
Prediction of Ground Water Content Using Hyperspectral Information through Laboratory Test


Abstract
:1. Introduction
2. Methodology
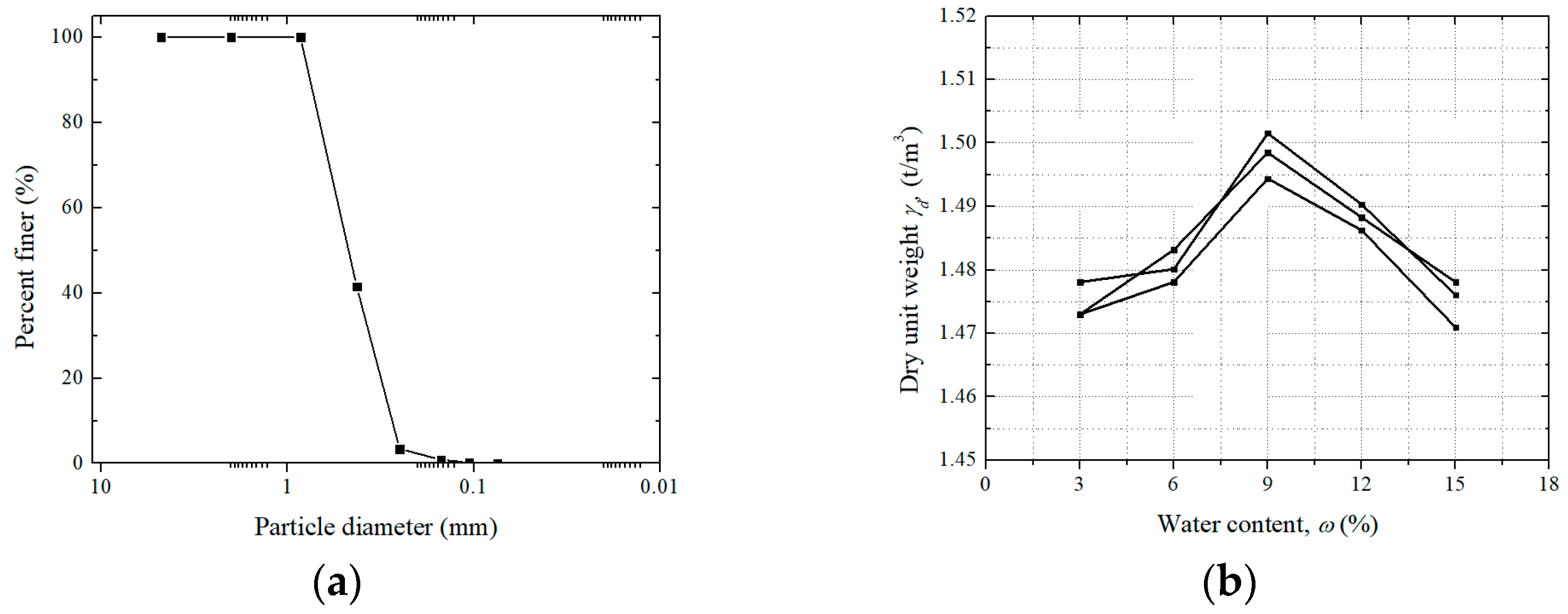
2.1. Material Properties of Soil
2.2. Laboratory Test to Obtain Hyperspectral Information
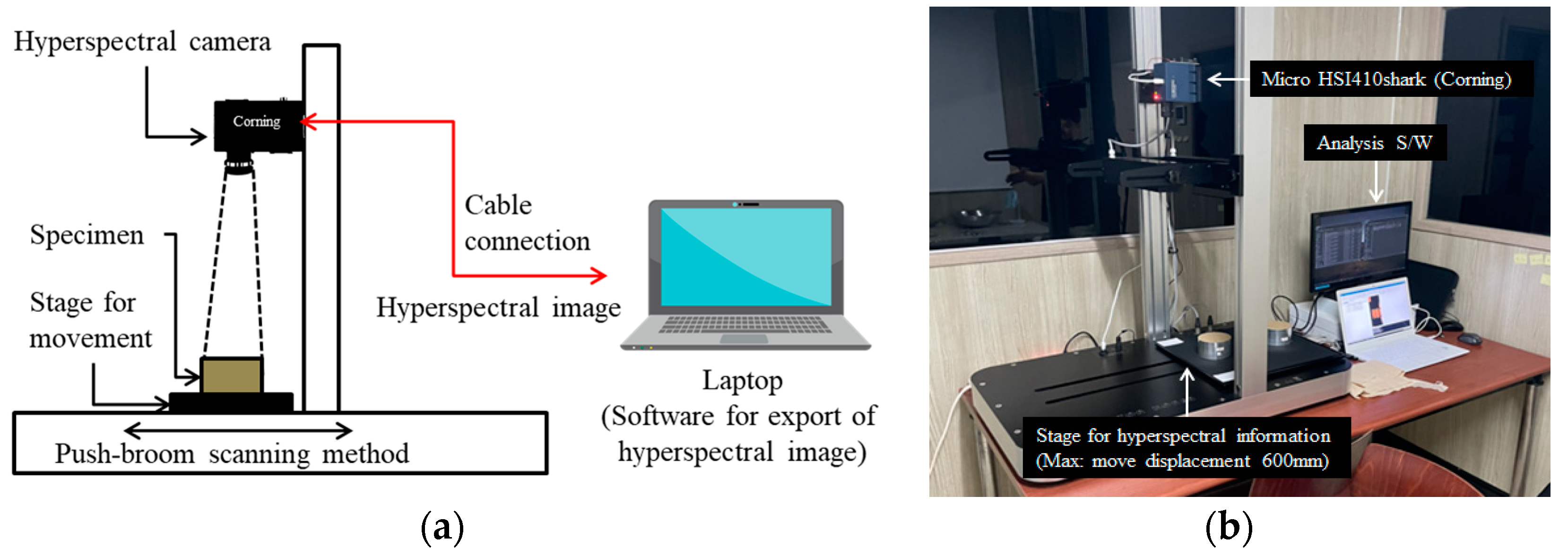
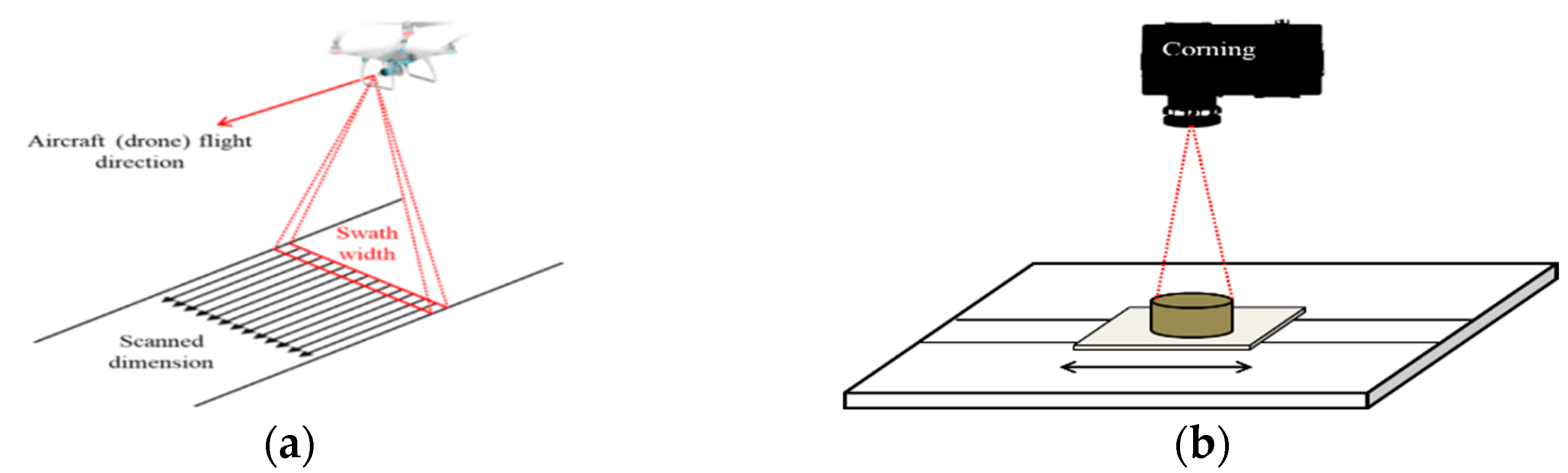
2.2.1. Analysis System to Obtain the Hyperspectral Information of the Soil
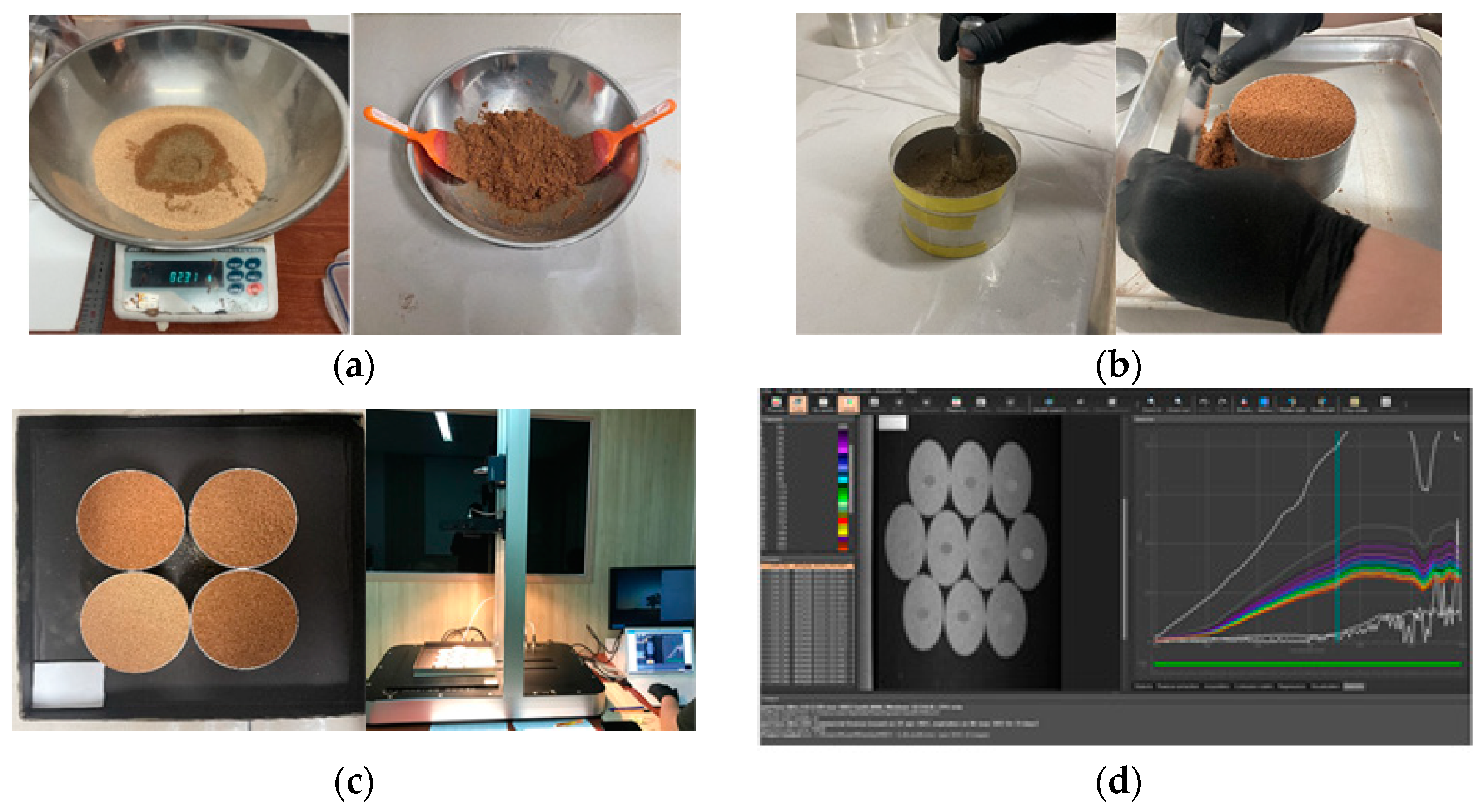
2.2.2. Procedure to Obtain Hyperspectral Information about Water Content
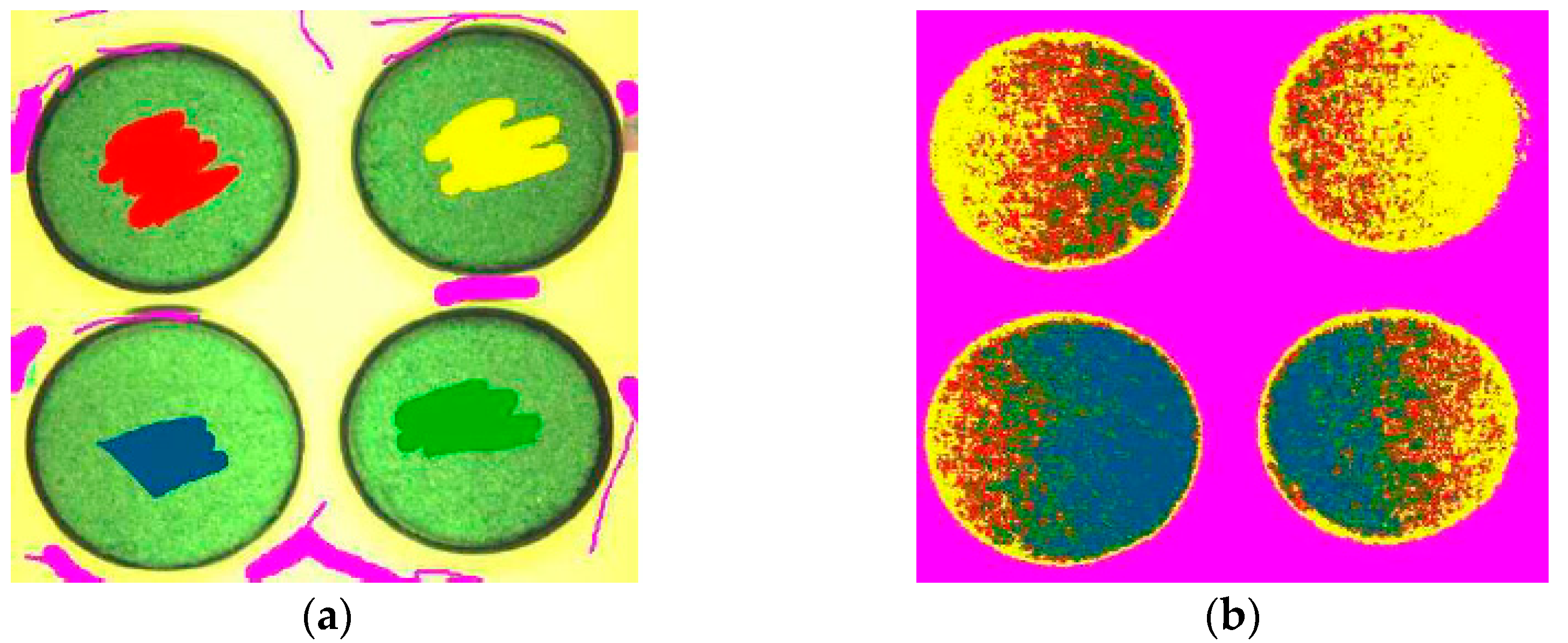
2.3. Extraction Method of Hyperspectral Information
3. Hyperspectral Information through Laboratory Tests
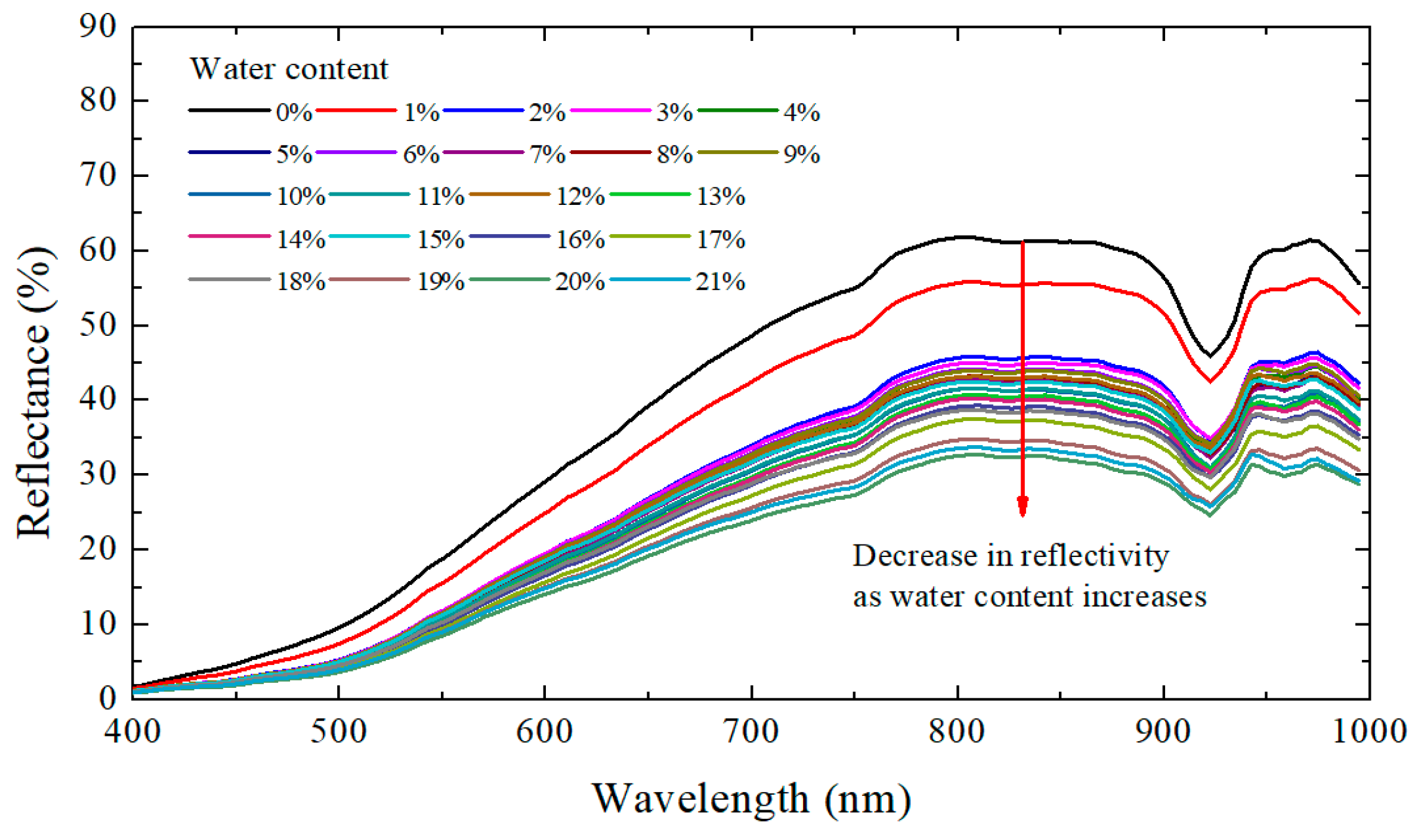
3.1. Relationshop between the Wavelength and the Reflection
3.2. Spectrum Index for Normalization from the Literature
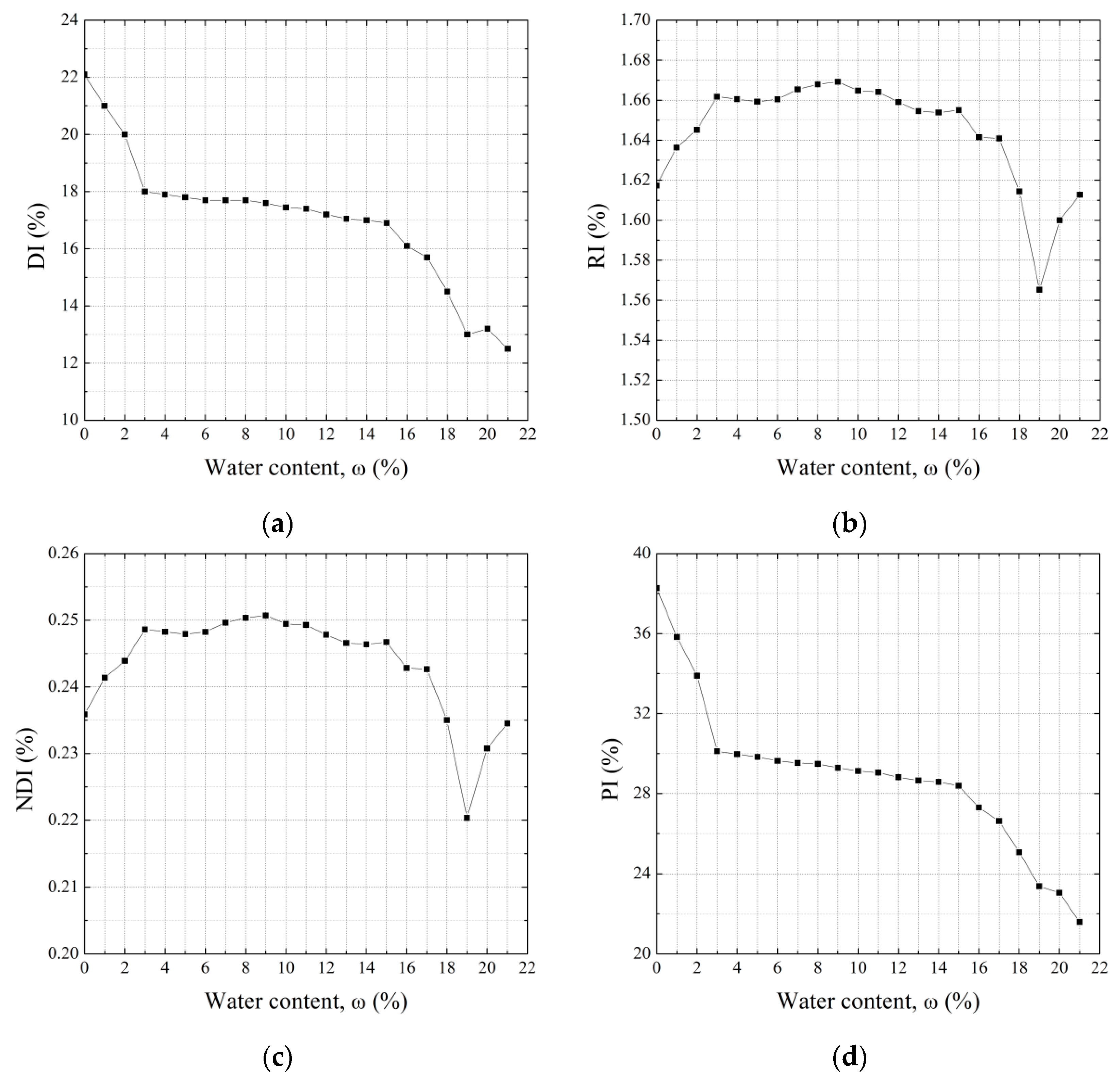
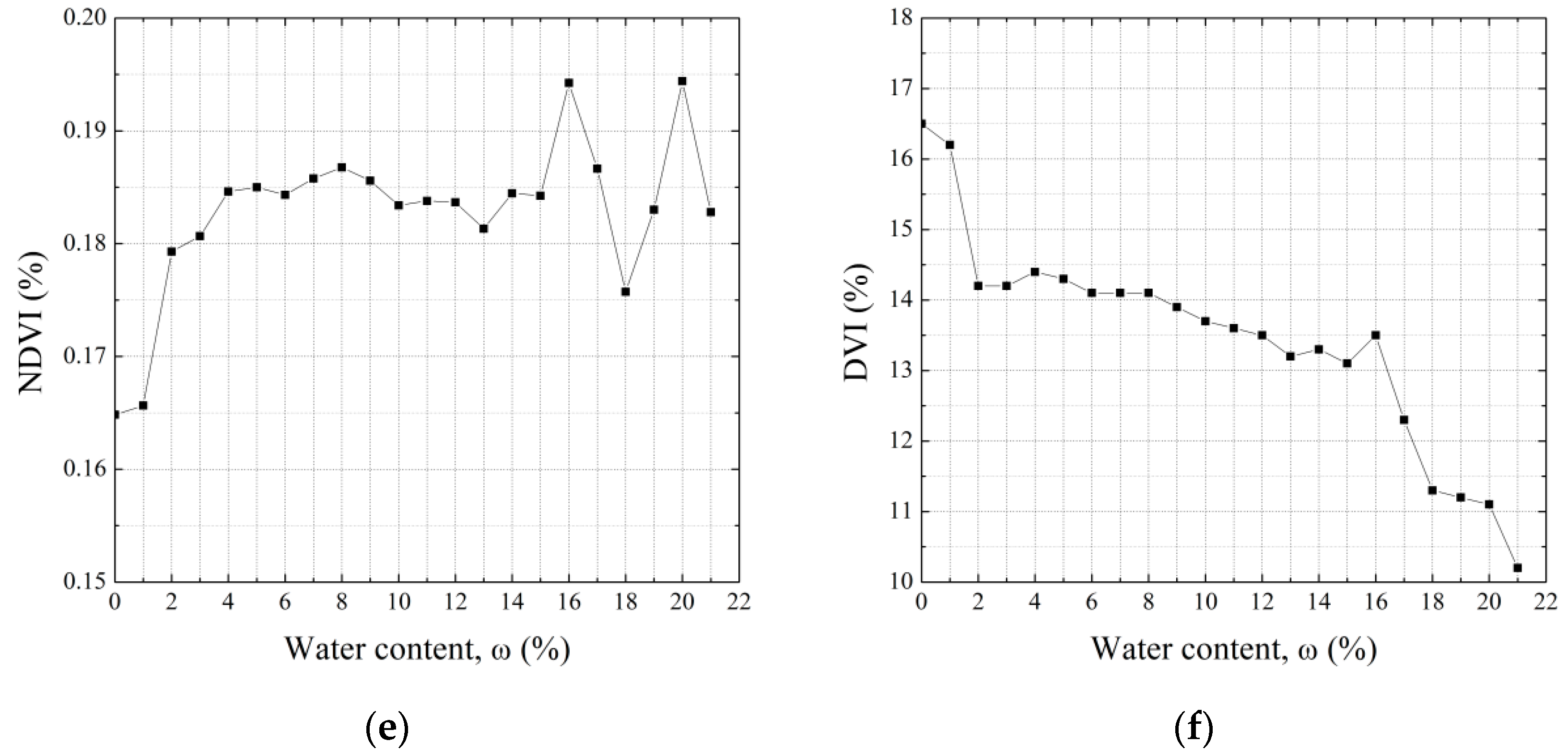
3.3. Calculation of the Spectrum Index
4. Development of a New Spectrum Index for Water Content Prediction
4.1. Export of Specific Reflection for the Development of a New Spectrum Index
4.2. Fitting of Data for a Suitable Equation of the Spectrum Index
4.3. Equation Selection for Water Content Prediction
5. Conclusions
- (1)
- In the existing literature, various spectrum indices for prediction of water content have been proposed. However, when the spectrum information obtained in this study was substituted into the equations for the spectrum index, it was confirmed that direct use is impossible, such as overlapping values and parabola curve. This is because the equation in the literature itself has great uncertainty and various conditions (indoor and outdoor, focal length, pixel width, etc.) exist in the process of acquiring hyperspectral information. Therefore, the reliability of the existing equation should be viewed as low. An optimized equation for prediction of water content should be selected by comparing it with the experimental results.
- (2)
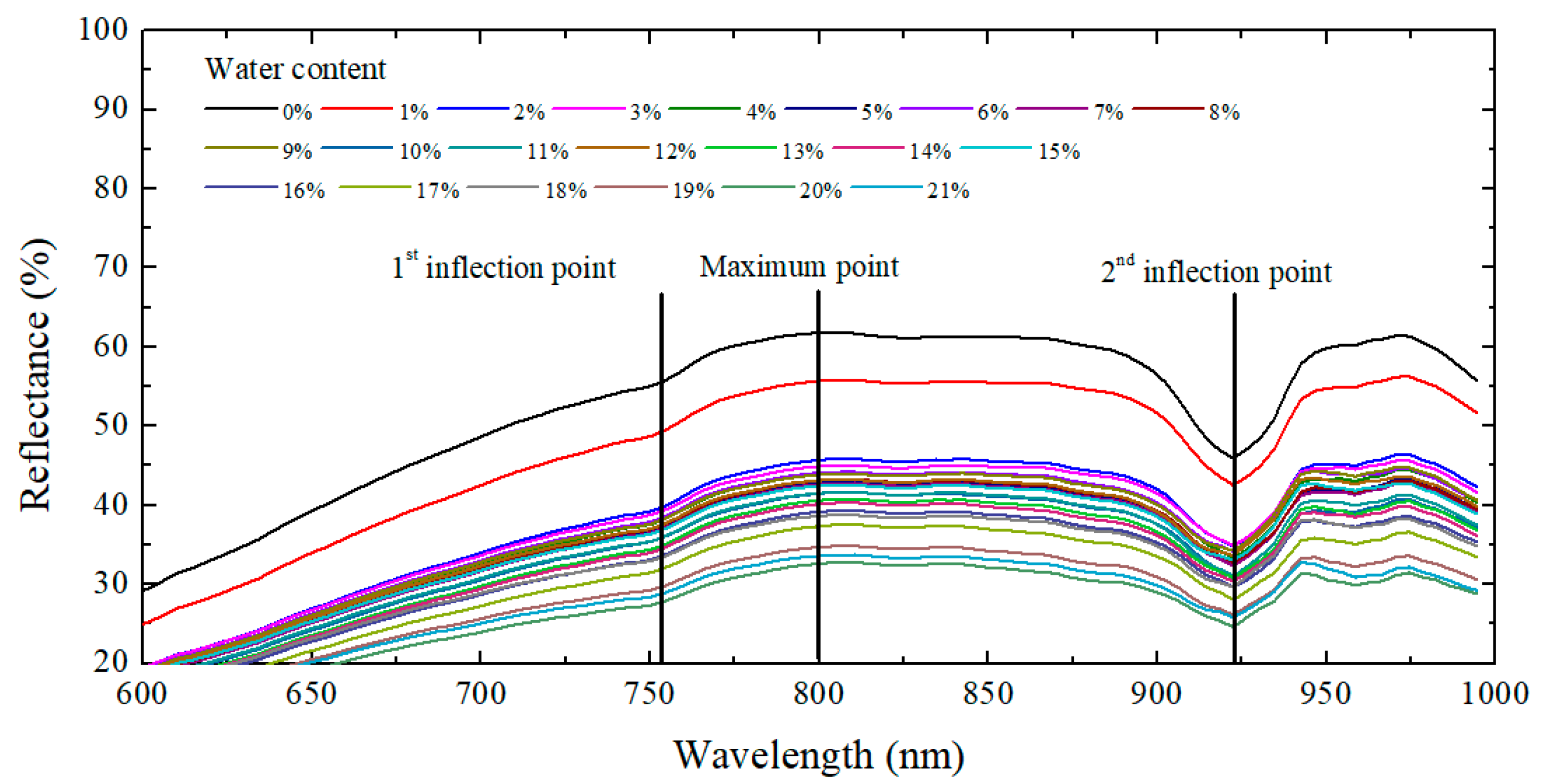
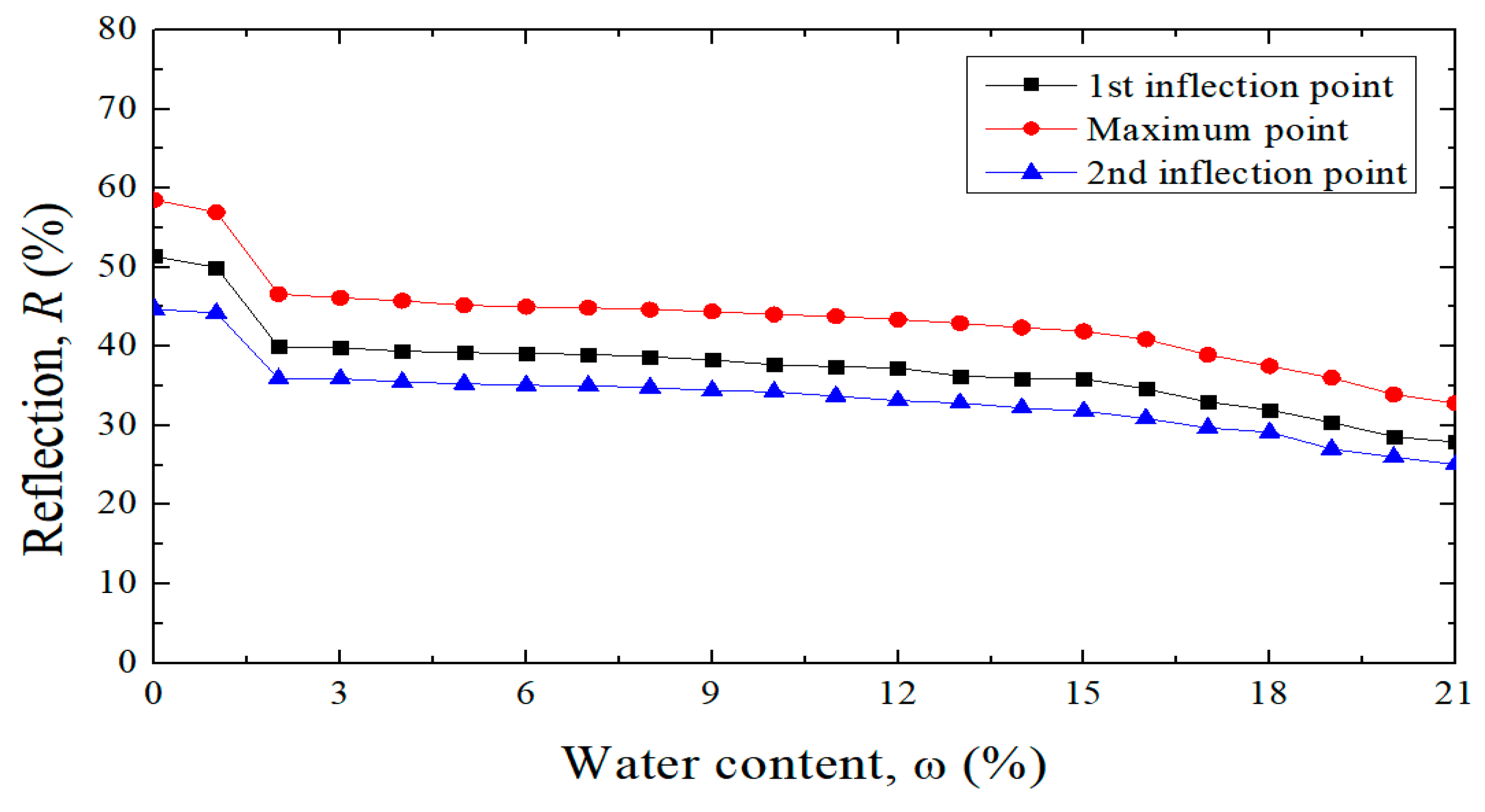
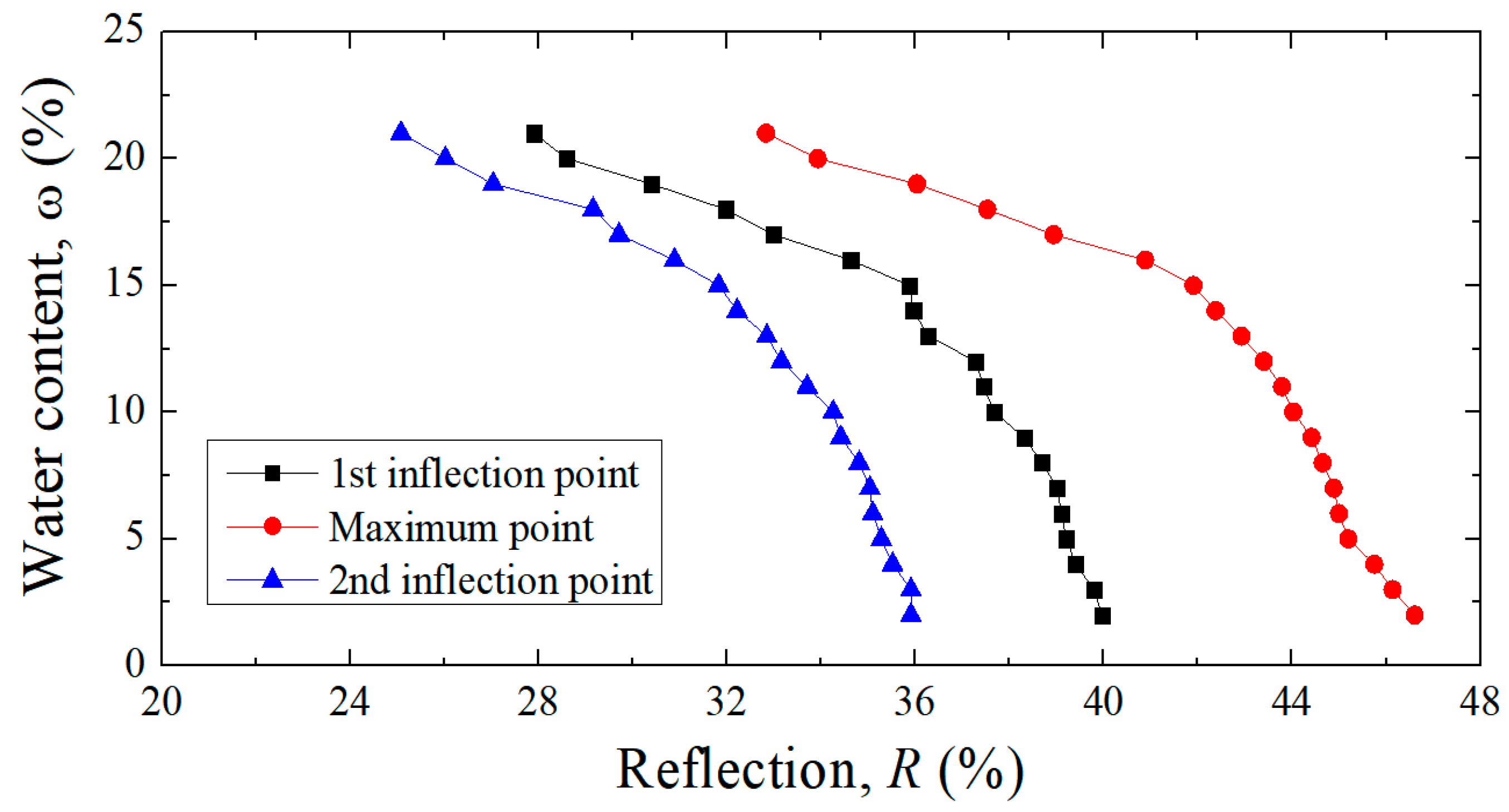
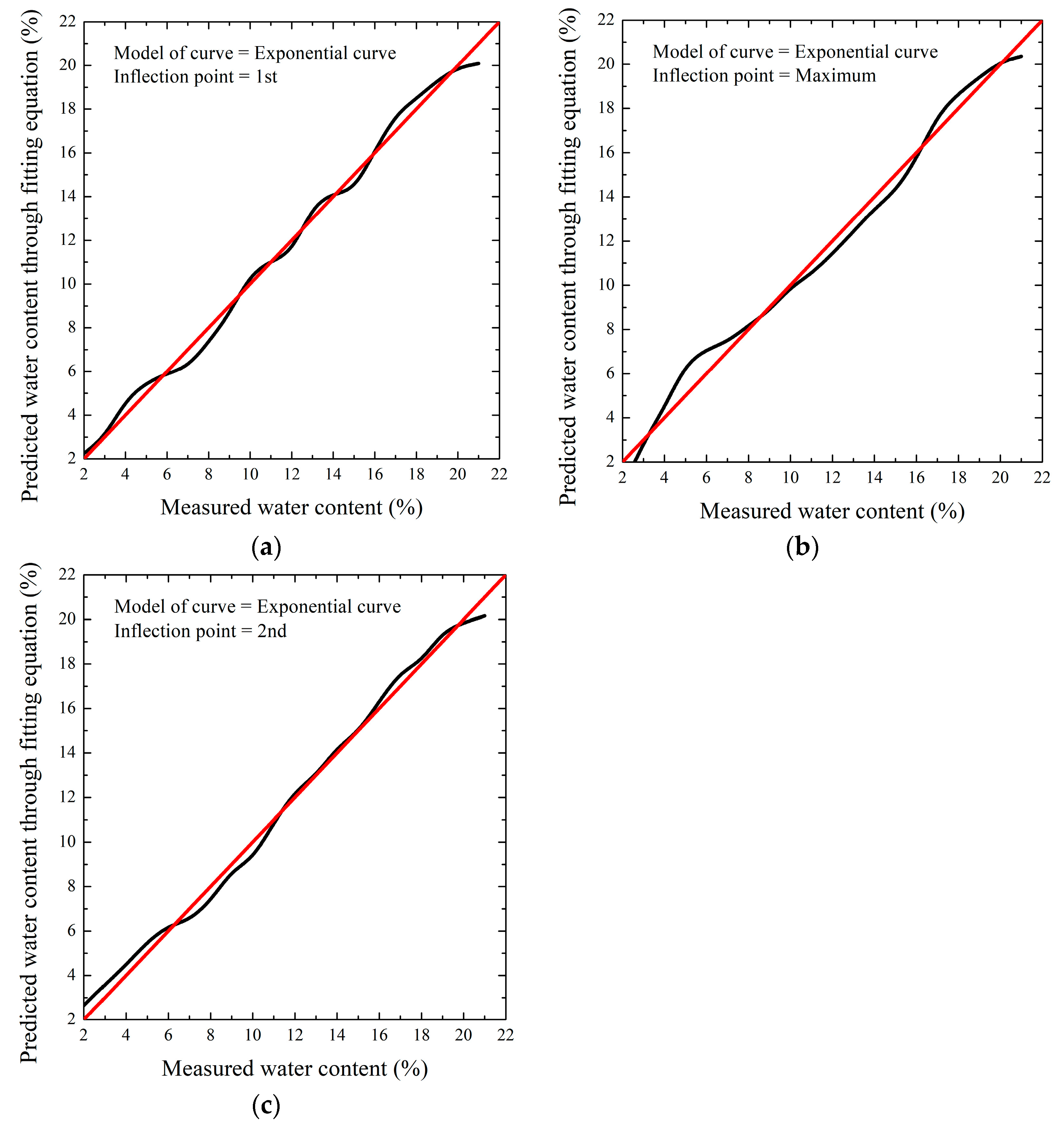
- The prediction equation of water content may change, depending on the wavelength. However, the relationship between the wavelength and the curve used in the existing theory could not be confirmed. It was judged that it would be appropriate to extract a significant point from the wavelength−reflectance curve. Therefore, significant points were derived at the first inflection point (wavelength at 750 nm), the point of the maximum reflectance measurement (800 nm), and the second inflection point (wavelength at 920 nm). The first inflection point was a visible region in the wavelength band and corresponded to a deep red color. The maximum and second inflection points were near-infrared rays (NIRs), which cannot be seen by the human eye. The wavelength used for the final prediction equation of water content was the first inflection point, and it was judged that the wavelength selection in the visible region would be appropriate.
- (3)
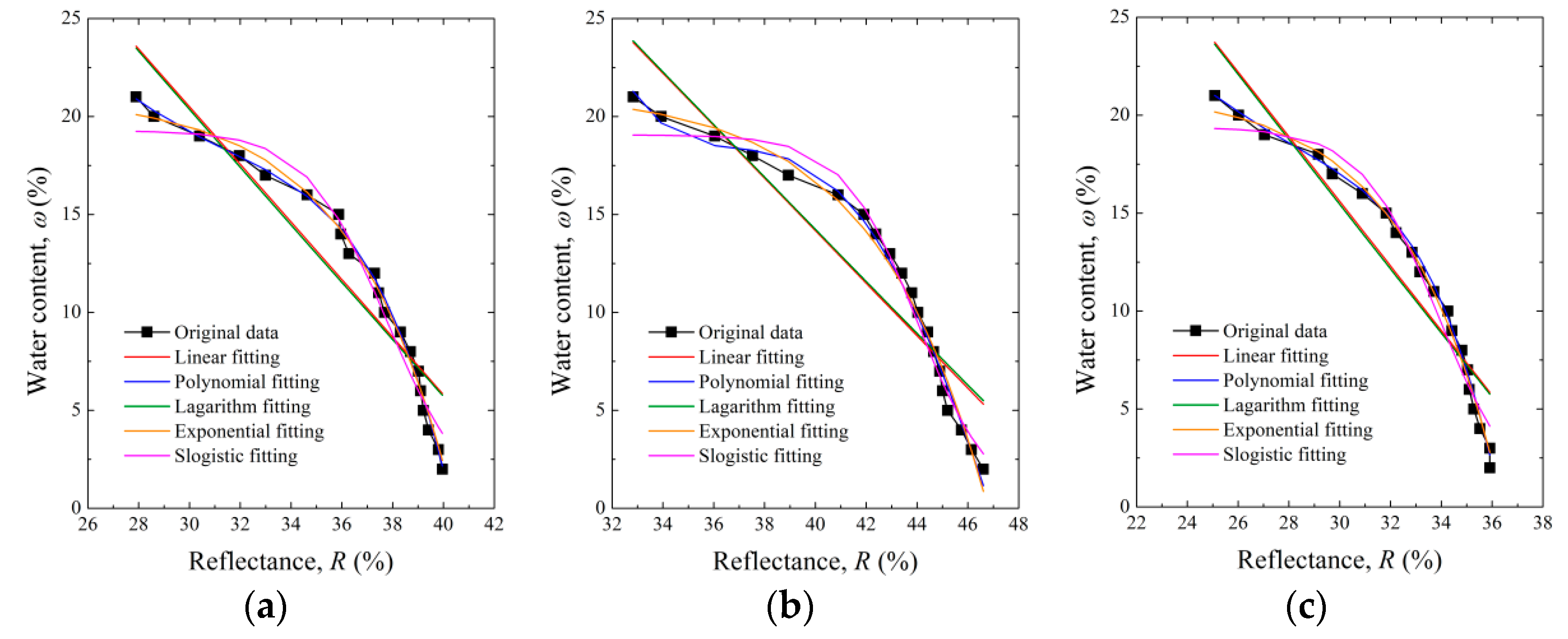
- Through the comparison of various function models, the exponential equation was selected as a suitable model, and each extraction point was compared. In addition to R-square indicating linear regression, the COV of the bias factor indicating the occurrence of error also needs to be considered. This is because the reflectance for each wavelength range has a dense range of distribution according to water content, so that the occurrence of error greatly affects the output value (water content).
- (4)
- The hyperspectral information was obtained through precise laboratory tests on standard sand in this study. The equation for converting hyperspectral information into water content was proposed. This has the disadvantage that it was derived without performing various samples and field tests. It is meaningful in that it basically normalizes the water content prediction and proposes a new prediction equation of water content using hyperspectral information.
- (5)
- The subgrade soil of a real road construction site is not simply sand but a composite of various particle sizes, and errors may occur when the water content prediction formula developed in this study is applied. Thus, the accuracy and reliability of the derived equation should be tested and confirmed. If an error occurs in the application to real ground, the developed equation for prediction should be modified with a more comprehensive selection of soil types. Therefore, in future research, we aim to derive a specific wavelength range and reflectance in which a difference occurs ac-cording to water content, rather than being affected by the type of soil. Consequently, the equation derived above will be further modified and supplemented.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kim, M.; Cho, Y. Evolution of corporate social contribution activities in the era of the Fourth industrial revolution. J. Korea Acad.-Ind. Coop. Soc. 2019, 20, 85–95. (In Korean) [Google Scholar]
- Hong, S.; Chung, T.; Park, J.; Shin, H.S. Research on development of construction spatial information technology, using rover’s camera system. J. Korea Acad.-Ind. Coop. Soc. 2019, 20, 630–637. (In Korean) [Google Scholar]
- Park, J.K.; Lee, K.W. Efficiency Analysis of Construction Automation Using 3D Geospatial Information. Sens. Mater. 2022, 34, 415–425. [Google Scholar] [CrossRef]
- Seo, J.W.; Gang, T.G.; Choe, C.H. [I Priority sector] Automation Technology and Control Technology of Construction Equipment. Constr. Eng. Manag. 2020, 21, 4–10. [Google Scholar]
- Sim, C.S.; Lee, S.Y.; Sim, S.H. [II Priority sector] Smart Construction Technology of road structures. Constr. Eng. Manag. 2020, 21, 11–15. [Google Scholar]
- Ma, Y.; Luan, Y.C.; Zhang, W.G.; Zhang, Y.Q. Numerical simulation of intelligent compaction for subgrade construction. J. Cent. South Univ. 2020, 27, 2173–2184. [Google Scholar] [CrossRef]
- ASTM D698; Standard Test Methods for Laboratory Compaction Characteristics of Soil Using Standard Effort (12,400 ft-lbf/ft3 (600 kN-m/m3)). American Society for Testing of Materials: West Conshohocken, PA, USA, 2017.
- Roodposhti, H.R.; Hafizi, M.K.; Kermani, M.R.S.; Nik, M.R.G. Electrical resistivity method for water content and compaction evaluation, a laboratory test on construction material. J. Appl. Geophys. 2019, 168, 49–58. [Google Scholar] [CrossRef]
- Ahmed, H.A. Electrical Resistivity Method for Water Content Characterization of Unsaturated Clay Soil. Ph.D. Thesis, Durham University, Durham, UK, 2014. [Google Scholar]
- Abdullah, N.H.H.; Kuan, N.W.; Ibrahim, A.; Ismail, B.N.; Majid, M.R.A.; Ramli, R.; Mansor, N.S. Determination of soil water content using time domain reflectometer (TDR) for clayey soil. In Proceedings of the AIP Conference Proceedings, Penang, Malaysia, 5 October 2018. [Google Scholar]
- Klotzsche, A.; Jonard, F.; Looms, M.C.; van der Kruk, J.; Huisman, J.A. Measuring soil water content with ground penetrating radar: A decade of progress. Vadose Zone J. 2018, 17, 1–9. [Google Scholar] [CrossRef]
- Wen, M.M.; Liu, G.; Horton, R.; Noborio, K. An in situ probe-spacing-correction thermo-TDR sensor to measure soil water content accurately. Eur. J. Soil Sci. 2018, 69, 1030–1034. [Google Scholar] [CrossRef]
- Peng, W.; Lu, Y.; Xie, X.; Ren, T.; Horton, R. An improved thermo-TDR technique for monitoring soil thermal properties, water content, bulk density, and porosity. Vadose Zone J. 2019, 18, 1–9. [Google Scholar] [CrossRef]
- Ercoli, M.; Di Matteo, L.; Pauselli, C.; Mancinelli, P.; Frapiccini, S.; Talegalli, L.; Cannata, A. Integrated GPR and laboratory water content measures of sandy soils: From laboratory to field scale. Constr. Build. Mater. 2018, 159, 734–744. [Google Scholar] [CrossRef]
- Zhou, L.; Yu, D.; Wang, Z.; Wang, X. Soil water content estimation using high-frequency ground penetrating radar. Water 2019, 11, 1036. [Google Scholar] [CrossRef]
- Van der Meer, F. Imaging Spectrometry-Basic Principles and Prospective Applications; Kluwer Academic Publishers: Dordrecht, The Netherlands, 2003. [Google Scholar]
- Bassani, C.; Cavalli, R.M.; Cavalcante, F.; Cuomo, V.; Palombo, A.; Pascucci, S.; Pignatti, S. Deterioration status of asbestos-cement roofing sheets assessed by analyzing hyperspectral data. Remote Sens. Environ. 2007, 109, 361–378. [Google Scholar] [CrossRef]
- Smith, M.L.; Ollinger, S.V.; Martin, M.E.; Aber, J.D.; Hallett, R.A.; Goodale, C.L. Direct estimation of aboveground forest productivity through hyperspectral remote sensing of canopy nitrogen. Ecol. Appl. 2002, 12, 1286–1302. [Google Scholar] [CrossRef]
- Kokaly, R.F.; Asner, G.P.; Ollinger, S.V.; Martin, M.E.; Wessman, C.A. Characterizing canopy biochemistry from imaging spectroscopy and its application to ecosystem studies. Remote Sens. Environ. 2009, 113, S78–S91. [Google Scholar] [CrossRef]
- Zhang, F.; Zhou, G.S. Research progress on monitoring vegetation water content by using hyperspectral remote sensing. Chin. J. Plant Ecol. 2018, 42, 517. [Google Scholar]
- Zhang, F.; Zhou, G. Estimation of vegetation water content using hyperspectral vegetation indices: A comparison of crop water indicators in response to water stress treatments for summer maize. BMC Ecol. 2019, 19, 18. [Google Scholar] [CrossRef]
- Kovar, M.; Brestic, M.; Sytar, O.; Barek, V.; Hauptvogel, P.; Zivcak, M. Evaluation of hyperspectral reflectance parameters to assess the leaf water content in soybean. Water 2019, 11, 443. [Google Scholar] [CrossRef]
- Aasen, H.; Burkart, A.; Bolten, A.; Bareth, G. Generating 3D hyperspectral information with lightweight UAV snapshot cameras for vegetation monitoring: From camera calibration to quality assurance. ISPRS J. Photogramm. Remote Sens. 2015, 108, 245–259. [Google Scholar] [CrossRef]
- Eismann, M.T.; Stocker, A.D.; Nasrabadi, N.M. Automated hyperspectral cueing for civilian search and rescue. Proc. IEEE 2009, 97, 1031–1055. [Google Scholar] [CrossRef]
- Haboudane, D.; Miller, J.R.; Pattey, E.; Zarco-Tejada, P.Z.; Strachan, I.B. Hyperspectral vegetation indices and novel algorithms for predicting green LAI of crop canopies: Modeling and validation in the context of precision agriculture. Remote Sens. Environ. 2004, 90, 337–352. [Google Scholar] [CrossRef]
- Tian, Y.; Yao, X.; Yang, J.; Cao, W.; Zhu, Y. Extracting red edge position parameters from ground and space-based hyperspectral data for estimation of canopy leaf nitrogen concentration in rice. Plant Prod. Sci. 2011, 14, 270–281. [Google Scholar] [CrossRef]
- Ge, X.; Wang, J.; Ding, J.; Cao, X.; Zhang, Z.; Liu, J.; Li, X. Combining UAV-based hyperspectral imagery and machine learning algorithms for soil moisture content monitoring. PeerJ 2019, 6926, e6926. [Google Scholar] [CrossRef]
- ASTM D422; Standard Test Method for Particle-Size Analysis of Soils. American Society for Testing of Materials: West Conshohocken, PA, USA, 2016.
- ISO 679; Cement-Test Methods-Determination of Strength. International Organization for Standardization: Geneva, Switzerland, 2009.
- ASTM D2487; Standard Practice for Classification of Soils for Engineering Purposes (Unified Soil Classification System). American Society for Testing of Materials: West Conshohocken, PA, USA, 2017.
- Lu, G.; Fei, B. Medical hyperspectral imaging: A review. J. Biomed. Opt. 2014, 19, 010901. [Google Scholar] [CrossRef] [PubMed]
- Ortega, S.; Guerra, R.; Diaz, M.; Fabelo, H.; López, S.; Callico, G.M.; Sarmiento, R. Hyperspectral Push-Broom Microscope Development and Characterization. IEEE Access 2019, 7, 122473–122491. [Google Scholar] [CrossRef]
- Habib, A.; Zhou, T.; Masjedi, A.; Zhang, Z.; Flatt, J.E.; Crawford, M. Boresight calibration of GNSS/INS-assisted push-broom hyperspectral scanners on UAV platforms. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 1734–1749. [Google Scholar] [CrossRef]
- Horstrand, P.; Díaz, M.; Guerra, R.; López, S.; López, J.F. A novel hyperspectral anomaly detection algorithm for real-time applications with push-broom sensors. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 4787–4797. [Google Scholar] [CrossRef]
- Angel, Y.; Turner, D.; Parkes, S.; Malbeteau, Y.; Lucieer, A.; McCabe, M.F. Automated georectification and mosaicking of UAV-based hyperspectral imagery from push-broom sensors. Remote Sens. 2020, 12, 34. [Google Scholar] [CrossRef]
- Jurado, J.M.; Pádua, L.; Hruška, J.; Feito, F.R.; Sousa, J.J. An Efficient Method for Generating UAV-Based Hyperspectral Mosaics Using Push-Broom Sensors. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 6515–6531. [Google Scholar]
- Yi, L.; Chen, J.M.; Zhang, G.; Xu, X.; Ming, X.; Guo, W. Seamless Mosaicking of UAV-Based Push-Broom Hyperspectral Images for Environment Monitoring. Remote Sens. 2021, 13, 4720. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| D10 1 (mm) | D30 2 (mm) | D60 3 (mm) | Coefficient of Uniformity, Cu | Coefficient of Curvature, Cc | Percent Passing No. 200 Sieve (%) | Soil Classification Based on USCS [30] |
|---|---|---|---|---|---|---|
| 0.270 | 0.358 | 0.527 | 1.952 | 0.901 | 0.06 | SP |
| Research | Spectrum Index | |
|---|---|---|
| Ge et al. [27] | DI = R866 − R655 | (1) |
| Ge et al. [27] | RI = R866/R655 | (2) |
| Ge et al. [27] | NDI = (R866 − R655)/(R866 + R655) | (3) |
| Ge et al. [27] | PI = (R866 − 0.4404R655 − 0.3308)/(1 + 0.44012)1/2 | (4) |
| Haboudane et al. [25] | NDVI = (R800 − R680)/(R800 + R680) | (5) |
| Tian et al. [26] | DVI = R800 − R680 | (6) |
| Point | Fitting Model | Equation | R2 |
|---|---|---|---|
| 1st inflection | Linear | 0.837 | |
| Polynomial | 0.994 | ||
| Logarithm | 0.858 | ||
| Exponential | 0.991 | ||
| Slogistic | 0.968 | ||
| Maximum inflection | Linear | 0.846 | |
| Polynomial | 0.989 | ||
| Logarithm | 0.833 | ||
| Exponential | 0.986 | ||
| Slogistic | 0.977 | ||
| 2nd inflection | Linear | 0.880 | |
| Polynomial | 0.995 | ||
| Logarithm | 0.871 | ||
| Exponential | 0.993 | ||
| Slogistic | 0.970 |
| Model of Curve | Inflection Point | Bias Factor | |||
|---|---|---|---|---|---|
| R-Square | Average | St. Dev. | COV (%) | ||
| Exponential | 1st | 0.9924 | 1.010 | 0.066 | 6.554 |
| Maximum | 0.9872 | 0.992 | 0.158 | 15.956 | |
| 2nd | 0.9939 | 1.029 | 0.094 | 9.100 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, K.; Park, J.J.; Hong, G. Prediction of Ground Water Content Using Hyperspectral Information through Laboratory Test. Sustainability 2022, 14, 10999. https://doi.org/10.3390/su141710999
Lee K, Park JJ, Hong G. Prediction of Ground Water Content Using Hyperspectral Information through Laboratory Test. Sustainability. 2022; 14(17):10999. https://doi.org/10.3390/su141710999
Chicago/Turabian StyleLee, Kicheol, Jeong Jun Park, and Gigwon Hong. 2022. "Prediction of Ground Water Content Using Hyperspectral Information through Laboratory Test" Sustainability 14, no. 17: 10999. https://doi.org/10.3390/su141710999