Low Inertia Systems Frequency Variation Reduction with Fine-Tuned Smart Energy Controllers



Abstract
:1. Introduction
1.1. Problem Formulation
1.2. Literature Review
1.3. Contribution/State-of-the-Art
- Utilizing smart energy controllers and storage units to evaluate the behavior and the challenges in operating those supporting technologies on a real projection case study predicted to be representative for the Cyprus’ real distribution grid during the year 2050.
- The importance of appropriately choosing the parameters of the smart energy controllers is presented. In this way, the target of keeping the grid stable and increasing the availability and sustainability of the power grid is achieved.
- The distributed smart controllers are implemented in DERs divided in areas of control to follow the WoC concept. At the same time, hierarchical controllers are responsible for coordinating these control areas and ensuring system stability.
- The projection study has been modified to include the 2050 horizon for the grid transformation. This is a key element as the system has even lower inertia and the frequency stability reservation is more challenging for the employed controllers.
- As such, the parametrization of the controllers is of paramount importance as the characteristics of the 2050 grid dictates precise and robust controllers.
- The WoC concept is enabled to foster the controllers’ actions and cooperation, and ensure complementarity of actions.
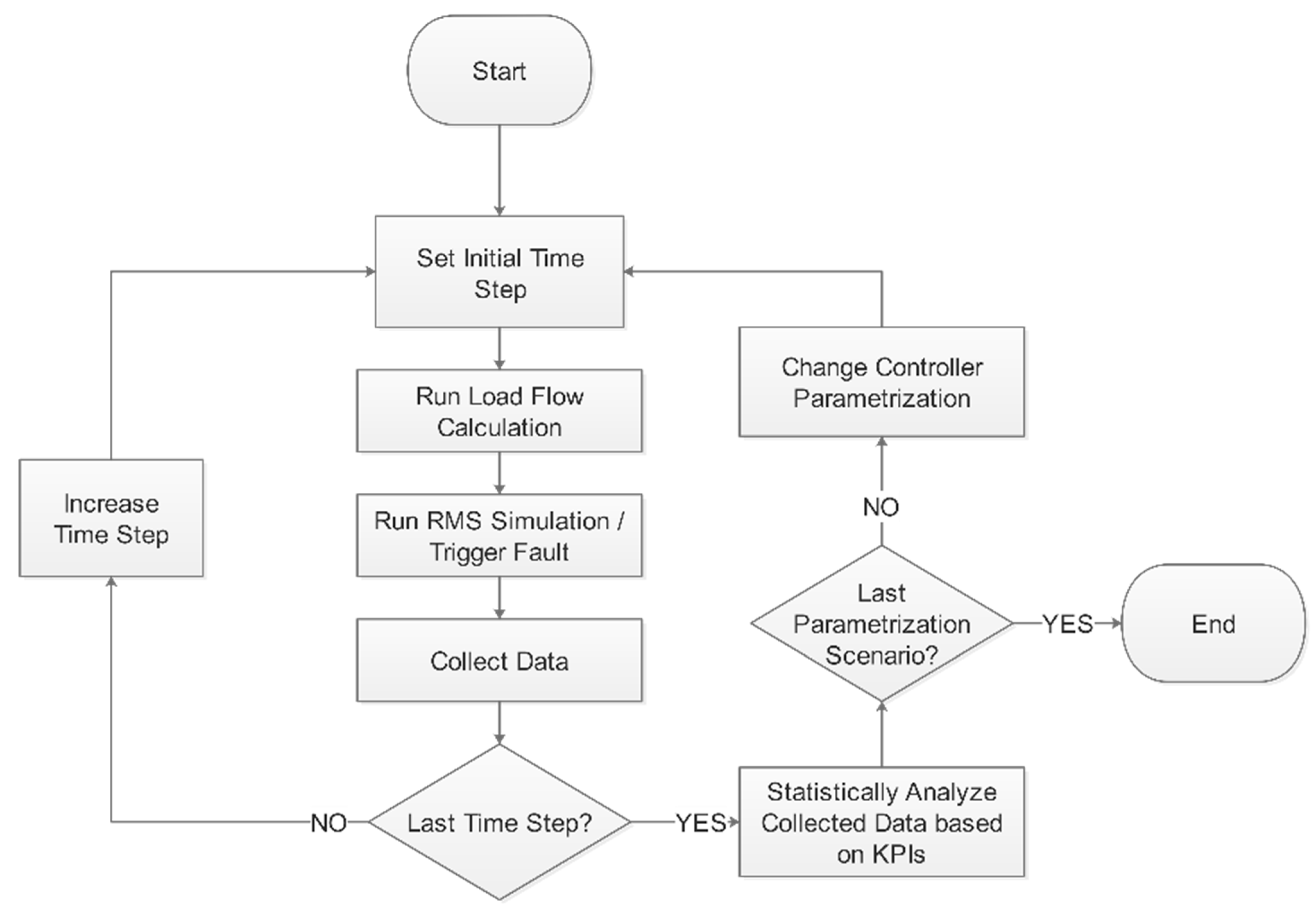
2. Methodology—Case Study
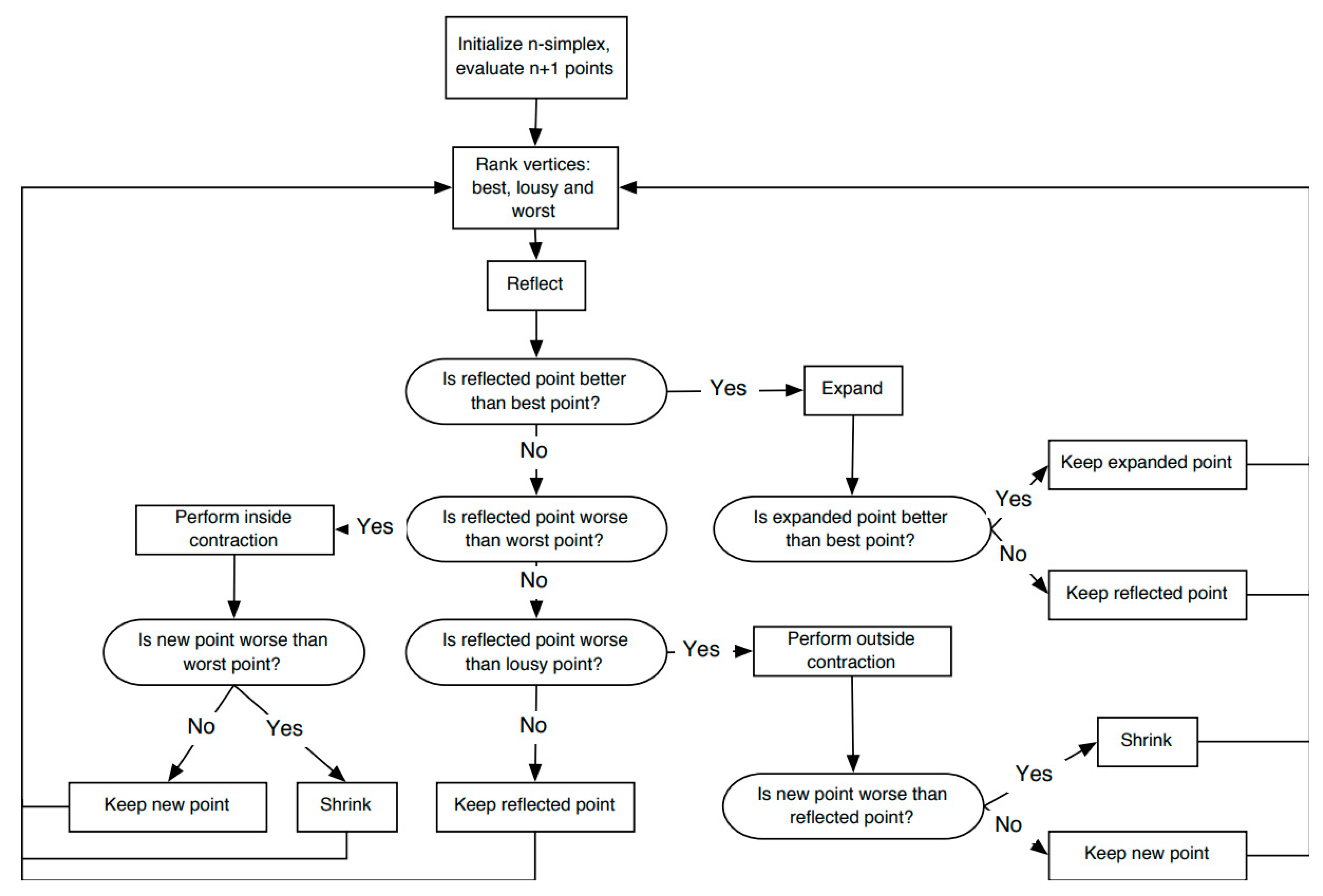
2.1. Parameter Estimation via the Nelder-Mead Algorithm
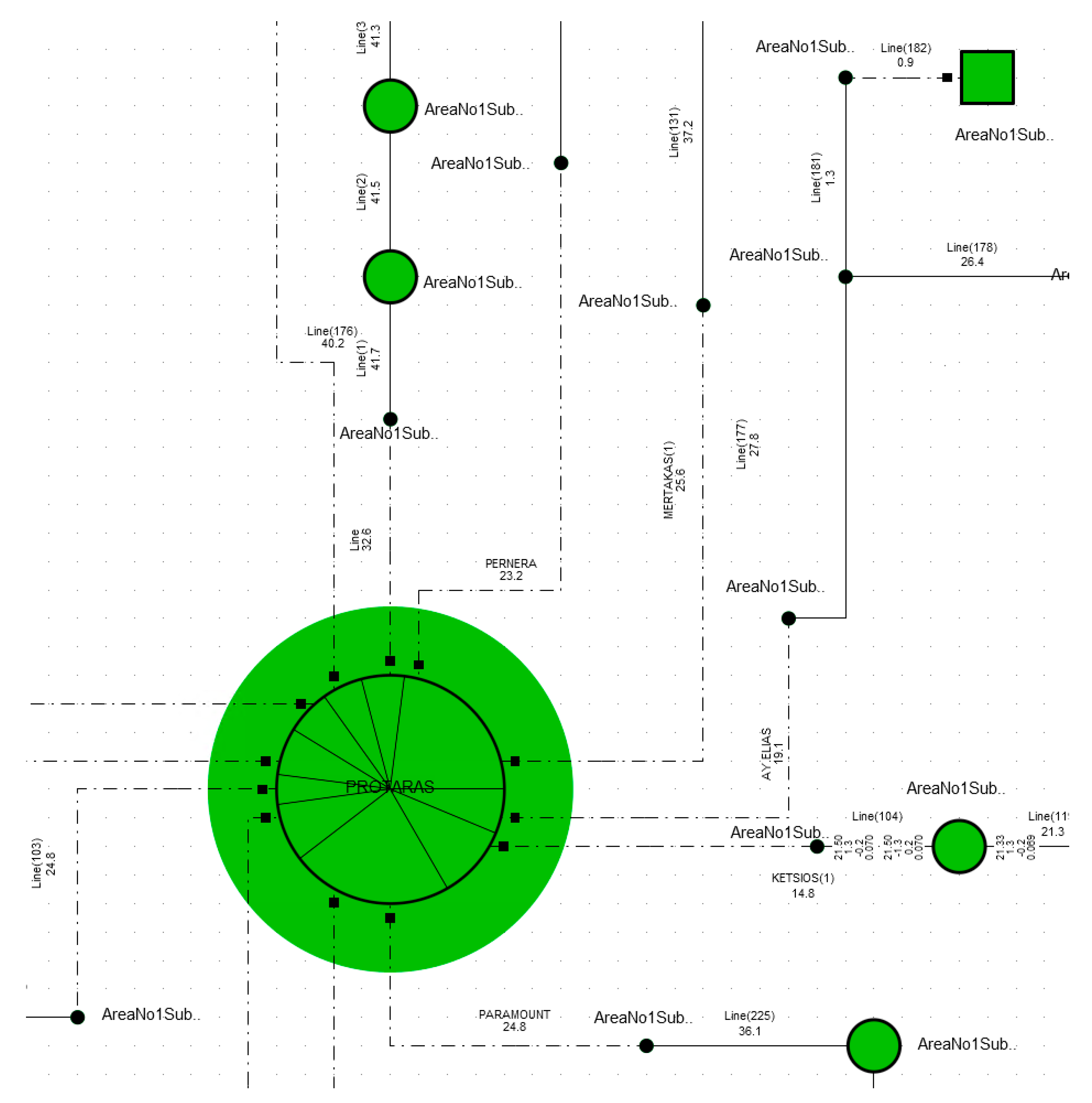
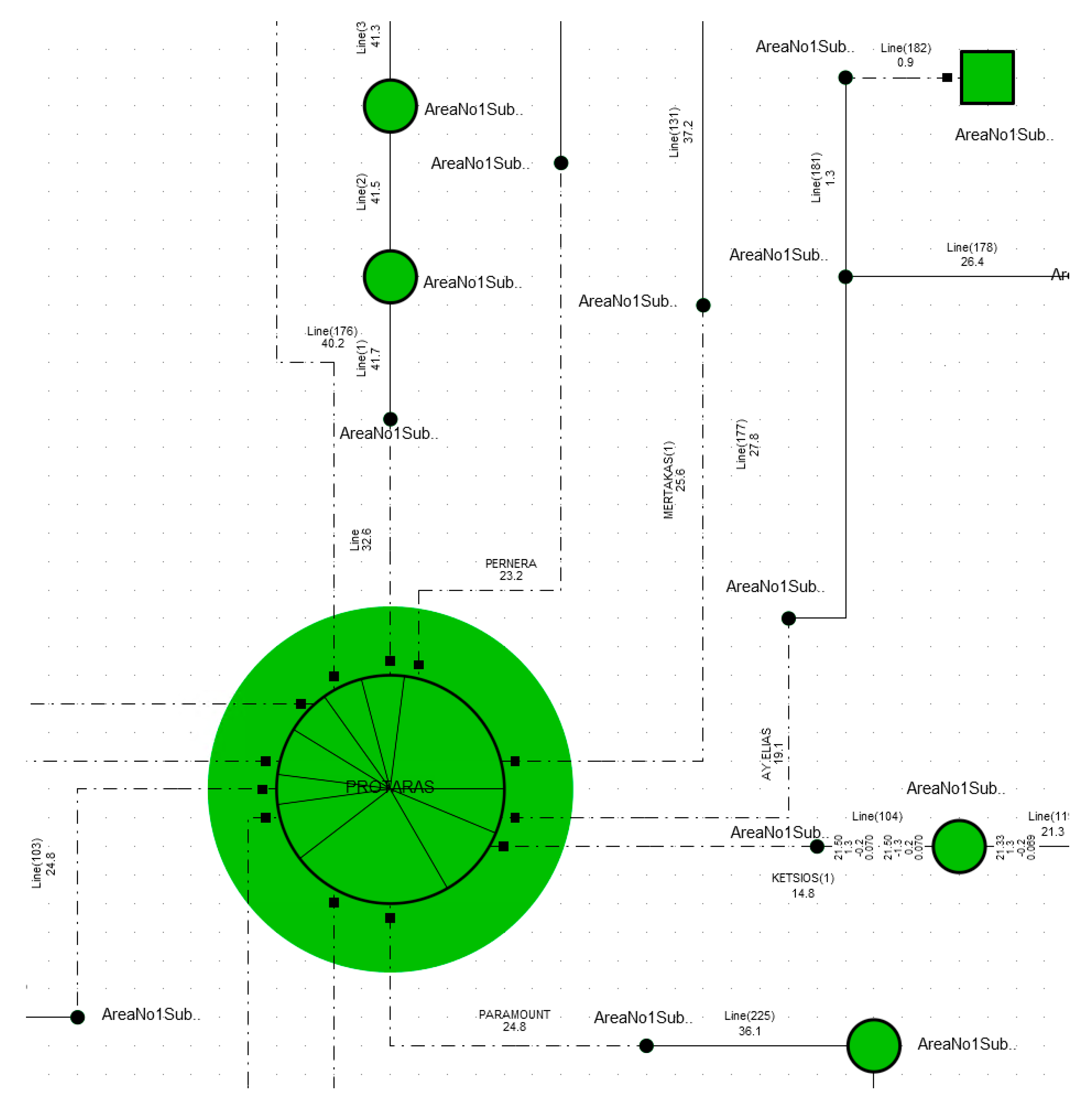
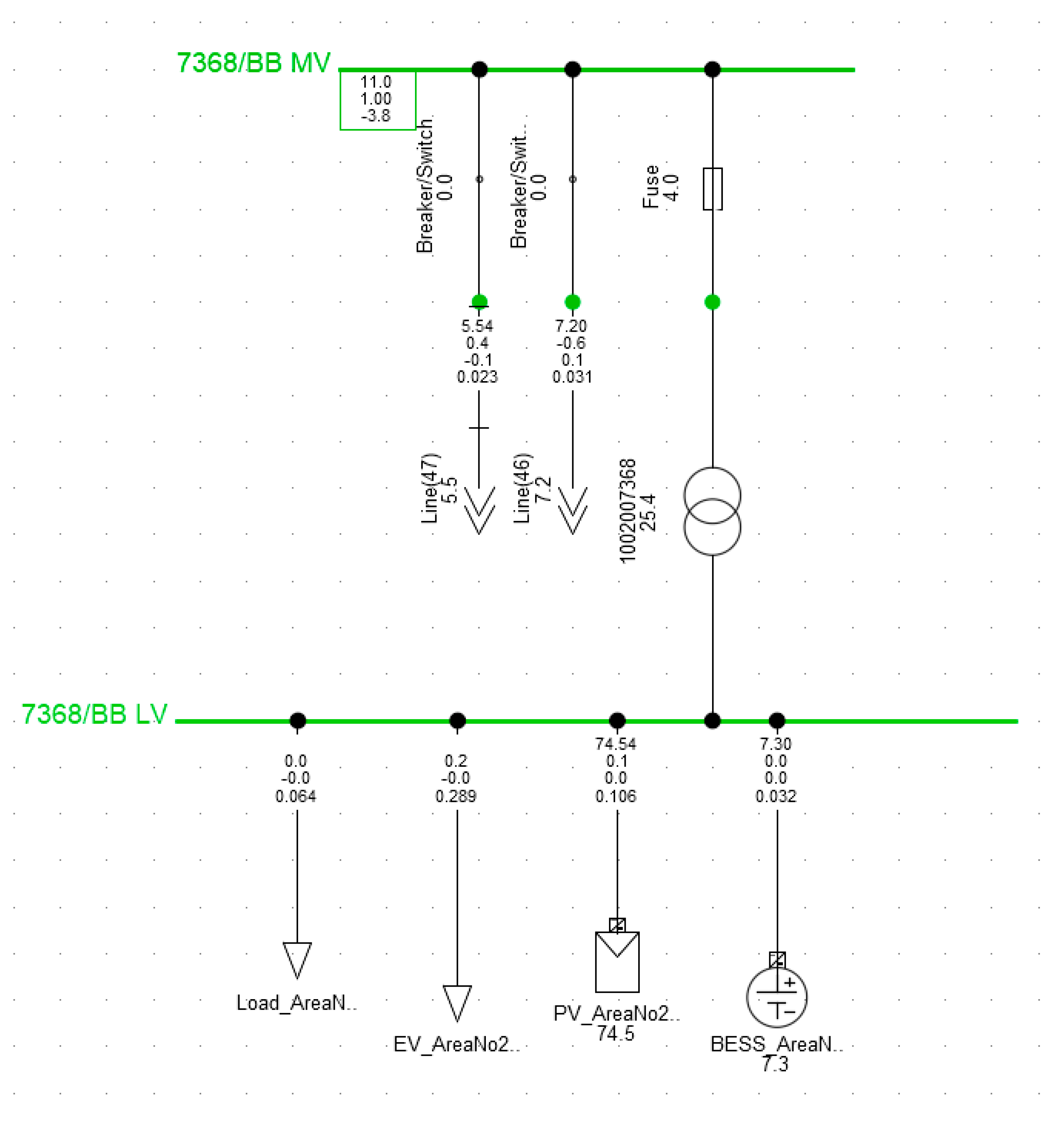
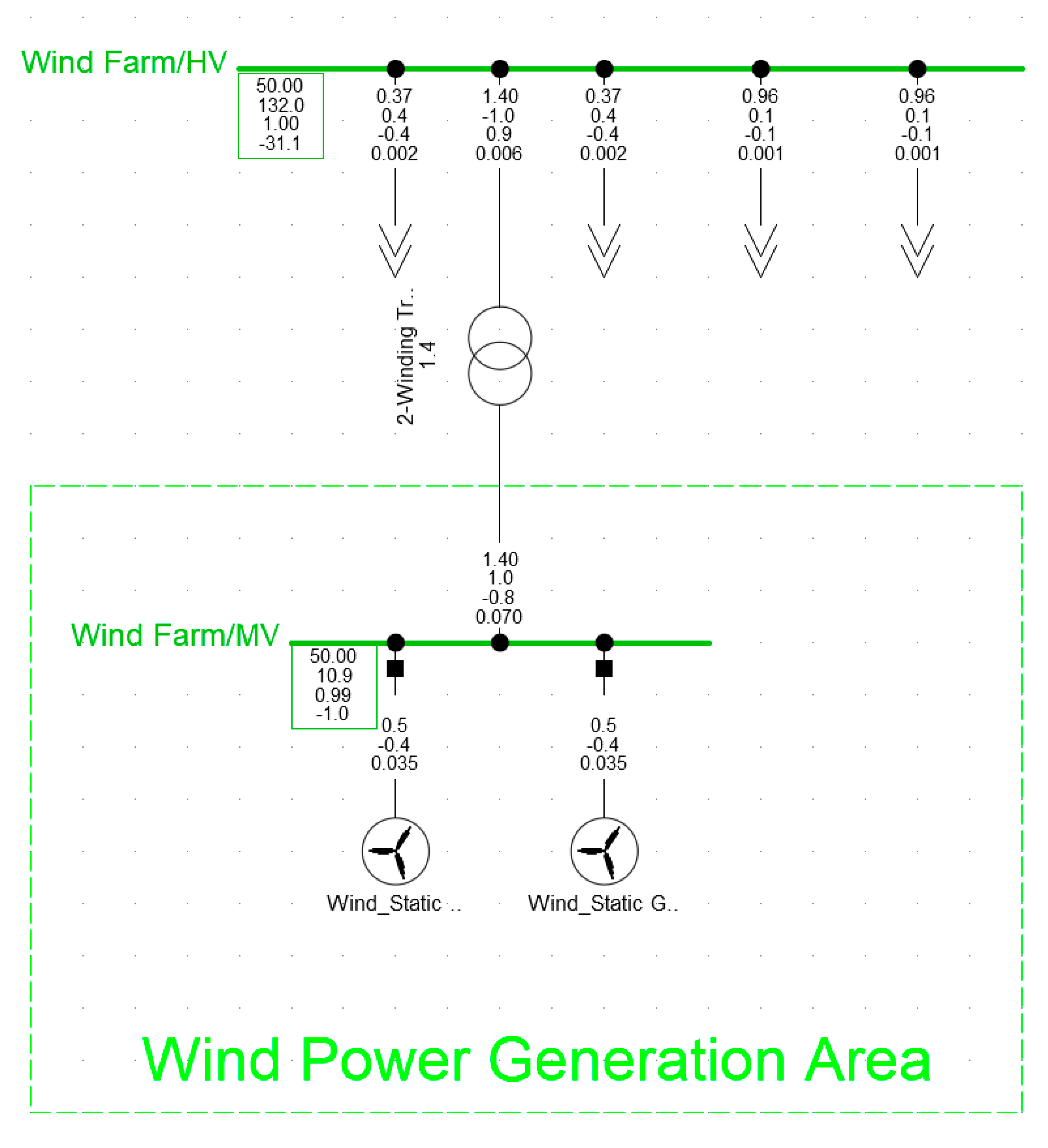
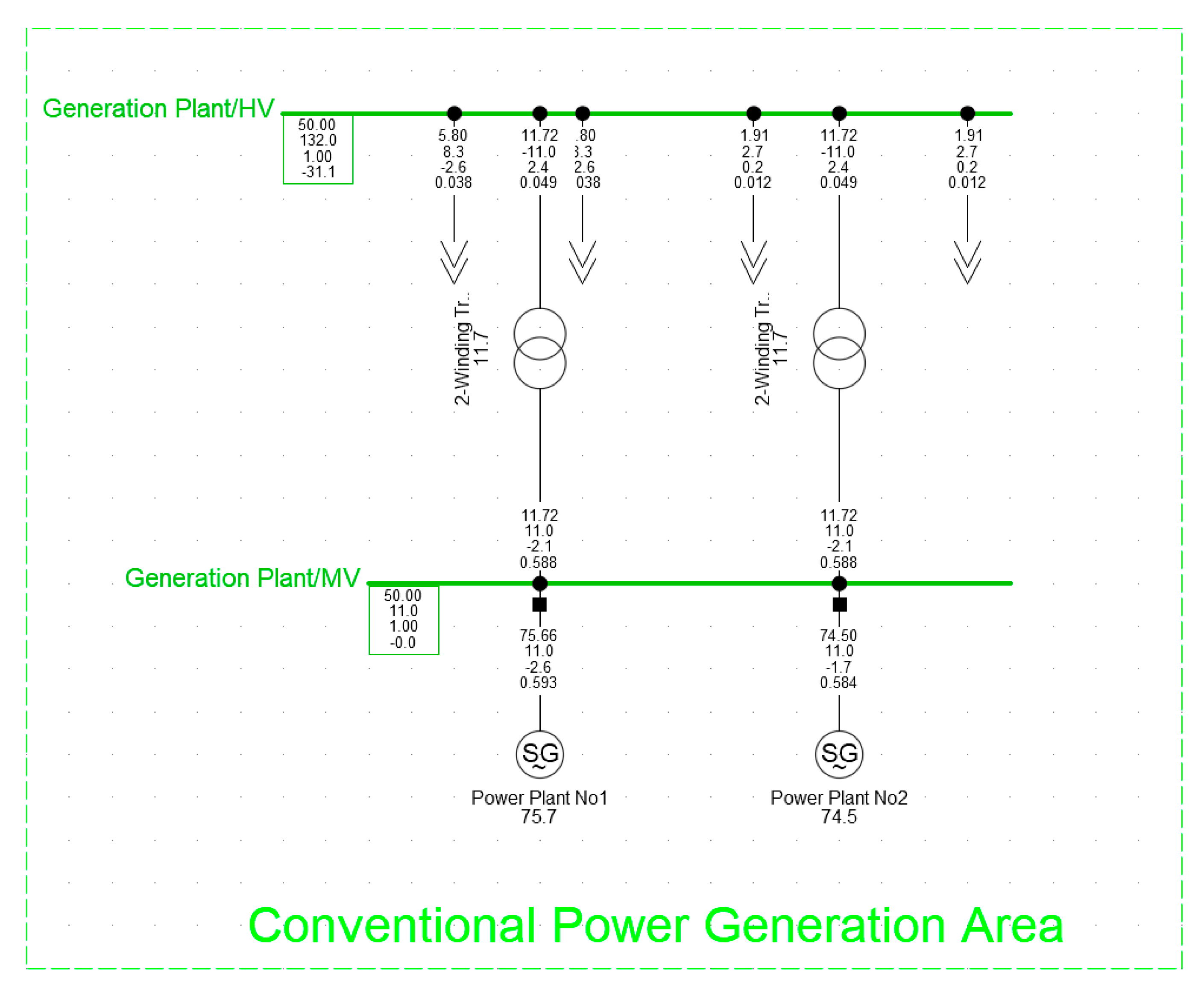
2.2. Selected Section of the Cyprus Grid System
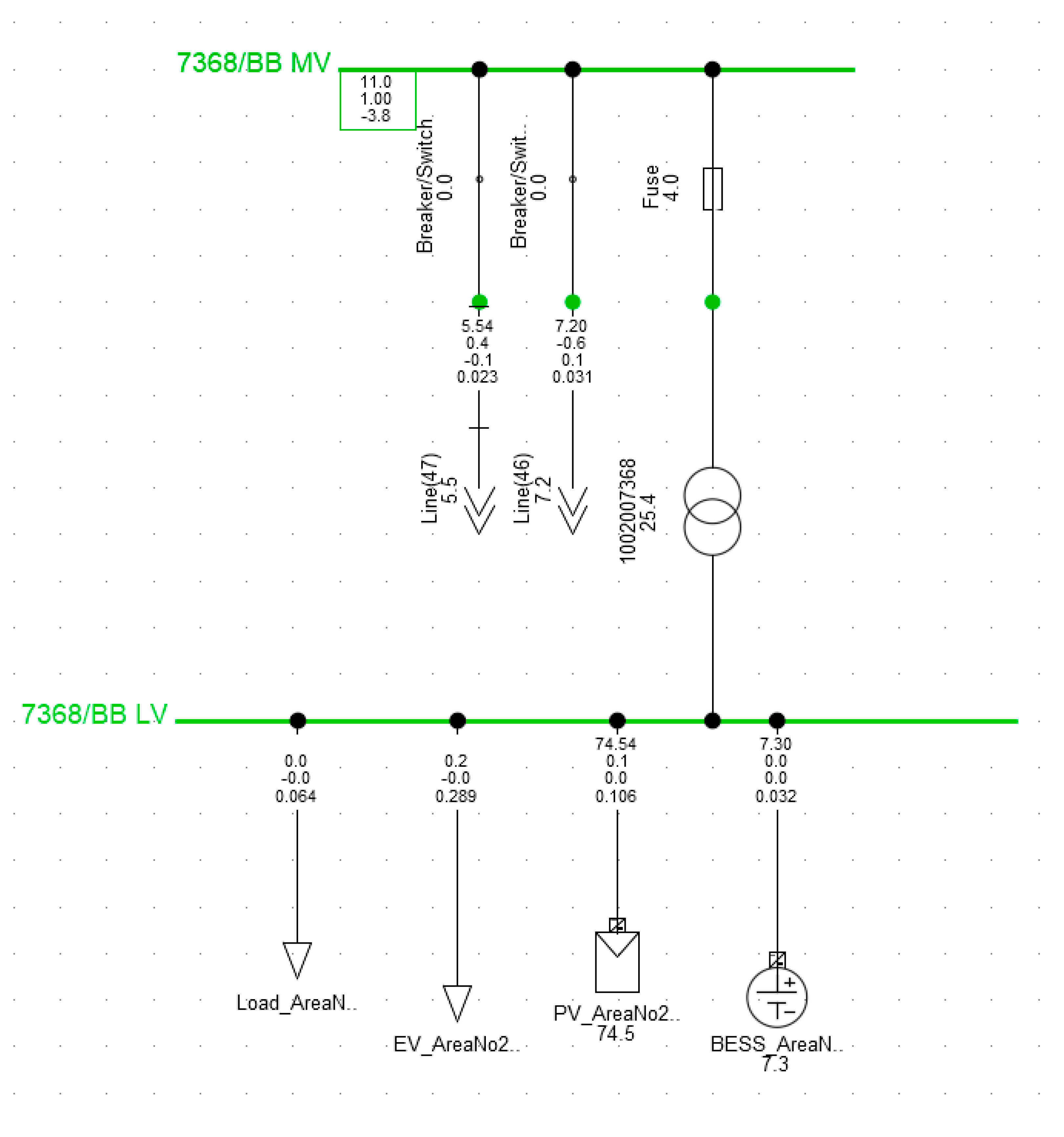
2.3. The Grid Model Used for the Analysis
2.4. Scenario
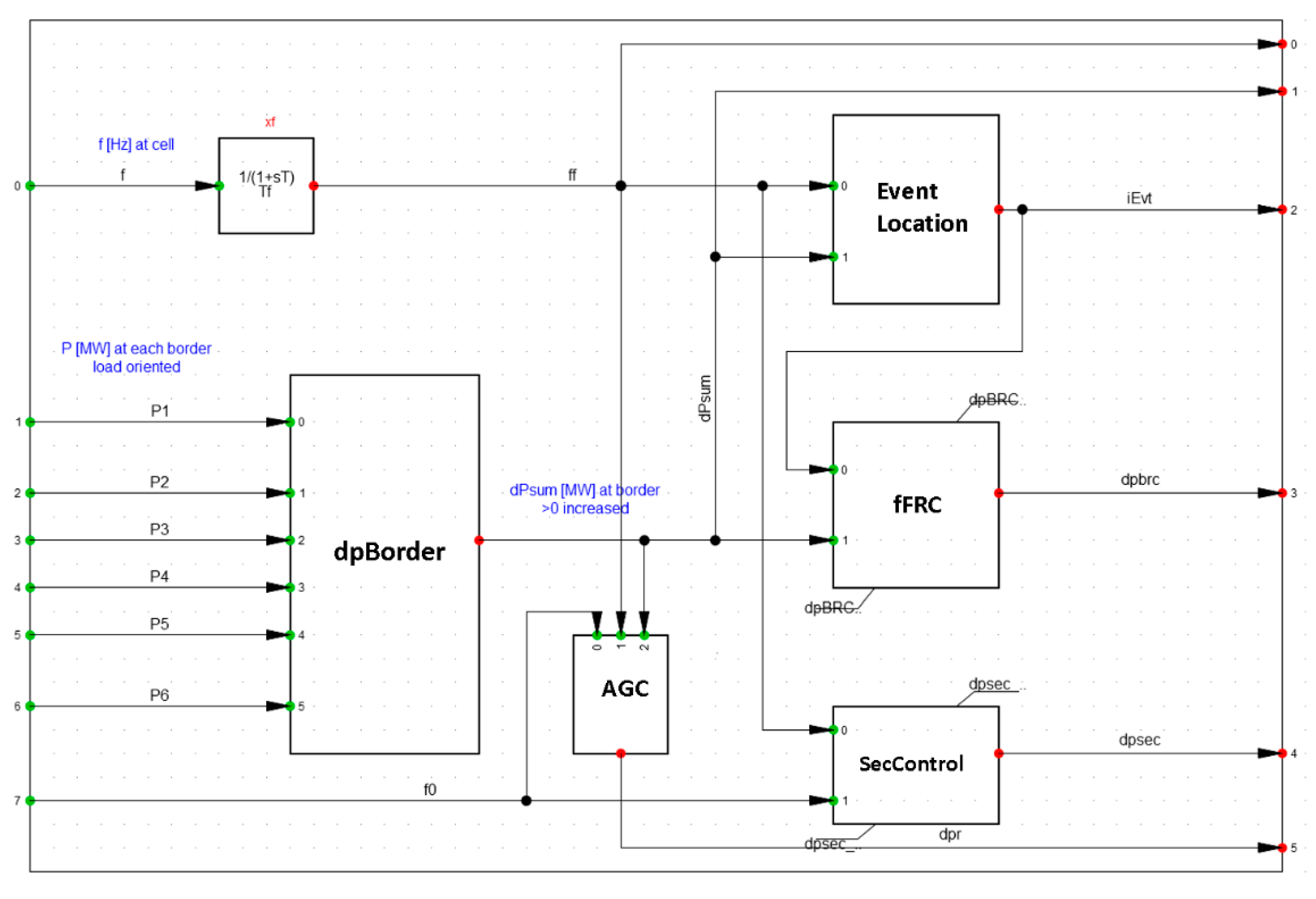
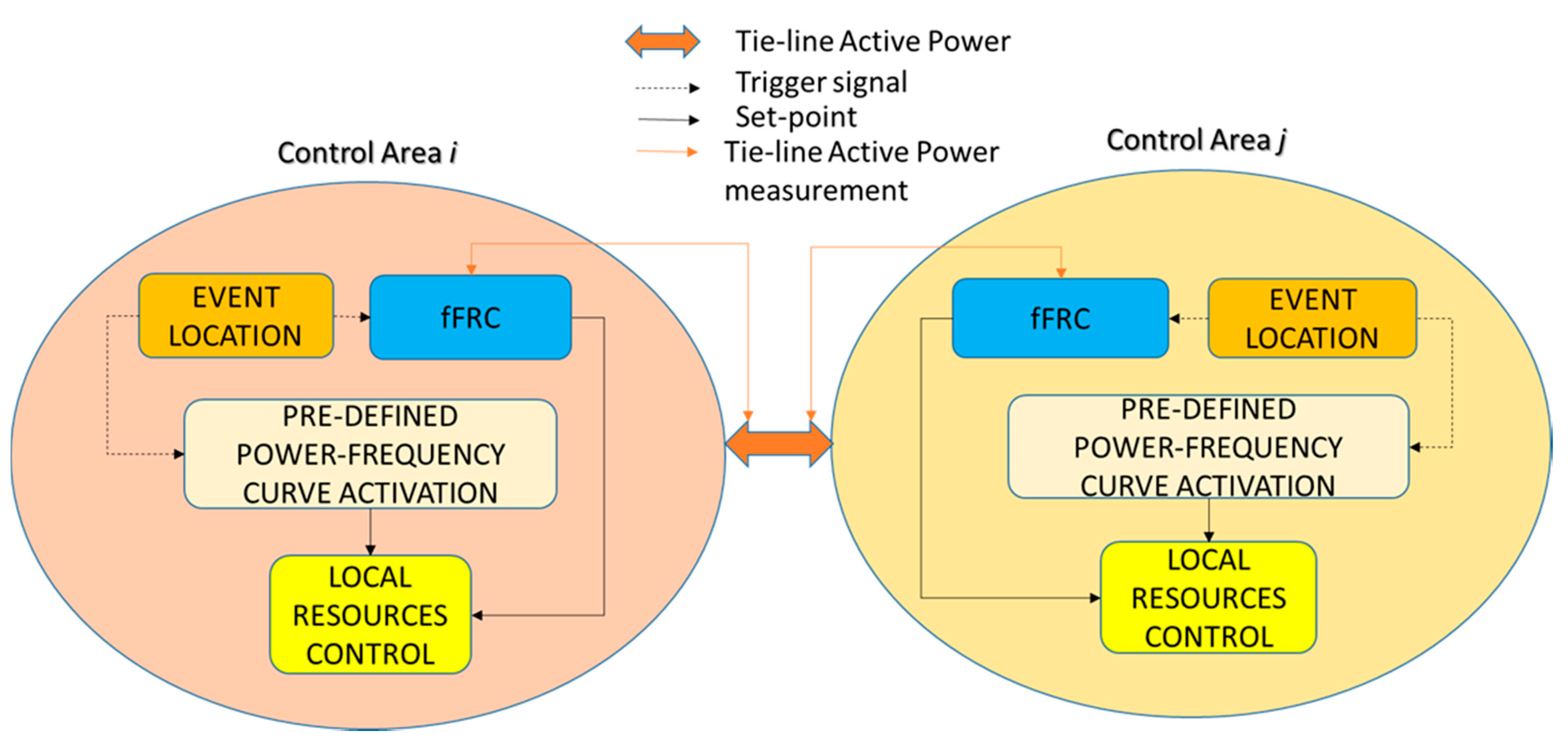
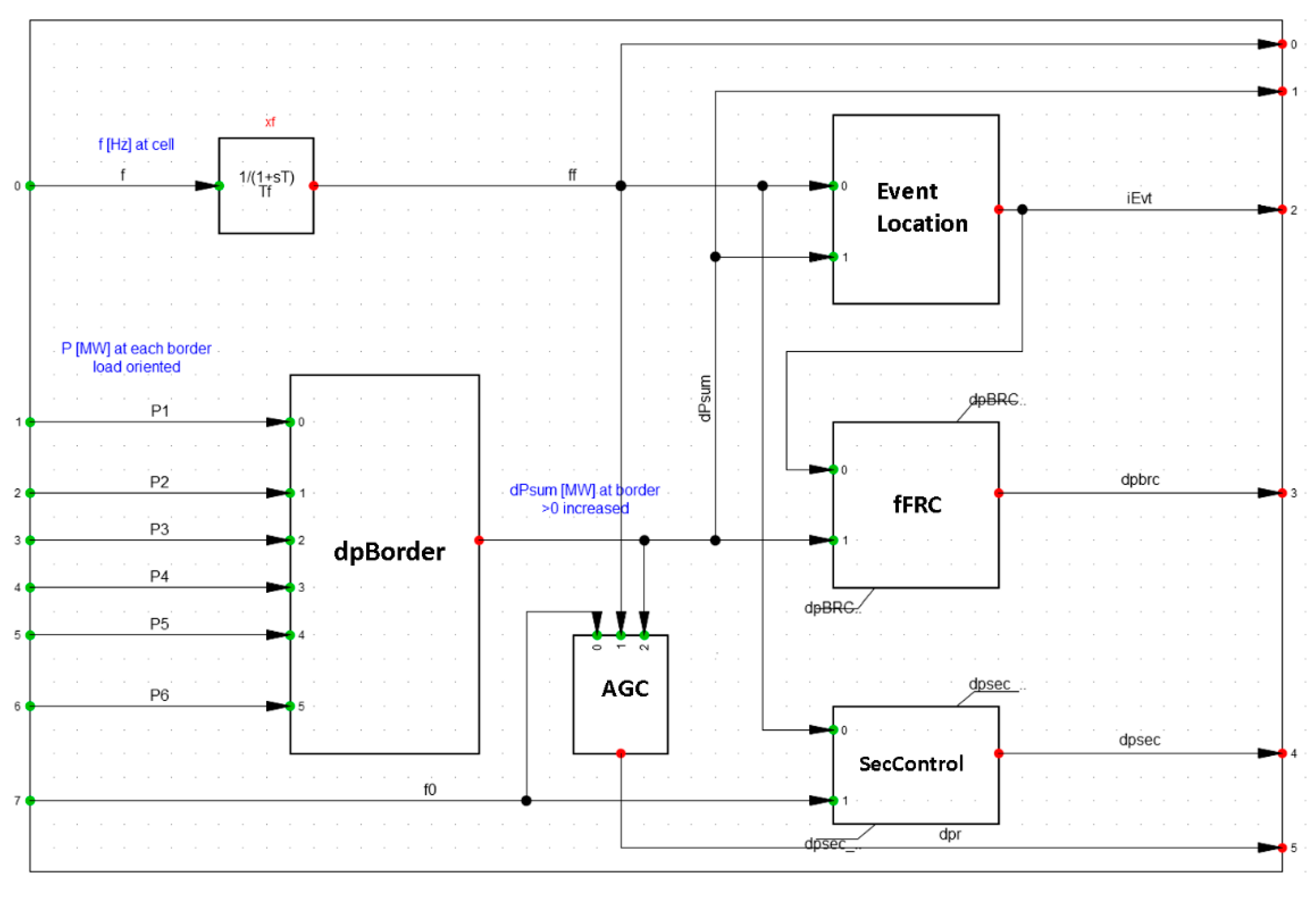
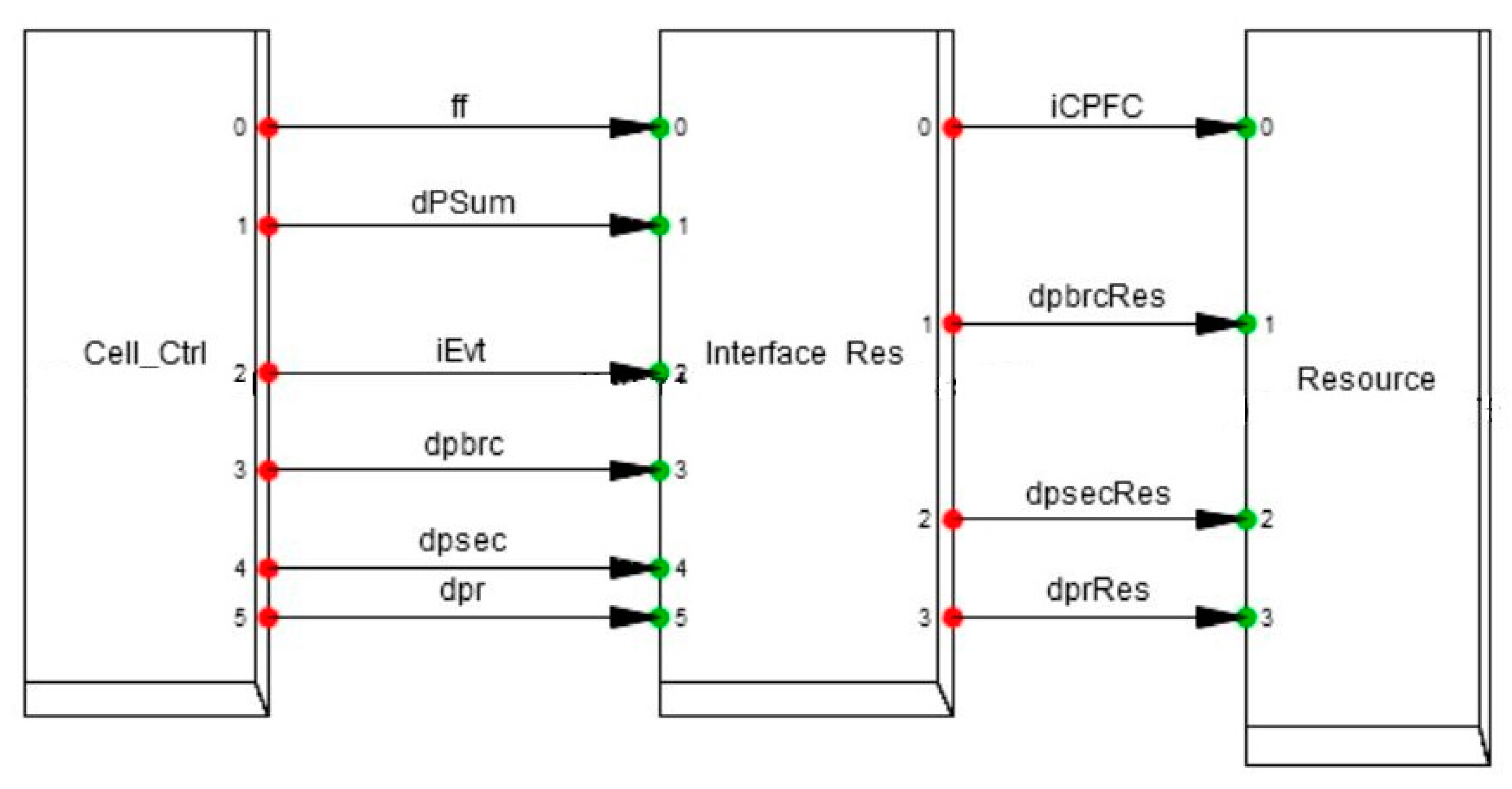
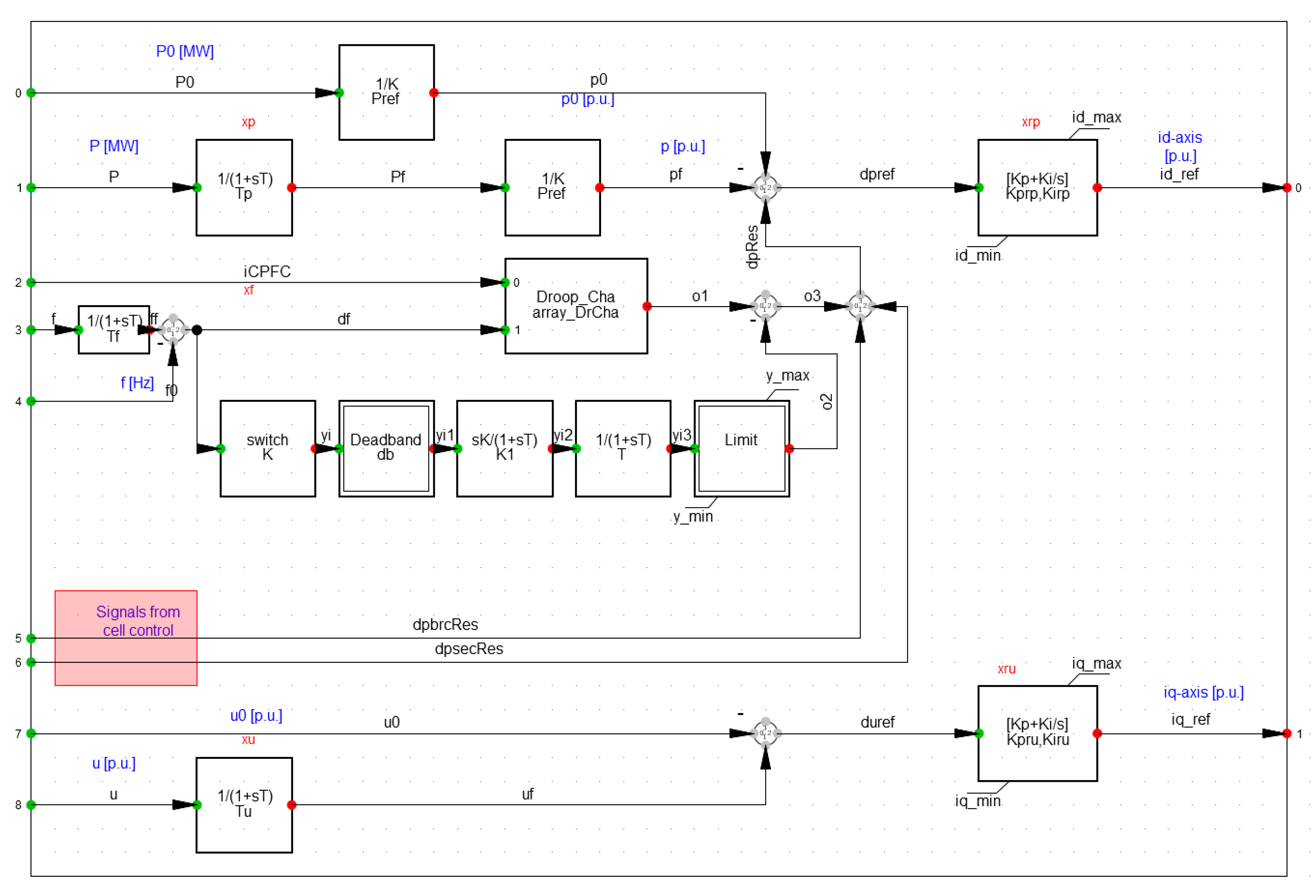
2.5. Control Scheme
- Event Location;
- fFRC—fast Frequency Restoration Control;
- Pre-defined Power–Frequency curve calculation;
- Local Resources Control;
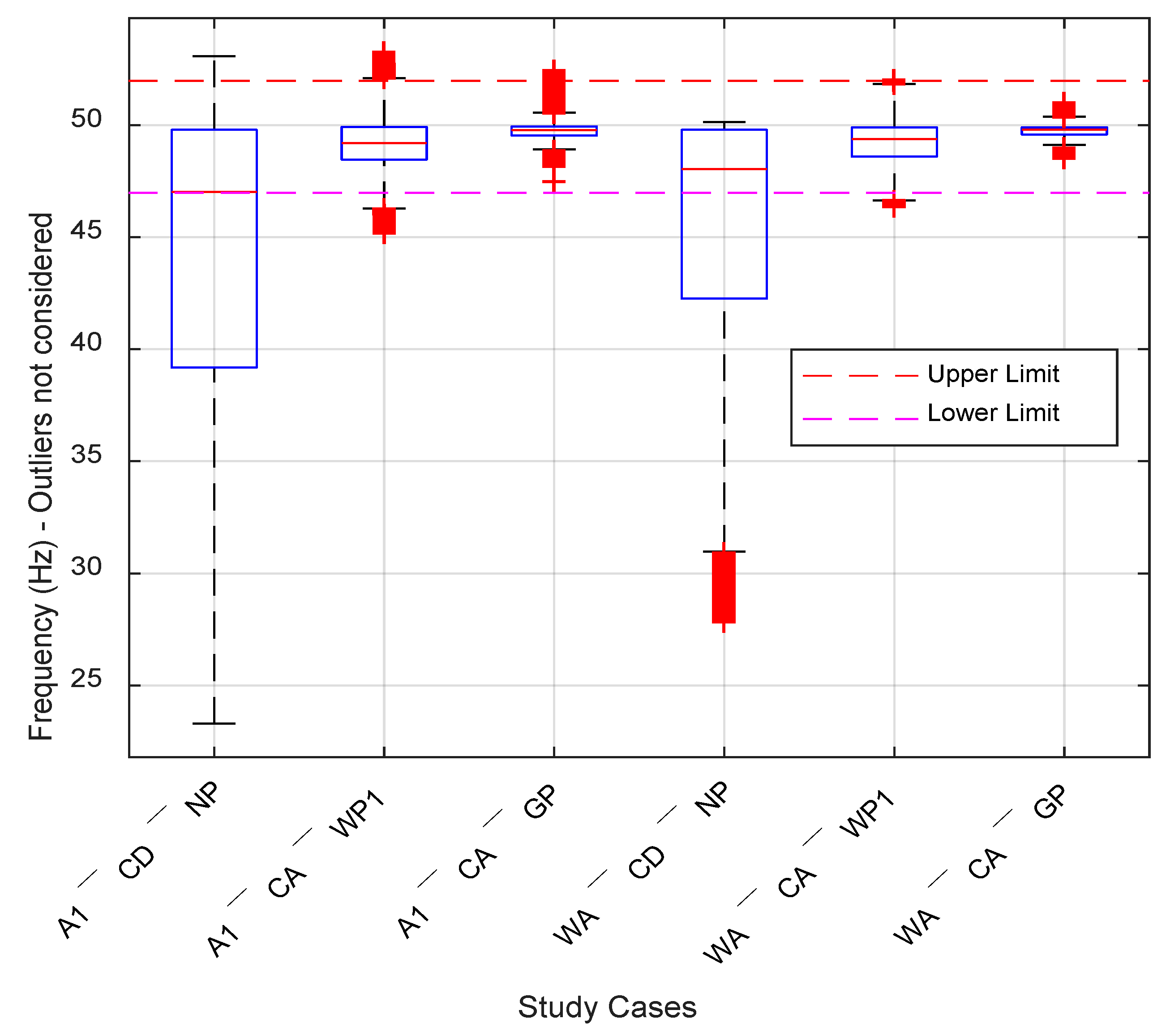
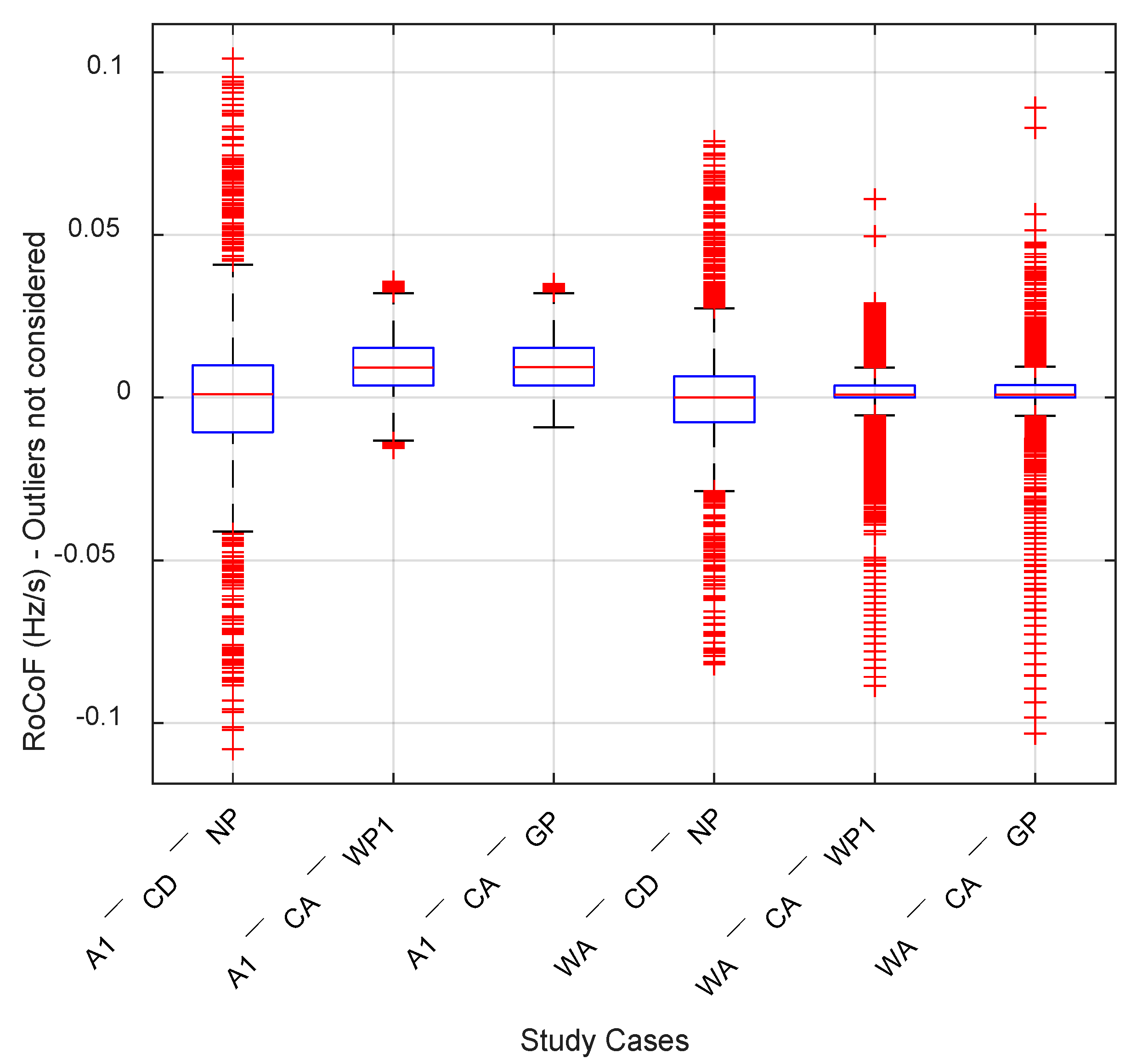
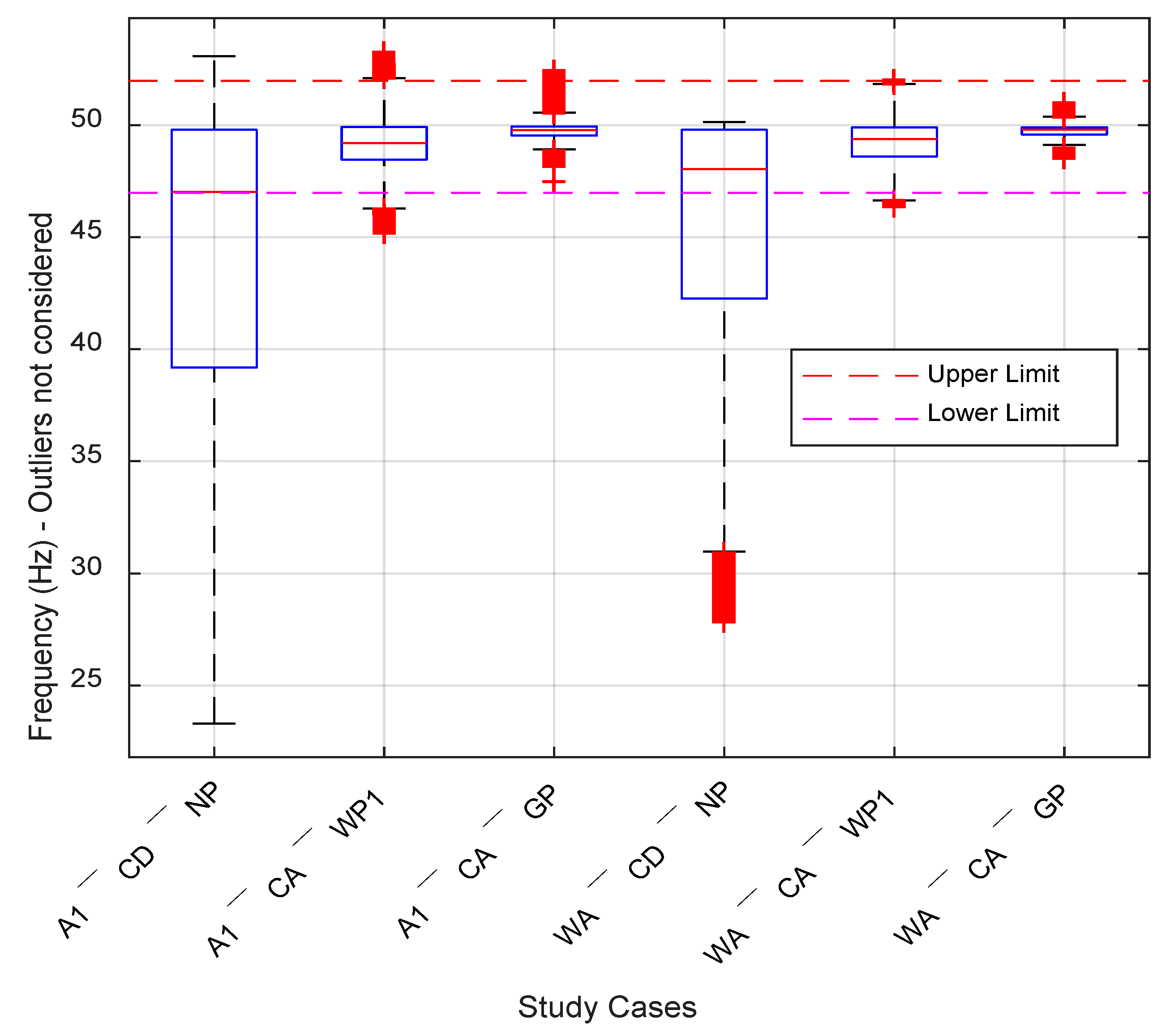
3. Simulation Case Results
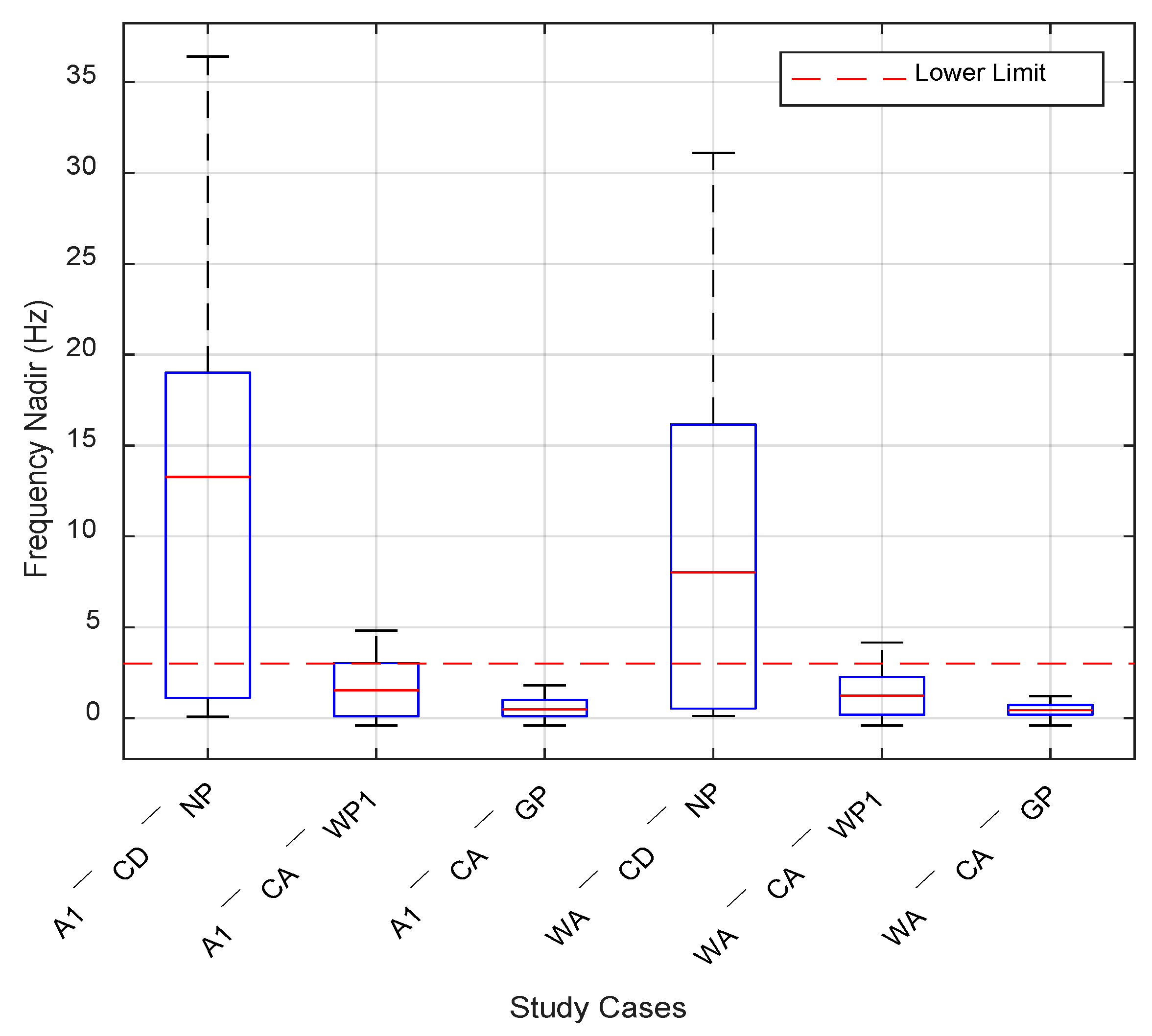
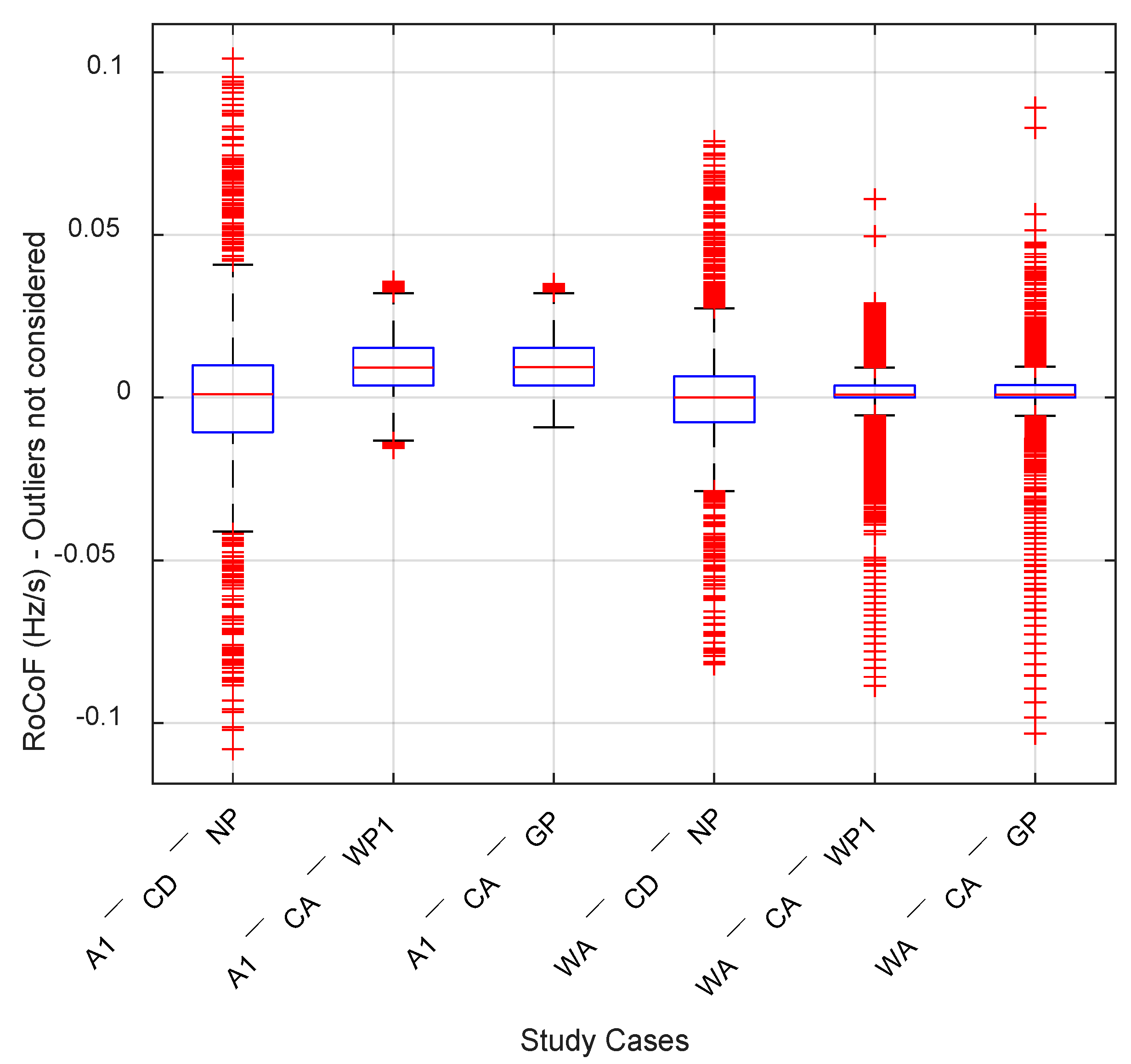
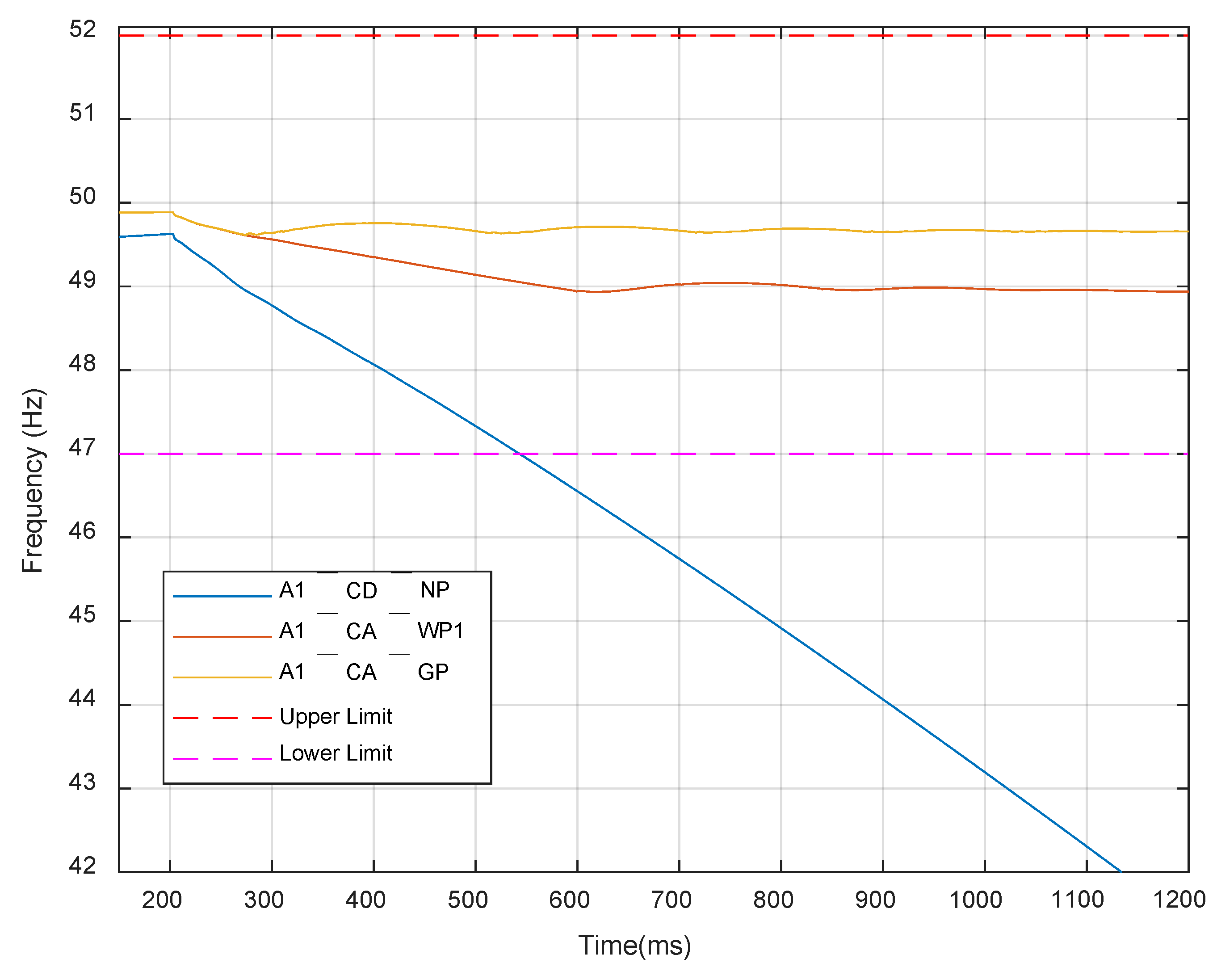
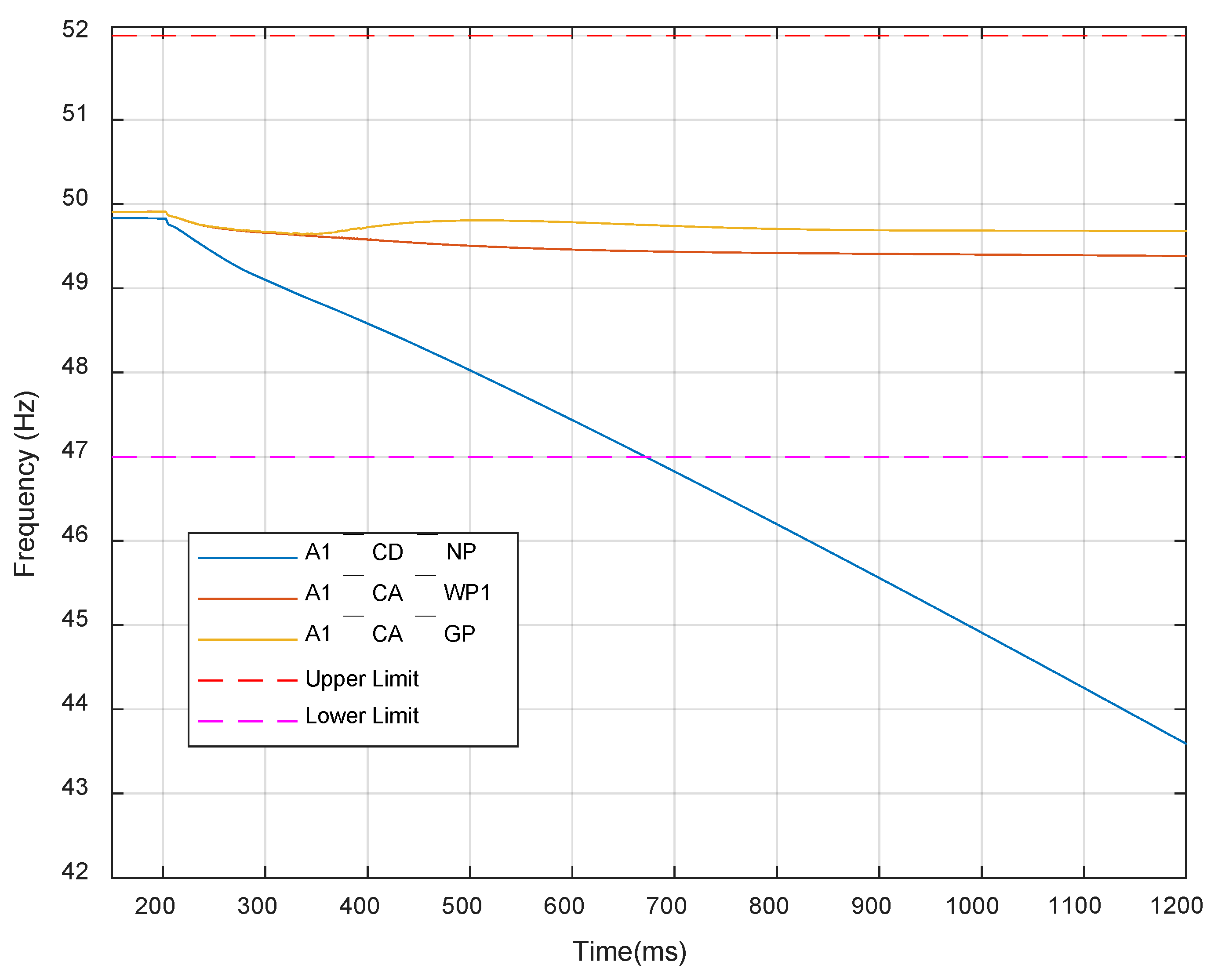
- A1—CD—NP: Area No 1—Controllers Deactivated
- A1—CA—WP1: Area No 1—Controllers Activated—Wrong Parametrization No 1
- A1—CA—GP: Area No 1—Controllers Activated—Good Parametrization
- WSA—CD—NP: Wind Station Area—Controllers Deactivated
- WSA—CA—WP1: Wind Station Area—Controllers Activated—Wrong Parametrization No 1
- WSA—CA—GP: Wind Station Area—Controllers Activated—Good Parametrization
4. Discussion
- Results of frequency variation showed that the frequency controllers adopted can minimize the frequency variation effectively.
- The steep frequency variation was avoided in a statistically higher number of cases when the parametrization of controllers was the appropriate one.
- The controllers forced the frequency to get into the acceptable range, causing lower RoCoF values if the correction by the controllers was undertaken on time.
- It was justified and verified that the frequency controllers were mandatory for achieving frequency regulation within the desired range.
- The frequency Nadir was reduced significantly if the controllers were tuned appropriately.
- The overall frequency stability was improved with the utilization of smart frequency controllers.
- The smart frequency controllers can be effective in regulating frequency levels within acceptable ranges and therefore reduce the danger of major/partial shutdown of the power grid.
- The smart frequency controllers must be designed accordingly to be able to cope with the event/fault types always in coordination with the hierarchical control regime of the system.
5. Conclusions
- A methodology for evaluating the performance of smart frequency controllers responsible for the stability of power systems.
- A real simulation case which includes an extended power grid composed of both transmission and distribution networks.
- Adoption of distributed power sources for frequency control/support.
- The related projection information/time series/technologies for the evolution of the Cyprus grid system for the year 2050.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Winter, W.; Elkington, K.; Bareux, G.; Kostevc, J. Pushing the Limits: Europe’s New Grid: Innovative Tools to Combat Transmission Bottlenecks and Reduced Inertia. IEEE Power Energy Mag. 2015, 13, 60–74. [Google Scholar] [CrossRef]
- Holttinen, H.; Tuohy, A.; Milligan, M.; Lannoye, E.; Silva, V.; Müller, S.; Sö, L. The Flexibility Workout: Managing Variable Resources and Assessing the Need for Power System Modification. IEEE Power Energy Mag. 2013, 11, 53–62. [Google Scholar] [CrossRef]
- Thies, H.H.; Schneider, M.; Zdrallek, M.; Schmiesing, J. Future structure of rural medium-voltage grids for sustainable energy supply. In Proceedings of the CIRED 2012 Workshop: Integration of Renewables into the Distribution Grid, Lisbon, Portugal, 29–30 May 2012; pp. 1–4. [Google Scholar]
- Pouresmaeil, E.; Mehrasa, M.; Godina, R.; Vechiu, I.; Rodríguez, R.L.; Catalão, J.P.S. Double synchronous controller for integration of large-scale renewable energy sources into a low-inertia power grid. In Proceedings of the 2017 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Torino, Italy, 26–29 September 2017; pp. 1–6. [Google Scholar]
- Keyhani, A.; Chatterjee, A. Automatic Generation Control Structure for Smart Power Grids. IEEE Trans. Smart Grid 2012, 3, 1310–1316. [Google Scholar] [CrossRef]
- Zhang, Y.; Rahbari-Asr, N.; Duan, J.; Chow, M. Day-Ahead Smart Grid Cooperative Distributed Energy Scheduling With Renewable and Storage Integration. IEEE Trans. Sustain. Energy 2016, 7, 1739–1748. [Google Scholar] [CrossRef]
- Patsalides, M.; Papadimitriou, C.N.; Efthymiou, V.; Ciavarella, R.; Di Somma, M.; Wakszyńska, A.; Kosmecki, M.; Graditi, G.; Valenti, M. Frequency Stability Evaluation in Low Inertia Systems Utilizing Smart Hierarchical Controllers. Energies 2020, 13, 3506. [Google Scholar] [CrossRef]
- Toma, L.; Sanduleac, M.; Baltac, S.A.; Arrigo, F.; Mazza, A.; Bompard, E.; Musa, A.; Monti, A. On the virtual inertia provision by BESS in low inertia power systems. In Proceedings of the 2018 IEEE International Energy Conference (ENERGYCON), Limassol, Cyprus, 3–7 June 2018; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Morren, J.; de Haan, S.W.H.; Kling, W.L.; Ferreira, J.A. Wind turbines emulating inertia and supporting primary frequency control. IEEE Trans. Power Syst. 2006, 21, 433–434. [Google Scholar] [CrossRef]
- Serban, I.; Teodorescu, R.; Marinescu, C. Energy storage systems impact on the short-term frequency stability of distributed autonomous microgrids, an analysis using aggregate models. IET Renew. Power Gener. 2013, 7, 531–539. [Google Scholar] [CrossRef]
- Papadimitriou, C.N.; Vovos, N.A. Transient Response Improvement of Microgrids Exploiting the Inertia of a Doubly-Fed Induction Generator (DFIG). Energies 2010, 3, 1049–1066. [Google Scholar] [CrossRef] [Green Version]
- Knap, V.; Chaudhary, S.K.; Stroe, D.-I.; Swierczynski, M.J.; Craciun, B.-I.; Teodorescu, R. Sizing of an Energy Storage System for Grid Inertial Response and Primary Frequency Reserve. IEEE Trans. Power Syst. 2016, 31, 3447–3456. [Google Scholar] [CrossRef] [Green Version]
- Amraee, T.; Darebaghi, M.G.; Soroudi, A.; Keane, A. Probabilistic under frequency load shedding considering RoCoF relays of distributed generators. IEEE Trans. Power Syst. 2018, 33, 3587–3598. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Wu, Y.; Sun, Y.; Zhang, H.; Liu, Y.; Liu, Y.; Terzija, V. Continuous Under-Frequency Load Shedding Scheme for Power System Adaptive Frequency Control. IEEE Trans. Power Syst. 2020, 35, 950–961. [Google Scholar] [CrossRef]
- Annamraju, A.; Nandiraju, S. Load Frequency Control of an Autonomous Microgrid Using Robust Fuzzy PI Controller. In Proceedings of the 2019 8th International Conference on Power Systems (ICPS), Jaipur, India, 20–22 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Das, C.; Roy, A.K.; Sinha, N. GA based frequency controller for solar thermal–diesel–wind hybrid energy generation/energy storage system. Int. J. Electr. Power Energy Syst. 2012, 43, 262–279. [Google Scholar] [CrossRef]
- Pandey, S.K.; Mohanty, S.R.; Kishor, N.; Catalão, J.P.S. Frequency regulation in hybrid power systems using particle swarm optimization and linear matrix inequalities based robust controller design. Int. J. Electr. Power Energy Syst. 2014, 63, 887–900. [Google Scholar] [CrossRef]
- El-Fergany, A.A.; El-Hameed, M.A. Efficient frequency controllers for autonomous two-area hybrid microgrid system using social-spider optimizer. IET Gener. Transm. Distrib. 2017, 11, 637–648. [Google Scholar] [CrossRef]
- Annamraju, A.; Nandiraju, S. Frequency Control in an Autonomous Two-area Hybrid Microgrid using Grasshopper Optimization based Robust PID Controller. In Proceedings of the 8th IEEE India International Conference on Power Electronics (IICPE), Jaipur, India, 13–15 December 2018; pp. 1–6. [Google Scholar]
- Shaker, H.K.; Zoghby, H.E.; Bahgat, M.E.; Abdel-Ghany, A.M. Advanced Control Techniques for an Interconnected Multi Area Power System for Load Frequency Control. In Proceedings of the 2019 21st International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 17–19 December 2019; pp. 710–715. [Google Scholar] [CrossRef]
- Liu, Y.; You, S.; Liu, Y. Study of Wind and PV Frequency Control in U.S. Power Grids—EI and TI Case Studies. IEEE Power Energy Technol. Syst. J. 2017, 4, 1–9. [Google Scholar] [CrossRef]
- Ochoa, D.; Martinez, S. Fast-Frequency Response Provided by DFIG-Wind Turbines and its Impact on the Grid. IEEE Trans. Power Syst. 2017, 32, 4002–4011. [Google Scholar] [CrossRef]
- Thorbergsson, E.; Knap, V.; Swierczynski, M.; Stroe, D.; Teodorescu, R. Primary Frequency Regulation with Li-Ion Battery Based Energy Storage System—Evaluation and Comparison of Different Control Strategies. Intelec 2013. In Proceedings of the 35th International Telecommunications Energy Conference, Smart Power and Efficiency, Hamburg, Germany, 13–17 October 2013; pp. 1–6. [Google Scholar]
- Nguyen, H.T.; Yang, G.; Nielsen, A.H.; Jensen, P.H. Combination of Synchronous Condenser and Synthetic Inertia for Frequency Stability Enhancement in Low-Inertia Systems. IEEE Trans. Sustain. Energy 2019, 10, 997–1005. [Google Scholar] [CrossRef] [Green Version]
- Rikos, E.; Cabiati, M.; Tornelli, C. Adaptive frequency containment and balance restoration controls in a distribution network. In Proceedings of the 2017 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Torino, Italy, 26–29 September 2017; pp. 1–6. [Google Scholar]
- Syed, M.H.; Guillo-Sansano, E.; Blair, S.M.; Roscoe, A.J.; Burt, G.M. A Novel Decentralized Responsibilizing Primary Frequency Control. IEEE Trans. Power Syst. 2018, 33, 3199–3201. [Google Scholar] [CrossRef] [Green Version]
- Martini, L.; Brunner, H.; Rodriguez, E.; Caerts, C.; Strasser, T.I.; Burt, G.M. Grid of the future and the need for a decentralised control architecture: The web-of-cells concept. Cired Open Access Proc. J. 2017, 2017, 1162–1166. [Google Scholar] [CrossRef] [Green Version]
- Rakhshani, E.; Gusain, D.; Sewdien, V.; Torres, J.L.R.; Van Der Meijden, M.A. A Key Performance Indicator to Assess the Frequency Stability of Wind Generation Dominated Power System. IEEE Access 2019, 7, 130957–130969. [Google Scholar] [CrossRef]
- Policy 1: Load-frequency control and performance, ENTSO-E, Continental Eur. Oper. Handbook. Tech. Rep. 2018. Available online: https://www.entsoe.eu/_leadmin/user_upload/_library/publications/entsoe/Operation_Handbook/Policy_1__nal.pdf (accessed on 10 September 2020).
- RG-CE System Protection & Dynamics Sub Group (REE, Terna, TransnetBW, 50Hertz Transmission, RTE, Swissgrid and Energinet.dk). Frequency Stability Evaluation Criteria for the Synchronous Zone of Continental Europe; ENTSO-E: Brussels, Belgium, 2016. [Google Scholar]
- Bao, W.; Zhang, X.; Zhao, L. Parameter estimation method based on parameter function surface. Sci. China Technol. Sci. 2013, 56, 1485–1498. [Google Scholar] [CrossRef]
- Pham, N.; Wilamowski, B.M. Improved Nelder Mead’s Simplex Method and Applications. J. Comput. 2011, 3, 55–63. [Google Scholar]
- Lagarias, J.C.; Reeds, J.a.; Wright, M.H.; Wright, P.E. Convergence Properties of the Nelder--Mead Simplex Method in Low Dimensions. Siam J. Optim. 1998, 9, 112–147. [Google Scholar] [CrossRef] [Green Version]
- Patsalides, M.; Efthymiou, V.; Stavrou, A.; Georghiou, G.E. A generic transient PV system model for power quality studies. Renew. Energy 2016, 89, 526–542. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Key Performance Index | ID | Name | Formula |
| 1 | Frequency Nadir | ||
| 2 | Rate of Change of Frequency (RoCoF) | [pu] |
| Nominal Capacity Per Power Source Type (MVA) | ||||||
|---|---|---|---|---|---|---|
| Scenario Cases | Solar | Wind | Hydro | Biomass | Conventional | Pump Storage |
| 2050 | 47.8 | 47.8 | 33.6 | 6.2 | 38.0 | 15.6 |
| Stability Analysis Scenarios for 2050—Loss of Generation Capacity (Affected Source Type Marked with Grey Color) | ||
|---|---|---|
| Source Type | Fault in Area 1 | Fault in Wind Station |
| Solar | 47.8 | 47.8 |
| Wind | 47.8 | 47.8 |
| Hydro | 23.5 | 23.5 |
| Biomass | 4.4 | 4.4 |
| Pumped Storage | 10.9 | 10.9 |
| Conventional | 26.6 | 26.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Patsalides, M.; Papadimitriou, C.N.; Efthymiou, V. Low Inertia Systems Frequency Variation Reduction with Fine-Tuned Smart Energy Controllers. Sustainability 2021, 13, 2979. https://doi.org/10.3390/su13052979
Patsalides M, Papadimitriou CN, Efthymiou V. Low Inertia Systems Frequency Variation Reduction with Fine-Tuned Smart Energy Controllers. Sustainability. 2021; 13(5):2979. https://doi.org/10.3390/su13052979
Chicago/Turabian StylePatsalides, Minas, Christina N. Papadimitriou, and Venizelos Efthymiou. 2021. "Low Inertia Systems Frequency Variation Reduction with Fine-Tuned Smart Energy Controllers" Sustainability 13, no. 5: 2979. https://doi.org/10.3390/su13052979
APA StylePatsalides, M., Papadimitriou, C. N., & Efthymiou, V. (2021). Low Inertia Systems Frequency Variation Reduction with Fine-Tuned Smart Energy Controllers. Sustainability, 13(5), 2979. https://doi.org/10.3390/su13052979