1. Introduction
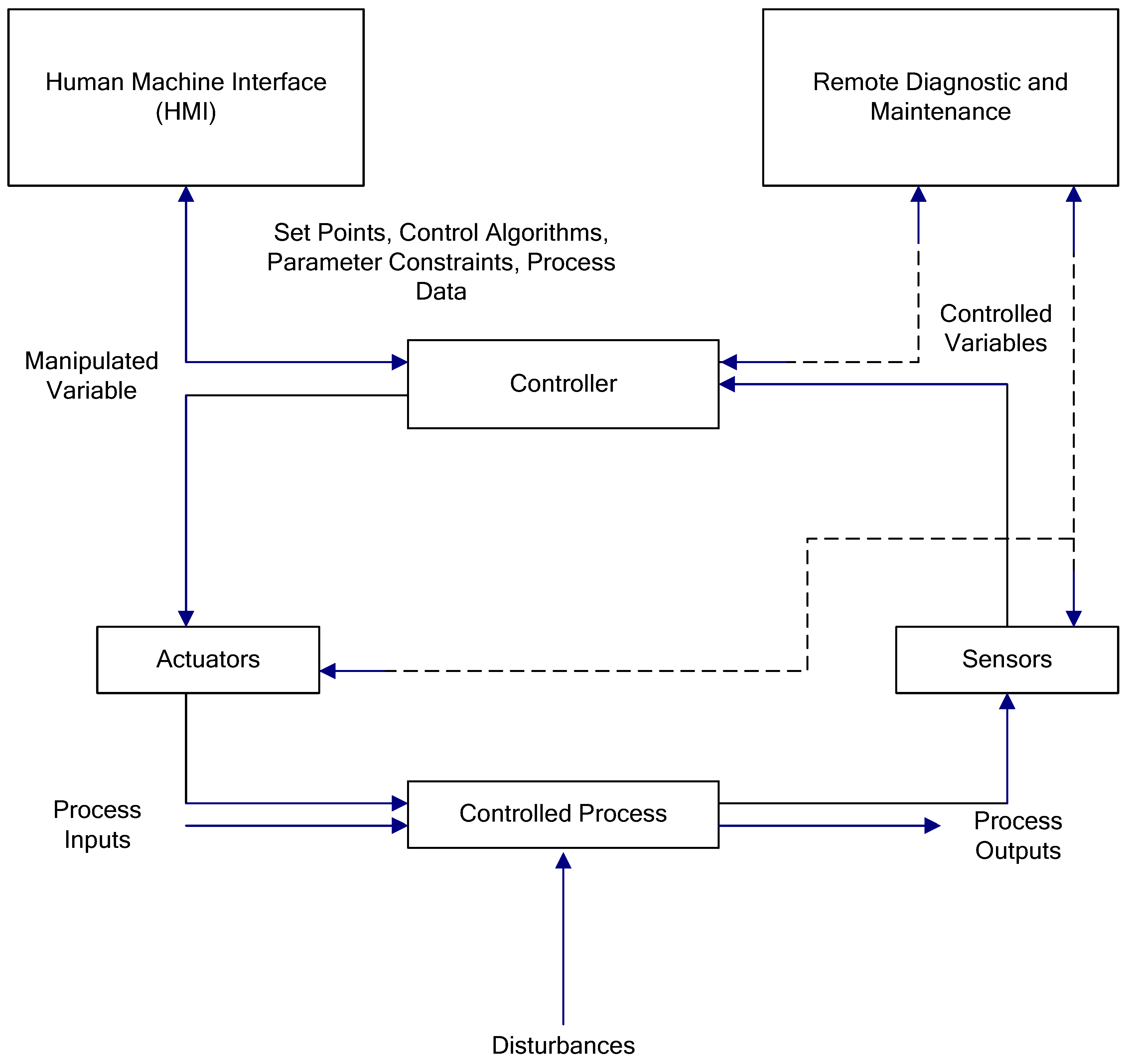
A networked control system (NCS) consists of control loops connected through communication networks, in which both the control signal and the feedback signal are exchanged between the system/plant and the controller. There are two types of approaches for design of NCSs, namely control of network approach and control over network approach. Only the control over network approach-based NCSs are considered in this review. A simple block diagram of this type of networked system is shown in
Figure 1.
In an NCS, the plant output is measured using the sensors. These signals are converted into digital signals using the analog-digital (A/D) convertors, which are transmitted to the controller via a communication network. The controller determines the control signal based on the sensor output, which is transmitted back to the plant using same communication channel. The control signal before being fed to the actuator section of the plant, is converted from digital to analog signal using the digital-analog (D/A) convertor. In this manner, the plant dynamics can be controlled from a remote location.
1.1. Advantages and Disadvantages of NCS
There are several underlying advantages of an NCS, which is termed as the next generation control system. Key merits of networked control systems (NCSs) are as follows:
- (i)
Effective reduction of system complexity: It is possible to minimize the complexity of control systems by interfacing them with the communication network. With the communication network, the data related to multiple plants can be easily stored at a single server which reduces the complexity of control systems.
- (ii)
Efficient sharing of network data: Several parameters pertaining to the plant can be exchanged easily using the communication networks, which helps in the design of control algorithms.
- (iii)
Simple to take intellectual decisions based on the information: The information can be used to make intelligent decisions easily.
- (iv)
Eliminates unnecessary wiring: Today, it is possible to transmit data wirelessly at a very high speed. The wiring for interfacing controllers and plants can also be avoided. The wireless sensor networks are advanced enough to make the wireless control is a reality.
- (v)
Simple to scale the networks by adding additional sensors, actuators, and controller: The wireless sensors and actuators can be replaced easily, which reduces the maintenance cost of the NCS. The controllers can also be replaced economically as compared to the traditional wired controllers. The expansion of sensors, actuators and controllers can also be achieved easily.
- (vi)
Cyber-physical interface for tele-execution of control: The NCS provides a platform for cyber-physical interface and tele-execution of controls. The NCS permits the remote control of the plant.
- (vii)
Wide range of applications: Applications in the area of distributed power systems, robots, unmanned aerial vehicles (UAVs), automobiles, space discovery, terrestrial discovery, industrial unit automation, remote problem-solving and troubleshooting, perilous environments, aircraft, production plant monitoring, and many more. More and more applications of NCS are coming into existence every day.
The NCS is also plagued by several problems. The disadvantages of NCS are:
- (i.)
Loss of ability to determine the time of incoming data: The time at which the data arrives cannot be determined exactly, so uniform sampling cannot be used.
- (ii.)
Loss of data integrity: Data may be lost during the transmission process, so it cannot give the complete information.
- (iii.)
Communication Latency: In remotely located NCSs, due to the communication latency, the control action may not be implemented with immediate effect.
- (iv.)
Complexity and Congestion: As the number of nodes increases, so does the complexity of the communication system, causing congestion and time delays. Therefore, the deployment in an industry with tens of thousands of sensors and actuators can be a challenging task.
1.2. Designing of Control System from Continuous Domain to Networked Control Domain
In the beginning, control signals were generated using analog computers. Frequency analysis and Laplace transform were the primary tools for analysis. The main drawbacks of this system are its limited accuracy, limited bandwidth, drift, noise, and limited capabilities to manage nonlinearities. Known delays could be handled at the time of control synthesis using the well-known Smith predictor.
Digital controllers replaced the analog technology with the advancement of processors. However, controlling an analog plant with a discrete electronic system inevitably introduces timing distortions. In particular, it will become necessary to sample and convert the sensor measurements to digital data and also convert them back to analog values. Sampling theory and z transform became the standard tools for the design and analysis of digital control systems analysis. For z transform, it is assumed that the sampling is uniform. Thus, for the design of digital controllers, periodic sampling became the standard. Note that, at the infancy of digital controls, as the computing power was poor and memory was expensive, it was vital to minimize the complexity of the controllers and the operating power. It is not obvious that the periodic sampling assumption is always the best choice. For example, adaptive sampling has been used in Reference [
1], where the sampling frequency is changed based on the derivative of the error signal, and is far better than equidistant sampling in terms of computed samples (but possibly not in terms of disturbance rejection [
2]). A summary of these efforts is provided in References [
3,
4]. However, with the decreasing computational costs, interest in adaptive sampling reduced, and the linearity preservation property of equidistant sampling has helped it to stay the undisputed standard.
From the computing side, real-time scheduling modeling and analysis were introduced in Reference [
5]. This scheduling was based on restrictive assumptions, one of them being the periodicity of the tasks. Even if more assumptions were progressively introduced to cope with the practical problems, the periodicity presumption remains popular [
6]. Moreover, the topology of the network can vary with time, allowing the mobility of the control devices. Hence, the whole control system can be highly adaptive in a dynamic environment. In particular, wireless communications allow for the rapid deployment of networks for connecting remotely located devices. However, networking also has problems, such as variable delays, message de-sequencing, and periodic data loss. These timing uncertainties and disturbances are in addition to the problems introduced by the digital controllers.
Figure 2 shows the trade-off between control performance and the sampling rate.
Figure 2 shows that the control performance is only applicable for a range of sampling rate from
PB to
PC. Increasing the sampling rate above
PC increases the network-induced delays. This will result in the degradation of control performance.
Based on the above discussion, the difference between the conventional control systems and the NCS is been summarized in
Table 1 as:
1.3. Co-Design Approach for the NCSs
The design of an NCS integrates the domains of control system, communication, and real-time computing. The increasing complexity of the computer systems, and their networks, requires advanced methods specifically suited for the NCS. The main issue to be addressed is the achievement of the control objective (i.e., a combination of security, performance, and reliability requirements), despite the disturbances. For instance, sharing of common computing resources and communication bandwidths by competing control loops, alongside the other functions, introduces random delays and data losses. Moreover, the use of heterogeneous computers and communication systems increases the complexity of the NCS.
Control plays a significant role in interconnected complex systems for their reliable performance [
7]. The interconnection of elements and sub-systems, coming from different technologies, and which are subject to various constraints, calls for a design that can solve the conflicting constraints. Besides achieving the desired performance in normal situations, the reliability and safety-related problems are of concern for the system developers. A fundamental concept that is dependability, which is the device property that features various attributes, such as access, reliability, safety, confidentiality, integrity, and maintainability [
8]. Being confronted with faults, errors, and failures, a system’s dependability could be achieved in numerous ways, i.e., fault prevention, fault threshold, and fault forecasting [
9].
Except in the event of failures due to hardware or software components, most procedures run with nominal behavior, but, neither the process nor the execution resource parameters are completely known or modeled. One method is to allocate the system resources conservatively, which results in the wastage of resources. From the control viewpoint, specific inadequacies to be considered include poor timing, delays, and data loss. Control usually deals with modeling uncertainty, powerful adaptation, and disturbance attenuation. More correctly, as shown with recent results obtained on NCS [
10], control loops tend to be robust and can tolerate networking and computing disturbances, up to a certain level. Therefore, the timing deviations, such as jitter or data loss, as long as they remain within the bounds, may be viewed as the nominal features of the system, but not as exceptions. Robustness allows for provisioning the execution resources according to needs that are average than for worst cases, and to take into account system reconfiguration only once the failures surpass the abilities of the controller tolerance that is running.
An NCS is composed of a collection of heterogeneous devices and information sub-systems. For designing the NCS, many conflicting constraints must be simultaneously fixed before reaching a satisfactory solution that is implementable. Issues related to networking control tracking performance, robustness, redundancy, reconfigurability, energy consumption, expense effectiveness, etc., are to be addressed. Traditional control usually deals with a procedure that requires a solitary computer, and the limitations of the communication links and computing resources usually do not notably affect its performance. Existing tools dealing with the modeling and identification, robust control, fault diagnosis and isolation, fault tolerant control, and flexible real-time scheduling need to be enhanced, adapted, and extended to handle the networked characteristics of the control system. Finally, the thought of a co-design system approach has emerged that allows the integration of control, as well as communication within the NCS design [
10].
1.4. Main Contributions
The NCS is an emerging area of the control system. It is worth reviewing the state-of-the-art developments in NCS. Although many review papers have been published in this area, to the best of the authors’ knowledge, these focused only on a certain dimension of the NCS, and a comprehensive approach was lacking. In this paper, a comprehensive review on the evolution of NCSs in last the 30 years is discussed. The evolution of NCS is broadly divided in three phases as: (i) prior to 2000, (ii) 2001–2010, and (iii) 2011 onwards. The reason for this division is to understand the initial, the intermediate, and the latest developments related to NCS. The main focus of this discussion would be on the advancement of different control techniques during these phases. Based on the extensive review, the different types of NCSs and their related challenges are described. At the end, this review paper highlights the following innovations in the field of NCS: new novel methods for selecting the best sampling time in the NCS, new jitter compensation techniques, developing the theory and practice for control systems operating in a distributed and asynchronous packet-based environment, stability analysis of networked control systems in the presence of network-induced delays and packet dropouts (due to propagation delay and also due to the network congestion), and developing of advanced networked control methods that provide the desired performance in the presence of uncertainties and adversaries. This review paper also highlights some important practical applications that are implemented using the NCSs. Lastly, the important future research areas for NCSs are discussed.
The remaining sections are as follows:
Section 2 reviews the development of NCS prior to 2000 AD; The development of NCS from 2001 AD to 2010 AD is discussed in
Section 3; The advancement of NCS in recent phase after 2011 AD is discussed in
Section 4;
Section 5 describes about different topologies of NCSs;
Section 6 presents different types of NCSs and their related challenges;
Section 7 discusses some of the vital practical applications of the NCSs;
Section 8 is the conclusion, along with the observations and potential future developments.
2. Initial Phase of NCS Prior to 2000
The NCS concept is not a recent phenomenon. It emerged in the early 1970s, with the progress of computation, as well as communication, technologies. However, the computation and communication technologies were still in the nascent stages and so the NCSs were designed as decentralized control systems, which remained prominent for the next three decades. One of the earliest works on decentralized NCS was proposed by Reference [
11], where algebraic and geometric methods were discussed to obtain stable results. A dual-mode decentralized scheme for the networked control of a commodity’s flow has been presented in Reference [
12]. First, local controllers located at network nodes, exchange simple messages with their neighbors to determine the confined optimum flows. Second, the local controllers adjust their flows to reach the optimal equilibrium state in finite time.
The stabilization of the decentralized linear time-invariant multivariable (LTI-MultiVar) system was proposed in Reference [
13] by employing numerous local feedback control rules. A necessary and sufficient condition was obtained from the above rule for the stabilization of the given system. Later, in Reference [
14], the properties of the closed loop were studied for both controllable and observable
k-channel linear systems, by applying the consequences of decentralized feedback. In addition, the theory of a complete system was established. Complete systems can be made both controllable and observable for all channels by applying non-dynamic decentralized feedback.
Some development in the field of decentralized control was achieved in 1980s. In Reference [
15], a new dynamic interaction measure was defined by using the perception of structured singular value (SSV) for multivariable systems under feedback. To predict the stability of the decentralized systems and to measure the loss of performance, dynamic interaction measure was used. Later, in Reference [
16], F. Lin et al. presented several important studies on decentralized control systems. The decentralized regulation and synchronization for partially surveyed discrete-time-event systems was studied. In Reference [
17], which was illustrated using a simple production system. This study was later extended in Reference [
18], and it was concluded that decentralized supervision would be easier to design and use.
In the 1990s, several NCS-related ideas evolved based on the concepts developed in the recent years, such as smart networks for control, decentralized control of complex systems, supervisory control, control in multimedia wireless networks, quasi-decentralized control, scheduling, event-triggered control, stability analysis, and so on [
19,
20,
21,
22,
23,
24,
25,
26,
27,
28,
29,
30,
31].
The decentralized control of systems, which is complex in nature, were described in Reference [
19], wherein topics, such as stabilization, optimization, estimation and control, output control, decompositions, and reliable control, were discussed in detail. In Reference [
20], the author discussed the role of distributed, as well as centralized, networks for control. The authors also differentiated the above two categories in different ways. It also discussed the benefits and drawbacks of data networks, as well as the control networks. In a discrete-time system [
21], the events must be within the imposed time constraints. To achieve a given control objective, a controller can hinder, permit, or pressurize several events in the system. In Reference [
22], the network-level management and control issues were discussed. The quasi-decentralized control for complex systems was analyzed in Reference [
23] using the concept of power system stabilization to design a sample system.
Three types of data: periodic data, sporadic data, and messages, have been proposed in Reference [
24] for the planning of the NCS. As a basic parameter, delay bound was used, which guarantees the stability of the given system using Lyapunov’s theorem. The above method can adjust the sampling period to be as minimum as possible, allocating all the network bandwidth. The basic properties of real time distributed systems were compared in Reference [
25]. In addition, the characteristics of time triggered and event-triggered distributed systems in robotics were discussed in References [
26,
27] using the artificial intelligence, particularly focusing on the predictability, resource utilization, extensibility, etc. In Reference [
28], the authors achieved the asymptotic stability and improved controller performance by scheduling the use of the network.
At the end of 20th century, a basic controller called an event-based proportional–integral–derivative (PID) controller was described in Reference [
29], decreasing the resource consumption, only with the deprivation in the performance of trivial control. The proposed work was validated with simulations on a double-tank process. Next, two types of algorithms were suggested in Reference [
30] for approximating the plant operation: one was an open-loop arrangement analyst, and the other was a closed-loop arrangement analyst/predictor. Again, the NCS’s stability was analyzed in Reference [
31], showing the effects of sampling rate manipulation and network delay on the system stability.
The above historical developments are summarized in tabular form in
Table 2 on the basis of area/network/parameter.
Table 2 shows the distribution of available papers in the different areas prior to year 2000: on decentralized-based networks, there are around 10 papers; on smart network-based systems, there are around 9 papers (during this period, the smart networks are in development stage); stable and robust networks can be found in all types of networks. The table here describes about the evolution of networked systems from decentralization of the available conventional networks. As there are many shortcomings in decentralized systems, the evolution of smart/wireless networks/discreet event-based networks came into existence. The distribution of the papers prior to 2000 is shown in
Figure 3. The majority of the works are related to decentralized networks, followed by smart networks, and only a small percentage of works dealt with stable/robust networks.
3. Development of NCS between 2001 to 2010
During this period, the key concepts of NCS, which were proposed earlier, received more attention, and the volume of research increased tremendously. One of the main themes of this period was the controller design for NCS with stability analysis and time delay. An important work on scheduling method for NCS was proposed by Reference [
32]. This method guaranteed the stability using Lyapunov method. Next, a work on the impact of modern networked architecture on control act of NCS was published by Reference [
33]. In Reference [
34], the procedures for selecting the message recognizers for vigorously scheduled networked systems were proposed and validated. In Reference [
35], recital benefits were established by dispensing with queues and by vigorous traffic scheduling on the network.
An uncomplicated and easy model of a network system was proposed in Reference [
36], in which local controllers connected by a network was addressed. In Reference [
37], it was discussed that any complex self-motivated communications network typically has several layers and executive units and would be at risk of several disturbances. Therefore, the requirement for efficient and intelligent control of the systems must be used [
38]. In Reference [
39], an original networked control protocol, called try once-discard, has been proposed for multiple-input and multiple-output (MIMO) NCSs.
A style technique of memoryless-quantizers in sampled-data models was planned by Reference [
40]. The objective was quadratic stability within the continuous time (CT) domain. In Reference [
41] a general framework for the NCSs was given, where all elements were assumed to be connected through a communication network. They used the uncertainty threshold principle to point out that, with the bound conditions, even in an undisturbed NCS there would be data rates that degrade the performance of networked control due to the network induced delays and can lead the system to the instability [
42].
In Reference [
43], web-based multi-rate control systems were presented. It was suggested that the effect of web time delay on the control performance can be reduced by using the time delay compensation. A novel networked control strategy developed by Reference [
44], analyzes the soundness of the networked systems with unsystematic delay in the communication. It consisted of a network control predictor and a traditional controller. The soundness criteria of a networked system were analytically derived for random communication delays. In Reference [
45] a state observer for the networked systems with a delay in the time period was designed. Authors claimed that the state observer supported the satisfactory performance of the NCS, even with delay in the time period. Another review paper [
46], which appeared within the same year, was centered on network-induced delays, sampling amount, jitter, information packet dropout, network programming, and stability of Ss.
In Reference [
47], authors studied the result of a network within the feedback circuit of an NCS. A random packet-loss model for the network was considered. A classical work on the design of robust H-infinity (H∞) controllers for NCSs with uncertainties was given by Reference [
48] that additionally considered the network-induced delay and information dropout. Next, the delays due to the sensor-to-controller and to-actuator were sculptured as two Markov/stochastic chains in Reference [
49]. Input/output delay approach was considered by Reference [
50] to style the strong sampled-data strong control. Enough LMI conditions were obtained by Lyapunov–Krasovskii functionals. In Reference [
51], the straight line stability and straight line persistent disturbance attenuation problems were investigated for NCSs under the effects of random access delays and packet dropout. A robust controller was designed in Reference [
52] for the NCSs with random time-delays, using the linear matrix inequality (LMI). The performance analysis of the event-triggered control for the detector sampling in a NCS was carried out by Reference [
53]. The analytical formula for analyzing the mean and, therefore, the rate of event-driven traffic versus the sampling resolution was obtained. The simulation results in support of the obtained formula were additionally discussed.
A fault detection technique for NCSs supporting the parity relation and Principal Component Analysis (PCA) was projected in Reference [
54]. The projected methodology noticed an honest decoupling from the unknown and random network-induced delay. In Reference [
55] a fault bearing control methodology for the nonlinear NCSs with communication constraints was given. In Reference [
56], the Tagaki-Sugeno (T-S) model was utilized to design a networked system with completely different delays induced by the network. When analyzed with the existing system modeling methods, this approach does not need the data of the actual delays induced by the network. The work in Reference [
57] focused on the networked system with random time delays and, additionally, bestowed a brand new modeling methodology for the linear and nonlinear NCS with time delays that are random in nature and named those models as similar T-S fuzzy models.
A system supported bionic principles was introduced by Reference [
58] to demonstrate the information obtained from an oversized range of numerous sensors. By means of that structure symbolization, the quantity of data to be processed was considerably reduced. In Reference [
59] the event-triggered control was revisited, from an input-to-output perspective. Review of many modern results on evaluation, investigation, and controller synthesis for networked systems were administered in Reference [
60]. Another paper, by Reference [
10], surveyed appropriate work from the areas of systems and process control, detection, and estimation. Input delay approach, during which the sample-and-hold circuit can be implanted into an analog system with an input delay which is time-varying, was revised in Reference [
61]. The loss of data-packets in the NCSs was mentioned in Reference [
62]. In Reference [
63], a mathematical model of a small rotorcraft was presented. The identification methodology and state estimation using Extended Kalman Filter were discussed. Control algorithms, based on PI, LQG and SDRE approaches, focused on rotorcraft were also proposed.
In Reference [
64], the impact of a network within the electrical circuit of a system was discussed. They used an unsystematic loss of data-packet model for the network, and showed the results for discrete-time period systems with stochastic process jumping constraints. In Reference [
65] the exponential stability of Nonlinear Time Varying (NLTV) impulsive systems was established with the help of Lyapunov functions separated at the impulse times. In Reference [
66], it was observed that for NCSs with delays and output feedback stabilization, there was a deviation in the mean-square stability due to the random communication situations. In Reference [
67], a state feedback controller was proposed for the stabilization of an uncertain linear networked control systems with random communication time delays, which differs from the Lyapunov–Razumikh methodology. In Reference [
68], a sufficient condition was obtained for the exponential stability of the networked systems, and they also the mentioned relationship between the dropout rate of the data-packets. An occurrence-based discrete-time model (an exponential unsure system with delay) was proposed by Reference [
69] that showed that the stability of the projected system can be achieved by finding an effect for a switched stochastic system with an additive norm delimited uncertainty.
In Reference [
70], the state feedback controllers were considered for a closed-loop NCS that is represented as a delay in switched systems. A technical note involved with the stabilization drawback of NCS was revealed by Reference [
71]. In Reference [
72], compensation ways were studied, within the structure of NCS, while considering the protocol characteristics. A general framework was projected initially, wherever the zero-order hold had the logical capability of selecting the most recent control input packet. A category of period of time control systems during which every control task triggers its next unleash supported the worth of the last sampled state were examined by Reference [
73]. In Reference [
74], a memory less quantizer for steadying a single-input discrete-time Linear Time Invariant (LTI) system with random loss in data-packets, was proposed within the sense of unsystematic quadratic stability. Nesic et al. [
75] generalized and unified a variety of recent developments in the literature pertaining to quantized control systems (QCS) and NCS. They provided a unified framework for the controller style with division and time planning via an emulation-like approach. Improved stability conditions were derived in Reference [
76] for sampled-data feedback control systems with falteringly Linear Time Variant (LTV) sampling intervals. The cause of robust
H∞ control was researched by Reference [
77] for sampled-data systems with probabilistic sampling. By Linear Matrix Inequality (LMI) approach, enough situations were produced, that bonded the robust mean-square exponential stability of the system.
An event-driven state-feedback type of control technique in which a control input generator mimicked a continuous feedback between two successive event times was published by Reference [
78]. In Reference [
79], focus was given on different factors, such as networking technology, delay network induced delay, resource allocation of networks, scheduling, fault bearing capacity, etc. In Reference [
80], an original totally time period dependent Lyapunov function was proposed in the construction of the input delay that improves the existing results. In Reference [
81], the cause of the NCSs having exponential stability with the increase in delay time-periods, was studied. The cause of robust fault calculation for a class of tentative networked systems with arbitrary communication delays induced by the network was inspected by Reference [
82], which also described the delays by Markov processes. In Reference [
83], wireless sensor networks for networked manufacturing systems were proposed.
The above historical development is summarized in tabular form in
Table 3 on the basis of area/network/parameter as follows.
The above,
Table 3, gives a structured information about the distribution of papers in different areas published during the phase from 2001 to 2010. On scheduled networks, there are around 6 papers; on stability analysis-based systems, there are around 15 papers; on complex and interactive networks, there are around 5 papers; on communication and event-based networks there are around 4 papers, etc. Event-based approach was still in the developmental phase as it was a new technique. Delay-based systems were popular during this stage that were used to overcome the drawbacks of the research prior to year 2000. So, scheduled, autonomous, event-based, and communication-based approaches came into existence during this phase. The major drawbacks prior to year 2000 were: security issues, effect of delay on networked systems, effect of packet dropouts in communication networks, etc. So, to overcome these issues, scheduled approach-based network came into existence. The distribution of the papers during this phase are shown in
Figure 4. The major focus was on delay-based approaches in networked system to improve the flow of information in networked system and make the system stable.
4. Development of NCS from 2011 Onwards
In the last decade, highly developed control methods were employed for improving the performance of NCS in terms of system stability, delays, event-triggering algorithms, network security, etc. In addition, the discrete time NCSs have received a considerable amount of attention.
Model-based predictive NCSs (MBPNCSs) were proposed by Reference [
84] that compensated for the random delays and for the data losses in data transmission. The performance of the system was improved with the help of a predictive control scheme. In Reference [
85], an approach for stabilization via discontinuous Lyapunov function was proposed, where sampling intervals that varied in terms of their nature, the dropouts, and network delays were taken into account. In Reference [
86], a
H2/H∞ control of random time delayed networked systems was proposed. In Reference [
87], the stability investigation of a NCS was achieved, where the communication between the controller and the plant input is through a digital channel, with dropouts in data-packets and finite-level quantization. Again, in Reference [
88], authors describe the stability of NCSs with respect to time-varying transmission intervals.
For discrete-time models, in Reference [
89], the difficulty of the networking-based
H∞ filtering method was described. A Markov jumping model based method was described to design
H∞ filters, in which the filter gains depend on both the network delays and dropouts in data-packets. In Reference [
90], a novel method was presented to calculate the stability of continuous linear systems with input containing the sampled data. In a technical note, Reference [
91] presented a new method with control packet loss. In Reference [
92], a networked control loop was considered in which the “slave” portion was a plant, and the “master” portion was the remote controller and observer. In networks, the fault detection of linear systems with restricted loss of data packets was proposed by Reference [
93]. In Reference [
94], a modern control system mapped on Networks-on-Chip was presented. The proposed architecture was supposed to play a pivotal role in real time applications like missile control system, robot trajectory, and satellite vehicle orbital trajectory control system. In Reference [
95], a NCS framework for the coordinated control of distributed generation sources in smart power grids was proposed. The system measurements were transmitted to the controller through a real-time communication network and the effects of delays and packet dropouts due to the communication network were modeled.
An event-triggered transmission scheme was proposed by Reference [
96] for a sampled-data control system. In Reference [
97], an event-triggering method was designed to decrease the network communication load, which could also be used to decide the time moment of the sampled signals. In Reference [
98], a methodology for the technological investigation of iterative learning control for sampled-data systems was proposed. In Reference [
99], a new Lyapunov functional was constructed to drive some stability criteria. Then, a channel utilization-based switched controller was designed to asymptotically stabilize the networked system in the sense of mean-square. It was shown that the proposed approach enhances the robustness of the networked control system to data drift and external disturbances. In Reference [
100], the cascade control was employed for stabilization of the singular NCSs. In Reference [
101], a network-based output controlled T-S fuzzy system was investigated that is steadied using a delayed fuzzy static controller, and not by any non-delayed static controller. In Reference [
102], a novel robust variable sampling period controller (RVSPC) was developed that takes into account random time delays and losses in data-packets. In Reference [
103], a decentralized event-triggered dissipative control was studied for systems having diverse physical characteristics. In Reference [
104], a distributed NCS scheme was proposed by considering the communication delays. The results were applied to reduce the inter-area swing oscillations in a power grid. A brief overview of NCSs was presented by Reference [
105] regarding the system configurations, challenging issues, and the methodologies.
In Reference [
106], a time-triggered zooming algorithm for the dynamic quantization at the sensor side was proposed that led to an exponentially stable closed-loop system. The algorithm included proper initialization of the zoom parameter. An exhaustive explanation of the various types of networked control techniques is given by Reference [
107]. The
H∞ output feedback control of NCSs with time delay and dropout in data-packets were considered in Reference [
108], whereas Reference [
109] discovered the nonlinear networked systems with tracking control problem. In Reference [
110], the data that uses self-healing technology was reviewed as input and was justified as big data. In Reference [
111] the method for time-delays in large-scale networked systems connecting sensors, controllers, and actuators was developed. A new sampling and control strategy was proposed by Reference [
112] to search a sub-optimal sampling sequence and control input sequence to minimize the disordering of data-packets. Further, in Reference [
113], an original state space model was set up, in which both the tracking error and the state variables were combined and optimized. The optimal estimation problem in lossy NCSs with randomly dropped control data-packets was elaborated in Reference [
114]. In Reference [
115], the problem of Sliding Mode Controller (SMC) for NCSs was considered with semi-stochastic switching, popularly known as Markov or stochastic switching and having unsystematic dimensions. In Reference [
116], a phenomenon of self-triggered sampling was proposed for a networked system with considerations of data losses and delay in communication. In Reference [
117], both the
D-stability, as well as the properties of finite
L2-gain, were studied for a class of uncertain discrete-time systems with time varying network-induced delays [
118,
119].
A summary of the distributed NCSs was presented by Reference [
105]. In Reference [
120], stochastic nonlinear time-delay systems were considered that take the help of observer-based fuzzy output-feedback control (OFOFC). In Reference [
121], the stochastic linear systems with random data dropout designed by a Bernoulli random variable were described. In Reference [
122], the state and fault estimation problem for Linear Time (LT) switched systems with immediate disturbances and faults, was considered. Also, the two types of observer-based approaches were considered.
A procedure to evaluate the wellbeing of Centralized Power Systems (CPSs) in the event of cyber-attacks was described by Reference [
123]. The problem of switched type networked systems with external disturbance and faults was investigated in Reference [
124]. In Reference [
125], the main cause of
H∞ control for uncertain discrete-time domain T-S fuzzy systems was considered.
The problem of state estimation for linear stochastic methods with event-triggered communication and packet loss was determined in Reference [
126]. In Reference [
127] event-triggered coordination for multi-agent structures/systems was elaborated. A survey on the distributed type of control and distributed type of filtering had been provided by Reference [
128] for industrial CPSs, explained by different mathematical equations. In Reference [
129], the problem of event-based network-induced time-varying delays with output tracking control for nonlinear NCSs approximated by type-2 fuzzy systems was investigated. In Reference [
130], the authors addressed the concern for multi-layer, data-driven cyber-attacks, developed to boost ICS cyber security. In Reference [
131], the control of automotive active suspension system using Proportional Integral Derivative (PID) and Linear Quadratic Regulator (LQR) methods was discussed. In Reference [
132], a closed-loop controller model considering cyber-attacks and the mixed-triggering scheme, was proposed. In Reference [
133], a robust fault detection scheme for networked control systems (NCSs) was developed with limited quality of services (QoS), such as network-induced time delay, data dropout, and error sequence. In Reference [
134], a survey on time-delay approach to networked control systems (NCSs) was provided, which discusses the fundamental network-induced issues in NCSs and the main approaches to the modeling of NCSs. Again, an investigation on distributed type of control and distributed type of filtering for CPSs described by dynamic mathematical modeling equations was presented by Reference [
135]. In Reference [
136], a scheme called robust approximation-based model predictive control (RAMPC) was developed for the constrained networked control systems (NCSs) subject to external disturbances. This paper also provides a roadmap to evaluate the permissible sampling period and also evaluates the necessary conditions for the feasibility of the RAMPC.
In Reference [
137], a sampled-data control problem was investigated for connected vehicles subject to switching topologies, communication delays, and external disturbances. It used an advanced tracking error-based sampled-data platoon control method. In Reference [
138], authors were concerned with the modeling and controlling using the mixed event-triggered mechanism (ETM) for NCSs with varying time-delays and uncertainties. In Reference [
139], authors investigated about the switching-like event-triggered control for networked control systems (NCSs) under the malicious denial of service (DoS) attacks. In Reference [
140] authors proposed an iterative learning control (ILC) scheme to synchronize an array of non-identical neural network systems based on time-varying delay in a repetitive environment. In Reference [
141], authors considered a resilient event-triggered control problem for a class of networked systems subject to randomly occurring deception attacks. In Reference [
142], a novel method is proposed for line selection and fault location in a distribution network based on a cloud-edge-terminal hierarchical fault monitoring and control system. Reference [
143] focuses on the event-triggered control problem for networked switched systems with actuator saturation. Here, an event-triggering strategy is developed based on discrete event-triggered samplings.
In Reference [
144], authors investigated the stability problem for networked control systems. They have taken into consideration the input delays and multiple communication imperfections containing time-varying transmission intervals and transmission protocols. Reference [
145] focused on addressing the sliding mode control problem of continuous-time nonlinear networked control systems. In Reference [
146], the problem of fault-tolerant sampled-data
H∞ control for a networked control system with random time delays and actuator faults is investigated. In Reference [
147], the problem of event-triggered finite-time control for networked switched control systems with extended dissipative performance was investigated. In Reference [
148], the authors proposed a scheduling approach which can minimize the impact of delays and conflicts on the network, to improve the system stability, which results in an economical allocation of network resources, minimizes the traffic congestion, and improves the overall performance of the NCS.
In Reference [
149], the authors discussed about the effect of limited bandwidth on the system’s performance, particularly when the sampling period was small. In Reference [
150], the authors discussed the amalgamation of control and communication in NCSs that offers remarkable achievement in the design and analysis of such controlled systems. In Reference [
151], the authors discussed the LMI approach to effectively compensate for the random network-induced delays and provide the desired control performance. In Reference [
152], a new ETM was proposed, under which data packets could be actively dropped within consecutive steps, thereby, saving more communication resources than the existing ETM. In Reference [
153], the authors proposed the descriptive analysis about classification of cyber-attacks and threats related to security in industrial control systems. In Reference [
154], the authors proposed a new quantization structure, and a mathematical treatment of this structure was given to illustrate the advantage for the quantization effects.
The above developments can be summarized in tabular form in
Table 4 on the basis of area/network/parameter as follows.
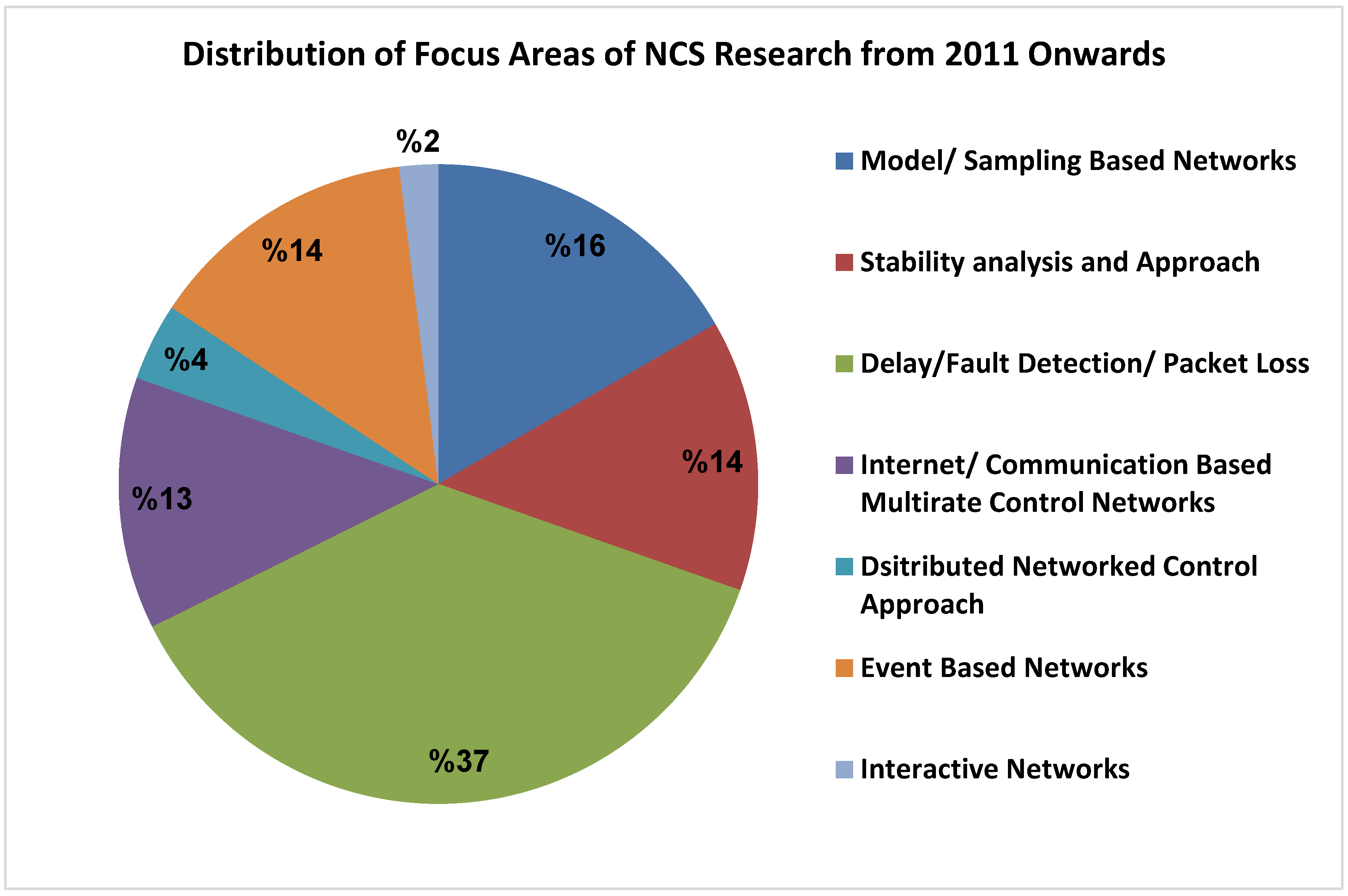
Table 4 gives the structured information on the distribution of papers in different areas published from the year 2011 onwards. The major focus of research during this phase was on the delay-based networks. The difference between the works published in the earlier phases is that the security approach, model-based approach, and the sampled-based approach involve the incorporation of delays. Secondly, the advanced model-based networked approaches, such as Model-Predictive Control (MPC), OFOFC networks, etc., were proposed, which make the networked system more stable and improve its performance.
Figure 5 shows the distribution of papers during this phase. It can be clearly noticed that major focus is on the delay-based approach, which covers approximately 37% of the research contribution. The stability approach is also very important as the stability depends on delay. If the delay is maximum, the system has to be designed to make it stable. To achieve this purpose, many event-based techniques were developed.


 ,
, 



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}