Abstract
Urban traffic can be curbed in various ways, for instance, by introducing paid unguarded parking zones (PUPZ). The operational functionality of this system depends on whether or not the various system features used to document parking cases function properly, including those which enable positioning of vehicles parked in the PUPZ, recognition of plate numbers, event time recording, and the correct anonymisation of persons and other vehicles. The most fundamental problem of this system is its reliability, understood as the conformity of control results with the actual state of matters. This characteristic can be studied empirically, and this article addresses the methodology proposed for such an examination, discussed against a case study. The authors have analysed the statistical dependence of the e-control system’s measurement errors based on operational data. The results of this analysis confirm the rationale behind the deployment of the e-control system under the implementation of the smart city concept in Warsaw.
1. Introduction
One of the problems facing contemporary cities in their pursuit of development is the growing number of vehicles parked in city centres or in districts directly adjacent to them. Based on the research to date, it is estimated that ca. 30% of traffic volume is attributable to the vehicles driven by people looking for parking places [1,2]. This contributes not only to the time loss on account of the difficulty in finding a parking place, but also to the deterioration of the environmental conditions in the city [3] due to reasons such as exhaust emissions. Congestion of the main city arteries extends the time needed by inhabitants to arrive at workplaces and exerts negative financial effects on transport companies, caused, for instance, by delays in the delivery of goods. Parking is a critical infrastructure component in terms of accessibility. Research shows the influence of a place to park, the travel time [4], and distance from the destination (especially in the case of a limited number of parking spaces [5]) on the decision to own your own car [6].
Striving to solve this problem, municipalities implement diverse technologies aligned with the smart city concept. One of the solutions that facilitates finding parking places involves using parking place monitoring and detection systems interfaced with mobile applications [7,8,9]. Another solution is more complex, as it consists of the parallel expansion and integration of the modes of collective public transport (Mobility as a Service, MaaS) along with discouraging individual drivers from using their vehicles by reducing the number of parking places available to them and introducing high fees on vehicle parking in individual city zones.
An important element of this concept is a fully automated parking enforcement procedure. There are numerous solutions applied in this respect, including those based on the ITS (Intelligent Transportation Systems) concept and the stationary SEG-A system [10], only recently implemented in the cities of Rzeszów and Bydgoszcz (Poland), as well as some mobile solutions known worldwide, e.g., those deployed in Prague (Czech Republic) [11] and lately also in Warsaw [12]. There are numerous providers of mobile parking enforcement systems currently operating worldwide [13,14,15,16].
The solution implemented in Warsaw is commonly referred to as e-control and is provided by SmartFactor [17]. In operation, this system makes the most of state-of-the-art IT technologies, such as machine vision [18], Internet of things (IoT) [19,20,21,22], advanced number plate detection algorithms [23,24], and plate number identification using selected machine learning components [24,25]. The system also uses different types of highly advanced measuring sensors, which enable determination of the distance to a parked vehicle by means of a lidar [26,27,28,29] or high-precision readout of GPS coordinates in order to establish the location [30,31] and date of the given control procedure. Recording the very fact that a vehicle has been parked within a paid parking zone initiates the process of verification of whether the fee due has been settled; this may entail some additional charges, such as a fine, if the parking fee has not been cleared.
Therefore, the quality and reliability of the e-control system’s operation is crucial in the paid parking zone management process. What proves to be a significant problem in this respect is how to assess the reliability of the system’s operational functionality (understood as the capacity to receive control results that are consistent with the actual state of matters and to meet the pre-assumed technical conditions). This problem can be studied empirically based on data provided by in-service measurements, and this article addresses the methodology proposed for such an examination, discussed against a case study. Authors of papers [32,33] have discussed a similar, yet not identical, methodology of experimental study. To illustrate the practical application of the methodology in question, the authors analysed the statistical dependence of the measurement errors produced by the e-control system implemented in Warsaw based on its operational data. The subject of their research was the effectiveness of such functions as detecting a parked vehicle, describing the location of a parked vehicle, identifying the number plate, describing the event time, and ensuring conditions of anonymisation of persons and other vehicles. The results of this analysis confirmed the rationale behind the deployment of the e-control system under the implementation of the smart city concept in Warsaw.
This article is divided into sections. Section 2 describes how the e-control system functions, defines the goals and scenarios of the in-service measurements, and provides a discussion on the methodology for studying the statistical dependence of the system’s operating errors and the methods employed when assessing them. Section 3 provides sample results obtained under the studies conducted in Warsaw. Section 4 and Section 5 provide discussion and conclusions as well as summarising the elaboration.
2. Materials and Methods
2.1. E-Control System
What makes the system functional is a set of devices and the dedicated software. The mobile e-control system’s architecture is depicted in Figure 1 [12,17]. The central computational unit is enclosed in a housing mounted on the vehicle’s roof (Figure 2). The high-precision data acquisition sensors of a lidar, a video camera, an accelerometer, and a positioning unit are connected to the central unit’s input ports. The central unit is controlled by means of a tablet running on the Android operating system. The connectivity between the control panel and the central unit is based on a local high-speed computer network.
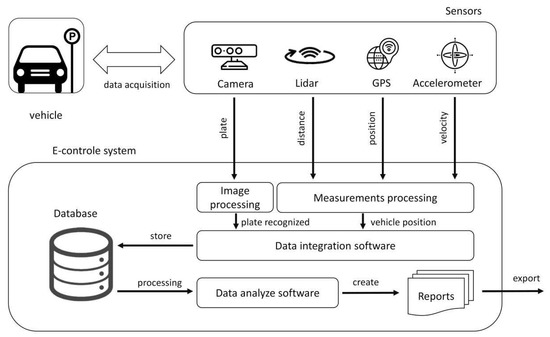
Figure 1.
E-control system architecture. Source: authors’ own materials.

Figure 2.
E-control system vehicle. Source: authors’ own materials.
Vehicle parking is formally understood as leaving a vehicle immobile in a dedicated parking space. In line with this definition, the e-control system’s task is to establish that a vehicle has been immobilised in the given parking space for a certain time. To this end, the system applies what is officially referred to as a technical definition of immobility, adapted to its measuring capabilities, yet accurate enough to prove that the vehicle is actually immobile; a vehicle is considered immobile if the coordinates of the geometric centre of its number plate are found at the same location twice, assuming a tolerance of 0.3 m in a horizontal plane. Moreover, the system recognises the vehicle to have been parked if the coordinates of the geometric centres of the number plates are found within the PUPZ, and the time interval between two verifications of their location is at least 5 min (a condition being significantly more stringent than the required minimum time specified in the vehicle parking definition provided in the act on road traffic, which results from the necessity of providing the drivers who use parking meters to settle the parking fee). This provides grounds for breaking the immobilised vehicles into two classes: parked (i.e., meeting all the conditions stated in the definition of parking by the Municipal Road Administration) and other. The system generates adequate documentation for all the detected cases of parked vehicles (referred to as matches in the Municipal Road Administration’s terminology) and other vehicles (non-parked). Figure 3 below provides an example of the photographic documentation produced for a sample case.
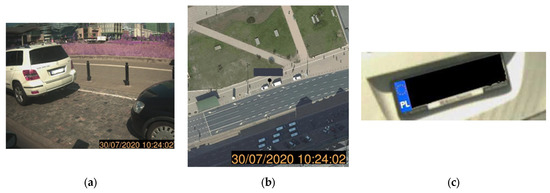
Figure 3.
Examples of e-control system documentation: (a) detected vehicle with a visible plate number, (b) vehicle location on the map, (c) plate with a visible registration number. Source: author’s own materials (plate numbers have been obfuscated for personal data protection purposes).
2.2. Research Problems, Goals and Methodology of Statistical Functionality Analysis
As aforementioned, the e-control system determines the location of a parked vehicle following two independent measurements of the coordinates of its location, taken at a certain time interval. If the difference between both geographic positions is not greater than 0.3 m in a horizontal plane, the system combines both readouts into a single matched measurement result. The matched measurement result implies immobility of a vehicle, which is a prerequisite for its case to be recognised as a parked vehicle. What has also been specified under the applicable technical requirements is that the percentage share of the matched measurements whose parked vehicle positioning error exceeds 0.3 m in a horizontal plane must not be higher than 5% of all matched measurements.
With regard to above technical requirements towards the system operation, one can pose the following questions concerning the statistical analysis of the location positioning error:
- Are the distributions of the positioning errors normal?
- What are the arithmetic mean values of these errors, and what ranges contain them?
- What is the proportion of the fractions of an error exceeding the permissible value of 0.3 m?
- Do the errors depend on the vehicle setup in the parking space (parallel/diagonal)?
In order to answer these questions, one can apply the following procedure of empirical study, essentially constituting correlation-based and experimental studies, as proposed by the authors, comprising tests of normality, estimation of confidence intervals, examination of the distribution of the proportions of error fractions, and non-parametric tests of consistency. The following is assumed in particular:
(1) For the testing of normality, the Shapiro–Wilk test is applied to examine the correlation between quantiles of experimental distribution and normal distribution.
(2) The confidence intervals established for the arithmetic mean values are determined with reference to the central limit theorem (CLT). According to this theorem, distributions of mean values approach the normal distribution along with the number of elements of a random sample representative of a certain population (even in cases where the general population is not characterised by normally distribution). In the case in question, the number of elements of the random sample is large enough to assume normality of the distribution of the mean values and to test the parametric hypothesis. For the purpose of testing the parametric hypotheses of the mean value, one generally assumes the null hypothesis of H0:μ = μ0 (that the arithmetic mean distribution parameter assumes a fixed value) and the opposite alternative hypothesis of H1:μ < μ0 (that there is no such value). In order to verify the null hypothesis formulated as above, Student’s t-test is applied. For the verification of the confidence interval hypothesis, one is required to follow the procedure of rejection or confirmation. Where this is the case, one should look for the lowest value of μ0 on which the null hypothesis is to be rejected in favour of the alternative hypothesis, yet in such a specific manner that would make the adoption of the alternative hypothesis as reliable as possible. In order to satisfy this condition, one must adopt the following two opposing assumptions:
- there is a relatively high probability of the null hypothesis being rejected when it is actually false (identified as the test power), e.g., power ≈ 1;
- there is a relatively low probability of the null hypothesis being rejected when it is actually true (identified as an error of the 1st kind, significance level), e.g., α ≈ 0.
(3) The distribution of the proportions of the permissible error fractions is examined under the assumption that the fraction proportions are characterised by a binomial (bimodal) distribution with the success/failure probability of p. The estimator for this probability is the confidence interval. Where the condition that the random sample size is large has been met, the confidence interval of the estimate of the p-value of probability may be established on the normal distribution basis [34]. The analysed statistical hypothesis on a single proportion should be subject to rejection/confirmation testing. The null hypothesis is based on the assumption that the fraction of erroneous measurements is 5% (this being the value specified in the technical requirements) vis-à-vis the alternative hypothesis that this fraction is actually smaller than 5%; one should strive for rejection of the null hypothesis and confirmation of the alternative one.
(4) In order to check if and how the distributions are dependent on the vehicle setup in the parking space, one must follow the procedure of experimental studies. The variables that describe the vehicle parking setup are a priori variables to which dependent variables are assigned (thus forming two groups of random variables corresponding to both vehicle setups). The analysis consists of verifying the hypothesis on consistency (by either confirming or rejecting it). In a general case (for non-parametric hypotheses), one should apply the Friedman test with Davenport correction and the Wilcoxon test [35].
3. Results
According to the general plan of the experiment, three independent measurement cycles were to be performed repeatedly in three different test areas. The test areas actually represented selected sections of streets forming a circular layout and featuring different kinds of parking spaces (parallel and diagonal parking setup). It was required that the test area should be driven around twice in a single measurement cycle in order to create adequate conditions for the detection of parked vehicles under the procedure of matching. The street layouts of the test areas were selected so as to enable examination of the relevant system functions in the following manner:
- Test Area 1, with parking spaces reserved for test vehicles as well as those generally available to the public, made it possible to test the correctness of assignment of location coordinates in daytime and of the anonymisation outcomes as well as the correctness of number plate recognition, which made it the most universal test area;
- Test Area 2, with reference clocks deployed, was intended primarily for studying the correctness of time recording in daytime but could also be used to test anonymisation and number plate recognition;
- Test Area 3 was used for nighttime measurements.
The follow-up step in the experiment plan was a series of statistical analyses.
3.1. Data Processing and Verification of the Normality of Distributions
The process of positioning of parked vehicles by the e-control system was verified for correctness by a comparative method using a test group of vehicles. The comparative method consisted of benchmarking the results of an in-service position measurement (obtained from the system) against the reference measurement (taken by an authorised land surveyor). Using the test group of vehicles is a guarantee that they do not leave their respective places while the mobile system is checking the occupancy of the parking spaces. The measure of quality of the position measurement by the e-control system is the deviation of this position against an unknown actual location. This measure can be defined as follows:
assuming that:
where:
- PUWG200—2000 National System of Land Coordinates [36],
- —reference value of the X coordinate established by a stationary method,
- —reference value of the Y coordinate established by a stationary method,
- —value of the X coordinate established by the e-control system,
- —value of the Y coordinate established by the e-control system,
- —horizontal positioning difference,
- —vertical positioning difference,
- —permissible limiting error of the land surveying measurement (with the value of 3 cm).
When the system functions under standard operating conditions, it is not always possible to match two runs that enable the specific features of a parked vehicle to be distinguished. This may be the case when, for instance, during one e-control vehicle run, the view of a vehicle subject to verification is obscured (this being referred to as occlusion). However, it is important to determine if the incapacity to match results from an erroneous position measurement. Some matching results have been provided in Table 1. The “Parallel” column corresponds to the vehicles parked in the parallel setup, while the “Diagonal” column includes those parked diagonally. The table shows that, of the 640 position measurements taken, the system successfully matched 612 measurements, which corresponded to 306 parking cases recognised in the course of the study (as a reminder, a single parking case is documented on the basis of results of two measurements). The “Number of vehicles matched” row identifies the parking cases recognised, while the “Other, measured twice” row corresponds to a correct two-time measurement with no parked vehicle detected (without identifying the cause yet). The values provided in rows 1 and 2 are totalled in the “Total, measured twice” row. “Once” is a row that contains the number of measurements not repeated, i.e., without the second observation that would confirm the vehicle parked status. The maximum number of observations resulting from the experiment plan (number of runs circling the test area multiplied by the size of the test group) is provided in the “Expected number of observations” row.

Table 1.
Matching efficiency.
Table 2 provides descriptive statistics of the positioning error for the matches, calculated on the basis of the values of the ΔXY deviations by applying Formula (1).
Table 2.
Matching efficiency.
Figure 4 depicts the error statistics for the parallel vehicle setup, namely (a) a bar chart illustrating the quantities established experimentally and the theoretical quantities with normal distribution, and (b) QQ—a graph of the quantiles of the random sample’s experimental distribution against the quantiles of the theoretical normal distribution (for the quantiles calculated according to the assumptions of the Shapiro–Wilk test for normality). Figure 5 provides the corresponding statistics for the diagonal vehicle parking setup. In both cases, one can clearly notice a discrepancy between the distribution of the quantities established experimentally and the theoretical (i.e., normal) distribution of quantities. The above discrepancy was confirmed by the Shapiro–Wilk test results, which implies that the hypothesis on the normality of distributions should be rejected.
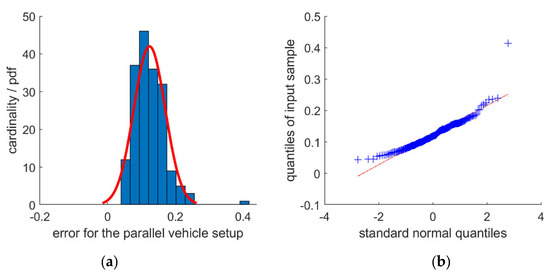
Figure 4.
Error statistics for the parallel vehicle setup: (a) bar chart illustrating the quantities established experimentally and the theoretical quantities with normal distribution; (b) QQ- graph of the quantiles of the random sample’s experimental distribution against the quantiles of the theoretical normal distribution (for the quantiles calculated according to the assumptions of the Shapiro–Wilk test for normality). Source: authors’ own materials.
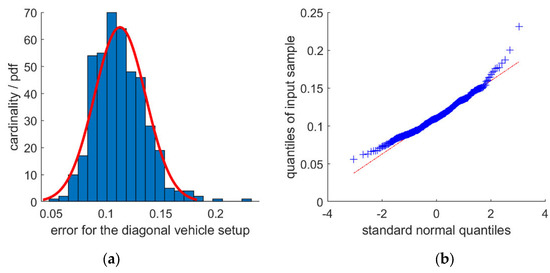
Figure 5.
Error statistics for the diagonal vehicle setup: (a) bar chart illustrating the quantities established experimentally and the theoretical quantities with normal distribution; (b) QQ—graph of the quantiles of the random sample’s experimental distribution against the quantiles of the theoretical normal distribution (for the quantiles calculated according to the assumptions of the Shapiro–Wilk test for normality). Source: authors’ own materials.
3.2. Determination of Confidence Intervals for Mean Values
In order to determine the upper bound of the confidence interval for mean values by application of the hypothesis rejection/confirmation method, it was assumed that the value of the test power should equal 0.99 and the significance level should be 0.01. Such an assumption corresponds to a probability of 0.99 that the null hypothesis is rejected in the event that it is actually false and to a probability of 0.01 that the null hypothesis is rejected in the event that it is, in fact, true. Figure 6 provides a graph of the power of Student’s t-test in the function of the assumed mean value of μ0 of the null hypothesis where parameter α = 0.01. Symbol “o” marks the plot points at which the test power reaches the required level. The boundary values thus established for this case equal: 0.14 m (for the parallel setup) and 0.118 m (for the diagonal setup). The legitimacy of the results was confirmed by the mean value test. Graphs representing the distribution of probability of the test hypothesis and of the mean value for the parallel setup random sample are provided in Figure 7. The p-value test probability that the result obtained as above is random equals 2.01 × 10−6. The corresponding graphs plotted for the distributions of the parallel setup hypotheses appear very much alike (p-value = 9.82 × 10−7).
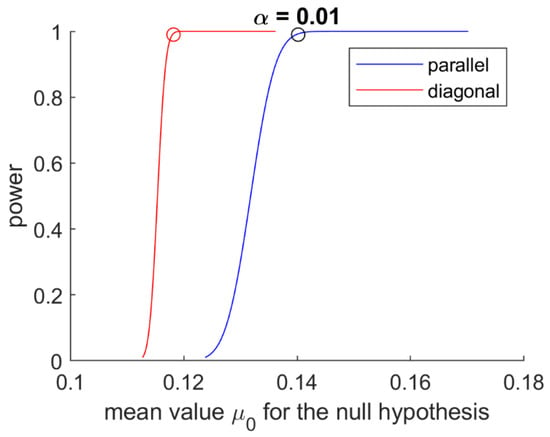
Figure 6.
Graph of the test power in the function of the assumed mean value of hypothesis H0.
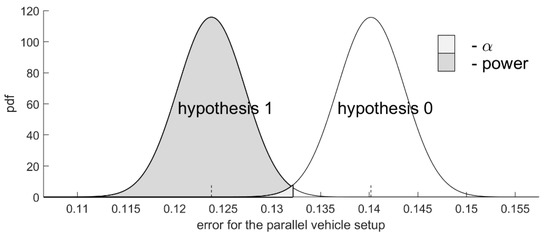
Figure 7.
Test hypothesis and opposite hypothesis for the parallel vehicle setup. Designations: α—cumulative probability of the null hypothesis rejection (when true), power—cumulative probability of the null hypothesis rejection (when false). Test probability p-value = 2.01 × 10−6.
The outcomes of the test of the proportions conducted on the significance level of 0.01 and with the test power close to 1 imply that the fraction of the maximum permissible error for the parallel vehicle parking setup is smaller than the permissible value of p 0 = 5%. The p-value probability that the result thus obtained is random equals 0.003. The maximum percentage share of the error fractions in the random sample is 0.01%. A similar test result was obtained for the diagonal vehicle parking setup, where the test parameters assumed the following values: test probability of p-value = 0.001, maximum share of the error fractions of 0.55%.
3.3. Test of Consistency
The consistency between the parallel setup distribution and the diagonal setup distribution was subject to a test. Table 3 below summarises the Friedman test with Davenport correction for consistency as conducted by the authors. The Friedman test is the non-parametric equivalent of the ANOVA test. The test consists of analysis of variance of repeated measurements for Friedman ranks. It is used when measurements of a given variable are made several times under different conditions. Its rows have been designated as follows: Effect—test effect, i.e., the explanatory variable that accounts for the differences in the mean values in the groups of variables (Total-Error), Error—error (total variability in the groups, non-explained variability), Total—variability of the combined groups of data. The table’s columns have the following designations: SS—mean square deviation of individual random variables (i.e., variability), df—number of degrees of freedom, MS—mean values of the error and effect statistic, Chi-sq—value of the chi-square statistic, Prob—test probability. It is the cumulative probability of drawing a sample that is as extreme as, or more extreme than, that observed, assuming the null hypothesis is correct. It is calculated from an estimate of the variance differences using the chi-squared statistic. The result thus obtained implies that the distributions of the errors for the parallel and diagonal vehicle parking setups are inconsistent. The foregoing is also confirmed by the Wilcoxon test result (the 0 hypothesis of consistency is to be rejected).
Table 3.
Results of the Friedman test for consistency.
4. Discussion
With reference to the results of the analyses discussed above, one can conclude that the general population of the error of positioning XY for a vehicle verified by the e-control system is statistically characterised as follows:
- the distributions of the random variables for the parallel and diagonal vehicle setups are not normal,
- the arithmetic mean values of the errors in the parallel and diagonal groups range within the confidence intervals limited by the maximum values of 0.14 and 0.118 m, respectively,
- the probability of an error with the maximum boundary value of 0.3 m or higher equals 0.01% for the parallel setup and 0.55% for the diagonal setup,
- the distributions of the random variables of the groups are inconsistent.
As aforementioned, what the authors studied in addition to the correctness of vehicle positioning was the efficiency of the plate number recognition, both in daytime and at night, anonymisation of vehicle number plates and of persons incidentally captured in the photographs documenting parking cases, and event time recording. These functions were examined by following the same procedure as described above. For this reason, the authors decided not to discuss all the computational steps performed to that end, providing only the relevant synthetic results instead.
In summary, the results of an analysis of the number plate recognition process for the category of matches show that all number plates (100%) were adequately recognised during the day. For nighttime, this coefficient came to 99.06%. Following an analysis of the anonymisation process, the authors concluded that it is 100% efficient in the case of the number plates of incidentally captured vehicles, while its efficiency is 98.8% for people. An examination of the measurement time accuracy against the reference time showed that the event recording error does not exceed the permissible boundary value of 100%.
5. Conclusions
The authors of this article described a method of experimental study used for statistical assessment of the operational performance indicators of technical systems as well as its application for the assessment of operational functionality of the parking enforcement e-control system implemented in the capital city of Warsaw. The subject of the research was the deviations of the in-service measurement results against the standard. The assumption originally adopted by the authors was that the deviations to be obtained were random variables. This method of empirical study is correlation-based and experimental in nature. What one typically seeks to establish in the field of correlation studies is the estimate of the parameters that determine the statistical dependence between the relevant variables, while in the field of experimental studies, the group-specific dependence between independent variables, i.e., a priori variables and dependent variables (in the pre-established groups of variables) is sought.
The article discusses the procedure proposed for the studies, comprising analysis of the normality of distributions, verification by rejection/confirmation of the hypothesis on the mean value of the population, verification by rejection/confirmation of the hypothesis on the proportions, as well as non-parametric tests of consistency. The results obtained by examining the assessment of the correctness of parked vehicle positioning by the e-control system were provided as a case study, addressed to discuss the practical application of the method in question. In this respect, the study elaborated in this paper concerns state-of-the-art technologies deployed in smart cities, where the parking enforcement problem proves to be a very significant element of public transportation policy making. The assessment results obtained by the authors imply that the system’s operational functionality is satisfactory, proving that the required performance levels have been successfully attained.
Author Contributions
Conceptualization and methodology, M.K. and A.C.; literature review, P.J.; conducting experimental measurements, M.K., A.C. and P.J.; data handling, A.C.; statistical analysis, M.K.; graphics and design, P.J.; writing—original draft preparation, M.K., A.C. and P.J.; writing—review and editing, K.A. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Faculty of Transport of the Warsaw University of Technology.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data presented in the article do not constitute the property of the authors. The study was commissioned by Municipal Road Administration in Warsaw. We obtained consent to onclude the data in the article, not to share it.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Shoup, D.C. Cruising for parking. Transp. Policy 2006, 13, 479–486. [Google Scholar] [CrossRef]
- Ogás, M.G.D.; Fabregat, R.; Aciar, S. Survey of smart parking systems. Appl. Sci. 2020, 10, 3872. [Google Scholar] [CrossRef]
- Jacyna, M.; Wasiak, M.; Lewczuk, K.; Karoń, G. Noise and environmental pollution from transport: Decisive problems in developing ecologically efficient transport systems. J. Vibroeng. 2017, 19, 5639–5655. [Google Scholar] [CrossRef]
- Zhu, Y.; Ye, X.; Chen, J.; Yan, X.; Wang, T. Impact of cruising for parking on travel time of traffic flow. Sustainability 2020, 12, 3079. [Google Scholar] [CrossRef]
- Mei, Z.; Feng, C.; Kong, L.; Zhang, L.; Chen, J. Assessment of different parking pricing strategies: A simulation-based analysis. Sustainability 2020, 12, 2056. [Google Scholar] [CrossRef]
- Macioszek, E.; Kurek, A. The Analysis of the Factors Determining the Choice of Park and Ride Facility Using a Multinomial Logit Model. Energies 2021, 14, 203. [Google Scholar] [CrossRef]
- Zadeh, N.R.N.; Cruz, J.C.D. Smart urban parking detection system. In Proceedings of the 2016 6th IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Penang, Malaysia, 25–27 November 2017; pp. 370–373. [Google Scholar] [CrossRef]
- Liu, J.; Mohandes, M.; Deriche, M. A multi-classifier image based vacant parking detection system. In Proceedings of the 2013 IEEE 20th International Conference on Electronics, Circuits, and Systems (ICECS), Abu Dhabi, United Arab Emirates, 8–11 December 2013; pp. 933–936. [Google Scholar] [CrossRef]
- Yeh, J.; Sooriyabandara, M.; Khan, A. ParkUs: A Novel Vehicle Parking Detection System. In Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017; pp. 4650–4656. [Google Scholar]
- The SEG-A System Is Efficient Parking Management and Law Enforcement Solution for Parking Providers. 2020. Available online: http://www.systemeg.com/sega/ (accessed on 16 March 2021).
- New Concept of On-Street Parking Regulation in Prague, Czech Republic. 2020. Available online: https://www.eltodo.cz/en/products-and-services/traffic-systems/parking-systems/ (accessed on 16 March 2021).
- Zarząd Dróg Miejskich w Warszawie. 2020. Available online: https://zdm.waw.pl/aktualnosci/e-kontrola-parkowania-rusza-od-stycznia/ (accessed on 16 March 2021).
- Mobile Parking Enforcement (SENFORCE). 2020. Available online: https://uat.sensennetworks.com/solutions/intelligent-transportation/mobile-parking-enforcement-senforce/ (accessed on 16 March 2021).
- Automated Parking Enforcement Program. 2020. Available online: https://www.edmonton.ca/transportation/driving_carpooling/automated-parking-enforcement.aspx (accessed on 16 March 2021).
- Mobile Enforcement Vehicles (MEVs) Multi-Purpose Vehicles Improve Productivity and Compliance. 2020. Available online: https://videalert.com/mobile-enforcement/ (accessed on 16 March 2021).
- AIMS. Parking Managament Software. 2020. Available online: https://aimsparking.com/features-benefits/lpr-enforcement (accessed on 16 March 2021).
- Smartfactor/E-kontrole w Strefie Płatnego Parkowania. Available online: https://smartfactor.pl/ (accessed on 16 March 2021).
- Xie, X.; Wang, C.; Chen, S.; Shi, G.; Zhao, Z. Real-time illegal parking detection system based on deep learning. In Proceedings of the 2017 International Conference on Compilers, Architectures and Synthesis for Embedded Systems Companion, New York, NY, USA, 13–18 October 2017; pp. 23–27. [Google Scholar] [CrossRef]
- Perković, T.; Šolić, P.; Zargariasl, H.; Čoko, D.; Rodrigues, J.J.P.C. Smart Parking Sensors: State of the Art and Performance Evaluation. J. Clean. Prod. 2020, 262, 121181. [Google Scholar] [CrossRef]
- Tamam, I.; Wang, S.; Djahel, S. An IoT-based Eco-Parking System for Smart Cities. In Proceedings of the 2020 IEEE International Smart Cities Conference (ISC2), Piscataway, NJ, USA, 28 September–1 October 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Bibri, S.E. The IoT for smart sustainable cities of the future: An analytical framework for sensor-based big data applications for environmental sustainability. Sustain. Cities Soc. 2018, 38, 230–253. [Google Scholar] [CrossRef]
- Singh, P.K.; Pawłowski, W.; Tanwar, S.; Kumar, N.; Rodrigues, J.J.P.C. Lecture Notes in Networks and Systems 121 Proceedings of First International Conference on Computing, Communications, and Cyber-Security (IC4S 2019), 1st ed.; Springer: Gateway East, Singapore, 2020. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, W.; Yeo, C.K. Automatic Detection of Parking Violation and Capture of License Plate. In Proceedings of the 2019 IEEE 10th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 17–19 October 2019; pp. 495–500. [Google Scholar] [CrossRef]
- Li, G.; Song, H.; Liao, Z.; Deng, K. An Effective Algorithm for Video-Based Parking and Drop Event Detection. Complexity 2019, 2019, 1–23. [Google Scholar] [CrossRef]
- Wahyono; Filonenko, A.; Jo, K.H. Illegally parked vehicle detection using adaptive dual background model. In Proceedings of the IECON 2015—41st Annual Conference of the IEEE Industrial Electronics Society, Chengdu, China, 9–12 November 2015; pp. 2225–2228. [Google Scholar] [CrossRef]
- Xue, F.; Lu, W.; Chen, Z.; Webster, C.J. From LiDAR point cloud towards digital twin city: Clustering city objects based on Gestalt principles. ISPRS J. Photogramm. Remote Sens. 2020, 167, 418–431. [Google Scholar] [CrossRef]
- Bock, F.; Eggert, D.; Sester, M. On-street Parking Statistics Using LiDAR Mobile Mapping. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Canary Islands, Spain, 15–18 September 2015; pp. 2812–2818. [Google Scholar] [CrossRef]
- Li, B.; Yang, L.; Xiao, J.; Valde, R.; Wrenn, M.; Leflar, J. Collaborative Mapping and Autonomous Parking for Multi-Story Parking Garage. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1629–1639. [Google Scholar] [CrossRef]
- Gong, Z.; Li, J.; Luo, Z.; Wen, C.; Wang, C.; Zelek, J. Mapping and Semantic Modeling of Underground Parking Lots Using a Backpack LiDAR System. IEEE Trans. Intell. Transp. Syst. 2019, 22, 1–13. [Google Scholar] [CrossRef]
- Veronese, L.D.; Badue, C.; Cheein, F.A.; Guivant, J.; de Souza, A.F. A single sensor system for mapping in GNSS-denied environments. Cogn. Syst. Res. 2019, 56, 246–261. [Google Scholar] [CrossRef]
- Kim, B.; Kim, D.; Park, S.; Jung, Y.; Yi, K. Automated Complex Urban Driving based on Enhanced Environment Representation with GPS/map, Radar, Lidar and Vision. IFAC-PapersOnLine 2016, 49, 190–195. [Google Scholar] [CrossRef]
- Choromański, W.; Grabarek, I.; Kozłowski, M. Research on an innovative multifunction steering wheel for individuals with reduced mobility. Transp. Res. Part F Traffic Psychol. Behav. 2019, 61, 178–187. [Google Scholar] [CrossRef]
- Kozłowski, M. Assessment of safety and ride quality based on comparative studies of a new type of universal steering wheel in 3D simulators. Eksploat. Niezawodn. 2016, 18, 481–487. [Google Scholar] [CrossRef]
- Brown, L.D.; Cai, T.T.; Gupta, A.D. Interval estimation for a binomial proportion. Stat. Sci. 2001, 16, 101–117. [Google Scholar] [CrossRef]
- Statsoft. Internetowy Podręcznik Statystyki. 2021. Available online: https://www.statsoft.pl/textbook/stathome.html (accessed on 16 March 2021).
- Council of Ministers. Regulation of the Council of Ministers of 15 October 2012 concerning the national reference system (pol. Rozporządzenie z dnia 15 października 2012 r. w sprawie państwowego systemu odniesień przestrzennych). Dz. Ustaw 2012, 1247, 1–6. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).