
Does the Inclusion of Spatio-Temporal Features Improve Bus Travel Time Predictions? A Deep Learning-Based Modelling Approach


Abstract
:1. Introduction
- Model Structure: In this study, we attempt to develop a bus travel time prediction model by considering spatiotemporal features by combining CNN and LSTM. The CNN layer captures the spatial features by extracting the relationship between adjacent bus stops in the bus stop sequence. Then, the temporal features of the bus travel time are captured through the LSTM layer.
- Input features: We take a wide variety of variables that can affect bus travel into account. In addition to bus stop-specific features, road speed features at the time when the bus is running, vehicle driver features, and weather features are used.
- We evaluate our proposed model through a dataset comprising two real-world bus lines. The experimental results show that the proposed model is superior to other baseline models.
2. Related Work
3. Methods
3.1. Problem Definition
Historical Trajectory
3.2. Model Architecture
3.2.1. Attribute Module
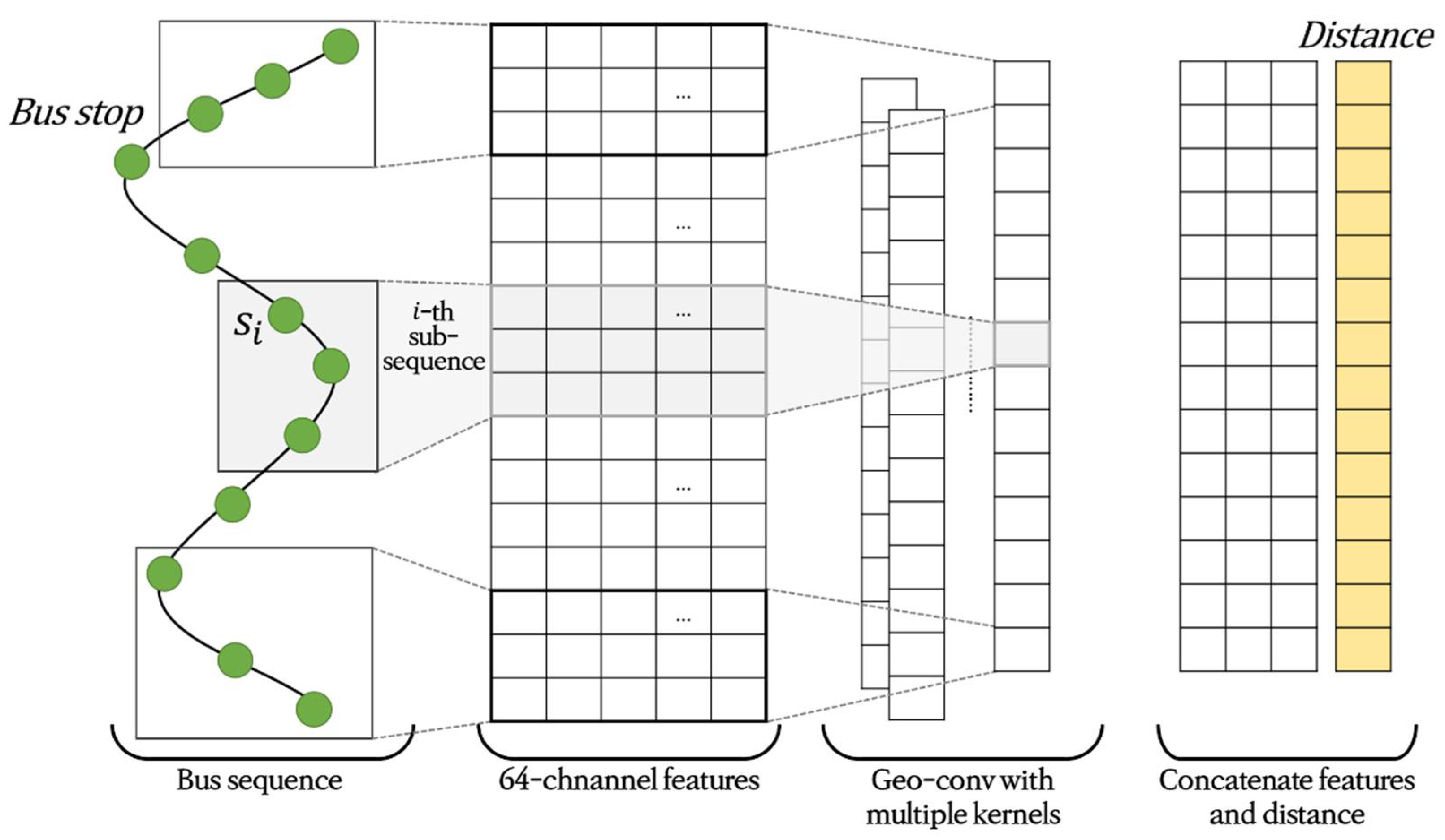
3.2.2. Spatio-Temporal Module
- Geo-convolution Layer.
- Recurrent Layer.
3.2.3. Prediction Module
4. Experiments
4.1. Experiment Setting
4.1.1. Dataset
4.1.2. Hyperparameters
- In the attribute module, we embed carID to , timeID to , and weekday to .
- In the geo-convolution layer, we fix the number of filters at 128, the channel size at 64, and the kernel size at 3. The ELU function is used as the activation function for .
- In the recurrent layer, we fix the hidden state size at 256 and the number of LSTM layers at 2.
- Finally, in the prediction layer, we fix the number of residual fully connected layers at 3 and the size at 256.
4.1.3. Metrics
4.1.4. Baseline Methods
- AVG: A simple average of the pairs of departure/arrival travel times shown in the training data set.
- Geo-convRNN: A simplified model of our model. We replace the LSTM layer used to incorporate the temporal dependence in the spatio-temporal layer with the vanilla RNN layer.
- Geo-convGRU: We replace the LSTM layer of the model with a Gated Recurrent Unit (GRU) layer. A GRU is a recurrent neural network proposed by Cho et al. [61] to solve the long-term dependency problems of RNN. It is similar to the LSTM layer in that it adopts the gate concept in the information transfer process. Therefore, although there are differences in the structural aspects of the GRU and LSTM layers, they perform similarly in that they use the same concept of storing information through the gate [62].
4.2. Experiment Results
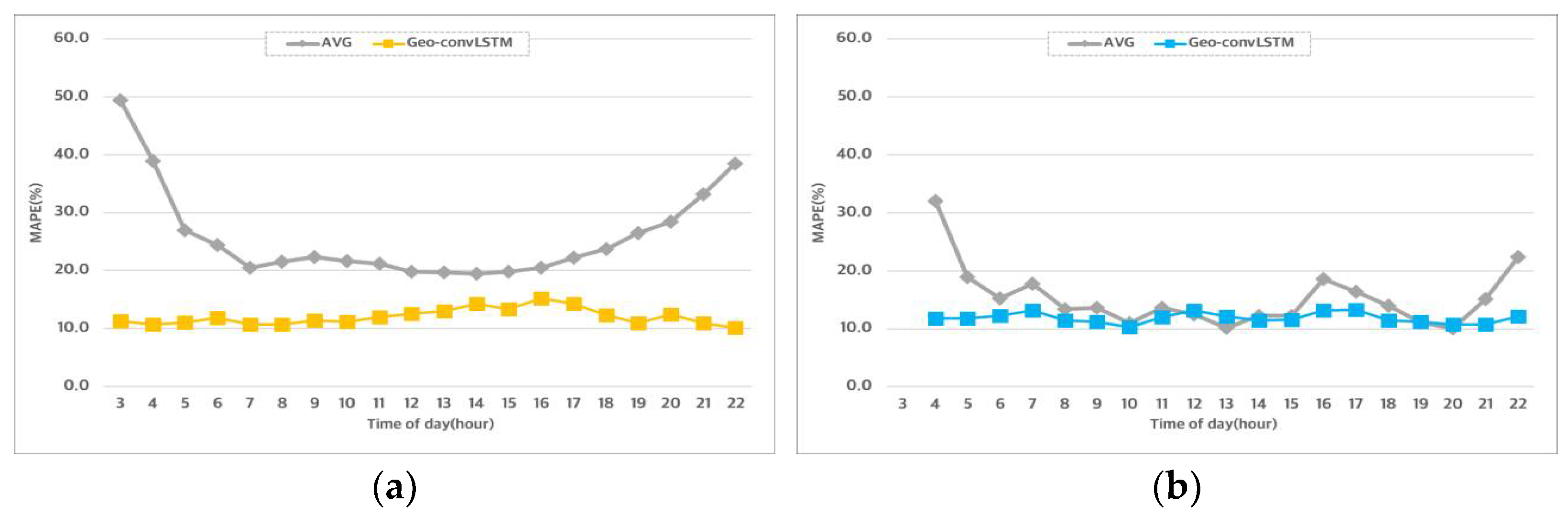
4.2.1. Performance Comparison
4.2.2. Effect of Variables
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trip ID | Travel Time | Driv-er ID | We-ek ID | Time ID | Latitude of Bus Stop | Longitude of Bus Stop | Distance between Bus Stops | Boarding (Target) | Alighting (Target) | Passenger | Boarding (Other) | Alighting (Other) | Link Speed | Link Lanes | Temperature | Precipitation |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 1186 | 48 | 2 | 561 | 37.599 | 127.022 | 0 | 3 | 6 | 26 | 41 | 28 | 12 | 3 | 17.1 | 0.0 |
| 1 | 1186 | 48 | 2 | 561 | 37.594 | 127.018 | 663 | 2 | 4 | 24 | 29 | 32 | 7 | 3 | 17.1 | 0.0 |
| 1 | 1186 | 48 | 2 | 561 | 37.590 | 127.009 | 1570 | 4 | 0 | 28 | 38 | 37 | 8 | 4 | 17.1 | 0.0 |
| 1 | 1186 | 48 | 2 | 561 | 37.586 | 127.002 | 2364 | 4 | 4 | 28 | 14 | 29 | 13 | 4 | 16.8 | 0.0 |
| 1 | 1186 | 48 | 2 | 561 | 37.583 | 126.998 | 2858 | 1 | 0 | 29 | 13 | 23 | 13 | 4 | 16.8 | 0.0 |
| 1 | 1186 | 48 | 2 | 561 | 37.579 | 126.997 | 3288 | 4 | 3 | 30 | 20 | 25 | 13 | 4 | 16.8 | 0.0 |
| 1 | 1186 | 48 | 2 | 561 | 37.575 | 126.997 | 3839 | 6 | 11 | 25 | 11 | 28 | 22 | 2 | 16.8 | 0.0 |
| 1 | 1186 | 48 | 2 | 561 | 37.571 | 126.995 | 4423 | 1 | 4 | 22 | 4 | 32 | 30 | 2 | 16.8 | 0.0 |
| 1 | 1186 | 48 | 2 | 561 | 37.570 | 126.990 | 4900 | 1 | 9 | 14 | 5 | 40 | 21 | 2 | 16.8 | 0.0 |
| 2 | 469 | 38 | 4 | 1132 | 37.585 | 127.002 | 0 | 3 | 0 | 18 | 13 | 6 | 19 | 3 | 13.5 | 1.5 |
| 2 | 469 | 38 | 4 | 1132 | 37.589 | 127.008 | 882 | 0 | 1 | 17 | 18 | 18 | 11 | 4 | 13.7 | 2.0 |
| 2 | 469 | 38 | 4 | 1132 | 37.593 | 127.018 | 1849 | 4 | 5 | 16 | 32 | 27 | 33 | 3 | 13.7 | 2.0 |
| 3 | 606 | 52 | 4 | 986 | 37.506 | 127.005 | 0 | 4 | 0 | 5 | 53 | 25 | 2 | 4 | 14.9 | 1.0 |
| 3 | 606 | 52 | 4 | 986 | 37.507 | 127.000 | 587 | 1 | 0 | 6 | 5 | 0 | 23 | 2 | 14.9 | 1.0 |
| 3 | 606 | 52 | 4 | 986 | 37.525 | 126.992 | 2777 | 0 | 1 | 5 | 5 | 10 | 35 | 3 | 17.6 | 0.5 |
| 3 | 606 | 52 | 4 | 986 | 37.530 | 126.991 | 3326 | 0 | 1 | 4 | 3 | 5 | 20 | 3 | 17.6 | 0.5 |
| 3 | 606 | 52 | 4 | 986 | 37.537 | 126.987 | 4223 | 0 | 1 | 3 | 0 | 7 | 20 | 3 | 17.6 | 0.5 |
| 4 | 498 | 36 | 4 | 280 | 37.568 | 126.983 | 0 | 1 | 10 | 8 | 12 | 51 | 35 | 2 | 15.6 | 0.0 |
| 4 | 498 | 36 | 4 | 280 | 37.570 | 126.985 | 438 | 0 | 1 | 7 | 5 | 15 | 27 | 2 | 15.6 | 0.0 |
| 4 | 498 | 36 | 4 | 280 | 37.570 | 126.989 | 821 | 0 | 1 | 6 | 15 | 6 | 26 | 2 | 15.6 | 0.0 |
| 4 | 498 | 36 | 4 | 280 | 37.571 | 126.999 | 1683 | 0 | 1 | 5 | 5 | 19 | 20 | 2 | 15.6 | 0.0 |
| 5 | 1101 | 13 | 3 | 436 | 37.528 | 127.031 | 0 | 25 | 2 | 40 | 57 | 21 | 20 | 3 | 18.4 | 0.0 |
| 5 | 1101 | 13 | 3 | 436 | 37.529 | 127.036 | 459 | 4 | 3 | 41 | 5 | 17 | 23 | 3 | 18.4 | 0.0 |
| 5 | 1101 | 13 | 3 | 436 | 37.528 | 127.039 | 757 | 12 | 3 | 50 | 40 | 17 | 21 | 3 | 18.4 | 0.0 |
| 5 | 1101 | 13 | 3 | 436 | 37.527 | 127.045 | 1298 | 0 | 22 | 28 | 0 | 37 | 24 | 3 | 18.4 | 0.0 |
| 5 | 1101 | 13 | 3 | 436 | 37.525 | 127.051 | 2000 | 5 | 14 | 19 | 9 | 44 | 29 | 5 | 18.4 | 0.0 |
| 5 | 1101 | 13 | 3 | 436 | 37.522 | 127.055 | 2537 | 2 | 3 | 18 | 2 | 11 | 22 | 7 | 18.4 | 0.0 |
| 5 | 1101 | 13 | 3 | 436 | 37.521 | 127.056 | 2694 | 17 | 0 | 35 | 24 | 1 | 22 | 7 | 18.4 | 0.0 |
| 5 | 1101 | 13 | 3 | 436 | 37.515 | 127.059 | 3412 | 6 | 9 | 32 | 31 | 116 | 23 | 6 | 18.4 | 0.0 |
| 5 | 1101 | 13 | 3 | 436 | 37.510 | 127.062 | 4017 | 0 | 15 | 17 | 0 | 32 | 37 | 6 | 18.4 | 0.0 |
References
- United Nations; Department of Economic and Social Affairs, Population Division. World Urbanization Prospects: The 2018 Revision (ST/ESA/SER. A/420); United Nations: New York, NY, USA, 2019. [Google Scholar]
- Kuramochi, T.; Elzen, M.; Peters, G. Global Emissions Trends and G20 Status and Outlook; United Nations: Nairobi, Kenya, 2020. [Google Scholar]
- Ceder, A.; Wilson, N.H. Bus network design. Transp. Res. Part B Methodol. 1986, 20, 331–344. [Google Scholar] [CrossRef]
- Lampkin, W.; Saalmans, P.D. The design of routes, service frequencies, and schedules for a municipal bus undertaking: A case study. J. Oper. Res. Soc. 1967, 18, 375–397. [Google Scholar] [CrossRef]
- Van Oudheusden, D.L.; Ranjithan, S.; Singh, K.N. The design of bus route systems—An interactive location-allocation approach. Transportation 1987, 14, 253–270. [Google Scholar] [CrossRef]
- Pattnaik, S.B.; Mohan, S.; Tom, V.M. Urban bus transit route network design using genetic algorithm. J. Transp. Eng. 1998, 124, 368–375. [Google Scholar] [CrossRef]
- Vakulenko, K.; Kuhtin, K.; Afanasieva, I.; Galkin, A. Designing optimal public bus route networks in a suburban area. Transp. Res. Procedia 2019, 39, 554–564. [Google Scholar] [CrossRef]
- Ahern, Z.; Paz, A.; Corry, P. Approximate multi-objective optimization for integrated bus route design and service frequency setting. Transp. Res. Part B Methodol. 2022, 155, 1–25. [Google Scholar] [CrossRef]
- Nadinta, D.S.; Surjandari, I.; Laoh, E. A Clustering-based Approach for Reorganizing Bus Route on Bus Rapid Transit System. In Proceedings of the 2019 16th International Conference on Service Systems and Service Management (ICSSSM), Shenzhen, China, 13–15 July 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Benn, H.P. No. Project SA-1; Bus Route Evaluation Standards. Transportation Research Board: Washington, DC, USA, 1995.
- Liu, W.; Teng, J.; Zhang, D. Performance evaluation at bus route level: Considering carbon emissions. In Proceedings of the ICTE 2013: Safety, Speediness, Intelligence, Low-Carbon, Innovation, Chengdu, China, 19–20 October 2013; ASCE: Reston, VA, USA, 2013. [Google Scholar]
- Simonelli, F.; Tinessa, F.; Marzano, V.; Papola, A.; Romano, A. Laboratory experiments to assess the reliability of traffic assignment map. In Proceedings of the 2019 6th International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Carcow, Poland, 5–7 June 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Jiménez, F.; Román, A. Urban bus fleet-to-route assignment for pollutant emissions minimization. Transp. Res. Part E Logist. Transp. Rev. 2016, 85, 120–131. [Google Scholar] [CrossRef]
- Mori, U.; Mendiburu, A.; Álvarez, M.; Lozano, J. A review of travel time estimation and forecasting for advanced traveller information systems. Transp. A Transp. Sci. 2015, 11, 119–157. [Google Scholar] [CrossRef]
- Schmitt, E.J.; Jula, H. On the limitations of linear models in predicting travel times. In Proceedings of the 2007 IEEE Intelligent Transportation Systems Conference, Bellevue, WA, USA, 30 September–3 October 2007. [Google Scholar]
- Chung, E.H.; Shalaby, A. Expected Time of Arrival Model for School Bus Transit Using Real-Time Global Positioning System-Based Automatic Vehicle Location Data. J. Intell. Transp. Syst. 2007, 11, 157–167. [Google Scholar] [CrossRef]
- Sun, D.; Luo, H.; Fu, L.; Liu, W.; Liao, X.; Zhao, M. Predicting Bus Arrival Time on the Basis of Global Positioning System Data. Transp. Res. Rec. 2007, 2034, 62–72. [Google Scholar] [CrossRef] [Green Version]
- Petersen, N.C.; Rodrigues, F.; Pereira, F.C. Multi-output bus travel time prediction with convolutional LSTM neural network. Expert Syst. Appl. 2019, 120, 426–435. [Google Scholar] [CrossRef] [Green Version]
- Skabardonis, A.; Geroliminis, N. Real-time Estimation of Travel Times on Signalized Arterials. Transp. Traffic Theory 2005, 387–406. Available online: https://os.zhdk.cloud.switch.ch/tind-tmp-epfl/c148e9a2-1df4-4e67-b494-f3acff299bd0?response-content-disposition=attachment%3B%20filename%2A%3DUTF-8%27%27Skab.Gerol.2005.pdf&response-content-type=application%2Fpdf&AWSAccessKeyId=ded3589a13b4450889b2f728d54861a6&Expires=1655274384&Signature=Uq00mE1PrpvqlANheA0grD7chH8%3D (accessed on 15 March 2022).
- Bai, M.; Lin, Y.; Ma, M.; Wang, P. Travel-Time Prediction Methods: A Review. In Smart Computation and Communication; Springer: Berlin/Heidelberg, Germany, 2018; pp. 67–77. [Google Scholar]
- Kwon, J.; Coifman, B.; Bickel, P. Day-to-Day Travel-Time Trends and Travel-Time Prediction from Loop-Detector Data. Transp. Res. Rec. 2000, 1717, 120–129. [Google Scholar] [CrossRef]
- Zhang, X.; Rice, J.A. Short-term travel time prediction. Transp. Res. Part C Emerg. Technol. 2003, 11, 187–210. [Google Scholar] [CrossRef]
- Nikovski, D.; Nishiuma, N.; Goto, Y.; Kumazawa, H. Univariate short-term prediction of road travel times. In Proceedings of the 2005 IEEE Intelligent Transportation Systems, Vienna, Austria, 16 September 2005. [Google Scholar]
- Abdelfattah, A.M.; Khan, A.M. Models for predicting bus delays. Transp. Res. Rec. 1998, 1623, 8–15. [Google Scholar] [CrossRef]
- Patnaik, J.; Chien, S.; Bladikas, A. Estimation of Bus Arrival Times Using APC Data. J. Public Transp. 2004, 7, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Jeong, R.; Rilett, L.R. Prediction Model of Bus Arrival Time for Real-Time Applications. Transp. Res. Rec. 2005, 1927, 195–204. [Google Scholar] [CrossRef]
- Agafonov, A.A.; Yumaganov, A.S. Bus Arrival Time Prediction Using Recurrent Neural Network with LSTM Architecture. Opt. Mem. Neural Netw. 2019, 28, 222–230. [Google Scholar] [CrossRef]
- Chien, S.I.; Ding, Y.; Wei, C. Dynamic Bus Arrival Time Prediction with Artificial Neural Networks. J. Transp. Eng. 2002, 128, 429–438. [Google Scholar] [CrossRef]
- Chen, M.; Liu, X.; Xia, J.; Chein, S.I. A Dynamic Bus Arrival Time Prediction Model Based on APC data. Comput. Aided Civ. Infrastruct. Eng. 2004, 19, 364–376. [Google Scholar] [CrossRef]
- Oda, T. An Algorithm for Prediction of Travel Time Using Vehicle Sensor Data. In Proceedings of the Third International Conference on Road Traffic Control, London, UK, 22–24 March 1994. [Google Scholar]
- Guin, A. Travel Time Prediction Using a Seasonal Autoregressive Integrated Moving Average Time Series Model. In Proceedings of the 2006 IEEE Intelligent Transportation Systems Conference, Toronto, ON, Canada, 17–20 September 2006. [Google Scholar]
- Xia, J.; Chen, M.; Huang, W. A Multistep Corridor Travel-Time Prediction Method Using Presence-Type Vehicle Detector Data. J. Intell. Transp. Syst. 2011, 15, 104–113. [Google Scholar] [CrossRef]
- Yildirimoglu, M.; Ozbay, K. Comparative evaluation of probe-based travel time prediction techniques under varying traffic conditions. In Proceedings of the Transportation Research Board 91st Annual Meeting, Washington, DC, USA, 22–26 January 2012; Transportation Research Board: Washington, DC, USA, 2012. [Google Scholar]
- Osman, O.; Rakha, H.; Mittal, A. Application of Long Short Term Memory Networks for Long- and Short-Term Bus Travel Time Prediction. Available online: https://www.preprints.org/manuscript/202104.0269/v1 (accessed on 15 March 2022).
- Wu, C.H.; Ho, J.M.; Lee, D.T. Travel-Time Prediction with Support Vector Regression. IEEE Trans. Intell. Transport. Syst. 2004, 5, 276–281. [Google Scholar] [CrossRef] [Green Version]
- Vanajakshi, L.; Rilett, L.R. Support Vector Machine Technique for the Short Term Prediction of Travel Time. In Proceedings of the 2007 IEEE Intelligent Vehicles Symposium, Istanbul, Turkey, 13–15 June 2007. [Google Scholar]
- Bin, Y.; Zhongzhen, Y.; Baozhen, Y. Bus Arrival Time Prediction Using Support Vector Machines. J. Intell. Transp. Syst. 2006, 10, 151–158. [Google Scholar] [CrossRef]
- Bai, C.; Peng, Z.R.; Lu, Q.C.; Sun, J. Dynamic Bus Travel Time Prediction Models on Road with Multiple Bus Routes. Comput. Intell. Neurosci. 2015, 2015, 432389. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, J.Y.; Wong, K.I.; Chen, Y.Y. Short-term Travel Time Estimation and Prediction for Long Freeway Corridor using NN and regression. In Proceedings of the 2012 15th International IEEE Conference on Intelligent Transportation Systems, Anchorage, AK, USA, 16–19 September 2012. [Google Scholar]
- Tak, S.; Kim, S.; Oh, S.; Yeo, H. Development of a Data-Driven Framework for Real-Time Travel Time Prediction. Comput. Aided Civ. Infrastruct. Eng. 2016, 31, 777–793. [Google Scholar] [CrossRef]
- Hou, Y.; Edara, P. Network Scale Travel Time Prediction using Deep Learning. Transp. Res. Rec. 2018, 2672, 115–123. [Google Scholar] [CrossRef]
- Zhang, H.; Wu, H.; Sun, W.; Zheng, B. DeepTravel: A Neural Network Based Travel Time Estimation Model with Auxiliary Supervision. arXiv 2018, arXiv:1802.02147. [Google Scholar]
- Li, L.; Jiang, X. Predicting the Travel Time in Using Recurrent Neural Networks: A Case Study of Fuzhou. In Proceedings of the Advances in Smart Vehicular Technology, Transportation, Communication and Applications, Kaohsiung, Taiwan, China, 6–8 November, 2017; Springer: Berlin/Heidelberg, Germany, 2017; Volume 86. [Google Scholar]
- Wei, W.; Jia, X.; Liu, Y.; Yu, X. Travel Time Forecasting with Combination of Spatial-Temporal and Time Shifting Correlation in CNN-LSTM Neural Network. In Proceedings of the Web and Big Data, Macau, China, 23–25 July 2018; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Wang, Z.; Fu, K.; Ye, J. Learning to Estimate the Travel Time. In Proceedings of the KDD ‘18: The 24th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, London, UK, 19–23 August 2018; ACM: New York, NY, USA, 2018. [Google Scholar]
- Wang, D.; Zhang, J.; Cao, W.; Li, J.; Zheng, Y. When Will You Arrive? Estimating Travel Time Based on Deep Neural Networks. In Proceedings of the Thirty-Second AAAI Conference on Artificial Intelligence, New Orleans, LA, USA, 2–7 February 2018. [Google Scholar]
- Xu, J.; Zhang, Y.; Chao, L.; Xing, C. STDR: A Deep Learning Method for Travel Time Estimation. In Proceedings of the Database Systems for Advanced Application, Chiang Mai, Thailand, 22–25 April 2019; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Li, X.; Wang, H.; Sun, P.; Zu, H. Spatiotemporal Features—Extracted Travel Time Prediction Leveraging Deep-Learning-Enabled Graph Convolutional Neural Network Model. Sustainability 2021, 13, 1253. [Google Scholar] [CrossRef]
- Ye, J.; Zhao, J.; Ye, K.; Xu, C. How to build a graph-based deep learning architecture in traffic domain: A survey. IEEE Trans. Intell. Transp. Syst. 2020, 23, 3904–3924. [Google Scholar] [CrossRef]
- Jiang, W.; Luo, J. Graph neural network for traffic forecasting: A survey. arXiv 2021, arXiv:2101.11174. [Google Scholar]
- Fang, X.; Huang, J.; Wang, F.; Zeng, L.; Liang, H.; Wang, H. ConSTGAT: Contextual spatial-temporal graph attention network for travel time estimation at baidu maps. In Proceedings of the 26th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, Virtual Event, CA, USA, 6–10 July 2020. [Google Scholar]
- Hong, H.; Lin, Y.; Yang, X.; Li, Z.; Fu, K.; Wang, Z.; Qie, X.; Ye, J. HetETA: Heterogeneous information network embedding for estimating time of arrival. In Proceedings of the 26th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, Virtual Event, CA, USA, 6–10 July 2020. [Google Scholar]
- Hu, J.; Guo, C.; Yang, B.; Jensen, C.S. Stochastic Weight Completion for Road Networks using Graph Convolutional Networks. In Proceedings of the 2019 IEEE 35th International Conference on Data Engineering (ICDE), Macao, China, 8–11 April 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Shao, K.; Wang, K.; Chen, L.; Zhou, Z. Estimation of Urban Travel Time with Sparse Traffic Surveillance Data. In Proceedings of the 2020 4th High Performance Computing and Cluster Technologies Conference & 2020 3rd International Conference on Big Data and Artificial Intelligence, Qingdao, China, 3–6 July 2020. [Google Scholar]
- Shen, Y.; Jin, C.; Hua, J. TTPNet: A Neural Network for Travel Time Prediction Based on Tensor Decomposition and Graph Embedding. IEEE Trans. Knowl. Data Eng. 2020. [Google Scholar] [CrossRef]
- Jin, G.; Yan, H.; Li, F.; Huang, J.; Li, Y. Spatio-Temporal Dual Graph Neural Networks for Travel Time Estimation. arXiv 2021, arXiv:2105.13591. [Google Scholar]
- Liu, H.; Xu, H.; Yan, Y.; Cai, Z.; Sun, T.; Li, W. Bus Arrival Time Prediction Based on LSTM and Spatial-Temporal Feature Vector. IEEE Access 2020, 8, 11917–11929. [Google Scholar] [CrossRef]
- Tang, K.; Chen, S.; Khattak, A.J.; Pan, Y. Deep Architecture for Citywide Travel Time Estimation Incorporating Contextual Information. J. Intell. Transp. Syst. 2021, 25, 313–329. [Google Scholar] [CrossRef]
- Chen, C.; Wang, H.; Yuan, F.; Jia, H.; Yao, B. Bus Travel Time Prediction Based on Deep Belief Network with Back-propagation. Neural Comput. Applic 2020, 32, 10435–10449. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Cho, K.; Van Merriënboer, B.; Bahdanau, D.; Bengio, Y. On the properties of neural machine translation: Encoder-decoder approaches. arXiv 2014, arXiv:1409.1259. [Google Scholar]
- Chung, J.; Gulcehre, C.; Cho, K.; Bengio, Y. Empirical evaluation of gated recurrent neural networks on sequence modeling. arXiv 2014, arXiv:1412.3555. [Google Scholar]



| Research | Target | Experimental Data | Deep Learning Model | External Factors |
|---|---|---|---|---|
| [41] | Link TT 1 | Probe-based travel time | CNN, LSTM | - |
| [42] | Link TT | Taxi trajectories | LSTM | - |
| [43] | Route TT | Taxi trajectories | LSTM | - |
| [27] | TT between bus stops | AVL | LSTM | - |
| [34] | TT between bus stops | AVL | LSTM | Weather, intersections |
| [44] | Link TT | Vehicle passage records | CNN + LSTM | - |
| [45] | Route TT | Taxi trajectories | MLP + LSTM | Weather, driver rider vehicle Profile, traffic restriction |
| [46] | Route TT | Taxi trajectories | CNN + LSTM | Weather, driver profile |
| [47,48] | Route TT | Taxi trajectories | CNN + LSTM | - |
| [51] | Route TT | Vehicle passage records | Graph attention + CNN | - |
| [52] | Route TT | Taxi trajectories | GCN + CNN | - |
| [53] | Link speed distribution | Loop detector (highway network) Taxi trajectories (city road network) | GNN | - |
| [54] | Link travel time distribution parameter | Intersection camera data | GAN (generator: GCN + LSTM, discriminator: MLP) | - |
| [55] | Route TT | Taxi trajectories | SDNE + CNN + LSTM | Driver profile |
| [56] | Route TT | Taxi trajectories | GCN + LSTM | - |
| [18] | TT between bus stops | AVL | CNN + LSTM | - |
| [57] | TT between bus stops | AVL | LSTM + ANN | - |
| [58] | Link TT | Taxi trajectories | Denoising auto-encoder | Road segment, contextual features |
| [59] | TT between bus stops | AVL | DBN | - |
| Notation | Description | ||
|---|---|---|---|
| Set of stops | |||
| Station | Stop | ||
| Geo-graphical features | The latitude of stop | ||
| The longitude of stop | |||
| Passenger features | The number of passengers getting on the target bus at the stop | ||
| The number of passengers getting off the target bus at the stop | |||
| The number of passengers on board when the target bus arrives at the stop | |||
| The number of passengers getting on buses other than the target bus at bus stop | |||
| The number of passengers getting off buses other than the target bus at bus stop | |||
| Link features | The speed of the link to which the stop belongs | ||
| The number of lanes of the link to which the stop belongs | |||
| Weather features | Temperature around the stop | ||
| Precipitation around the stop | |||
| Path | carID | Identity of the vehicle | |
| timeID | The time slot of the day (1 min: 1) | ||
| weekday | The day of week | ||
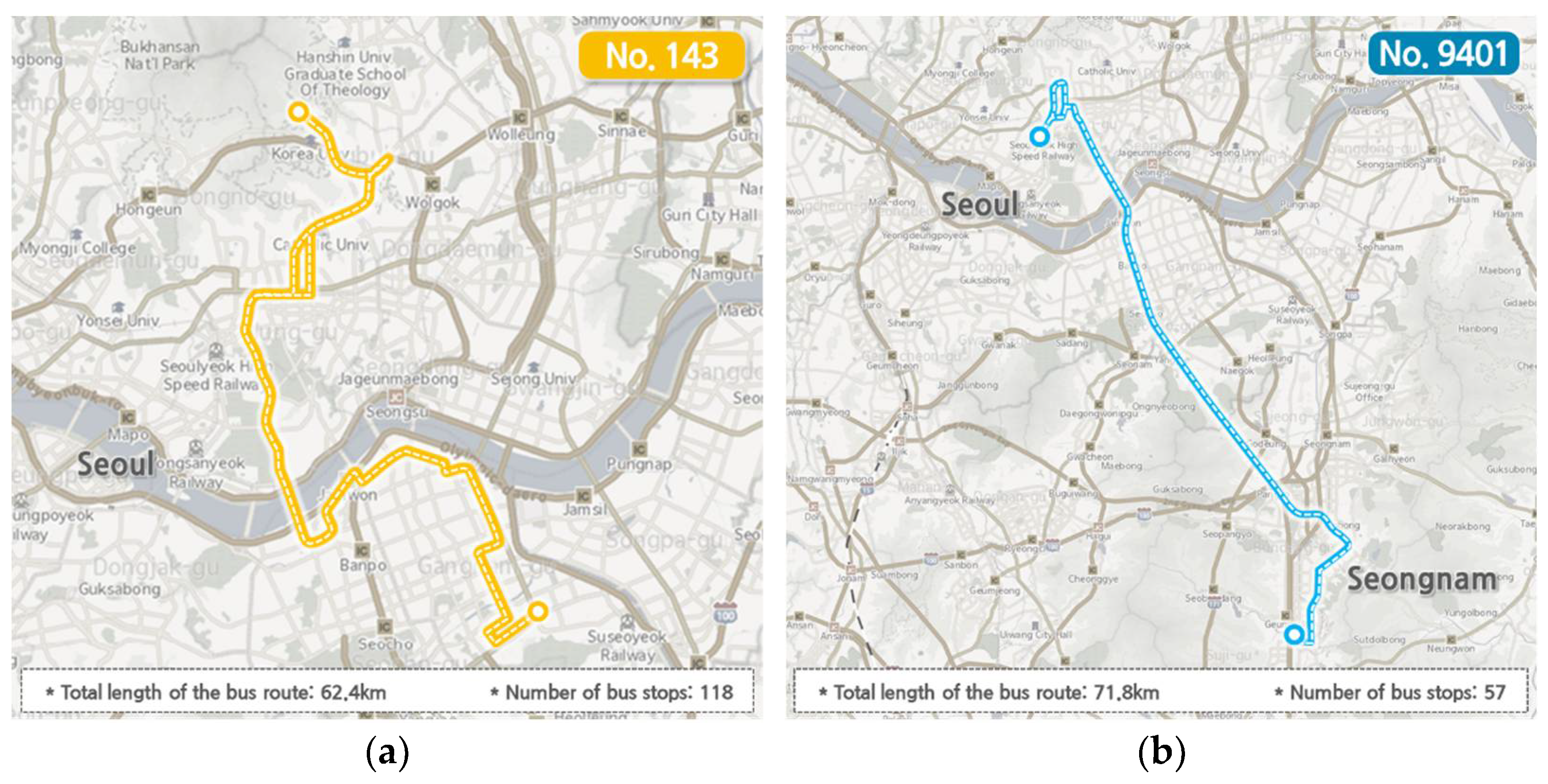
| Route | No. 143 (Local Bus) | No. 9401 (Inter-Regional Bus) | |||||
|---|---|---|---|---|---|---|---|
| N | Mean | S.D. | N | Mean | S.D. | ||
| Travel distance (km/trip) | 1,856,015 | 3.96 | 3.54 | 652,307 | 23.15 | 8.79 | |
| Travel time (min/trip) | 1,856,015 | 15.84 | 14.55 | 652,307 | 35.72 | 20.72 | |
| On board passenger | 1,856,015 | 14.77 | 9.33 | 652,307 | 18.64 | 13.47 | |
| Boarding passengers | Target bus | 1,856,015 | 2.37 | 2.97 | 652,307 | 2.26 | 3.22 |
| Other bus | 1,856,015 | 11.94 | 13.71 | 652,307 | 5.45 | 8.03 | |
| Alighting passengers | Target bus | 1,856,015 | 2.34 | 2.63 | 652,307 | 2.32 | 3.53 |
| Other bus | 1,856,015 | 11.48 | 12.59 | 652,307 | 5.84 | 10.07 | |
| Link speed (km/h) | 1,856,015 | 25.40 | 11.38 | 652,307 | 30.76 | 13.09 | |
| Link lanes | 1,856,015 | 3.06 | 1.24 | 652,307 | 3.37 | 1.12 | |
| Temperature (°C) | 1,856,015 | 22.97 | 4.73 | 652,307 | 22.34 | 4.73 | |
| Precipitation (mm) | 1,856,015 | 0.19 | 1.22 | 652,307 | 0.15 | 0.97 | |
| Route | No. 143 (Local Bus) | No. 9401 (Inter-Regional Bus) | ||||
|---|---|---|---|---|---|---|
| Metrics | RMSE (s) | MAE (s) | MAPE (%) | RMSE (s) | MAE (s) | MAPE (%) |
| AVG | 706.33 | 200.97 | 22.97 | 673.61 | 459.59 | 18.88 |
| Geo-convRNN | 575.15 | 151.42 | 16.78 | 490.74 | 341.41 | 17.12 |
| Geo-convGRU | 479.78 | 76.22 | 12.95 | 377.58 | 256.14 | 12.71 |
| Geo-convLSTM | 433.36 | 67.64 | 12.37 | 358.62 | 247.74 | 11.93 |
| Line | No. 143 (Local Bus) | No. 9401 (Inter-Regional Bus) | ||||
|---|---|---|---|---|---|---|
| Metrics | RMSE (s) | MAE (s) | MAPE (%) | RMSE (s) | MAE (s) | MAPE (%) |
| Geo-convLSTM | 433.36 | 97.64 | 12.37 | 358.62 | 247.74 | 11.93 |
| Eliminate passenger variables | 449.12 | 121.07 | 13.71 | 453.61 | 316.61 | 14.50 |
| Eliminate link variables | 449.97 | 127.70 | 14.87 | 552.56 | 363.68 | 15.42 |
| Eliminate weather variables | 435.76 | 102.53 | 12.65 | 396.20 | 367.14 | 12.45 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, G.; Choo, S.; Choi, S.; Lee, H. Does the Inclusion of Spatio-Temporal Features Improve Bus Travel Time Predictions? A Deep Learning-Based Modelling Approach. Sustainability 2022, 14, 7431. https://doi.org/10.3390/su14127431
Lee G, Choo S, Choi S, Lee H. Does the Inclusion of Spatio-Temporal Features Improve Bus Travel Time Predictions? A Deep Learning-Based Modelling Approach. Sustainability. 2022; 14(12):7431. https://doi.org/10.3390/su14127431
Chicago/Turabian StyleLee, Gyeongjae, Sangho Choo, Sungtaek Choi, and Hyangsook Lee. 2022. "Does the Inclusion of Spatio-Temporal Features Improve Bus Travel Time Predictions? A Deep Learning-Based Modelling Approach" Sustainability 14, no. 12: 7431. https://doi.org/10.3390/su14127431