Abstract
Hand in hand with the increasing interest in the environment, this work puts the spotlight on ecological stability itself. The Coefficient of Ecological Stability (CES) indicates a chosen region’s stability level that may be calculated using various methodical instructions. For exact CES determination, it is necessary to divide the area of interest correctly into predefined classes and the division quality has a direct impact on the final CES value precision which presents its informative value. For CES calculations in the past, terrestrial measurements and processing were used. Regarding the new methods of spatial data acquisition such as photogrammetry or remote sensing, there comes the question of the usage of these data for secondary purposes, such as for ecology. This articles goal is to test the use of the images taken by an Unmanned Aerial Vehicle (UAV) for CES calculation. The main objective is to highlight the possibility of a UAV to measure CES without terrestrial measurements. The second objective is to compare the actual formulas for CES calculation and to observe the differences between the results from different calculations. Another aim is to show the inconsistency of calculations which lead to legislative unification. The aim is to apply a new method of CES calculation using Geographic Information System (GIS) software and modern methods of data acquisition and to point out the benefits, mainly including the time factor, which is closely related to the terrestrial geodetic measurement, when the CES value is about to be calculated for such a spacious area.
1. Introduction
The landscape represents an open-system that is the result of the natural and anthropogenic factors interactions. The natural landscape was developed by purely natural factors interactions. The cultural landscape was developed by by both the natural and anthropogenic factors interactions. The landscaping processes—biotic or abiotic, natural or anthropogenic—cause constant landscape changes; thereby from an ecological point of view they immediately influence the landscape stability, thus, the ecosystems ability to return to its dynamic balance or its “normal” development direction, by means of its own internal mechanisms. Many methodological instruments, (most of which are based on the CES calculation), have been created to express the ecological stability level of a chosen region. The CES represents a numerical value, on which the basis of the region is classified in a certain ecological stability level. In the territory of the Slovak republic within the landscape of this ecological research, the areas with various ecological stability levels are being defined [,,,]. The many ways to calculate CES in Slovakia are presented in the literature and review section [,,,,]. This section has the aim of highlighting the inconsistency of legislation within this scientific field. The correct CES determines states—either by fitting the ecological stability of the locality or becoming a motivation for the locality remediation (simple landscaping, biocorridor creation, anti-erosion remedies, windshield installing etc.). For the CES calculation in the past, the terrestrial measuring methods were used, but in terms of the size of the measured territory and measuring conditions, these terrestrial methods are costly and time-consuming and they often presented the most complicated part of the CES calculation. These reasons, go hand in hand with the progress of the data acquisition methods, and predetermine the modern technology output data to become respectively, better methods to be applied in the CES calculation. In accordance with the proper conditions defined during the data acquisition (a season = vegetation color, midday = the smallest shadows, camera = an image resolution quality etc.) The data processing may be automatized without significant final CES quality degradation [,,]. After the correct flight over the area of interest and taking the images, the set of georeferenced orthophoto-images is created. These form an orthophotomap [,,]. The articles aim is to test the Unmanned Aerial Vehicle (UAV) suitability for the CES calculation needs.
2. Literature and Review
To express a certain regions ecological stability level, many tools have been created, from which the major part is based on the CES calculation [,,]. The CES presents the numerical value, on which the basis of the region is classified to a certain ecological stability level. The landscape ecological stability interval is usually divided into 3 to 5 levels:
- (a)
- Very low ecological stability,
- (b)
- Low ecological stability,
- (c)
- Medium ecological stability,
- (d)
- High ecological stability,
- (e)
- Very high ecological stability.
For a very long time, the CES determination was taken as an academic issue, that did not have a serious impact in practice. However, at present the CES represents the key element for the correction drafting within the landscape and resulted in the ecological stability of the local area in the landscaping projects. Therefore, the CES calculation was advanced to the practical level. That lead to the need to create the tools for the CES determination, in both the low and high processing values. With accuracy applied to the landscape and its features, as much as possible. According to the practice of applying a uniform method to the landscape CES calculation, in practice amongst other things, the data and spatial compatibility will be secured. Based on the method of a uniform set of landscape ecological stability, the natural territory comparison and purposeful merging of smaller territorial units into the larger ones (cadastral territories to microregions, regions etc.) is possible. At present, various methodological techniques are set for the determination of the ecological stability level value.
The CES Calculation Analysis in Accordance with the Chosen Authors
For the determination of the CES—the relatively simple indicator of the landscape ecological stability—three basic calculation methods are used, based on the work of Míchal, Löw and Miklós.
The landscape CES1 calculation according to Míchal []:
The calculation formula is:
where S represents the relatively stable areas (forest, non-forest wood vegetation, meadows, pastures) and L represents the relatively unstable areas (arable land, built-up area). The CES values are interpreted according to following in the Table 1:

Table 1.
Coefficient of Ecological Stability (CES)1 value interpretation according to Míchal [].
The landscape CES2 calculation according to Löw et al. []:
The calculation formula is:
where:
A—the area with the 5. ecological quality level in % (forest, water surface)
B—the area with the 4. ecological quality level in % (riparian vegetation, draws)
C—the area with the 3. ecological quality level in % (meadows and pastures)
D—the area with the 2. ecological quality level in % (arable land)
E—the area with the 1. ecological quality level in % (built-up areas)
The calculation interpretation is following according to the Table 2:
Table 2.
CES2 interpretation according to Löw [].
The landscape-ecological magnitude according to Miklós []:
From the ecological point of view, Miklós considers the territories with the largest landscape-ecological magnitude ratio to dispose the highest quality. The calculation formula is:
where:
pi—the area of a single landscape feature
kpi—the ecological magnitude coefficient of a landscape feature
p—total area
n—number of features in a cadastral territory
The landscape-ecological magnitude coefficient of a landscape feature (see Table 3 below):
Table 3.
The landscape-ecological magnitude coefficient value for the landscape features [].
According to this calculation method, the observed landscape, respectively territories of interest are being categorized as (see in the Table 4 below):
Table 4.
CES3 interpretation according to Miklós [].
It is common for all of the CES calculation methods to take the evaluated landscape features ecological stability and the anthropogenic influence on these features into consideration. The rating is arrived at by the methodological guidelines on documents elaboration from the “RTSES” (Regional Territorial System of Ecological stability)—Slovak Environment Agency (Banská Bystrica 2014):
From the point of view of ecological stability, the 6-level scale for evaluating landscapes in the field of ecological stability may be used within the current landscape structures and features rating []. The scale for evaluating current landscape structural features of landscape segments (Table 5):
Table 5.
The scale for evaluating current landscape structure features importance of landscape segments.
According to the Act of the National Council of the Slovak republic No. 162/1995 Coll. on the Real Estate Cadaster and on the registration of ownership and other rights to real estate (Cadastral Act) as amended, §9 the current landscape structural features are divided into the following land types:
- (a)
- Arable land,
- (b)
- Hops,
- (c)
- Vineyard,
- (d)
- Gardens,
- (e)
- Fruit orchards,
- (f)
- Permanent grasslands,
- (g)
- Forest land,
- (h)
- Water surfaces,
- (i)
- Built-up areas and courtyards,
- (j)
- Other lands.
Within the RTSES documents processing, the calculation formula for CES is following:
Pi—a single land type area (all landscape structure features area with identical biotic stability level)
Si—a single land type stability level
Pz—a basic territorial unit area (municipalities boundary)
The result represents the ecological stability rating according to the examined territory individual municipalities (basic territorial units) CES4 defined in the Table 6 below:
Table 6.
The ecological stability rating according to the examined territory individual municipalities (basic territorial units) CES4.
3. Materials and Methods
As mentioned above, it is necessary to know the relatively exact area and all of the landscape features for the CES calculation. The most appropriate CES calculation test is to apply UAV methods and their following post processing in the measured landscape [,,,].
3.1. Locality
When the locality of interest is about to be chosen, a landscape with wide ranging features would be an appropriate choice []. A landscape part spectrum (an open country, forest areas, low built-up areas, habitation) is an ideal choice for the orthophoto-images post processing method for the working environment testing. Accordingly, the wider Solinky surroundings, which form the southern part of Žilina, were chosen. The measured area boundaries were defined as the main settlement catchment area. We may understand the settlement itself and the chosen non-urban part that has been traditionally connected with the settlement, under this term. The settlement extent and dimensions are adequate for the research purposes for the modern data acquisition and postprocessing testing. In the Figure 1, the basic examined landscape features are depicted based on their use/purpose(s). The examined area includes several landscape features or types, starting with the high built-up areas, segment A (determined by boundaries of the housing estate) represents the settlement itself. The less built-up areas represented by the suburbs, segment D (determined by boundaries of cadastral area), respectively by the gardening areas. Segment E (defined by boundaries of area used for gardening in cadaster of real estates) and various natural feature types used for recreational and agricultural purposes, segments B, C and F (differenced visually for segments B and C and by the boundaries of agricultural usage for segment F). The single segments purpose and percentage are stated in the Table 7 a graphically depicted in the Figure 2.

Figure 1.
The segments purposes, graphic depiction. Source: Authors. (A–F see above)
Table 7.
The examined locality segments types, description and percentage area.
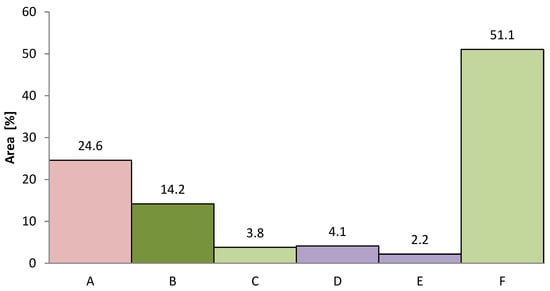
Figure 2.
The examined locality segments types area ratio. Source: Authors.
The examined locality overall area was 244.2 ha. For the following processing purposes, the correct measuring way and Unmanned Aerial Vehicle (UAV) method is necessary. The measuring method and measured data processing is listed in the following chapter section.
3.2. Aerial Photogrammetry by UAV
In the process of creating a detailed orthographic photograph of the earth’s surface were used only aircrafts. With the current trend of using Unmanned Aerial Vehicles (UAVs) in various applications, unmanned aerial vehicles have found application in this area as well []. For the purpose of research and experiment was used UAV DJi Mavic Pro. The experiment consisted of the following phases:
- Definition of the scanned area and orographic situation,
- Definition of way points (Figure 3—left),
 Figure 3. Comparison of the Unmanned Aerial Vehicle (UAV) flight plan (left) with an overview of the recording positions of the images in the given area (right). Source: Authors.
Figure 3. Comparison of the Unmanned Aerial Vehicle (UAV) flight plan (left) with an overview of the recording positions of the images in the given area (right). Source: Authors. - Pre-flight preparation,
- The experiment itself,
- Flight data analysis (Figure 3—right).
The flights were flown in the controlled area of Žilina Airport (LZZI) at a time when the area is in the category ATZ (Aerodrome Traffic Zone) and outside the descent planes GNSS [], and ILS approach and within the applicable rules of flying and safety procedures [] with UAV according to Decision no. 2/2019 of 14 November 2019. The front image overlaps of 75% and side overlaps of 65% were used in the imaging, the imaging speed was set to 8 m·s−1. The total flight altitude was 120 m AGL (Above Ground Level) with direct visual contact of the operator. The total flight time was 27 min, during which 2 batteries were used, 487 photos were taken and an area of 115 acres (0.46 square kilometers) was covered.
For images collection was used default camera of DJI Mavic pro drone with following parameters:
- Sensor: 1/2.3” (CMOS), Effective pixels: 12.35 M (Total pixels:12.71 M),
- Lens: FOV 78.8° 26 mm (35 mm format equivalent) f/2.2, distortion < 1.5% Focus from 0.5 m to ∞,
- ISO Range: video: 100–3200, photo: 100–1600,
- Image Size: 4000 × 3000.
The total resolution while maintaining the current flight parameters was 3.3 cm of real distance in the image per pixel. In terms of the selection of the season and time during the day for the implementation of the flight plan [], the period was selected according to the following parameters. The first most important parameter was imaging with the elimination of shadows [] from buildings and vegetation. This fact could be avoided by two factors. By choosing a period with the sun as high as possible above the horizon and choosing light meteorological conditions. Aerial photography close to the date of the longest day provided optimal conditions. In terms of meteorological influence, the day was chosen when there were high cirrus cloud conditions in the sky. The cloud type provided lighting conditions and light diffusion that produced softer shadows than on a clear day. In addition to meteorological conditions and forecast [] for chosen landscape area, the level of developed vegetation in the period without flowers and with leaves was also taken into account. The last factor was the period between precipitation and severe drought. It was the extremes in the supply of water to the ecosystem that caused problems in the subsequent evaluation of the area. One extreme was the formation of soaked soil [] and the other was the sore dry vegetation. Both cases belong to an environment with vegetation, but by their nature during the evaluation they would be included in an area without vegetation.
To complete the whole area of research, aerial work has been divided into two polygons. The first polygon was described in Figure 3 and its parameters were defined above. Due to the area of the second polygon (Figure 4), its relief and character, the flight and imaging conditions were adapted to the total flight time. While in the polygon covering the built-up area, the flight altitude was set to 120 m (AGL); when shooting the current polygon, it was 150 m (AGL). Again, all safety conditions were observed during the shooting in accordance with Regulation 2/2019 of the Transport Office of the Slovak Republic in the current conditions of ATZ (Aerodrome Traffic Zone) Žilina. The total aerial photography time of the second polygon was 58 min and a total of 4 batteries were used. The current area was recorded on 1159 images. The resolution of the polygon with the given parameters and a side overlap of 65% and a front overlap of 75% was 2.5 cm per pixel.
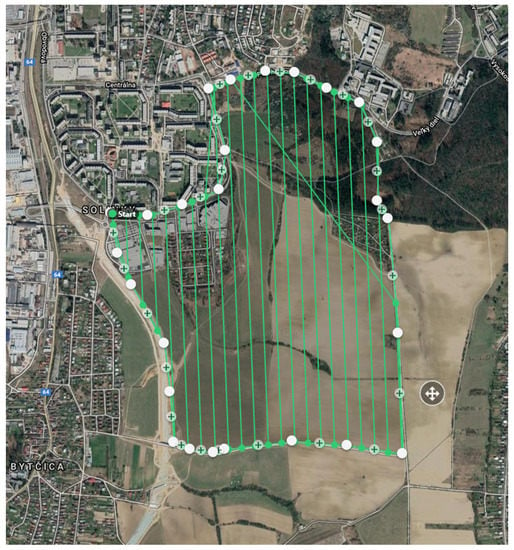
Figure 4.
Design of an additional polygon with the creation of a UAV flight path for aerial photography Source: Authors.
The final clipped area used in the next sections is displayed on the Figure 5.

Figure 5.
Examined measured locality.
3.3. Postprocessing
The post processing contains various steps. The sample of postprocessing is presented in Figure 6 and it includes steps such as definition of location, which is measured (in our case using the UAV method), the final data must be edited and corrected, for next usage it has to be georeferenced [,,,]. After the preprocessing, data are able to be used for the aims, that are described below.

Figure 6.
The processing and analysis map.
After the flight over the area, images processing and orthophoto-images creation, the orthophoto-images were used as the base for the next calculations. Individual orthophoto-images were reclassified in the program ArcMap environment using the toolbar Image Classification, specifically ISO Cluster Unsupervised Classification, as it meets our requirements for the locality of interest orthophoto-images division in the best way. For correct elimination of graphic errors such as shadows, before Cluster Unsupervised Classification, Principal Component was used.
The Principal Components tool is used to transform the data in the input bands from the input multivariate attribute space to a new multivariate attribute space whose axes are rotated with respect to the original space. The axes (attributed) in the new space are uncorrelated. The main reason to transform the data in a principal component analysis is to compress data by eliminating redundancy [,,]. The result of using the tool is a multiband raster with the same number of bands as the specified number of components (one band per axis or component in the new multivariate space). The first principal component will have the greatest variance, the second will show the second most variance not described by the first, and so forth. Principal Components requires the input bands to be identified, the number of principal components into which to transform the data, the name of the statistics output file, and the name of the output raster []. The output raster will contain the same number of bands as the specified number of components. The number of components is the same number mentioned earlier. Each band will depict a component [].
The result of the Principal Components reclassification (post-processing) is displayed in Figure 7. Without any other necessary editing it there is possible to see the differences between basic landscape structures such as built-up areas (mostly in yellow), permanent grasslands (mostly in blue), forest areas (mostly in green) and arable areas (mostly in purple).

Figure 7.
Post-processed orthophoto-image of examined locality.
ISO Cluster Unsupervised Classification performs the reclassification of the input orthophoto-image using the Maximum Likelihood Classification tools. This algorithm is based on two principles: The cells in each class sample in the multidimensional space being normally distributed Bayes’ theorem of decision making []. To assign each cell to one of the classes the tool takes into consideration both the variances and covariances of the class signatures. If the distribution of a class sample is normal, a class can be characterized by the mean vector and the covariance matrix. These conditions enable determination of the cells membership to the class.
Within the ISO Cluster Unsupervised Classification application in the ArcMap environment [] after choosing the georeferenced orthophoto-image [,], it is necessary to define the number of classes into which the orthophoto-image is about to be classified. The Minimum class size which defines the minimum number of cells in a valid class must be predefined too, together with the Sample interval. This is an interval used for sampling. The number of the intervals within the postprocessing of every single orthophoto-image had to be adopted according to the orthophoto-image content []. During the postprocessing the orthophoto-image was divided into the irregular shapes which delimit the landscape structure type. For explanation, in the section formed by the housing development with various roof types, respectively with the various facade color solutions, the misinterpretation may have occurred according to the wrong class determination as it is automatized. If low numbers of classes were used, some valuable structures could fade away in the settlement territory. In the Figure 8, the reclassified classes of the segment F are possible to be seen. After many experiments the most appropriate number of reclassified classes for built-up areas is 50 and for mostly monocultural areas is 25. The orthopohoto reclassification into four basic landscape structures is displayed in the Figure 9.

Figure 8.
The orthophoto-image classification illustration. Every segment is divided into 50 groups for built-up areas and into 25 groups for mostly monocultural areas. These groups have to be reclassified into new groups, which present the landscape structure categories, possible to be used in CES calculation formulas. In our case, we only used four categories. Built-up areas include blocks of flats, family houses, cottages, civic amenities (church, shopping centers, shops, pump stations, post-offices, etc.), roads and paths. A meadow category includes temporary grasslands, loans and the parts of parks without high vegetation. Forest areas include all high vegetation parts in the examined area. According to the mixed forest [] occurrence and the current impossibility of better identification of tree types, areas were unified and their index was in some formulas predefined. In cases, where different tree types categories had various index, this index was replaced by their average. Arable areas are determined by areas used for various agricultural purposes [], this category occurs only in segment F. Below it is possible to see the examined locality reclassification, mango color for built-up areas, fern green for temporary grasslands, malachite green for forest and grey for arable areas. Due to the raster definition (size and type), the various areas calculations depend only on the number of pixels with same value as the areas have. The calculation may be managed in whole examined areas or in single segments.

Figure 9.
The orthophoto-image reclassified into four basic landscape structures (mango color—built-up areas, fern green—temporary grasslands, malachite green—forest and gray—arable areas).
According to the reclassification into four basic landscape structures, the area of each land structure was calculated and graphical displayed in the Figure 10. The last step of the post image processing is the calculation of index CES, not only for whole examined area, but also in the separate segments The pixel classification was used due to working with UAV data presented by the orthophoto-image. For the first CES formula, there are no values for the categories, they are only divided into two groups, one is in final calculation the numerator, the other is the denominator, the final CES index presents the ratio of focused area. The index may reach values from 0 up to infinity. For the second CES formula, indexes for single landscape type structures were given as 0.20 for arable areas, 0.50 for temporary grasslands, 0.80 for built-up areas and 1.50 for forest areas. In this calculation, the areas percentage values are necessary. The CES2 values may reach up to infinity as well. Within the CES3 calculation, the index for temporary grasslands had to be classified differently for segments A, D, E, where its value was 0.50 which presents garden areas and in segments B, F the index value was 0.62 which presents meadows. The overall CES3 value of examined locality was calculated as weighted arithmetic mean presented by value 0.59 for temporary grasslands. The index value for built-up areas was given as 0.00. for arable areas 0.14. In the CES3 calculation, the index value for forest lands was given as 0.63 according to the tree types predominance in the examined areas. Within the CES4 calculation, the built-up areas are defined as areas with no importance with index 0.00. The index value for arable areas was set as 1.50 that represents the compromise between the areas with low and very low importance. There is not a clearly defined area which can be called a small or large arable land. The index value for meadows is set as 3.00 and for forest areas 4.00 whereas the trees creating forests cannot be defined as natural with index 5.00.
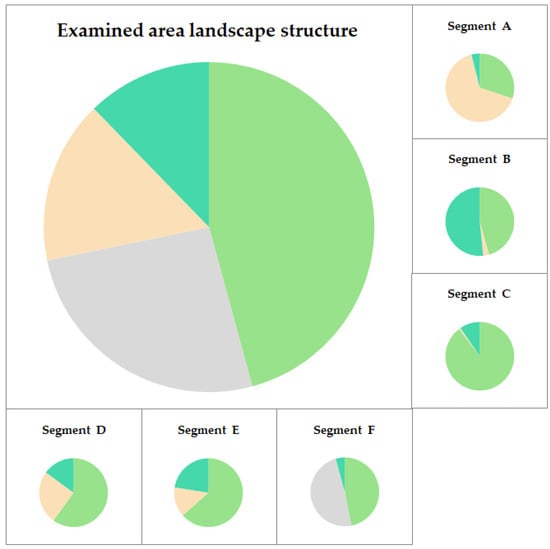
Figure 10.
The examined area landscape structure (mango color—built-up areas, fern green—temporary grasslands, malachite green—forest and gray—arable areas).
According to the CES calculations using various formulas, single segments reached different CES values, which are object of interpretation. The final CES values are shown in the Table 8 below.
Table 8.
Final CES values of examined area and single segments.
4. Results Interpretation
The CES1 points out that segment A, represented by a highly built-up area, is defined as a territory intensively used for mainly large-scale agricultural production []; weakened auto-regulatory processes cause a certain ecological lability and all other segments, as well as the whole examined area, can be defined as an almost balanced landscape where the technical objects are relatively in accordance with the preserved natural structures according to Míchal []. After the calculation of CES2, the interpretation is following: segment A is defined as a disturbed landscape, segments D, E, F represent landscapes with dominant natural features, segments B and C may be called natural landscapes, i.e., landscapes close to nature. The whole examined area may be presented as a landscape with dominant natural features. Interpretation based on CES3 calculation defines segments A and F as unstable landscapes, segments D and E as low stable landscapes and segments B and C as medium stable landscape. The whole examined area is also defined as low stable landscape. Due to CES4 calculation, segment A is classified as a low ecological stability area with definitions according to Pinto [], segments D, E, F as medium ecological stability areas and segments B and C as high ecological stability area. The whole examined area is defined as medium ecological stability area.
5. Discussion
According to the above-mentioned calculation results, the CES index calculated based on various author philosophy, segment A represents an area with low ecological stability. In accordance with other authors, the definition is different, but the result is in principle the same. Segment A, separately, may be defined as an unstable area. If the other segments with temporary grasslands and forests in close proximity were not taken into consideration, then segment A would represent an area inappropriate for a high quality and healthy lifestyle, and this fact leads to discussion about the simple land adaptation or another types of landscape remediation. From a wider point of view, the whole examined area is mostly interpreted as a kind of landscape with medium ecological stability index. Segments B and C have the best results and are the reasons the index increases in every CES calculation. CES3 deserves extra attention, whereas it rates the examined areas in the most critical way. It is the only qualification, that presents segment F as the same unstable area as the high built-up area A. There are also the biggest differences between this type of CES calculation and the others. The question is, which CES calculation is the correct one or captures the ecological stability as realistic as possible?
The aim of this paper was to demonstrate the possible use of UAV’s for CES calculation. This kind of calculation has never been used in this way. CES’s can be calculated from orthophoto-images and this fact makes calculations of CES without terrestrial method possible. This makes the calculations faster and more accessible when there are no terrestrial data sets that can make simple land adaptation less difficult and faster. This may be helpful in the moment of increasing the number of active simple land adaptations.
There are future plans for the study, to apply the possibilities of UAV data usage for CES calculation, due to the different character of wood during the year (such as determination of wood by deciduous trees and evergreen trees or Beeches that are also deciduous, but they only change the color of their leaves). The character of trees has also an impact on CES quality. A future study is going to focus on other areas, not only city areas but villages as well. The results of the research are going to be the basis for simple land adaptations and are also for future ecological and forestry issues.
6. Conclusions
This paper focuses on ecological stability of the landscape. The first part is devoted to legal legislation in this field and points out the different views for various authors to CES calculation. CES indexes presents ecological stability level and various authors show different ways of its calculation and interpretation. The question of correct calculation does not depend only on correct formula but also on the examined area borders and definition. In the case of choosing only strict urban area borders (represented in the paper by segment A), the result would define the examined area as ecological unstable but with different point of view, whereas the wider surroundings are taken into consideration (represented in paper by segments B–F), the results may change and the final CES value would define the examined area as more stable landscape. Additionally, the correct flight may lighten the postprocessing calculations. A flight at the correct time and conditions may avoid many complications. The complications may be represented by presence of shadows, the incorrect vegetation color (deciduous trees without leaves) which is also connected with the seasons, backsides of high buildings, inappropriate daylight during the flight. Another example of weather influence (puddles and mud after long-term rains). The method of using UAV’s in the case of imaging a small area of polygons was much more effective than with the use of civil aircraft. From the point of view of using resources to place the camera in the required flight level and path, this is an incomparably less demanding method. We are talking not only about the financing of aerial work, but also about human resources, fuel and operating costs and, last but not least, the provision of airworthiness management and maintenance []. Due to the considerable number of advantages, this study is an advocate of UAV use in specific situations. The use of unmanned aerial vehicles is particularly useful for smaller polygons and in areas where high mapping accuracy is required. In the case of scanning larger areas such as forests or large cities, a method of aerial photography from civil aircraft would be more effective. A number of advantages also include the disadvantages of using unmanned aerial vehicles, such as the risk of loss of signal and thus loss of the entire equipment, collision with ground objects and greater sensitivity to weather conditions. With the growing trend of implementing new technologies, the application of UAVs for the given purposes of orthographic imaging would not have been possible in the past. From the point of view of efficient use of resources, however, the given imaging was suitable and much simpler due to the above-mentioned criteria for the use of unmanned aerial vehicles and civil aircraft.
The correct interpretation does not depend only on precise borders definition but also on the correct CES index calculation formula used. The differences between the calculations according to the various formulas show the disunity of CES index interpretations and should be discussed with specialists from the related fields. The way forward is to choose the proper CES index qualification or to define new ways of CES determination.
Author Contributions
Conceptualization, J.C., and D.B., P.P.; methodology, A.S.; software, J.C., D.B.; validation, P.P., A.S. and J.C.; formal analysis, J.C.; investigation, P.P.; resources, A.S.; data curation, P.P.; writing—original draft preparation, J.C. and D.B.; writing—review and editing, J.C. and D.B.; visualization, J.C. and D.B.; supervision, A.S.; project administration, P.P. and J.C.; funding acquisition, J.C. and P.P. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data available in a publicly accessible repository. The data presented in this study are openly available in [Sustainability] at [https://doi.org/10.3390/su13063017], reference number [10.3390/su13063017].
Acknowledgments
This article is the result of the implementation of the project VEGA 1/0275/17 “Application of numerical methods to define the changes of geometrical track position”, supported by the Scientific Grant Agency of the Ministry of Education, Science, Research and Sport of the Slovak Republic and Slovak Academy of Sciences. This article is the result of the implementation of the project ITMS 26220220156 “Broker centre of air transport for transfer of technology and knowledge into transport and transport infrastructure”, supported by the Research & Development Operational Programme funded by the ERDF.
Conflicts of Interest
The authors declare that there are no conflict of interest.
References
- Reháčková, T.; Pauditšová, E. Metodický postup stanovenia koeficientu ekologickej stability krajiny. Acta Environ. Univ. Comen. (Bratisl.) 2007, 15, 26–38. [Google Scholar]
- Lauko, P.; Korec, P. Všeobecné Zásady Funkčného Usporiadania Územia v Obvode Projektu Pozemkových Úprav; Geometra Levice: Nitra, Slovakia, 2009; p. 79. [Google Scholar]
- Muchová, Z.; Vanek, J. Metodické Štandardy Projektovania Pozemkových Úprav, 1st ed.; SPU v Nitre v Spolupráci s MP SR: Nitra, Slovakia, 2009. [Google Scholar]
- Ivan, P.; Vojtková, J.; Kráľová, J.; Klinčoková, K. Analýza Metodických Postupov Výpočtu Ekologickej Stability, Aktuálne Problémy Krajinnej Architektúry a Krajinného Plánovania; STU: Bratislava, Slovakia, 2013. [Google Scholar]
- Löw, J. Rukověť Projektanta Místního Územního Systému Ekologické Stability; Doplňek: Brno, Czechia, 1995; p. 122. [Google Scholar]
- Izakovičová, Z.; Miklós, L.; Drdoš, J. Krajinnoekologické Podmienky Trvalo Udržateľného Rozvoja; VEDA: Bratislava, Slovakia, 1997; p. 186. [Google Scholar]
- Míchal, I. Ekologická Stabilita; Veronica: Brno, Czechia, 1992; p. 244. [Google Scholar]
- László, M. Stabilita Krajiny v Ekologickom Genereli SSR; Životné Prostredie; ÚKE SAV: Bratislava, Slovakia, 1986; Volume 20, pp. 87–93. [Google Scholar]
- Mu, B.; Liu, C.; Tian, G.; Xu, Y.; Zhang, Y.; Mayer, A.L.; Lv, R.; He, R.; Kim, G. Conceptual Planning of Urban–Rural Green Space from a Multidimensional Perspective: A Case Study of Zhengzhou, China. Sustainability 2020, 12, 2863. [Google Scholar] [CrossRef]
- Parlavecchia, M.; Pascuzzi, S.; Anifantis, A.S.; Santoro, F.; Ruggiero, G. Use of GIS to Evaluate Minor Rural Buildings Distribution Compared to the Communication Routes in a Part of the Apulian Territory (Southern Italy). Sustainability 2019, 11, 4700. [Google Scholar] [CrossRef]
- Flowers, B.; Huang, K.-T.; Aldana, G.O. Analysis of the Habitat Fragmentation of Ecosystems in Belize Using Landscape Metrics. Sustainability 2020, 12, 3024. [Google Scholar] [CrossRef]
- Chen, Y.; Zheng, B.; Hu, Y. Mapping Local Climate Zones Using ArcGIS-Based Method and Exploring Land Surface Temperature Characteristics in Chenzhou, China. Sustainability 2020, 12, 2974. [Google Scholar] [CrossRef]
- Zaki, S.A.; Othman, N.E.; Syahidah, S.W.; Yakub, F.; Muhammad-Sukki, F.; Ardila-Rey, J.A.; Shahidan, M.F.; Mohd Saudi, A.S. Effects of Urban Morphology on Microclimate Parameters in an Urban University Campus. Sustainability 2020, 12, 2962. [Google Scholar] [CrossRef]
- Couto, E.V.; Oliveira, P.B.; Vieira, L.M.; Schmitz, M.H.; Ferreira, J.H.D. Integrating Environmental, Geographical and Social Data to Assess Sustainability in Hydrographic Basins: The ESI Approach. Sustainability 2020, 12, 3057. [Google Scholar] [CrossRef]
- Rüdisser, J.; Leitinger, G.; Schirpke, U. Application of the Ecosystem Service Concept in Social–Ecological Systems—From Theory to Practice. Sustainability 2020, 12, 2960. [Google Scholar] [CrossRef]
- Peano, C.; Massaglia, S.; Ghisalberti, C.; Sottile, F. Pathways for the Amplification of Agroecology in African Sustainable Urban Agriculture. Sustainability 2020, 12, 2718. [Google Scholar] [CrossRef]
- Aktsoglou, D.; Gaidajis, G. Environmental Sustainability Assessment of Spatial Entities with Anthropogenic Activities-Evaluation of Existing Methods. Sustainability 2020, 12, 2680. [Google Scholar] [CrossRef]
- Persson, J.; Blennow, K.; Gonçalves, L.; Borys, A.; Dutcă, I.; Hynynen, J.; Janeczko, E.; Lyubenova, M.; Martel, S.; Merganic, J.; et al. No polarization–Expected Values of Climate Change Impacts among European Forest Professionals and Scientists. Sustainability 2020, 12, 2659. [Google Scholar] [CrossRef]
- Dumieński, G.; Mruklik, A.; Tiukało, A.; Bedryj, M. The Comparative Analysis of the Adaptability Level of Municipalities in the Nysa Kłodzka Sub-Basin to Flood Hazard. Sustainability 2020, 12, 3003. [Google Scholar] [CrossRef]
- Pecho, P.; Skvarekova, I.; Azaltovic, V.; Bugaj, M. UAV usage in the process of creating 3D maps by RGB spectrum. Transp. Res. Procedia 2019, 43, 328–333. [Google Scholar] [CrossRef]
- Novak, A.; Skultety, F.; Kandera, B.; Łusiak, T. Measuring and Testing Area Navigation Procedures with GNSS. MATEC Web Conf. 2018, 236, 01004. [Google Scholar] [CrossRef][Green Version]
- Skultety, F.; Badánik, B.; Bartoš, M.; Kandera, B. Design of controllable unmanned rescue parachute wing. Transp. Res. Procedia 2018, 35, 220–229. [Google Scholar] [CrossRef]
- Tu, Y.-H.; Phinn, S.; Johansen, K.; Robson, A.; Wu, D. Optimising Drone Flight Planning for Measuring Horticultural Tree Crop Structure. ISPRS J. Photogramm. Remote Sens. 2020, 160, 83–96. [Google Scholar] [CrossRef]
- Iqbal, I.A.; Musk, R.A.; Osborn, J.; Stone, C.; Lucieer, A. A Comparison of Area-Based Forest Attributes Derived from Airborne Laser Scanner, Small-Format and Medium-Format Digital Aerial Photography. Int. J. Appl. Earth Obs. Geoinf. 2019, 76, 231–241. [Google Scholar] [CrossRef]
- Taszarek, M.; Kendzierski, S.; Pilguj, N. Hazardous Weather Affecting European Airports: Climatological Estimates of Situations with Limited Visibility, Thunderstorm, Low-Level Wind Shear and Snowfall from ERA5. Weather Clim. Extrem. 2020, 28, 100243. [Google Scholar] [CrossRef]
- Cortesi, I.; Ferretti, L.V.; Morgia, F. Soil and Water as Resources: How Landscape Architecture Reclaims Hydric Contaminated Soil for Public Uses in Urban Settlements. Sustainability 2020, 12, 8840. [Google Scholar] [CrossRef]
- Cardeal, G.; Höse, K.; Ribeiro, I.; Götze, U. Sustainable Business Models–Canvas for Sustainability, Evaluation Method, and Their Application to Additive Manufacturing in Aircraft Maintenance. Sustainability 2020, 12, 9130. [Google Scholar] [CrossRef]
- Serrano Giné, D.; Pérez Albert, M.Y.; Àvila Callau, A.; Jurado Rota, J. Dataset on Georeferenced and Tagged Photographs for Ecosystem Services Assessment, Ebro Delta, N-E Spain. Data Brief 2020, 29, 105178. [Google Scholar] [CrossRef]
- Yu, M.; Huang, Y.; Cheng, X.; Tian, J. An ArcMap Plug-in for Calculating Landscape Metrics of Vector Data. Ecol. Inform. 2019, 50, 207–219. [Google Scholar] [CrossRef]
- Chen, J.; Liu, D.; Li, S.; Hu, D. Registering Georeferenced Photos to a Building Information Model to Extract Structures of Interest. Adv. Eng. Inform. 2019, 42, 100937. [Google Scholar] [CrossRef]
- Arcmap Online. Available online: https://desktop.arcgis.com/en/arcmap/10.3/tools/spatial-analyst-toolbox/iso-cluster-unsupervised-classification.htm (accessed on 20 December 2020).
- Xu, Z.; Shen, X.; Cao, L.; Coops, N.C.; Goodbody, T.R.H.; Zhong, T.; Zhao, W.; Sun, Q.; Ba, S.; Zhang, Z.; et al. Tree Species Classification Using UAS-Based Digital Aerial Photogrammetry Point Clouds and Multispectral Imageries in Subtropical Natural Forests. Int. J. Appl. Earth Obs. Geoinf. 2020, 92, 102173. [Google Scholar] [CrossRef]
- Ren, Z.; Zhan, W.; Yue, Q.; He, J. Prioritizing Agricultural Patches for Reforestation to Improve Connectivity of Habitat Conservation Areas: A Guide to Grain-to-Green Project. Sustainability 2020, 12, 9128. [Google Scholar] [CrossRef]
- Hong, C.; Jin, X.; Ren, J.; Gu, Z.; Zhou, Y. Satellite Data Indicates Multidimensional Variation of Agricultural Production in Land Consolidation Area. Sci. Total Environ. 2019, 653, 735–747. [Google Scholar] [CrossRef]
- Pinto, L.F.R.; Venturini, G.d.F.P.; Digiesi, S.; Facchini, F.; Oliveira Neto, G.C.d. Sustainability Assessment in Manufacturing under a Strong Sustainability Perspective—An Ecological Neutrality Initiative. Sustainability 2020, 12, 9232. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).