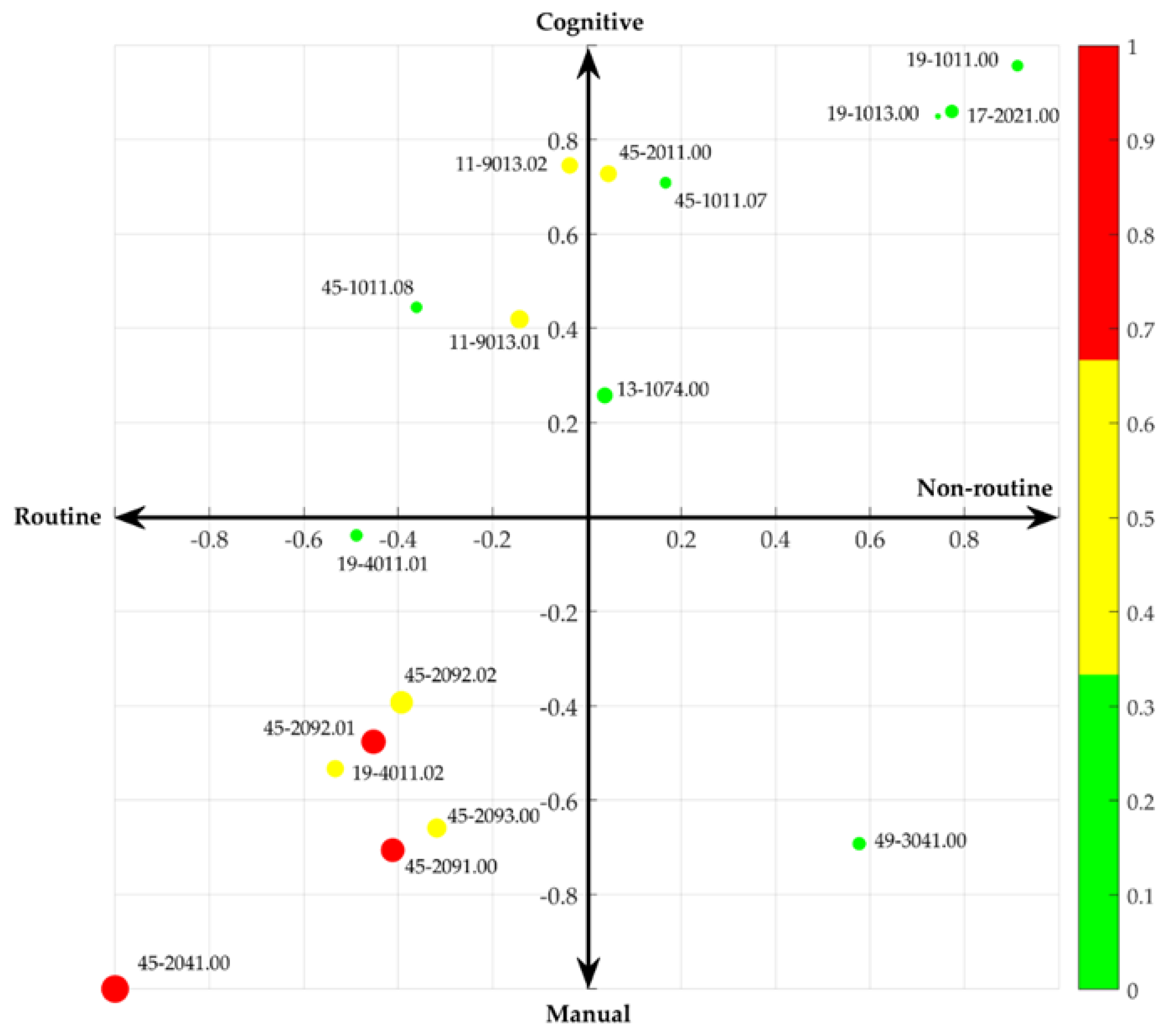
3.1. Occupation Mapping
3.2. Rating Susceptibility to Robotization
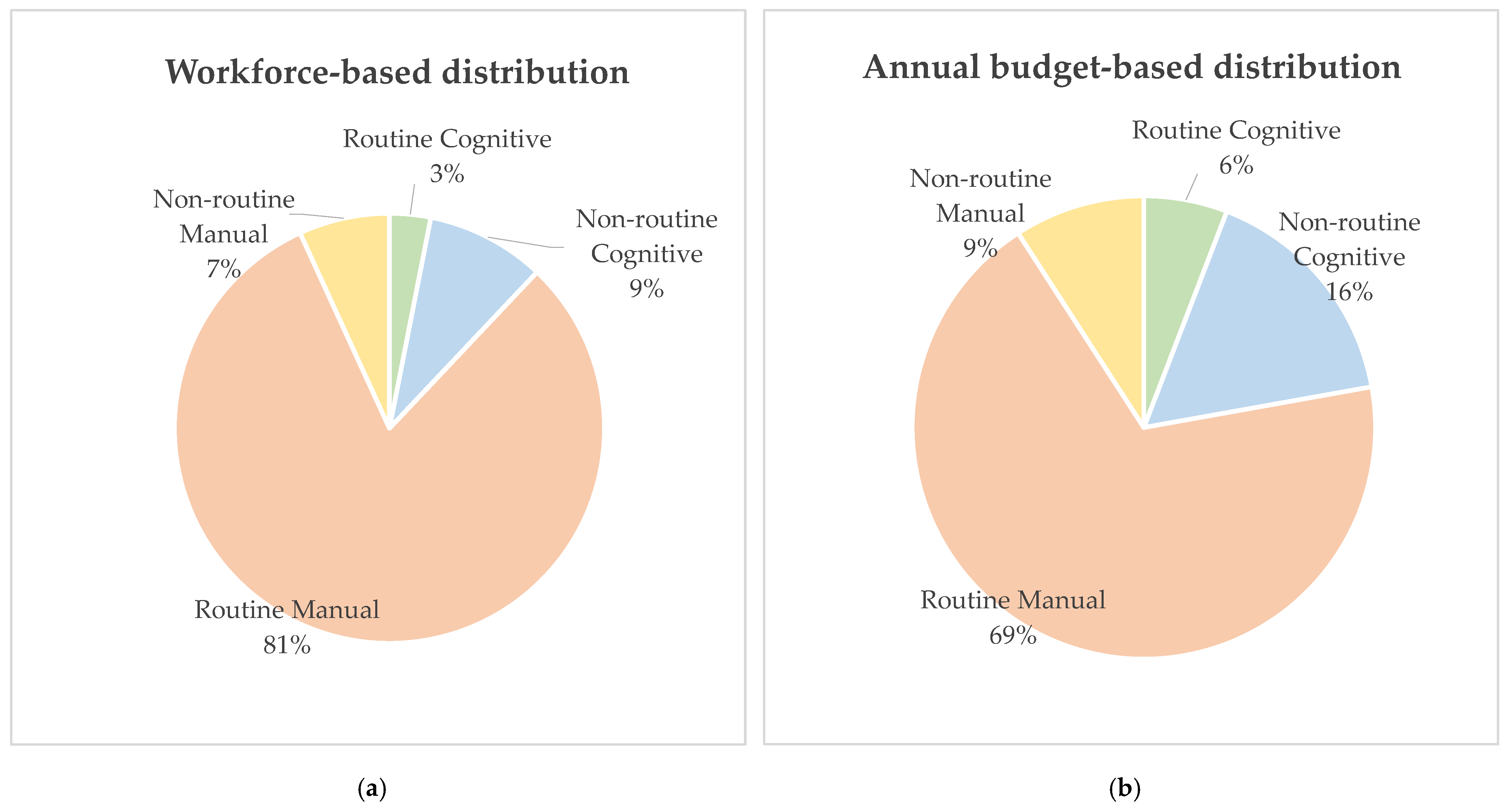
3.3. Reflections of Robotization on Agricultural Occupations Landscape
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bechar, A.; Vigneault, C. Agricultural robots for field operations: Concepts and components. Biosyst. Eng. 2016, 149, 94–111. [Google Scholar] [CrossRef]
- Eizicovits, D.; Berman, S. Efficient sensory-grounded grasp pose quality mapping for gripper design and online grasp planning. Rob. Auton. Syst. 2014, 62, 1208–1219. [Google Scholar] [CrossRef]
- Lampridi, M.; Kateris, D.; Sørensen, C.G.; Bochtis, D. Energy footprint of mechanized agricultural operations. Energies 2020, 13, 769. [Google Scholar] [CrossRef] [Green Version]
- Benos, L.; Tsaopoulos, D.; Bochtis, D. A review on ergonomics in agriculture. part I: Manual operations. Appl. Sci. 2020, 10, 1905. [Google Scholar] [CrossRef] [Green Version]
- Bechar, A.; Vigneault, C. Agricultural robots for field operations. Part 2: Operations and systems. Biosyst. Eng. 2017, 153, 110–128. [Google Scholar] [CrossRef]
- Hayashi, S.; Shigematsu, K.; Yamamoto, S.; Kobayashi, K.; Kohno, Y.; Kamata, J.; Kurita, M. Evaluation of a strawberry-harvesting robot in a field test. Biosyst. Eng. 2010, 105, 160–171. [Google Scholar] [CrossRef]
- Xiong, Y.; Peng, C.; Grimstad, L.; From, P.J.; Isler, V. Development and field evaluation of a strawberry harvesting robot with a cable-driven gripper. Comput. Electron. Agric. 2019, 157, 392–402. [Google Scholar] [CrossRef]
- Søgaard, H.T.; Lund, I. Application Accuracy of a Machine Vision-controlled Robotic Micro-dosing System. Biosyst. Eng. 2007, 96, 315–322. [Google Scholar] [CrossRef]
- Gonzalez-de-Soto, M.; Emmi, L.; Perez-Ruiz, M.; Aguera, J.; Gonzalez-de-Santos, P. Autonomous systems for precise spraying—Evaluation of a robotised patch sprayer. Biosyst. Eng. 2016, 146, 165–182. [Google Scholar] [CrossRef]
- Haibo, L.; Shuliang, D.; Zunmin, L.; Chuijie, Y. Study and Experiment on a Wheat Precision Seeding Robot. J. Robot. 2015, 2015. [Google Scholar] [CrossRef]
- Ruangurai, P.; Ekpanyapong, M.; Pruetong, C.; Watewai, T. Maejo International Journal of Science and Technology Automated three-wheel rice seeding robot operating in dry paddy fields. Maejo Int. J. Sci. Technol. 2015, 9, 403–412. [Google Scholar] [CrossRef]
- Bochtis, D.D.; Sørensen, C.G.; Jørgensen, R.N.; Nørremark, M.; Hameed, I.A.; Swain, K.C. Robotic weed monitoring. Acta Agric. Scand. Sect. B Soil Plant Sci. 2011, 61, 202–208. [Google Scholar] [CrossRef]
- Utstumo, T.; Urdal, F.; Brevik, A.; Dørum, J.; Netland, J.; Overskeid, Ø.; Berge, T.W.; Gravdahl, J.T. Robotic in-row weed control in vegetables. Comput. Electron. Agric. 2018, 154, 36–45. [Google Scholar] [CrossRef]
- Fountas, S.; Mylonas, N.; Malounas, I.; Rodias, E.; Hellmann Santos, C.; Pekkeriet, E. Agricultural Robotics for Field Operations. Sensors 2020, 20, 2672. [Google Scholar] [CrossRef]
- Moysiadis, V.; Tsolakis, N.; Katikaridis, D.; Sørensen, C.G.; Pearson, S.; Bochtis, D. Mobile robotics in agricultural operations: A narrative review on planning aspects. Appl. Sci. 2020, 10, 3453. [Google Scholar] [CrossRef]
- Shamshiri, R.R.; Weltzien, C.; Hameed, I.A.; Yule, I.J.; Grift, T.E.; Balasundram, S.K.; Pitonakova, L.; Ahmad, D.; Chowdhary, G. Research and development in agricultural robotics: A perspective of digital farming. Int. J. Agric. Biol. Eng. 2018. [Google Scholar] [CrossRef]
- Autor, D.H.; Levy, F.; Murnane, R.J. The skill content of recent technological change: An empirical exploration. Q. J. Econ. 2003, 118, 1279–1333. [Google Scholar] [CrossRef]
- Nevavuori, P.; Narra, N.; Lipping, T. Crop yield prediction with deep convolutional neural networks. Comput. Electron. Agric. 2019, 163, 104859. [Google Scholar] [CrossRef]
- Gutiérrez, S.; Diago, M.P.; Fernández-Novales, J.; Tardaguila, J. Vineyard water status assessment using on-the-go thermal imaging and machine learning. PLoS ONE 2018, 13, e0192037. [Google Scholar] [CrossRef] [PubMed]
- Anagnostis, A.; Asiminari, G.; Papageorgiou, E.; Bochtis, D. A convolutional neural networks based method for anthracnose infected walnut tree leaves identification. Appl. Sci. 2020, 10, 469. [Google Scholar] [CrossRef] [Green Version]
- Gao, J.; Liao, W.; Nuyttens, D.; Lootens, P.; Vangeyte, J.; Pižurica, A.; He, Y.; Pieters, J.G. Fusion of pixel and object-based features for weed mapping using unmanned aerial vehicle imagery. Int. J. Appl. Earth Obs. Geoinf. 2018, 67, 43–53. [Google Scholar] [CrossRef]
- Vasconez, J.P.; Kantor, G.A.; Auat Cheein, F.A. Human–robot interaction in agriculture: A survey and current challenges. Biosyst. Eng. 2019, 179, 35–48. [Google Scholar] [CrossRef]
- Adamides, G.; Katsanos, C.; Constantinou, I.; Christou, G.; Xenos, M.; Hadzilacos, T.; Edan, Y. Design and development of a semi-autonomous agricultural vineyard sprayer: Human-robot interaction aspects. J. F. Robot. 2017, 34, 1407–1426. [Google Scholar] [CrossRef]
- Bechar, A.; Edan, Y. Human-robot collaboration for improved target recognition of agricultural robots. Ind. Robot Int. J. 2003, 30, 432–436. [Google Scholar] [CrossRef]
- Bergerman, M.; Maeta, S.M.; Zhang, J.; Freitas, G.M.; Hamner, B.; Singh, S.; Kantor, G. Robot farmers: Autonomous orchard vehicles help tree fruit production. IEEE Robot. Autom. Mag. 2015, 22, 54–63. [Google Scholar] [CrossRef]
- Liakos, K.; Busato, P.; Moshou, D.; Pearson, S.; Bochtis, D.; Liakos, K.G.; Busato, P.; Moshou, D.; Pearson, S.; Bochtis, D. Machine Learning in Agriculture: A Review. Sensors 2018, 18, 2674. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Benos, L.; Tagarakis, A.C.; Dolias, G.; Berruto, R.; Kateris, D.; Bochtis, D. Machine learning in agriculture: A comprehensive updated review. Sensors 2021, 21, 3758. [Google Scholar] [CrossRef]
- Marinoudi, V.; Sørensen, C.G.; Pearson, S.; Bochtis, D. Robotics and labour in agriculture. A context consideration. Biosyst. Eng. 2019, 184, 111–121. [Google Scholar] [CrossRef]
- United States Bureau of Labor Statistics. Standard Occupational Classification. 2018. Available online: https://www.bls.gov/soc/ (accessed on 10 January 2021).
- O*NET Online. Preferences of Work Environments and Outcomes. 2020. Available online: https://www.onetonline.org/find/descriptor/browse/Interests (accessed on 10 January 2021).
- Bochtis, D.; Benos, L.; Lampridi, M.; Marinoudi, V.; Pearson, S.; Sørensen, C.G. Agricultural workforce crisis in light of the COVID-19 pandemic. Sustainability 2020, 12, 8212. [Google Scholar] [CrossRef]
- Frey, C.B.; Osborne, M.A. The future of employment: How susceptible are jobs to computerisation? Technol. Forecast. Soc. Chang. 2017, 114, 254–280. [Google Scholar] [CrossRef]
- Tervo, K.; Koivo, H.N. Adaptation of the human-machine interface to the human skill and dynamic characteristics. In Proceedings of the 19th World Congress, The International Federation of Automation Control, Cape Town, South Africa, 24–29 August 2014; Volume 47, pp. 3539–3544. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| a/n | Occupation | O*NET Code | Number of Tasks Described by O*NET |
|---|---|---|---|
| 1 | Nursery and Greenhouse Managers | 11-9013.01 | 20 |
| 2 | Farm and Ranch Managers | 11-9013.02 | 26 |
| 3 | Farm Labor Contractors | 13-1074.00 | 8 |
| 4 | Agricultural Engineers | 17-2021.00 | 13 |
| 5 | Animal Scientists | 19-1011.00 | 9 |
| 6 | Soil and Plant Scientists | 19-1013.00 | 20 |
| 7 | Agricultural Technicians | 19-4011.01 | 25 |
| 8 | Food Science Technicians | 19-4011.02 | 15 |
| 9 | First-Line Supervisors of Agricultural Crop and Horticultural Workers | 45-1011.07 | 24 |
| 10 | First-Line Supervisors of Animal Husbandry and Animal Care Workers | 45-1011.08 | 18 |
| 11 | Agricultural Inspectors | 45-2011.00 | 22 |
| 12 | Graders and Sorters, Agricultural Products | 45-2041.00 | 5 |
| 13 | Agricultural Equipment Operators | 45-2091.00 | 17 |
| 14 | Nursery Workers | 45-2092.01 | 21 |
| 15 | Farmworkers and Laborers, Crop | 45-2092.02 | 14 |
| 16 | Farmworkers, Farm, Ranch | 45-2093.00 | 22 |
| 17 | Farm Equipment Mechanics and Service Technicians | 49-3041.00 | 13 |
| Occupation | Code | Rate |
|---|---|---|
| Soil and Plant Scientists | 19-1013.00 | 0.04 |
| Animal Scientists | 19-1011.00 | 0.17 |
| First-Line Supervisors of Agricultural Crop and Horticultural Workers | 45-1011.07 | 0.17 |
| First-Line Supervisors of Animal Husbandry and Animal Care Workers | 45-1011.08 | 0.17 |
| Agricultural Technicians | 19-4011.01 | 0.19 |
| Agricultural Engineers | 17-2021.00 | 0.23 |
| Farm Equipment Mechanics and Service Technicians | 49-3041.00 | 0.23 |
| Farm Labor Contractors | 13-1074.00 | 0.32 |
| Farm and Ranch Managers | 11-9013.02 | 0.34 |
| Agricultural Inspectors | 45-2011.00 | 0.36 |
| Food Science Technicians | 19-4011.02 | 0.38 |
| Nursery and Greenhouse Managers | 11-9013.01 | 0.42 |
| Farmworkers, Farm, Ranch | 45-2093.00 | 0.46 |
| Farmworkers and Laborers, Crop | 45-2092.02 | 0.67 |
| Agricultural Equipment Operators | 45-2091.00 | 0.71 |
| Nursery Workers | 45-2092.01 | 0.74 |
| Graders and Sorters, Agricultural Products | 45-2041.00 | 0.95 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marinoudi, V.; Lampridi, M.; Kateris, D.; Pearson, S.; Sørensen, C.G.; Bochtis, D. The Future of Agricultural Jobs in View of Robotization. Sustainability 2021, 13, 12109. https://doi.org/10.3390/su132112109
Marinoudi V, Lampridi M, Kateris D, Pearson S, Sørensen CG, Bochtis D. The Future of Agricultural Jobs in View of Robotization. Sustainability. 2021; 13(21):12109. https://doi.org/10.3390/su132112109
Chicago/Turabian StyleMarinoudi, Vasso, Maria Lampridi, Dimitrios Kateris, Simon Pearson, Claus Grøn Sørensen, and Dionysis Bochtis. 2021. "The Future of Agricultural Jobs in View of Robotization" Sustainability 13, no. 21: 12109. https://doi.org/10.3390/su132112109
APA StyleMarinoudi, V., Lampridi, M., Kateris, D., Pearson, S., Sørensen, C. G., & Bochtis, D. (2021). The Future of Agricultural Jobs in View of Robotization. Sustainability, 13(21), 12109. https://doi.org/10.3390/su132112109