
Driver Behavior Classification at Stop-Controlled Intersections Using Video-Based Trajectory Data


Abstract
:1. Introduction
2. Literature Review
3. Methodology
3.1. Video Data Collection and Processing
3.1.1. Video Data Collection and Trajectory Data Extraction
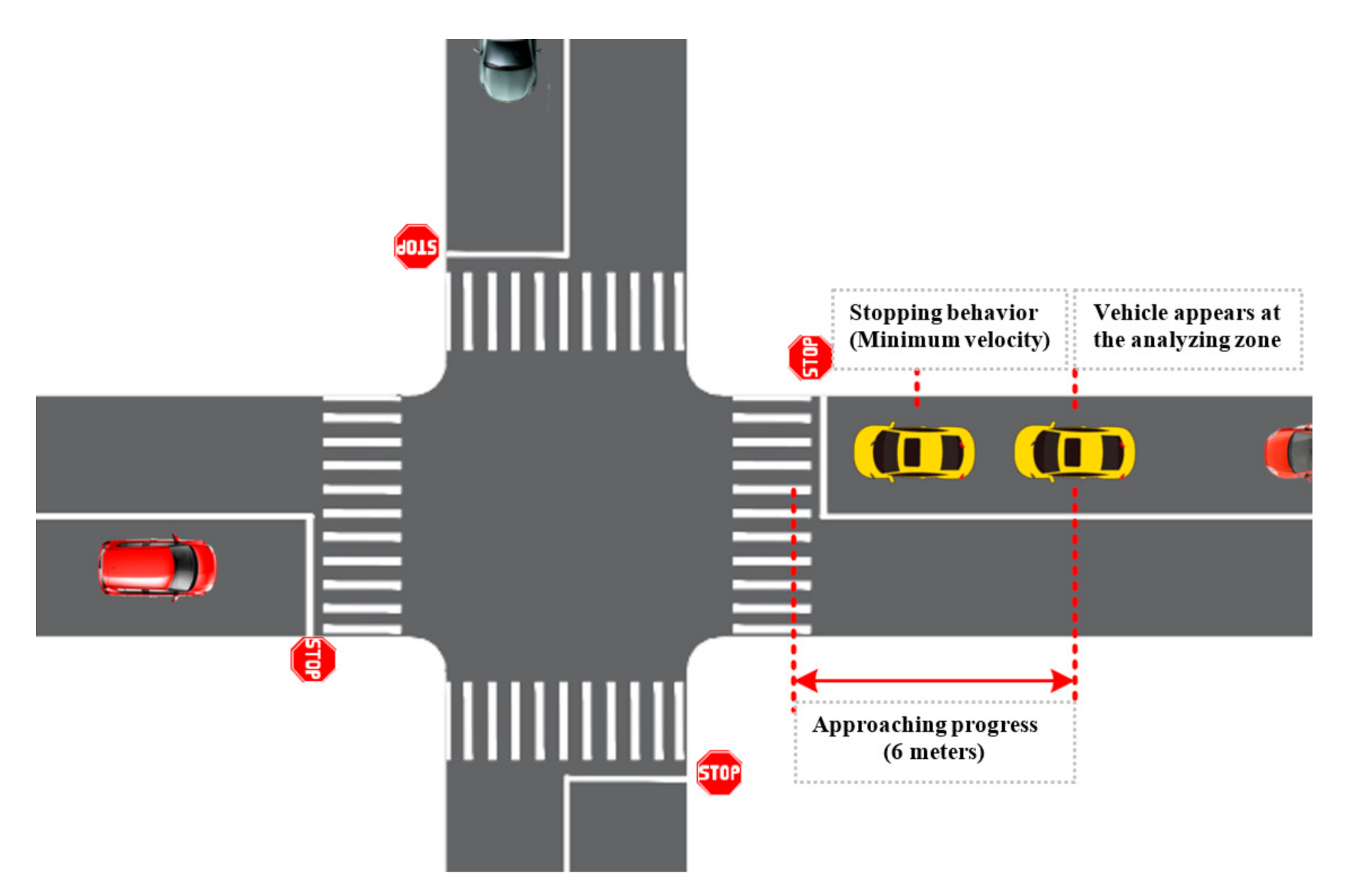
3.1.2. Vehicle Analysis Zone
3.2. Method for Investigating Vehicle Approaching Behavior
3.2.1. Behavior of Approaching Vehicles at the Instantaneous- and Progression-Level
3.2.2. Identifying and Classifying Vehicle Stopping Behaviors
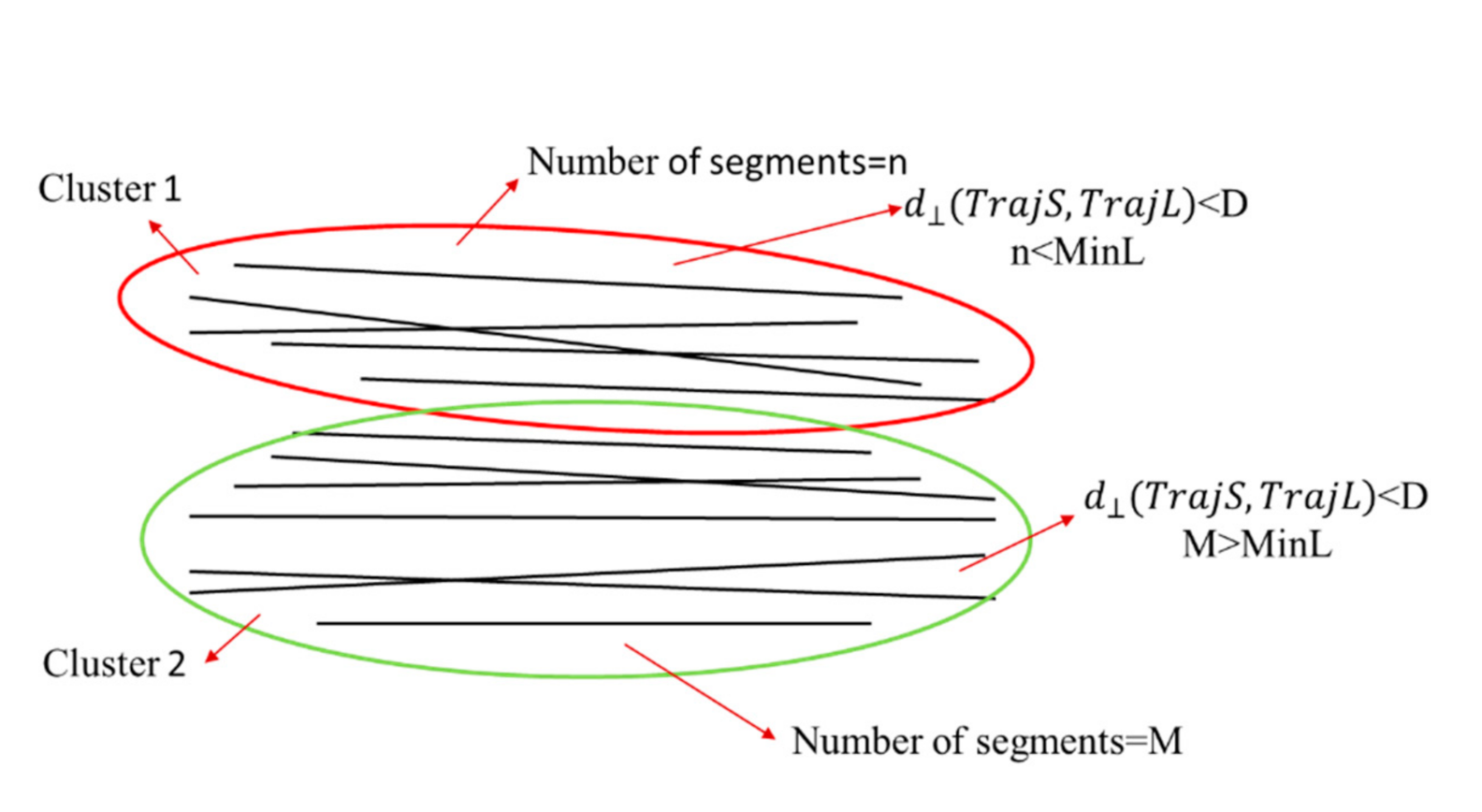
3.2.3. Identifying Vehicle Approaching Pattern
3.2.4. Analysis of Vehicle Trajectory Patterns
4. Study Sites and Data Description
5. Results and Discussions
5.1. Analysis of Vehicle Stopping Behavior
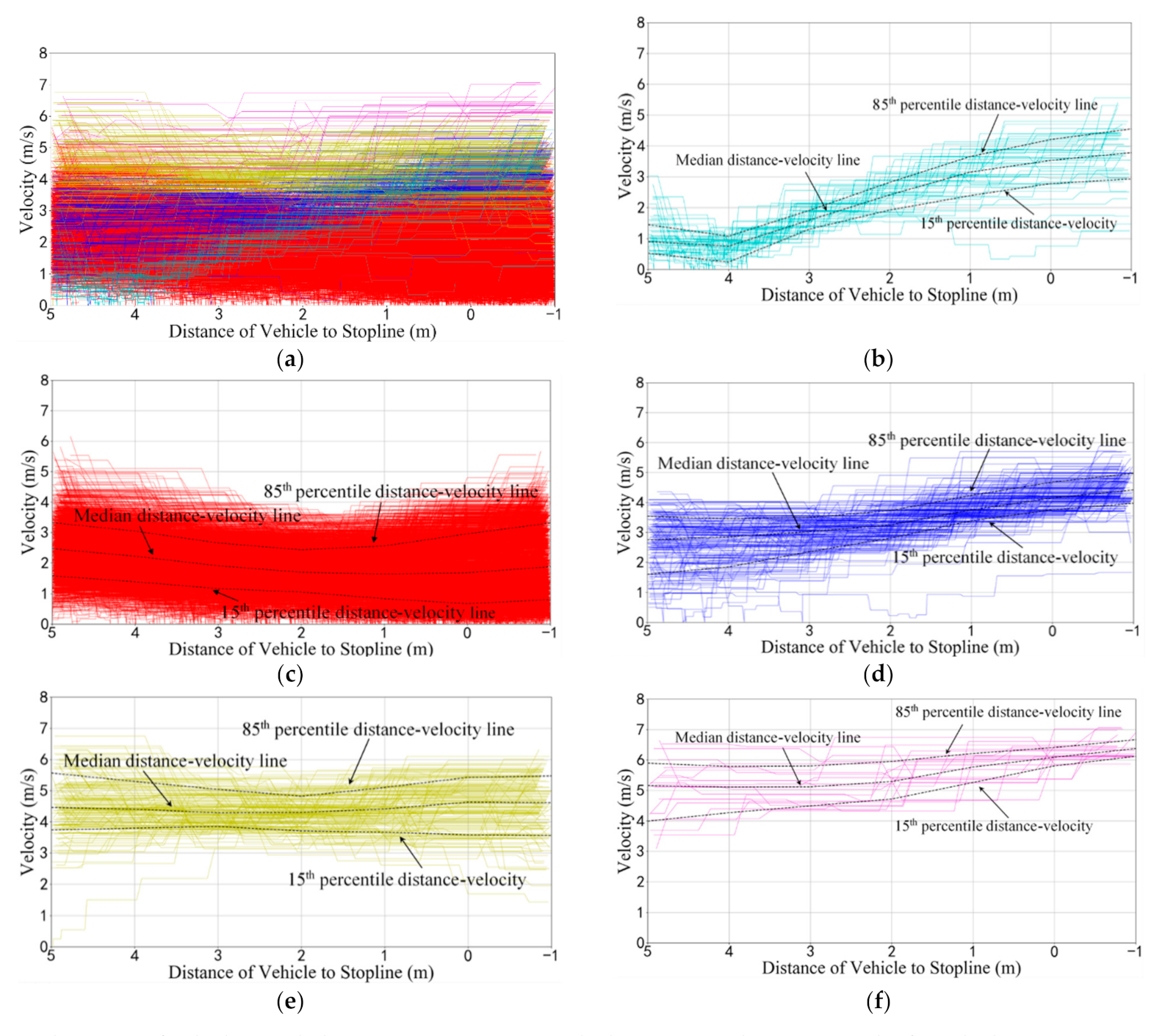
5.2. Analyzing Vehicle Approaching Pattern
5.3. Main Findings
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Retting, R.A.; Weinstein, H.B.; Solomon, M.G. Analysis of motor-vehicle crashes at stop signs in four US cities. J. Saf. Res. 2003, 34, 485–489. [Google Scholar] [CrossRef] [PubMed]
- Dingus, T.A.; Klauer, S.G.; Neale, V.L.; Petersen, A.; Lee, S.E.; Sudweeks, J.; Perez, M.A.; Hankey, J.; Ramsey, D.; Gupta, S. The 100-Car Naturalistic Driving Study, Phase II—Results of the 100-Car Field Experiment; United States Department of Transportation, National Highway Traffic Safety: Springfield, VA, USA, 2006.
- Langford, B.C.; Chen, J.; Cherry, C.R. Risky riding: Naturalistic methods comparing safety behavior from conventional bicycle riders and electric bike riders. Accid. Anal. Prev. 2015, 82, 220–226. [Google Scholar] [CrossRef] [PubMed]
- Cody, B.; Hanley, M. Stop Sign Violations Put Child Pedestrians at Risk: A National Survey of Motorist Behavior at Stop Signs in School Zones and Residential Areas; National SAFE KIDS Campaign (NSKC): Washington, DC, USA, 2003. [Google Scholar]
- Federal Highway Administration. Fatality Analysis and Reporting System (FARS); U.S. Department of Transportation: Washington, DC, USA, 2010. Available online: http://www-fars.nhtsa.dot.gov/Crashes/CrashesLocation.aspx (accessed on 7 December 2010).
- Federal Highway Administration. Traffic Safety Facts 2011: A Compilation of Motor Vehicle Crash Data from the Fatality Analysis Reporting System and the General Estimates System; USDOT: Washington DC, USA, 2013. [Google Scholar]
- Federal Highway Administration. Purpose of a Stop Sign; U.S. Department of Transportation: Washington, DC, USA, 2009. Available online: https://safety.fhwa.dot.gov/intersection/other_topics/fhwasa10005/docs/brief_4.pdf (accessed on 5 November 2009).
- Ozbay, K.; Ban, X.; Yang, C.D. Developments in connected and automated vehicles. J. Intell. Transp. Syst. 2018, 22, 187–189. [Google Scholar] [CrossRef]
- Li, T.; Kockelman, K.M. Valuing the safety benefits of connected and automated vehicle technologies. In Proceeding of the Transportation Research Board 95th Annual Meeting, Washington, DC, USA, 10–14 January 2016. [Google Scholar]
- Feng, Y.; Yu, C.; Liu, H.X. Spatiotemporal intersection control in a connected and automated vehicle environment. Transp. Res. C-Emerg. Technol. 2018, 89, 364–383. [Google Scholar] [CrossRef]
- Songchitruksa, P.; Bibeka, A.; Lin, L.I.; Zhang, Y. Incorporating Driver Behaviors into Connected and Automated Vehicle Simulation; Center for Advancing Transportation Leadership and Safety (ATLAS Center): Ann Arbor, MI, USA, 2016. [Google Scholar]
- Zhou, M.; Yu, Y.; Qu, X. Development of an efficient driving strategy for connected and automated vehicles at signalized intersections: A reinforcement learning approach. IEEE Trans. Intell. Transp. Syst. 2019, 21, 433–443. [Google Scholar] [CrossRef]
- Doerzaph, Z.R.; Neale, V.L.; Bowman, J.; Wiegand, K. Live Stop-Controlled Intersection Data Collection; Virginia Center for Transportation Innovation and Research: Charlottesville, VA, USA, 2007. [Google Scholar]
- McKelvie, S.J. An opinion survey and longitudinal study of driver behaviour at stop signs. Can. J. Behav. Sci. 1986, 18, 75. [Google Scholar] [CrossRef]
- Langton, L.; Durose, M.R. Police Behavior during Traffic and Street Stops, 2011; USA Department of Justice, Office of Justice Programs, Bureau of Justice: Washington, DC, USA, 2013.
- Woldeamanuel, M. Stopping behavior of drivers at stop-controlled intersections: Compositional and contextual analysis. J. Transp. Res. Forum 2012, 51, 109–123. [Google Scholar] [CrossRef]
- Beanland, V.; Salmon, P.M.; Filtness, A.J.; Lenné, M.G.; Stanton, N.A. To stop or not to stop: Contrasting compliant and non-compliant driver behaviour at rural rail level crossings. Accid. Anal. Prev. 2017, 108, 209–219. [Google Scholar] [CrossRef] [Green Version]
- DeVeauuse, N.; Kim, K.; Peek-Asa, C.; McArthur, D.; Kraus, J. Driver compliance with stop signs at pedestrian crosswalks on a university campus. J. Am. Coll. Health 1999, 47, 269–274. [Google Scholar] [CrossRef]
- McKelvie, S.J.; Schamer, L.A. Effects of night, passengers, and sex on driver behavior at stop signs. J. Soc. Psychol. 1988, 128, 685–690. [Google Scholar] [CrossRef]
- Shaaban, K.; Wood, J.S.; Gayah, V.V. Investigating driver behavior at minor-street stop-controlled intersections in Qatar. Transp. Res. Rec. 2017, 2663, 109–116. [Google Scholar] [CrossRef]
- Bao, S.; Boyle, L.N. Driver performance at two-way stop-controlled intersections on divided highways. Transp. Res. Rec. 2008, 2069, 26–32. [Google Scholar] [CrossRef]
- Beitel, D.; Stipancic, J.; Manaugh, K.; Miranda-Moreno, L. Assessing safety of shared space using cyclist-pedestrian interactions and automated video conflict analysis. Transp. Res. Part D Transp. Environ. 2018, 65, 710–724. [Google Scholar] [CrossRef]
- Essa, M.; Sayed, T. Traffic conflict models to evaluate the safety of signalized intersections at the cycle level. Transp. Res. C-Emerg. Technol. 2018, 89, 289–302. [Google Scholar] [CrossRef]
- Fu, T.; Miranda-Moreno, L.; Saunier, N. Pedestrian crosswalk safety at nonsignalized crossings during nighttime: Use of thermal video data and surrogate safety measures. Transp. Res. Rec. 2016, 2586, 90–99. [Google Scholar] [CrossRef]
- Kanagaraj, V.; Asaithambi, G.; Toledo, T.; Lee, T.-C. Trajectory data and flow characteristics of mixed traffic. Transp. Res. Rec. 2015, 2491, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Saunier, N.; Sayed, T. Automated road safety analysis using video data. Transp. Res. Rec. 2007, 2019, 9–10. [Google Scholar] [CrossRef]
- St-Aubin, P.; Saunier, N.; Miranda-Moreno, L. Large-scale automated proactive road safety analysis using video data. Transp. Res. C-Emerg. Technol. 2015, 58, 363–379. [Google Scholar] [CrossRef]
- Jackson, S.; Miranda-Moreno, L.F.; St-Aubin, P.; Saunier, N. Flexible, mobile video camera system and open source video analysis software for road safety and behavioral analysis. Transp. Res. Rec. 2013, 2365, 90–98. [Google Scholar] [CrossRef]
- Fu, T.; Hu, W.; Miranda-Moreno, L.; Saunier, N. Investigating secondary pedestrian-vehicle interactions at non-signalized intersections using vision-based trajectory data. Transp. Res. C-Emerg. Technol. 2019, 105, 222–240. [Google Scholar] [CrossRef]
- Fu, T.; Miranda-Moreno, L.; Saunier, N. A novel framework to evaluate pedestrian safety at non-signalized locations. Accid. Anal. Prev. 2018, 111, 23–33. [Google Scholar] [CrossRef] [PubMed]
- Elhenawy, M.; Rakha, H.A.; El-Shawarby, I. Enhanced modeling of driver stop-or-run actions at a yellow indication: Use of historical behavior and machine learning methods. Transp. Res. Rec. 2014, 2423, 24–34. [Google Scholar] [CrossRef]
- Mohamed, M.G.; Saunier, N. Behavior Analysis Using a Multilevel Motion Pattern Learning Framework. Transp. Res. Rec. 2015, 2528, 116–127. [Google Scholar] [CrossRef]
- Osman, O.A.; Hajij, M.; Karbalaieali, S.; Ishak, S. A hierarchical machine learning classification approach for secondary task identification from observed driving behavior data. Accid. Anal. Prev. 2019, 123, 274–281. [Google Scholar] [CrossRef] [PubMed]
- Qi, G.; Du, Y.; Wu, J.; Xu, M. Leveraging longitudinal driving behaviour data with data mining techniques for driving style analysis. IET Intell. Transp. Syst. 2015, 9, 792–801. [Google Scholar] [CrossRef]
- Tango, F.; Botta, M. Real-time detection system of driver distraction using machine learning. IEEE Trans. Intell. Transp. 2013, 14, 894–905. [Google Scholar] [CrossRef] [Green Version]
- Ferreira, J.; Carvalho, E.; Ferreira, B.V.; de Souza, C.; Suhara, Y.; Pentland, A.; Pessin, G. Driver behavior profiling: An investigation with different smartphone sensors and machine learning. PLoS ONE 2017, 12, e0174959. [Google Scholar] [CrossRef]
- Lu, B.; Ni, S.; Washburn, S.S. A support vector regression approach for investigating multianticipative driving behavior. Math. Probl. Eng. 2015, 2015, 701926. [Google Scholar] [CrossRef] [Green Version]
- Ping, P.; Qin, W.; Xu, Y.; Miyajima, C.; Takeda, K. Impact of driver behavior on fuel consumption: Classification, evaluation and prediction using machine learning. IEEE Access 2019, 7, 78515–78532. [Google Scholar] [CrossRef]
- Aoude, G.S.; Desaraju, V.R.; Stephens, L.H.; How, J.P. Behavior Classification Algorithms at Intersections and Validation using Naturalistic Data. In Proceeding of the 2011 IEEE Intelligent Vehicles Symposium, Baden-Baden, Germany, 5–9 June 2011; pp. 601–606. [Google Scholar] [CrossRef] [Green Version]
- St-Aubin, P. Driver Behaviour and Road Safety Analysis Using Computer Vision and Applications in Roundabout Safety. Ph.D. Thesis, Ecole Polytechnique, Montreal, QC, Canada, 2016. [Google Scholar]
- Berndt, H.; Wender, S.; Dietmayer, K. Driver braking behavior during intersection approaches and implications for warning strategies for driver assistant systems. In Proceeding of the 2007 IEEE Intelligent Vehicles Symposium, Istanbul, Turkey, 13–15 June 2007; pp. 245–251. [Google Scholar] [CrossRef]
- MTHToha; FORWARD. Average Car Length–List of Car Lengths in Details. Available online: https://anewwayforward.org/average-car-length (accessed on 15 October 2020).
- Patil, R.; Khan, A. Bisecting K-means for clustering web log data. Int. J. Comput. 2015, 116, 36–41. [Google Scholar] [CrossRef]
- Banerjee, S.; Choudhary, A.; Pal, S. Empirical Evaluation of K-Means, Bisecting K-Means, Fuzzy C-Means and Genetic K-Means Clustering Algorithms. In Proceeding of the 2015 IEEE International Wie Conference on Electrical and Computer Engineering, Dhaka, Bangladesh, 19–20 December 2015; pp. 168–172. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.-P.; Sander, J.; Xu, X. A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise; AAAI: Palo Alto, CA, USA, 1996; pp. 226–231. [Google Scholar]
- Birant, D.; Kut, A. ST-DBSCAN: An algorithm for clustering spatial–temporal data. Date Knowl. Eng. 2007, 60, 208–221. [Google Scholar] [CrossRef]
- Lee, J.-G.; Han, J.; Whang, K.-Y. Trajectory clustering: A partition-and-group framework. In Proceedings of the 2007 ACM SIGMOD International Conference on Management of Data, New York, NY, USA, 12–14 June 2007; pp. 593–604. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 Groups | 2 Groups | 3 Groups | 4 Groups | 5 Groups |
|---|---|---|---|---|
| no full stop | rolling stop | slight rolling stop | slight rolling stop | slight rolling stop |
| − | running through | rolling stop | rolling stop | rolling stop |
| − | − | running through | slow down without stop | slow down without stop |
| − | − | − | running through | running through |
| − | − | − | − | aggressive running through |
| Site ID | Site Name | Date | Duration (Hour) | Camera View |
|---|---|---|---|---|
| S-1 | Guizot–Henri Julien | 14 July 2014 | 8 |  |
| S-2 | Fleury–Millen | 12 August 2015 | 2.2 |  |
| S-3 | St Georges–Notre Dame | 8 June 2017 | 6.2 |  |
| S-4 | Dutrisac–duRuisseau | 7 November 2016 | 5.5 |  |
| S-5 | 13e–Belair | 21 June 2015 | 4.5 |  |
| Clustering Result | Approach Speed at Stop Sign (m/s) | Number of Observations | ||||
|---|---|---|---|---|---|---|
| Minimum | Maximum | Median | 25th Percentile | 75th Percentile | ||
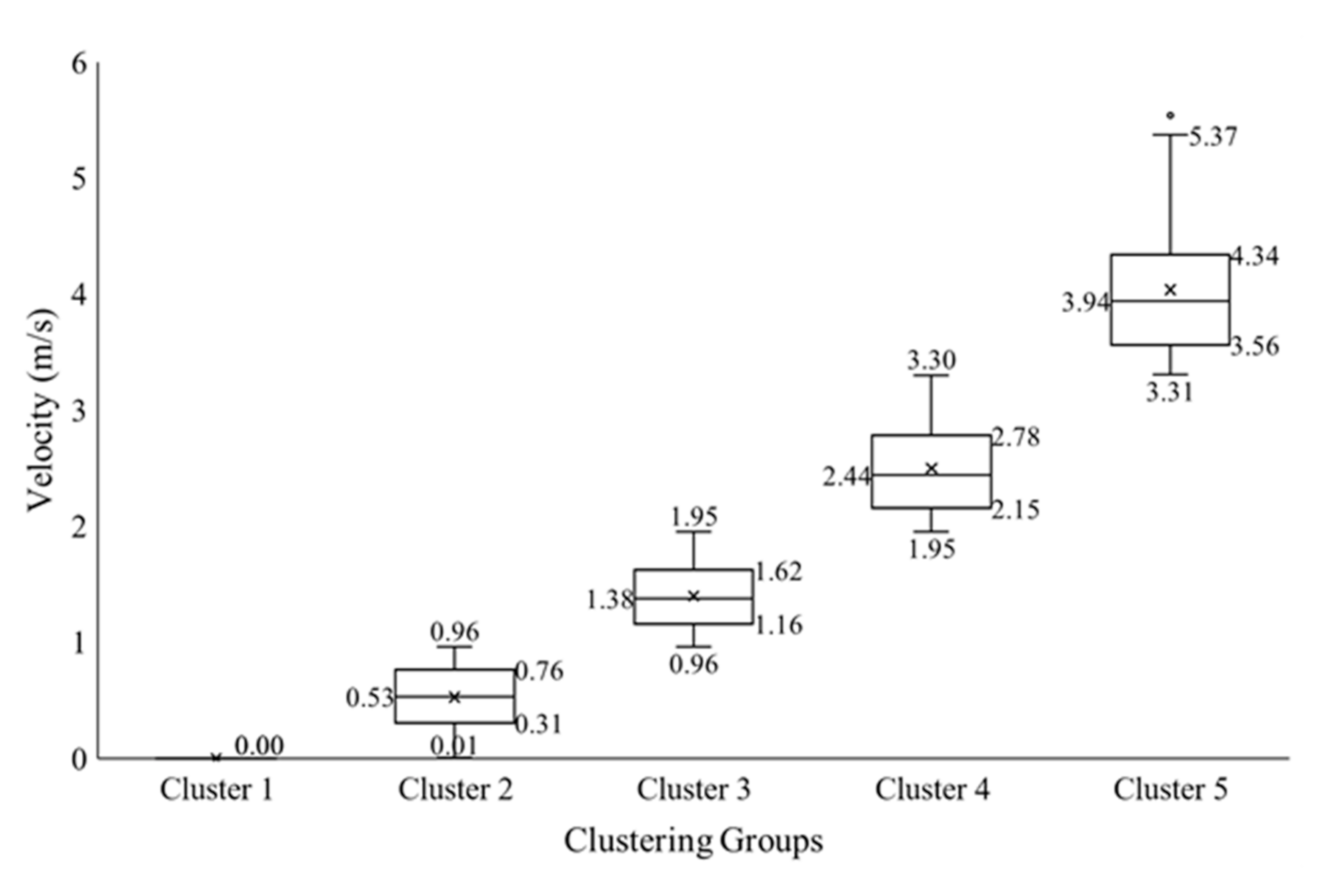
| Cluster 1 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 313 |
| Cluster 2 | 0.01 | 0.96 | 0.53 | 0.31 | 0.76 | 1078 |
| Cluster 3 | 0.96 | 1.95 | 1.38 | 1.16 | 1.62 | 957 |
| Cluster 4 | 1.95 | 3.30 | 2.44 | 2.15 | 2.78 | 398 |
| Cluster 5 | 3.31 | 5.37 | 3.94 | 3.56 | 4.34 | 163 |
| Type | Number | Percentage | Median Speed (m/s) | 15th Percentile Speed (m/s) | 85th Percentile Speed (m/s) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Mean | Minimum | Maximum | Mean | Minimum | Maximum | Mean | Minimum | Maximum | |||
| 1 | 45 | 1.56% | 2.30 | 0.75 | 3.78 | 1.73 | 0.24 | 2.93 | 2.81 | 1.07 | 4.55 |
| 2 | 2503 | 86.52% | 1.93 | 1.64 | 2.47 | 1.07 | 0.67 | 1.58 | 2.90 | 2.43 | 3.33 |
| 3 | 163 | 5.63% | 3.46 | 2.75 | 4.42 | 2.82 | 1.60 | 3.97 | 4.01 | 3.45 | 4.97 |
| 4 | 162 | 5.60% | 4.44 | 4.29 | 4.63 | 3.70 | 3.56 | 3.85 | 5.24 | 4.82 | 5.57 |
| 5 | 20 | 0.69% | 5.56 | 5.11 | 6.38 | 4.95 | 3.99 | 6.12 | 6.10 | 5.79 | 6.67 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wen, X.; Fu, L.; Fu, T.; Keung, J.; Zhong, M. Driver Behavior Classification at Stop-Controlled Intersections Using Video-Based Trajectory Data. Sustainability 2021, 13, 1404. https://doi.org/10.3390/su13031404
Wen X, Fu L, Fu T, Keung J, Zhong M. Driver Behavior Classification at Stop-Controlled Intersections Using Video-Based Trajectory Data. Sustainability. 2021; 13(3):1404. https://doi.org/10.3390/su13031404
Chicago/Turabian StyleWen, Xiamei, Liping Fu, Ting Fu, Jessica Keung, and Ming Zhong. 2021. "Driver Behavior Classification at Stop-Controlled Intersections Using Video-Based Trajectory Data" Sustainability 13, no. 3: 1404. https://doi.org/10.3390/su13031404
APA StyleWen, X., Fu, L., Fu, T., Keung, J., & Zhong, M. (2021). Driver Behavior Classification at Stop-Controlled Intersections Using Video-Based Trajectory Data. Sustainability, 13(3), 1404. https://doi.org/10.3390/su13031404