
Hybrid Architectural Network Implementation to Realize a Fire Evacuation Path with 2.4 GHz Zigbee and LoRa

 ,
,  , , and
, , and 
Abstract
1. Introduction
- In this study, a hybrid architecture was proposed and implemented to complete fire monitoring of buildings. The hybrid architecture integrates multiple systems such as a real-time vision-node for people estimation and smoke detection, an evacuation path display with the shortest algorithm, real-time monitoring of the building-related fire on the cloud server, and control of the water sprinklers through real-time sensor data.
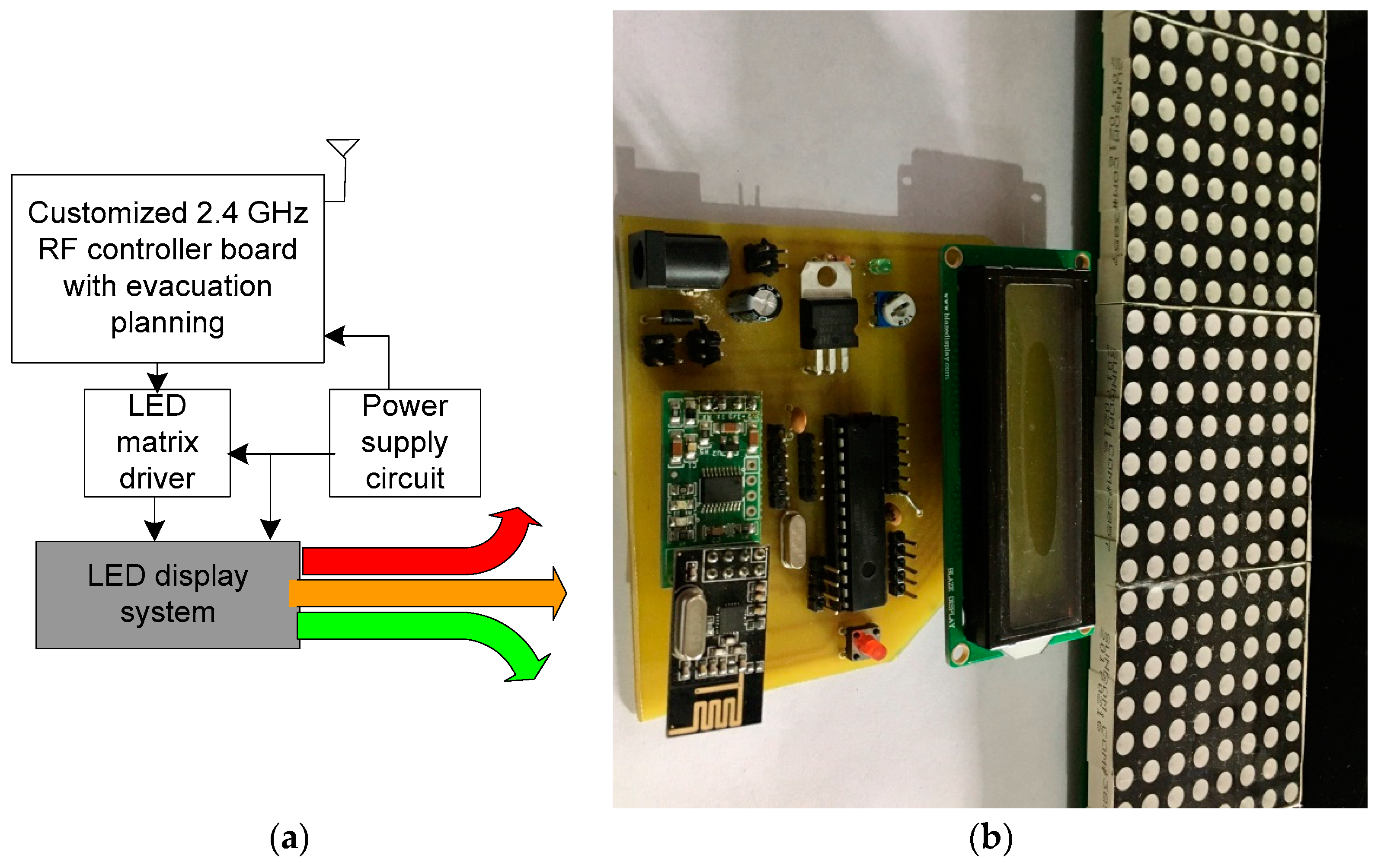
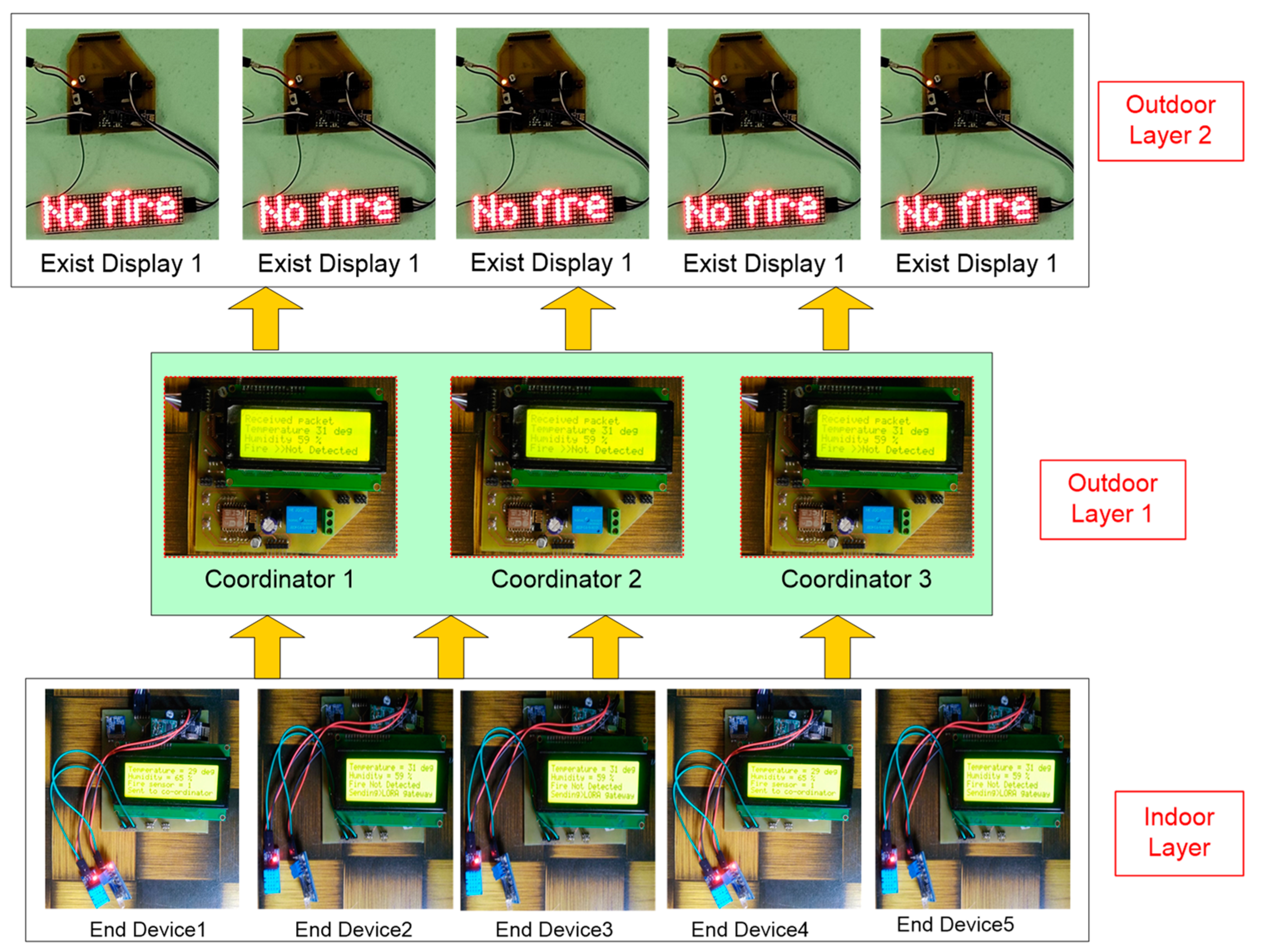
- Customized hardware is realized for real-time implementation with 2.4 GHz Zigbee and 433 MHz LoRa communication with a node mapping feature.
- A simulation of 2.4 GHz Zigbee and 433 MHz LoRa is carried out to analyze the behavior of network parameters.
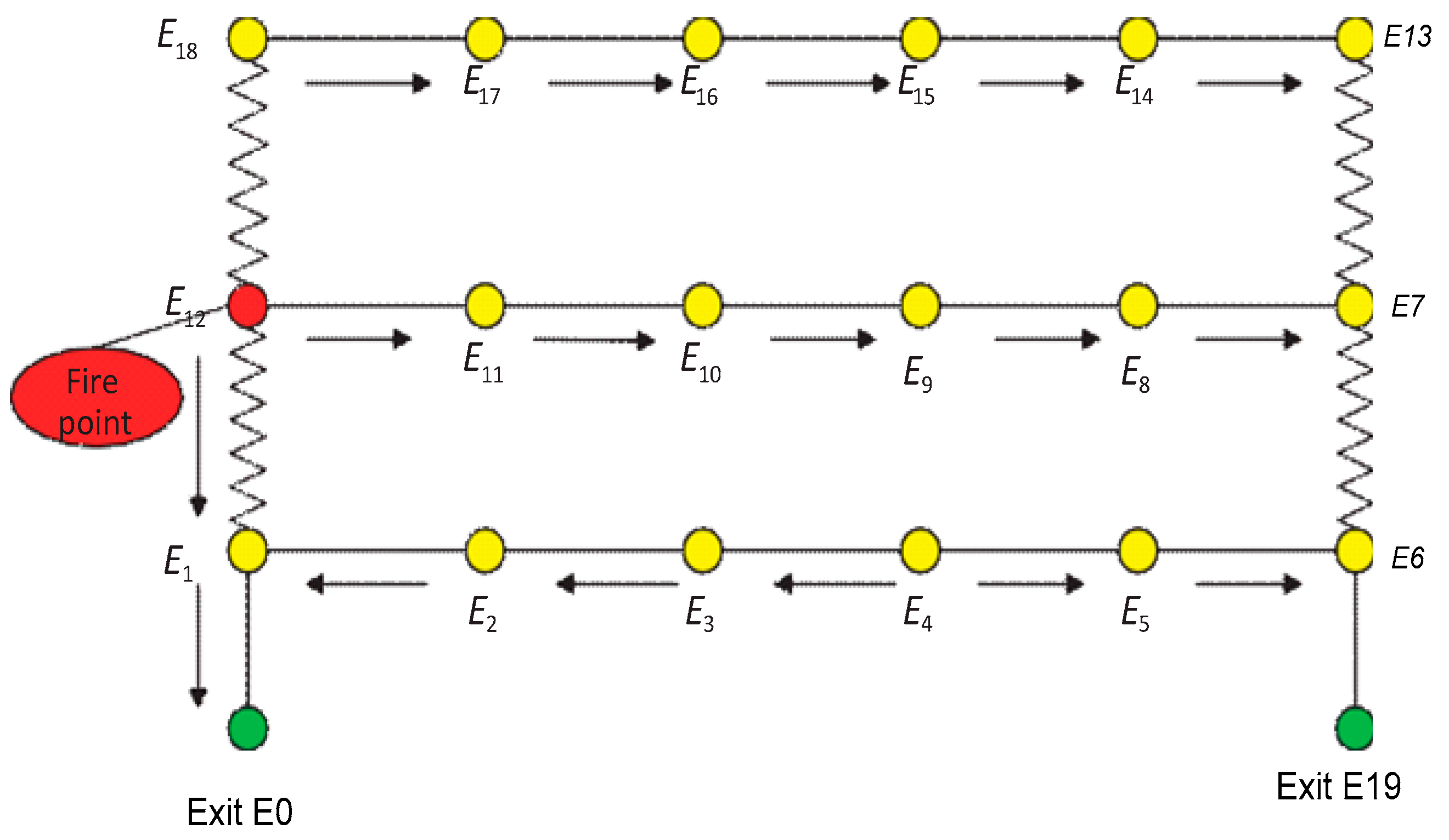
- The shortest path algorithm logged in the evacuation display controller shows the fire exit path based on sensor data received from the end devices.
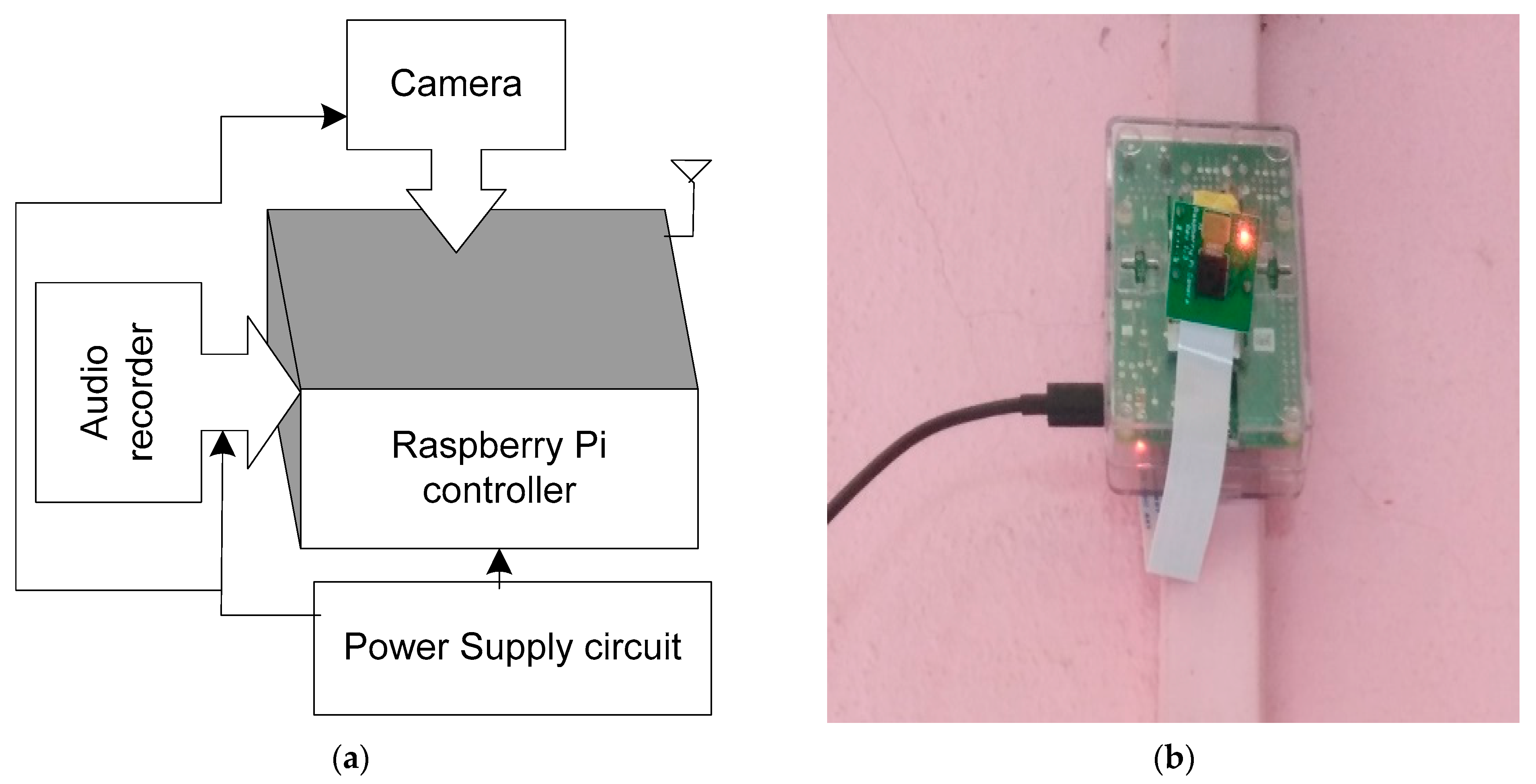
- The vision-based system with a web application also shows real-time visuals for fire status and people detection.
2. Literature Review
3. Overview of LoRa and Zigbee
3.1. LoRa
3.2. Zigbee
4. Proposed Architecture
5. Hardware Design
6. Simulation
6.1. Zigbee
6.1.1. End-to-End Delay
6.1.2. Throughput
6.1.3. Retransmission Attempts
6.2. LoRa
6.2.1. Time on Air (ToA)
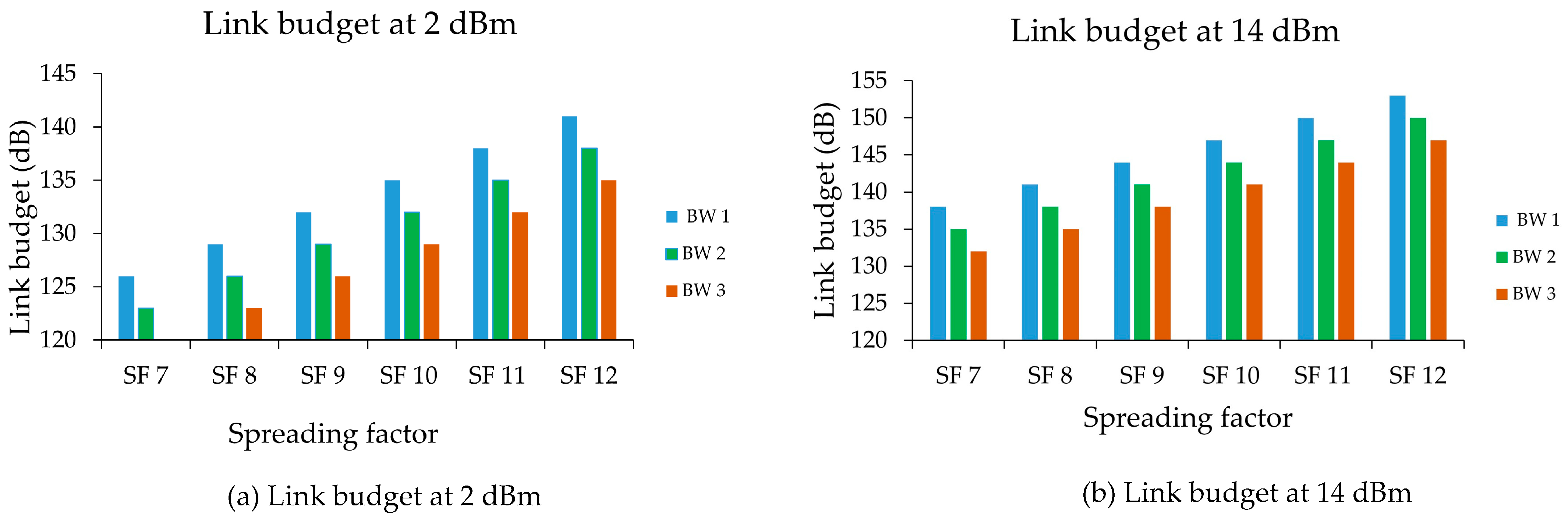
6.2.2. Link Budget
7. Experimental Results
7.1. Realtime Implementation
7.1.1. Vision Node
7.1.2. Evacuation Path
- Make a set called sptSet (shortest path tree set) to keep track of the vertices in the shortest-path tree, i.e., those whose minimal distance from the source is calculated and completed. This set is initially empty.
- Assign a distance value to each of the input graph’s vertices. All distance values should be set to INFINITE. Assign the source vertex a distance value of 0 to ensure that it is chosen first.
- Because sptSet does not contain all vertices.
- Choose a vertex u that is not in sptSet and has a minimum distance value.
- Add u to the sptSet.
- Update the distance between all of u’s adjacent vertices. Iterate through all nearby vertices to update the distance values. If the total distance value of u (from source) and the weight of edge u-v is less than the distance value of v for each neighboring vertex v, then update the distance value of v.
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ronchi, E.; Nilsson, D. Fire evacuation in high-rise buildings: A review of human behaviour and modelling research. Fire Sci. Rev. 2013, 2, 1–21. [Google Scholar] [CrossRef]
- Murali, L.G.; Vijayalakshmi, M.M. Fire accidents in buildings–Case studies. Int. J. Eng. Trends Technol. 2014, 11, 178–184. [Google Scholar] [CrossRef]
- Birajdar, G.S.; Singh, R.; Gehlot, A.; Thakur, A.K. Development in building fire detection and evacuation system-a comprehensive review. Int. J. Electr. Comput. Eng. (IJECE) 2020, 10, 6644–6654. [Google Scholar] [CrossRef]
- Han, D.; Lee, B. Flame and smoke detection method for early real-time detection of a tunnel fire. Fire Saf. J. 2009, 44, 951–961. [Google Scholar] [CrossRef]
- Swain, M.; Zimon, D.; Singh, R.; Hashmi, M.F.; Rashid, M.; Hakak, S. LoRa-LBO: An Experimental Analysis of LoRa Link Budget Optimization in Custom Build IoT Test Bed for Agriculture 4.0. Agronomy 2021, 11, 820. [Google Scholar] [CrossRef]
- Gehlot, A.; Alshamrani, S.S.; Singh, R.; Rashid, M.; Akram, S.V.; AlGhamdi, A.S.; Albogamy, F.R. Internet of Things and Long-Range-Based Smart Lampposts for Illuminating Smart Cities. Sustainability 2021, 13, 6398. [Google Scholar] [CrossRef]
- al Rasyid, M.U.H.; Enda, D.; Saputra, F.A. Smart Home System for Fire Detection Monitoring Based on Wireless Sensor Network. In Proceedings of the 2019 International Electronics Symposium (IES), Surabaya, Indonesia, 27–28 September 2019; pp. 189–194. [Google Scholar]
- Singh, R.; Gehlot, A.; Thakur, A.K.; Swain, M.; Akram, S.V. Wireless Sensor Network with Power Management System for Water Level Regulation in Paddy Fields. Int. J. Innov. Technol. Explor. Eng. (IJITEE) 2020, 9, 1243–1246. [Google Scholar]
- Gehlot, A.; Singh, R.; Thakur, A.K.; Choudhury, S.; Das, P.K.; Gupta, K.V. Wireless Monitoring and Acquisition of Engine Noise Data Using IoT. Int. J. Eng. Appl. (IREA) 2020, 8, 215–222. [Google Scholar] [CrossRef]
- Moon, S.-R.; Cho, J.-H. Study on IoT-based Map Inside the Building and Fire Perception System. J. Digit. Converg. 2019, 17, 85–90. [Google Scholar]
- Singh, R.; Gehlot, A.; Akram, S.V.; Thakur, A.K.; Buddhi, D.; Das, P.K. Forest 4.0: Digitalization of forest using the Internet of Things (IoT). J. King Saud Univ.-Comput. Inf. Sci. 2021, 1–15. [Google Scholar] [CrossRef]
- Sendra, S.; García, L.; Lloret, J.; Bosch, I.; Vega-Rodríguez, R. LoRaWAN network for fire monitoring in rural environments. Electronics 2020, 9, 531. [Google Scholar] [CrossRef]
- Malik, P.K.; Sharma, R.; Singh, R.; Gehlot, A.; Satapathy, S.C.; Alnumay, W.S.; Pelusi, D.; Ghosh, U.; Nayak, J. Industrial Internet of Things and its applications in industry 4.0: State of the art. Comput. Commun. 2020, 166, 125–139. [Google Scholar] [CrossRef]
- Adeel, A.; Gogate, M.; Farooq, S.; Ieracitano, C.; Dashtipour, K.; Larijani, H.; Hussain, A. A survey on the role of wireless sensor networks and IoT in disaster management. In Geological Disaster Monitoring Based on Sensor Networks; Springer: Singapore, 2019; pp. 57–66. [Google Scholar]
- Akram, S.V.; Singh, R.; AlZain, M.A.; Gehlot, A.; Rashid, M.; Faragallah, O.S.; El-Shafai, W.; Prashar, D. Performance Analysis of IoT and Long-Range Radio-Based Sensor Node and Gateway Architecture for Solid Waste Management. Sensors 2021, 21, 2774. [Google Scholar] [CrossRef]
- Gehlot, A.; Singh, R.; Thakur, K.A.; Pandey, R. Design and Development of Wireless Fan Regulator using ZigBee Concept. Int. J. 2020, 9, 4189–4194. [Google Scholar] [CrossRef]
- Swain, M.; Hashmi, M.F.; Singh, R.; Hashmi, A.W. A cost-effective LoRa-based customized device for agriculture field monitoring and precision farming on IoT platform. Int. J. Commun. Syst. 2020, 36, e4632. [Google Scholar] [CrossRef]
- Bahamid, A.; Ibrahim, A.M.; Ibrahim, A.; Zahurin, I.Z.; Wahid, A.N. Intelligent robot-assisted evacuation: A review. In Journal of Physics: Conference Series; IOP Publishing: Coimbatore, India, 2020; Volume 1706, p. 012159. [Google Scholar]
- Zhang, Q.; Chen, T.; Lv, X.Z. New framework of intelligent evacuation system of buildings. Procedia Eng. 2014, 71, 397–402. [Google Scholar] [CrossRef]
- Ibrahim, A.M.; Venkat, I.; Subramanian, K.; Khader, A.T.; Wilde, P.D. Intelligent evacuation management systems: A review. ACM Trans. Intell. Syst. Technol. (TIST) 2016, 7, 1–27. [Google Scholar] [CrossRef]
- Huixian, J.; Shaoping, Z. Design of Intelligent Fire-Fighting System of a Big Public Building Emergency Evacuation Navigation System for Mobile Terminal. In Proceedings of the 2018 13th International Conference on Computer Science & Education (ICCSE), Colombo, Sri Lanka, 8–11 August 2018; pp. 1–6. [Google Scholar]
- Saeed, F.; Paul, A.; Rehman, A.; Hong, W.H.; Seo, H. IoT-based intelligent modeling of smart home environment for fire prevention and safety. J. Sens. Actuator Netw. 2018, 7, 11. [Google Scholar] [CrossRef]
- Gokceli, S.; Zhmurov, N.; Kurt, G.K.; Ors, B. IoT in action: Design and implementation of a building evacuation service. J. Comput. Netw. Commun. 2017, 2017, 1–13. [Google Scholar] [CrossRef]
- Majumder, S.; O’Neil, S.; Kennedy, R. Smart apparatus for fire evacuation—An IoT based fire emergency monitoring and evacuation system. In Proceedings of the 2017 IEEE MIT Undergraduate Research Technology Conference (URTC), Cambridge, MA, USA, 3–5 November 2017; pp. 1–4. [Google Scholar]
- Guan, Y.; Fang, Z.; Wang, T. Fire risk assessment and daily maintenance management of cultural relic buildings based on ZigBee technology. Procedia Eng. 2018, 211, 192–198. [Google Scholar] [CrossRef]
- Chittaro, L.; Nadalutti, D. A mobile RFID-based system for supporting evacuation of buildings. In International Workshop on Mobile Information Technology for Emergency Response; Springer: Berlin/Heidelberg, Germany, 2008; pp. 22–31. [Google Scholar]
- Angel, A.S.; Jayaparvathy, R. Design and implementation of an intelligent emergency evacuation system. In Proceedings of the 2017 International Conference on Computation of Power, Energy Information and Commuincation (ICCPEIC), Melmaruvathur, India, 22–23 March 2017; pp. 13–17. [Google Scholar]
- Yu, K.-M.; Yu, C.-S.; Lien, C.-C.; Cheng, S.-T.; Lei, M.-Y.; Hsu, H.-P.; Tsai, N. Intelligent evacuation system integrated with image recognition technology. In Proceedings of the 2015 8th International Conference on Ubi-Media Computing (UMEDIA), Colombo, Sri Lanka, 24–26 August 2015; pp. 23–28. [Google Scholar]
- Chung, N.-E.; Yu, K.-M.; Hsu, H.-P.; Cheng, S.-T.; Lien, C.-C.; Lei, M.-Y.; Tsai, N. An effectiveness study of an intelligent emergency evacuation system using field verification techniques. In Proceedings of the 2017 Sixth International Conference on Future Generation Communication Technologies (FGCT), Dublin, Ireland, 21–23 August 2017; pp. 1–6. [Google Scholar]
- Hsu, H.P.; Yu, K.M.; Chine, S.T.; Cheng, S.T.; Lei, M.Y.; Tsai, N. Emergency evacuation base on intelligent digital signage systems. In Proceedings of the 2014 7th International Conference on Ubi-Media Computing and Workshops, Ulaanbaatar, Mongolia, 12–14 July 2014; pp. 243–247. [Google Scholar]
- Zhang, J.; Issa, R.R.A.; Liu, R. A cyber-physical system approach for intelligent building emergency evacuation signage guidance. In Proceedings of the Construction Research Congress, New Orleans, LA, USA, 2–4 April 2018; pp. 535–541. [Google Scholar]
- Wang, B.; Li, H.; Rezgui, Y.; Bradley, A.; Ong, H.N. BIM based virtual environment for fire emergency evacuation. Sci. World J. 2014, 2014, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Poy, H.M.; Duffy, B. A cloud-enabled building and fire emergency evacuation application. IEEE Cloud Comput. 2014, 1, 40–49. [Google Scholar] [CrossRef]
- Han, Z.; Weng, W.; Zhao, Q.; Ma, X.; Liu, Q.; Huang, Q. Investigation on an integrated evacuation route planning method based on real-time data acquisition for high-rise building fire. IEEE Trans. Intell. Transp. Syst. 2013, 14, 782–795. [Google Scholar] [CrossRef]
- Chu, L.; Wu, S.-J. An integrated building fire evacuation system with RFID and cloud computing. In Proceedings of the 2011 Seventh International Conference on Intelligent Information Hiding and Multimedia Signal Processing, Dalian, China, 14–16 October 2011; pp. 17–20. [Google Scholar]
- Zhang, Y.; Yu, J. A study on the fire IOT development strategy. Procedia Eng. 2013, 52, 314–319. [Google Scholar] [CrossRef]
- Annadata, P.; Eltarjaman, W.; Thurimella, R. Person detection techniques for an IoT based emergency evacuation assistance system. In Proceedings of the Adjunct Proceedings of the 13th International Conference on Mobile and Ubiquitous Systems: Computing Networking and Services, Hiroshima, Japan, 28 November–1 December 2016; pp. 77–82. [Google Scholar]
- Katayama, K.; Takahashi, H.; Yokoyama, S.; Gäfvert, K.; Kinoshita, T. Evacuation guidance support using cooperative agent-based IoT devices. In Proceedings of the 2017 IEEE 6th Global Conference on Consumer Electronics (GCCE), Nagoya, Japan, 24–27 October 2017; pp. 1–2. [Google Scholar]
- Xu, X.; Zhang, L.; Sotiriadis, S.; Asimakopoulou, E.; Li, M.; Bessis, N. CLOTHO: A large-scale Internet of Things-based crowd evacuation planning system for disaster management. IEEE Internet Things J. 2018, 5, 3559–3568. [Google Scholar] [CrossRef]
- Al-Nabhan, N.; Al-Aboody, N.; al Islam, A.B.M.A. A hybrid IoT-based approach for emergency evacuation. Comput. Netw. 2019, 155, 87–97. [Google Scholar] [CrossRef]
- Du, Y.; Wu, Q.; Yao, Y.; Zhao, Y.; Zhang, X.; Hao, Z.; Xu, H.; Du, Z. A cloud-based service for emergency evacuation of mine water inrush accidents. Concurr. Comput. Pract. Exp. 2021, 33, e6125. [Google Scholar] [CrossRef]
- Lee, D.; Kim, D.; Lee, J.; Lee, S.; Hwang, H.; Mariappan, V.; Lee, M.; Cha, J. Environment Adaptive Emergency Evacuation Route GUIDE through Digital Signage Systems. Int. J. Adv. Cult. Technol. 2017, 5, 90–97. [Google Scholar] [CrossRef][Green Version]
- Fong, S.; Bhatt, C.; Korzun, D.; Yang, S.-H.; Yang, L. Internet of Breath (IoB): Integrative indoor gas sensor applications for emergency control and occupancy detection. In First International Conference on Real Time Intelligent Systems; Springer: Cham, Switzerland; Casablanca, Morocco, 2017; pp. 342–359. [Google Scholar]
- Chou, J.-S.; Cheng, M.-Y.; Hsieh, Y.-M.; Yang, I.-T.; Hsu, H.-T. Optimal path planning in real time for dynamic building fire rescue operations using wireless sensors and visual guidance. Autom. Constr. 2019, 99, 1–17. [Google Scholar] [CrossRef]
- XIE, X.-h.; LV, Y.-f.; MU, Z.-y.; BIAN, P.-x.; Jie, J.; XU, L.-m.; Neng, W. An Intelligent Smoke Detector System Based on LoRa and Indoor Positioning. In Proceedings of the International Conference on Computer, Communication and Network Technology, Chengdu, China, 29–30 June 2018. [Google Scholar]
- Chen, Y.; Gao, P.; Li, Z. Design of Security Alarm System Based on LoRa Technology. In International Conference on Geo-Informatics in Sustainable Ecosystem and Society; Springer: Singapore, 2018; pp. 280–288. [Google Scholar]
- Zou, Z.C.; Leng, H.; Wu, K.L.; Su, W.Q. Intelligent space for building fire detection and evacuation decision support. In Proceedings of the International Conference of Electrical, Automation and Mechanical Engineering, Phuket, Thailand, 26–27 July 2015; pp. 365–368. [Google Scholar]
- Yu, K.M.; Chen, Y.C.; Liu, C.H.; Hsu, H.P.; Lei, M.Y.; Tsai, N. IFPSS: Intelligence fire point sensing systems in AIoT environments. In Proceedings of the 2019 International Conference on Image and Video Processing, and Artificial Intelligence. Int. Soc. Opt. Photonics 2019, 11321, 113212T. [Google Scholar]
- Mekki, K.; Bajic, E.; Chaxel, F.; Meyer, F. A comparative study of LPWAN technologies for large-scale IoT deployment. ICT Express 2019, 5, 1–7. [Google Scholar] [CrossRef]
- Sethi, P.; Sarangi, S.R. Internet of Things: Architectures, Protocols, and Applications. J. Electr. Comput. Eng. 2017, 2017, 1–25. [Google Scholar] [CrossRef]
- Makariye, N. Towards shortest path computation using Dijkstra algorithm. In Proceedings of the 2017 International Conference on IoT and Application (ICIOT), Nagapattinam, India, 19–20 May 2017; pp. 1–3. [Google Scholar]
- Wehbe, R.; Shahrour, I. A BIM-Based Smart System for Fire Evacuation. Future Internet 2021, 13, 221. [Google Scholar] [CrossRef]
- Xie, K.; Liu, Z.; Fu, L.; Liang, B. Internet of Things-based intelligent evacuation protocol in libraries. Libr. Hi Tech. 2019, 38, 145–160. [Google Scholar] [CrossRef]
- Karagiannidis, L.; Misichroni, F.; Damigos, Y.; Tsertou, A.; Amditis, A. A novel and interoperable communication gateway implementation for evacuation systems. In Proceedings of the 2016 International Wireless Communications and Mobile Computing Conference (IWCMC), Paphos, Cyprus, 5–9 September 2016; pp. 1045–1050. [Google Scholar]
- Liu, J.W.S.; Lin, F.T.; Chu, E.T.H.; Zhong, J.L. Intelligent indoor emergency evacuation systems: Reference architecture and data requirements. In Proceedings of the 2016 Future Technologies Conference (FTC), San Francisco, CA, USA, 6–7 December 2016; pp. 600–609. [Google Scholar]
- Zavin, A.; Anzum, F.; Rahman, S.F.; Islam, M.N.; Hoque, M. Towards Developing an Intelligent Fire Exit Guidance System Using Informed Search Technique. In Proceedings of the 2018 21st International Conference of Computer and Information Technology (ICCIT), Dhaka, Bangladesh, 21–23 December 2018; pp. 1–6. [Google Scholar]
- Nguyen, V.Q.; Nguyen, H.D.; Huynh, Q.T.; Venkatasubramanian, N.; Kim, K. A scalable approach for dynamic evacuation routing in large smart buildings. In Proceedings of the 2019 IEEE International Conference on Smart Computing (SMARTCOMP), Washington, DC, USA, 12–15 June 2019; pp. 292–300. [Google Scholar]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Network Layer Parameters | |
| Zigbee End device | 07 |
| Zigbee router | 03 |
| Zigbee Coordinator | 1 |
| Packet size | 1024 kbps (cont) |
| Packet interval time | Constant (1.0) |
| Physical Layer Parameters | |
| Transmission band | 2.4 GHz |
| Transmission Power | 0.05 W |
| Receiver Sensitivity | –85 |
| Data rate | Auto calculate |
| Starting Node | Exit | Distance | Evacuation Route |
|---|---|---|---|
| E1 | E0 | 7.0 m | E1→E0 |
| E2 | 14.5 m | E2→E1→E0 | |
| E3 | 21.0 m | E3→E2→E1→E0 | |
| E10 | 29.0 m | E10→E11→E12→E1→E0 | |
| E11 | 21.5 m | E11→E12→E1→E0 | |
| E12 | 14.0 m | E12→E1→E0 | |
| E16 | 36.0 m | E16→E17→E18→E12→E1→E0 | |
| E17 | 28.5 m | E17→E18→E12→E1→E0 | |
| E18 | 21.0 m | E18→E12→E1→E0 | |
| E4 | E19 | 21.0 m | E4→E5→E6→E19 |
| E5 | 14.5 m | E5→E6→E19 | |
| E6 | 7.0 m | E6→E19 | |
| E7 | 14.0 m | E7→E6→E19 | |
| E8 | 21.5 m | E8→E7→E6→E19 | |
| E9 | 29.0 m | E9→E8→E7→E6→E19 | |
| E13 | 21.0 m | E13→E7→E6→E19 | |
| E14 | 28.5 m | E14→E13→E7→E6→E19 | |
| E15 | 36.0 m | E15→E14→E13→E7→E6→E19 |
| Starting Node | Destination Node | Distance | Evacuation Route |
|---|---|---|---|
| E1 | 0 | 7.0 m | E1→E0 |
| E2 | 14.5 m | E2→E1→E0 | |
| E3 | 21.0 m | E3→E2→E1→E0 | |
| E12 | 14.0 m | E12→E1→E0 | |
| E4 | 19 | 21.0 m | E4→E5→E6→E19 |
| E5 | 14.5 m | E5→E6→E19 | |
| E6 | 7.0 m | E6→E19 | |
| E7 | 14.0 m | E7→E6→E19 | |
| E8 | 21.5 m | E8→E7→E6→E19 | |
| E9 | 29.0 m | E9→E8→E7→E6→E19 | |
| E10 | 36.5 m | E10→E9→E8→E7→E6→E19 | |
| E11 | 44.0 m | E11→E10→E9→E8→E7→E6→E19 | |
| E13 | 21.0 m | E13→E7→E6→E19 | |
| E14 | 28.5 m | E14→E13→E7→E6→E19 | |
| E15 | 36.0 m | E15→E14→E13→E7→E6→E19 | |
| E16 | 43.5 m | E16→E15→E14→E13→E7→E6→E19 | |
| E17 | 51.0 m | E17→E16→E15→E14→E13→E7→E6→E19 | |
| E18 | 58.5 m | E18→E17→E16→E15→E14→E13→E7→E6→E19 |
| Ref. | Hardware Platform | Data Collecting Device | Network Simulation Analysis | Communication Technology | Evacuation Path Display |
|---|---|---|---|---|---|
| [3] | Ardunio | RFM23B RFID, LM35 Temperature Sensor, HC-05 Bluetooth Module, PIR Sensor | Not implemented | Bluetooth Technology | Audio Signal, Text Message on user mobile. |
| [8] | MT(mobile terminal) indoor location technology and its Bluetooth | Temperature | Not implemented | Bluetooth Technology | Sending Alarm message to User Mobile with fire location |
| [9] | Raspberry Pi | Temp. Sensor (LM 35), Smoke Sensor and Gas Sensor (MQ9) | Not implemented | GSM Wireless Sensor Networks | No work on evacuation |
| [29] | IoT Hardware: Turtlebot2, Parrot AR. Drone 2.0 &a DJI Phantom 4 | Illuminance sensor, Arduino Uno as a sensor | Not implemented | Wireless | Application on Mobile |
| [48] | Microcontroller, wireless transceiver, and Wi-Fi module based hardware | Temperature sensor | Network simulation is not carried out in the study | Wi-Fi | Web application based evacuation path through Wi-Fi connectivity |
| [52] | Fire Dynamic Simulation (FDS) and building information modeling (BIM) are utilized to implement fire evacuation | Temperature, smoke, and CO2 sensor | The network analysis of communication protocol is not carried out | Not mentioned in the study | A simulation-based evacuation path is carried out |
| [53] | Pathfinder software is used to simulate fire locations and evacuation routes | Temperature and smoke sensor | The study is carried out on a simulation basis. No network is implemented. | As it is a simulation based study, no communication protocol is utilized | Evacuation simulation is carried out in this study for libraries |
| [54] | The proposed communication gateway for evacuation system | No information available | Software communication gateway is carried out, so no network analysis is carried out | Event-Based Systems and Service-Oriented Architecture | A simulation-based system is carried out to analyze evacuation |
| [55] | A data model and reference architecture of an intelligent evacuation system is proposed for large public building | No information available | The study proposed a framework to implement evacuation, so no network analysis is carried out | A case study with the proposed architecture is carried out on a software platform. No communication is utilized | A software platform-based evacuation system is proposed. |
| [56] | An intelligent automated fire exit guidance system using A* search algorithm has been presented | No information available | A* search algorithm is applied on the software platform. So no information on the network is available | The system is not implemented in an outdoor environment, so no communication protocol is part of this study. | A* search algorithm is used for the safest optimal path |
| [57] | Caching strategy which expedites dynamic route generation with the currently effective route | No information available | A simulation-based approach is carried out. So the importance of network analysis is not implemented | The role of communication is not required as the study implemented simulator-based analysis | Length-Capacity-Density-Trust for evacuation path |
| Proposed | Zigbee and LoRa based hardware | Sensor and Vision Node | OPNET Simulator for Zigbee and evaluation metrics of LoRa | Zigbee and LoRa | Cloud server, Web Application, and Dynamic Display |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Singh, R.; Birajdar, G.S.; Rashid, M.; Gehlot, A.; Akram, S.V.; AlGhamdi, A.S.; Alshamrani, S.S. Hybrid Architectural Network Implementation to Realize a Fire Evacuation Path with 2.4 GHz Zigbee and LoRa. Sustainability 2021, 13, 13238. https://doi.org/10.3390/su132313238
Singh R, Birajdar GS, Rashid M, Gehlot A, Akram SV, AlGhamdi AS, Alshamrani SS. Hybrid Architectural Network Implementation to Realize a Fire Evacuation Path with 2.4 GHz Zigbee and LoRa. Sustainability. 2021; 13(23):13238. https://doi.org/10.3390/su132313238
Chicago/Turabian StyleSingh, Rajesh, Gajanand S. Birajdar, Mamoon Rashid, Anita Gehlot, Shaik Vaseem Akram, Ahmed Saeed AlGhamdi, and Sultan S. Alshamrani. 2021. "Hybrid Architectural Network Implementation to Realize a Fire Evacuation Path with 2.4 GHz Zigbee and LoRa" Sustainability 13, no. 23: 13238. https://doi.org/10.3390/su132313238
APA StyleSingh, R., Birajdar, G. S., Rashid, M., Gehlot, A., Akram, S. V., AlGhamdi, A. S., & Alshamrani, S. S. (2021). Hybrid Architectural Network Implementation to Realize a Fire Evacuation Path with 2.4 GHz Zigbee and LoRa. Sustainability, 13(23), 13238. https://doi.org/10.3390/su132313238