
Research on Truck Traffic Volume Conditions of Auxiliary Lanes on Two-Lane Highways


Abstract
:1. Introduction
2. Research Methodology
2.1. Determination of Test Elements
2.1.1. Driver
2.1.2. Vehicle
2.1.3. Highway
2.1.4. Environment
2.1.5. Test Apparatus
2.2. Test Plan
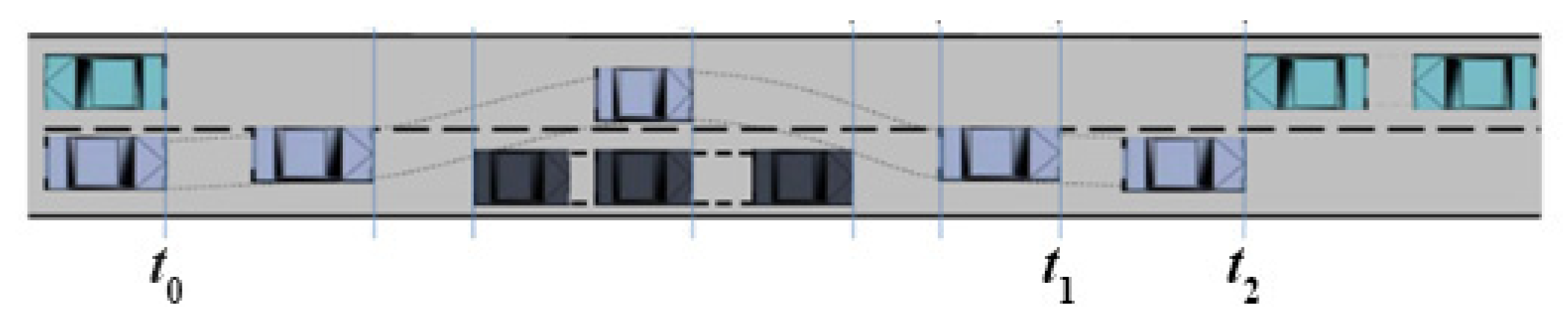
- When the driver is preparing to overtake, he reports this to the recorder. When the rear of the oncoming vehicle meets the front of the vehicle, the rear tester records the time t0 and the speed v0;
- When the driver starts to overtake and enters the opposite lane, the co-pilot tester records the speed v1 and the vehicle type being overtaken;
- When the driver changes lanes to the right and returns to his own lane after overtaking, the co-pilot tester records time t1 and vehicle speed v2;
- When the test vehicle meets the vehicle in the opposite lane, the co-pilot tester records time t2;
- The co-pilot tester calculates the driver’s overtaking time T2 = t2 − t0, and the overtaking conflict time Tc = t2 − t1;
- The rear tester calculates the headway T = (t2 − t0) + (v1 + v2)/2v0 × (t2 − t0) in the opposite lane;
- When the next overtaking behavior is observed, repeat steps 1~6 until the end of the test section;
- Test the next driver and repeat steps 1~7 until all test samples are tested. The test process is shown in Figure 1.
2.3. Data Analysis
2.4. Regression Analysis
2.4.1. Regression Fit
Overtaking Process Analysis
Modeling
2.4.2. Parameter Estimation
2.5. Risk Assessment Method
2.5.1. Applicability of Fisher Optimal Partition Method
2.5.2. Fisher Optimal Segmentation Step
Defining Sample
Definition and Calculation of Class Diameter
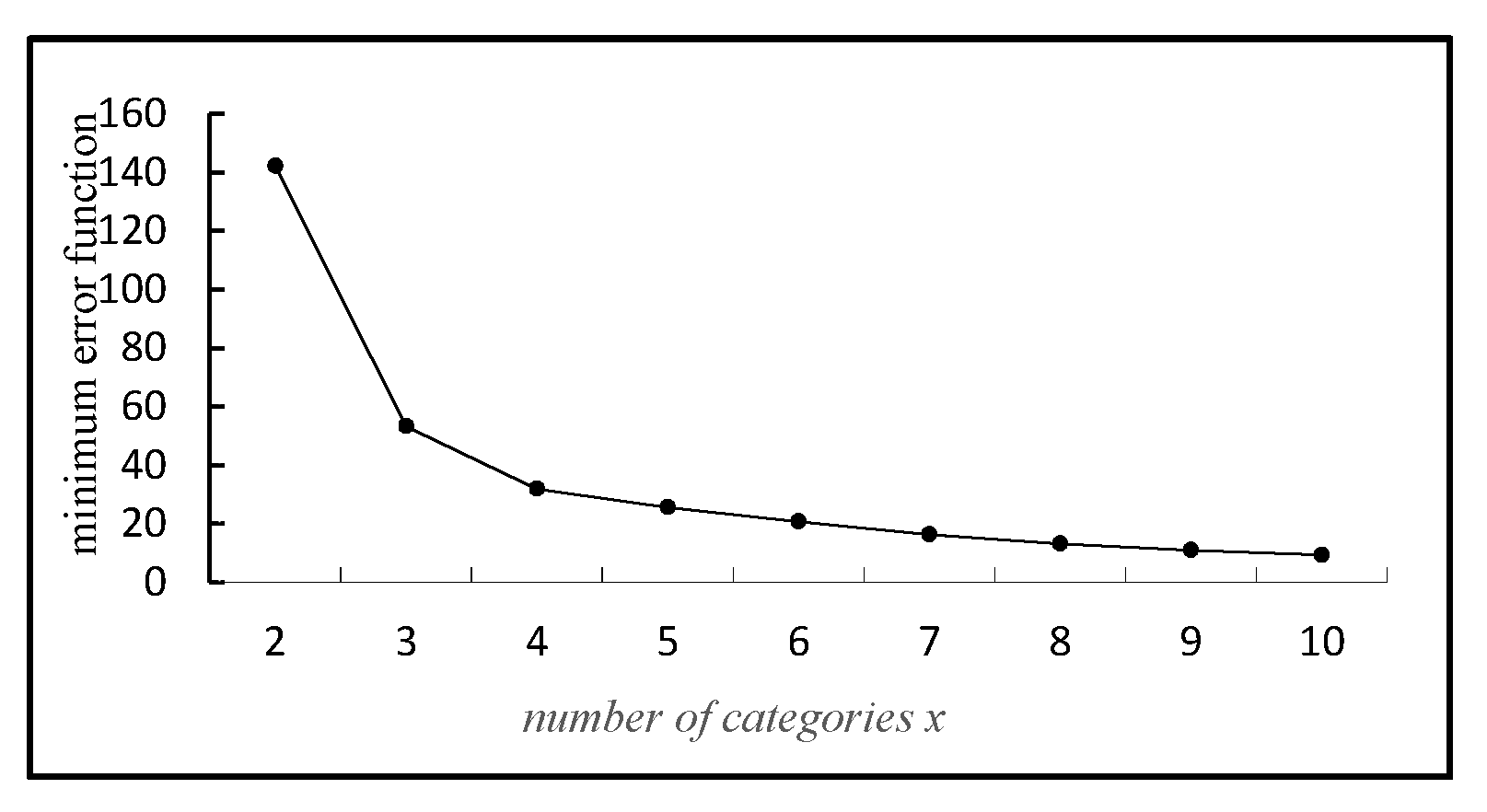
Calculating the Classification Error Function
Determining the Optimal Solution
Determining the Number of Optimal Solution Categories
3. Result and Discussion
3.1. Results of Regression Analysis
3.2. Results of Risk Assessment
3.3. The Freight Traffic Conditions of Setting Auxiliary Lanes
4. Conclusions
- (1)
- The paper takes the overtaking conflict time of the two-car highway as the risk evaluation index, selects suitable test sections for actual vehicle testing, analyzes the relationship between each test parameter and overtaking conflict time, constructs the two-lane highway overtaking conflict time Tc, and designs the relationship model between speed and traffic volume.
- (2)
- The paper defines an ordered sample of the overtaking conflict time Tc. The Fisher optimal partition method is used to evaluate the overtaking risk of a two-lane highway. According to the calculation results, the overtaking risk is divided into three levels: serious conflict, general conflict and non-conflict.
- (3)
- Through the constructed overtaking conflict time model, the relationship expression of traffic volume with conflict time Tc and design speed v is obtained, and different specific truck traffic conditions of different design speed and different risk levels are obtained.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jansuwan, S.; Chen, A.; Xu, X. Analysis of freight transportation network redundancy: An application to Utah’s bi-modal network for transporting coal. Transp. Res. Part A Policy Pract. 2021, 151, 154–171. [Google Scholar] [CrossRef]
- Stevenson, M.; Sharwood, L.N.; Wong, K.; Elkington, J.; Meuleners, L.; Ivers, R.Q.; Grunstein, R.R.; Williamson, A.; Haworth, N.; Norton, R. The Heavy Vehicle Study: A case-control study investigating risk factors for crash in long distance heavy vehicle drivers in Australia. BMC Public Health. 2010, 10, 162. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rowangould, G. Public financing of private freight rail infrastructure to reduce highway congestion: A case study of public policy and decision making in the United States. Transp. Res. Part A 2013, 57, 25–36. [Google Scholar] [CrossRef]
- Yuan, Q.; Wang, J. Goods movement, road safety, and spatial inequity: Evaluating freight-related crashes in low-income or minority neighborhoods. J. Transp. Geogr. 2021, 96, 103186. [Google Scholar] [CrossRef]
- Kanazawa, H.; Suzuki, M.; Onoda, T.; Yokozawa, N. Excess workload and sleep-related symptoms among commercial long-haul truck drivers. Sleep Biol. Rhythm. 2006, 4, 121–128. [Google Scholar] [CrossRef]
- Choudhari, T.; Budhkar, A.; Maji, A. Modeling overtaking distance and time along two-lane undivided rural highways in mixed traffic condition. Transp. Lett. 2020, 1–9. [Google Scholar] [CrossRef]
- Cantin, V.; Lavallière, M.; Simoneau, M.; Teasdale, N. Mental workload when driving in a simulator: Effects of age and driving complexity. Accid. Anal. Prev. 2009, 41, 763–771. [Google Scholar] [CrossRef]
- Khan, A.M. Bayesian-Monte Carlo Model for Collision Avoidance System Design of Cognitive Connected Vehicle. Int. J. Intell. Transp. Syst. Res. 2012, 11, 23–33. [Google Scholar] [CrossRef]
- Clarke, D.D.; Ward, P.J.; Jones, J. Overtaking Road-accidents: Differences in Maneuver as a Function of Driver Age. Accid. Anal. Prev. 1998, 30, 455–467. [Google Scholar] [CrossRef]
- Kim, S.; Song, T.-J.; Rouphail, N.M.; Aghdashi, S.; Amaro, A.; Gonçalves, G. Exploring the association of rear-end crash propensity and micro-scale driver behavior. Saf. Sci. 2016, 89, 45–54. [Google Scholar] [CrossRef]
- Pawar, N.M.; Velaga, N.R. Investigating the influence of time pressure on overtaking maneuvers and crash risk. Transp. Res. Part F Psychol. Behav. 2021, 82, 268–284. [Google Scholar] [CrossRef]
- Polus, A.; Livneh, M.; Frischer, B. Evaluation of the Passing Process on Two-Lane Rural Highways. Transp. Res. Rec. J. Transp. Res. Board 2000, 1701, 53–60. [Google Scholar] [CrossRef]
- Llorca, C.; García, A. Evaluation of Passing Process on Two-lane Rural Roads in Spain with New Methodology Based on Video Data. Transp. Res. Record 2011, 2262, 42–51. [Google Scholar] [CrossRef]
- Carlson, P.J.; Miles, J.D.; Johnson, P.K. Daytime High Speed Passing Maneuvers observed on Rural Two-Lane, Two-Way Highway: Findings and Implications. Transp. Res. Record 2006, 1961, 9. [Google Scholar] [CrossRef]
- Stefansson, E.; Jiang, F.J.; Nekouei, E.; Nilsson, H.; Johansson, K.H. Modeling the decision-making in human driver overtaking. IFAC-PapersOnLine 2020, 53, 15338–15345. [Google Scholar] [CrossRef]
- Farah, H. Age and Gender Differences in Overtaking Maneuvers on Two-lane Rural Highways. Transp. Res. Record 2011, 2248, 30–37. [Google Scholar] [CrossRef]
- Jenkins, J.M.; Rilett, L.R. Application of Distributed Traffic Simulation for Passing Behavior Study. Transp. Res. Rec. J. Transp. Res. Board 2004, 1899, 11–18. [Google Scholar] [CrossRef]
- Clarke, D.D.; Ward, P.J.; Jones, J. Processes and countermeasures in overtaking road accidents. Ergonomics 1999, 42, 846–867. [Google Scholar] [CrossRef]
- Molla, S.; Lopez, G.; Rasch, A.; Dozza, M.; García, A. Modelling duration of car-bicycles overtaking manoeuvres on two-lane rural roads using naturalistic data. Accid. Anal. Prev. 2021, 160, 106317. [Google Scholar] [CrossRef]
- Fisher, W.D. On Grouping for Maximum Homogeneity. J. Am. Stat. Assoc. 1958, 53, 789–798. [Google Scholar] [CrossRef]
- Cheng, G.Z.; Cheng, R.; Xu, L.; Zhang, W.H. Risk assessment of roadside accidents based on occupant injury analysis. J. Jilin Univ. 2020, 51, 875–885. [Google Scholar]
- Zhang, C.; Yang, S.X.; Feng, Y.W.; Xu, T.; Zhang, K.L. Expressway dyna mic risk discrimination method based on risk update theory. J. Chang. Univ. 2021, 41, 115–126. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
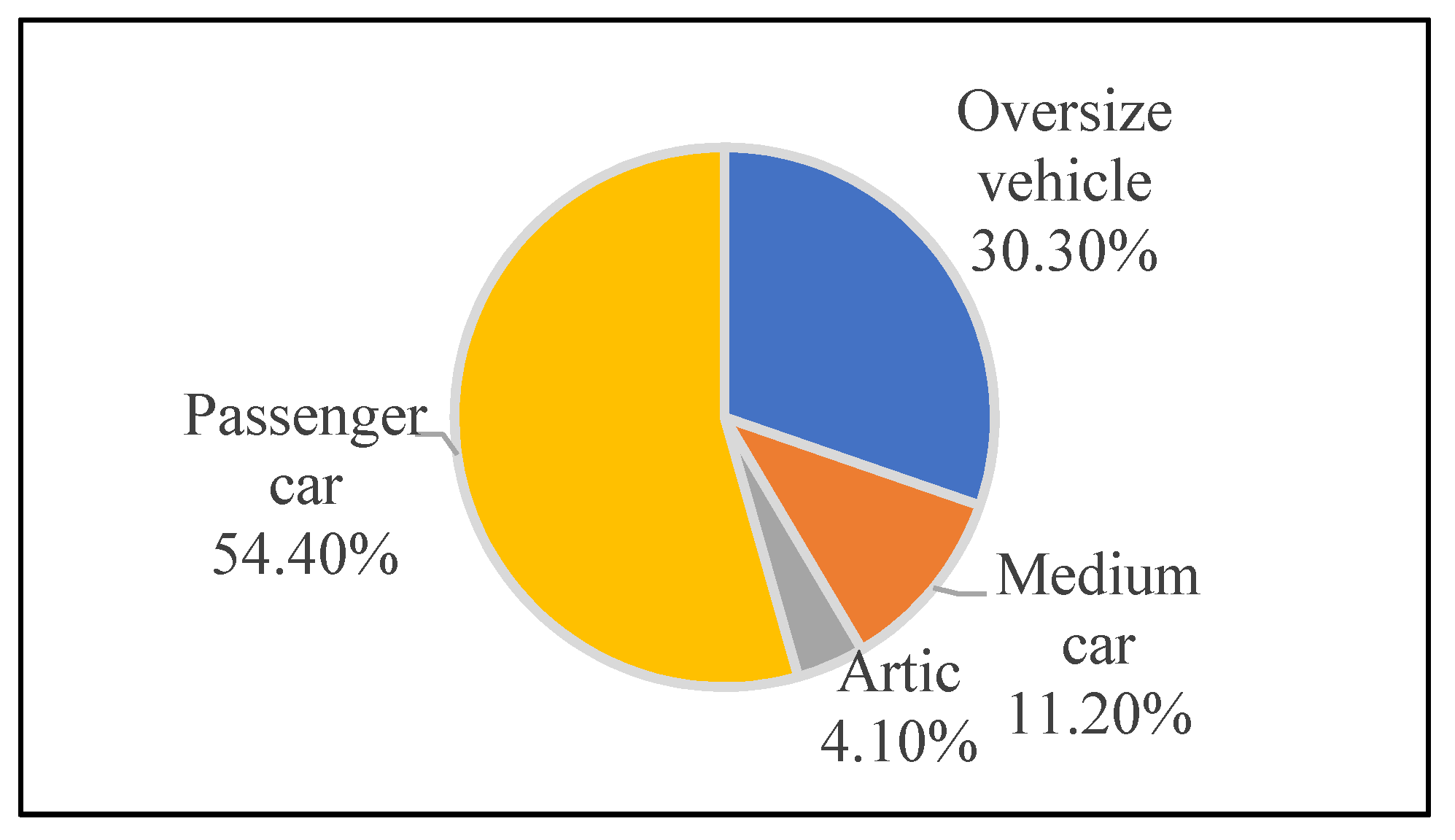
| Car Representative Model | Average Time for Overtaking (s) | Average Overtaking Speed (m/s) | Average of v2 | Overtaking Conflict Average Time (s) |
|---|---|---|---|---|
| Passenger car | 3.1 | 54.6 | 64.1 | 5.2 |
| Medium car | 3.1 | 57.3 | 64.0 | 4.9 |
| Oversize vehicle | 4.3 | 65.2 | 76.6 | 4.6 |
| Artic | 5.4 | 71.5 | 79.8 | 3.4 |
| Model | Input Variables | Variables Removed | Method |
|---|---|---|---|
| 1 | C, A, B | - | Input |
| Parameters | Estimation | 95% Confidence Interval | |
|---|---|---|---|
| Lower Limit | Upper Limit | ||
| n | 1.820 | 1.785 | 1.855 |
| p | 633.073 | 580.275 | 685.870 |
| Category | x | Minimum Error Function Value | Classification | ꞵ |
| Ordered samples of overtaking conflict time | 2 | 142.125 | {1~72}{73~315} | - |
| 3 | 53.271 | {1~55}{56~72}{73~315} | 1.69 | |
| 4 | 31.856 | {1~32}{33~55} {56~72}{73~315} | 1.47 | |
| 5 | 25.624 | {1~17}{18~32}{33~55} {56~72}{73~315} | - |
| Risk Level | Conflict Time Threshold | Conflict Level |
|---|---|---|
| I | (3 s~6 s] | Serious conflict |
| II | (6 s~9 s] | General conflict |
| III | (9 s~21 s] | No conflict |
| Traffic Conflict Level | Designed Speed (km/h) | |||
|---|---|---|---|---|
| 80 | 60 | 40 | 30 | |
| Serious conflict | >344 | >309 | >256 | >219 |
| General conflict | 259~344 | 238~309 | 206~256 | 181~219 |
| No conflict | <259 | <238 | <206 | <181 |
| The Design Speed | 80 (km/h) | 60 (km/h) | 40 (km/h) | 30 (km/h) | ||
|---|---|---|---|---|---|---|
| The Volume of Truck Traffic | ||||||
| Truck Ratio | ||||||
| 5% | 16 | 14 | 12 | 10 | ||
| 15% | 41 | 37 | 31 | 26 | ||
| 20% | 51 | 46 | 38 | 33 | ||
| 25% | 60 | 54 | 45 | 38 | ||
| 30% | 68 | 61 | 51 | 44 | ||
| 35% | 75 | 68 | 56 | 48 | ||
| 40% | 82 | 74 | 61 | 52 | ||
| 45% | 88 | 79 | 65 | 56 | ||
| 50% | 93 | 84 | 69 | 59 | ||
| 55% | 98 | 88 | 73 | 62 | ||
| 60% | 102 | 92 | 76 | 65 | ||
| 65% | 106 | 95 | 79 | 68 | ||
| 70% | 110 | 99 | 82 | 70 | ||
| 75% | 113 | 102 | 84 | 72 | ||
| 80% | 117 | 105 | 87 | 74 | ||
| 85% | 120 | 107 | 89 | 76 | ||
| 90% | 122 | 110 | 91 | 78 | ||
| 95% | 125 | 112 | 93 | 80 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, G.; Mu, C.; Xu, L.; Kang, X. Research on Truck Traffic Volume Conditions of Auxiliary Lanes on Two-Lane Highways. Sustainability 2021, 13, 13097. https://doi.org/10.3390/su132313097
Cheng G, Mu C, Xu L, Kang X. Research on Truck Traffic Volume Conditions of Auxiliary Lanes on Two-Lane Highways. Sustainability. 2021; 13(23):13097. https://doi.org/10.3390/su132313097
Chicago/Turabian StyleCheng, Guozhu, Changru Mu, Liang Xu, and Xuejian Kang. 2021. "Research on Truck Traffic Volume Conditions of Auxiliary Lanes on Two-Lane Highways" Sustainability 13, no. 23: 13097. https://doi.org/10.3390/su132313097