Abstract
With the technical support of an intelligent networking environment, autonomous driving technology is facing a new stage of development, and the decision-making behavior of autonomous vehicles is changing fundamentally, so it is urgent to explore the lane-changing decision-making behavior mechanism of autonomous driving. Firstly, through the analysis of system similarity, the similarity between autonomous vehicles and moving molecules is sought, and the attraction and repulsion between molecules are applied to the lane-changing process of vehicles to effectively recognize the traffic scene of lane-changing vehicles. Secondly, the molecular interaction potential is introduced to unify the attraction and repulsion, and explore the dynamic influencing factors of lane-changing behavior for vehicles. Moreover, we systematically analyze the interaction relationship in the lane-changing process of Connected and Automated Vehicles, and establish the molecular interaction potential lane-changing model to explore the lane-changing decision-making behavior mechanism. Furthermore, we study the impact of micro lane-changing behavior on macro traffic flow. Finally, the SL2015 lane-changing model and the molecular interaction potential lane-changing model are compared and analyzed by using the SUMO platform. The results show that the speed fluctuation of Connected and Automated Vehicles based on the molecular interaction potential lane-changing model is reduced by 15.5%, and the number of passed vehicles is increased by 3.26% on average, which has better safety, stability, and efficiency. The molecular interaction potential modeling of lane-changing decision-making behavior for Connected and Automated Vehicles comprehensively considers the interaction relationship of dynamic factors in the traffic environment, and scientifically shows the lane-changing decision-making mechanism of Connected and Automated Vehicles.
1. Introduction
Intelligent networking transportation is a new transportation system integrating autonomous vehicles, interconnected networks, and integrated systems. The intelligent networking transportation system is facing the change of autonomous driving technology. At the same time, the networking driving system presents the situation where CAV (Connected and Automated Vehicles) and HV (Human-driven Vehicles) coexist [1]. Compared with HV, CAV rely on intelligent technologies such as sensing elements, wireless communication modules, on-board computing modules, and vehicle power systems to achieve collaborative autonomous sensing, decision-making, and control [2]. After sensing the traffic environment information, the Connected and Automated Vehicles need to select the behavior rules that match the current road traffic environment, that is, to make the autonomous decision-making. Furthermore, the decision-making part is the core stage in the generation process of autonomous vehicle behavior, which reflects a certain degree of intelligence. Moreover, lane-changing decision-making is an important part of autonomous decision-making, which affects the safety and efficiency of vehicles. With the optimization of the automobile industry and the promoting development of relevant intelligent transportation technologies, a series of classic theories and methods have been formed for the lane-changing research of vehicles. Around the lane-changing decision-making, the generation of lane-changing intention and the evaluation of the lane-changing environment are mainly studied.
When the vehicle is restricted during driving, it will have a lane-changing intention. The generation of lane-changing intention includes the pursuit of driving efficiency, obstacle avoidance, and mandatory merging. Wei et al. [3] studied the vehicle’s pursuit of driving efficiency to produce lane-changing intention and selected the strategy with the highest driving efficiency through a prediction and cost function algorithm. Habenicht et al. [4] also studied the intention of lane-changing from the aspect of driving efficiency, and established the lane-changing auxiliary system, while outputting the time, acceleration, and direction of lane-changing. Kim et al. [5] studied the lane-changing intention of the vehicle when avoiding obstacles to ensure safety during driving. Sivaraman et al. [6] studied the lane-changing intention of vehicles in the scene of lane merging, expressed the road environment through the probability driving diagram, and used the dynamic probability diagram to reflect the cost in the process of mandatory lane-changing, so as to solve the decision-making problem in this lane-changing scene. In addition, Bi et al. [7] proposed a novel method for detecting the lane-changing intention by using the lane-changing model based on the queuing network cognitive architecture. Hidas et al. [8] developed the Artemis microscopic traffic simulation system and established a lane-changing intention model to study cooperative lane-changing behavior.
The evaluation of the lane-changing environment is to analyze the feasibility of lane-changing and ensure the safety and efficiency of lane-changing. The evaluation method of a lane-changing environment is mainly based on rules, artificial intelligence, and utility function.
In terms of rules, Gipps [9] creatively established the lane-changing decision-making rules with an acceptable gap when the vehicle is facing obstacles, and specifically divided the lane-changing process, which provides strong support for the subsequent research on lane-changing. Yang et al. [10] took the lead in dividing the lane-changing behavior of vehicles by referring to the lane-changing idea of Gipps and put forward the lane-changing rules with high applicability. Ahmed [11] explored the rules and characteristics of lane-changing and established a lane-changing decision-making behavior model based on the lane-changing gap. Kanaris et al. [12] analyzed the lane-changing environment and established the lane-changing rules based on the safe distance to judge whether the vehicles change lanes safely or not. Wang et al. [13] studied the lane-changing state of vehicles, analyzed the collision avoidance of vehicles from the perspective of minimum safety distance, and improved the safety of lane-changing. Qu et al. [14] introduced the game theory into the lane-changing scene, thus establishing the lane-changing game decision-making behavior rules for autonomous driving vehicles, which improved the rationality of the lane-changing process.
In terms of artificial intelligence, lane-changing research is mainly conducted through the Bayesian network and the Markov decision. Schubert et al. [15] evaluated the current traffic state and calculated the probability of lane-changing by the Bayesian network algorithm. Ulbrich et al. [16] established a lane-changing decision-making model based on a dynamic Bayesian network to evaluate the lane-changing state of vehicles. Wang et al. [17] established an automatic lane-changing auxiliary system and realized the lane-changing decision-making with minimum risk through the Bayesian network. McCall et al. [18] obtained the lane-changing probability by sparse Bayesian algorithm, so as to realize the lane-changing decision-making of vehicles. Maurer et al. [19] established the lane-changing decision-making model of autonomous vehicles by using the Markov decision. Brechtel et al. [20] optimized different lane-changing scenes on the basis of Ulbrich and met different driving characteristics by weighting.
In terms of the utility function, the utility function is used to establish the judgment benchmark, and finally, lane-changing decision-making is made by analyzing factors such as safety and efficiency. Nilsson et al. [21] used a utility function to make lane-changing decision-making and analyzed the target lane, safety distance, and lane-changing time, so as to determine whether the vehicle can perform lane-changing. Toledo et al. [22] integrated mandatory lane-changing and free lane-changing into a utility function to establish a lane-changing model based on utility selection. Zheng et al. [23] established the lane-changing model of utility selection based on acceleration and verified it by simulation experiments. Feng et al. [24] used binomial random utility theory to describe lane-changing decision-making. Long et al. [25] selected speed, distance, and vehicle type as variables to build a lane-changing model based on utility selection. Guo et al. [26] used the layered logit model to analyze the interactive process of lane-changing and realized the maximization of lane-changing utility with the idea of utility theory.
Generally, the research on lane-changing decision-making tends to focus on the fixed critical gap around the lane-changing vehicle, so less attention is paid to the dynamic elements in the lane-changing scene. In addition, most researches on lane-changing also tend to focus on HV, and there are not too many analysis on lane-changing for CAV. An intelligent networking transportation system is a complex system with a heterogeneous integration of factors, multi-subsystem integration, information interconnection, multi-level interoperability, and dynamic real-time control [27]. The components of the system are shown in Figure 1. Under the background of intelligent networking, the lane-changing of autonomous driving vehicles should first meet the safety, and at the same time, it should also take into account the rationality and dynamics. Considering the similarity between vehicles and molecules from the micro perspective, this paper deeply analyzes the micro lane-changing behavior characteristics of Connected and Automated Vehicles, and constructs a lane-changing model of Connected and Automated Vehicles based on molecular interaction potential and dynamic influencing factors, so as to make Connected and Automated Vehicles operate safely and efficiently.
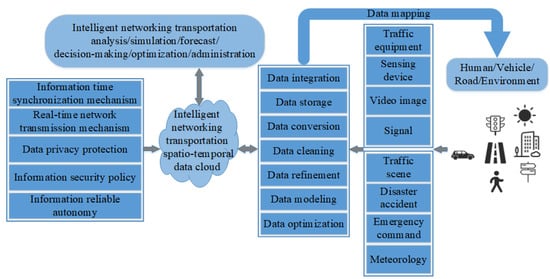
Figure 1.
Construction of intelligent networking transportation system.
2. Analysis of Lane-Changing Behavior
With the promotion of the intelligent networking transportation system, autonomous driving technology has developed rapidly, which alleviates the driving task of drivers to a certain extent, and then makes a trip safe and efficient [28]. Furthermore, Connected and Automated Vehicles can independently obtain information, control, and make decisions in the Internet of Vehicles environment. The Internet of vehicles environment is shown in Figure 2, which includes three parts: intra-vehicle network, inter-vehicle network, and vehicle cloud network. When the CAV in the Internet of Vehicles environment drives on the road, it will take corresponding actions according to the changing traffic environment, and the lane-changing decision-making behavior through autonomous driving operation is the lane-changing behavior of Connected and Automated Vehicles [29]. The lane-changing behavior is a routine behavior of CAV. However, the amount of lane-changing in the process of completing the driving task is uncertain. It is necessary to make the matching lane-changing decision-making according to the specific traffic scene, so as to ensure the safety and efficiency of the driving process [30]. In addition, the lane-changing process of Connected and Automated Vehicles includes the generation of lane-changing intention, the formulation of lane-changing decision-making, and the implementation of the lane-changing process.
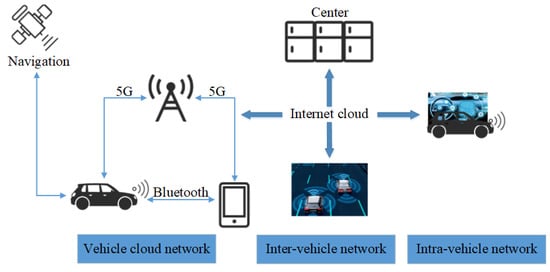
Figure 2.
Internet of Vehicles environment.
Generally speaking, lane-changing behavior is more complex and dangerous than car-following behavior [31], and it is easy to induce traffic accidents, traffic congestion, and other negative conditions. Therefore, in order to make the lane-changing process smoothly, the impact of time and space conditions should be properly considered. In terms of space conditions, lane-changing vehicles have interactivity with surrounding vehicles, so they should maintain a safe and appropriate lane-changing distance during the lane-changing. In terms of time conditions, lane-changing requires a continuous period of time. During this period, Connected and Automated Vehicles implement rapid lane-changing by responding to the traffic environment.
There are two types of lane-changing for general vehicles. One is that vehicles must change lanes when facing obstacles. There is the latest lane-changing position and vehicles need to change lanes before this position [32]. The other lane-changing is to improve the driving environment. The former is mandatory lane-changing, and the latter is free lane-changing [33]. Free lane-changing is an unnecessary lane-changing. Sometimes it will choose to give up lane-changing due to the impact of the traffic environment. As shown in Figure 3, on the one-way double lane, there are FV (Front Vehicle) in front of the target lane, PV (Preceding Vehicle) in front of the current lane, RV (Rear Vehicle) in the rear of the target lane, and LV (Lane-changing Vehicle) in the current lane [34]. They are all Connected and Automated Vehicles, and LV is the lane-changing vehicle. When the LV is driving on the current lane, the speed of the LV is constrained by the PV and does not reach the expected speed, resulting in the intention of lane changing. Besides, in the process of lane changing, LV may conflict with the RV, resulting in a collision, so the lane-changing is finally abandoned. Therefore, the lane-changing of the LV is free lane-changing, which is unnecessary. This paper will also study the free lane-changing behavior of Connected and Automated Vehicles.
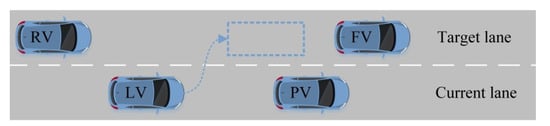
Figure 3.
Free lane-changing scene.
3. Similarity Analysis of System
Molecules have certain similarities with vehicles. Generally speaking, molecules are microscopic particles that can maintain the properties of substances. The fragrance of flowers in nature indicates that there is a causal relationship between moving molecules and macro phenomena. At the same time, the lane-changing of individual vehicles will sometimes induce traffic accidents, and eventually cause traffic congestion of the whole road section at the macro level [35].
Although the motion of molecules is disordered to some extent, their motion states still show the following three situations, as shown in Figure 4. When molecules show a compact motion state, they run dynamically in the environment, which is similar to the synchronized flow in traffic. In the synchronized flow, the traffic flow is large and the traffic operation efficiency is high [36]. When there is a large gap in the movement of molecules, molecules follow the diffusion principle of tending to low density and avoiding high density, and finally, make the state of the overall environment balanced. This situation is similar to that the vehicle changes lanes to meet the speed expectation and better driving state [37]. When the molecular movement is blocked, it will change the direction of movement to avoid obstacles. This situation is similar to that when there are obstacles such as constructions or accidents, the vehicle is forced to change lanes [38]. The traffic environment will act on individual vehicles to make them carry out a series of driving behaviors, and the driving behavior of individual vehicles will react to the traffic environment to make them reach a new state again [39].
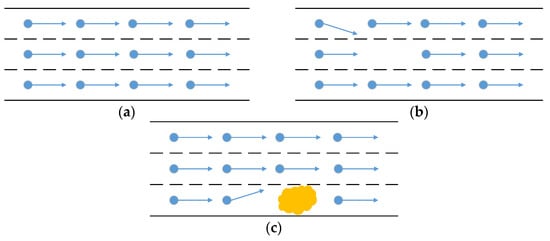
Figure 4.
General molecular motion state. (a) Molecular compact motion state; (b) Molecular large gap motion state; (c) Molecular hindered motion state.
In a molecular system, attraction and repulsion exist at the same time, and their resultant force is expressed as the interaction force between molecules [40]. By comparing the actual molecular distance r with the equilibrium distance r0, the interaction force between molecules can be analyzed. As shown in Figure 5, when r < r0, molecules repulse each other; when r > r0, the molecules attract each other; when r = r0, the interaction force between molecules is zero [41]. Driven by the interaction force, the molecular distance will return to the equilibrium distance after fluctuation. For the traffic system, there are similarities between vehicles and molecules. In the process of driving, the vehicle always expects to maintain a safe and appropriate balance distance with the surrounding vehicles, that is, the dynamic demand safety distance. The vehicle increases the distance to avoid danger and reduces the distance to improve efficiency, so as to complete the driving task harmoniously near a balance distance.
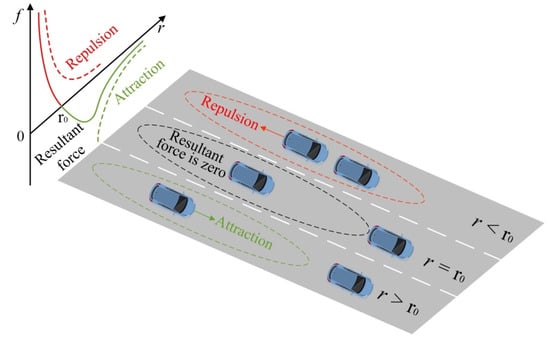
Figure 5.
Interaction force.
According to Newton’s law of motion, an object can realize the change of motion state under external force. Furthermore, two objects that do not contact can also realize the effect of force through the potential field, so as to change the motion state [42]. Generally, no matter molecules or vehicles, they do not contact due to gaps in the process of movement. Therefore, tracing back to the source, we should explore the relevant theories of molecular interaction potential, and study the micro lane-changing characteristics of Connected and Automated Vehicles from the perspective of molecular interaction potential, so as to better show the operation law of macro traffic flow [43].
4. Construction of Lane-Changing Decision-Making Behavior Model Based on Molecular Interaction Potential
The lane-changing process of vehicles is generally complex, so the lane-changing of Connected and Automated Vehicles is modeled based on the molecular interaction potential from the micro point of view. Connected and Automated Vehicles are usually divided into levels, and the higher the level, the higher the degree of intelligence and automation [44]. Combined with the development stage of the Connected and Automated Vehicles, the following descriptions are made to better model the lane-changing decision-making behavior of the Connected and Automated Vehicles:
- The automation level of the Connected and Automated Vehicles is high, and the vehicle can complete the driving operation by itself;
- The Connected and Automated Vehicles can obtain the position and speed of themselves and surrounding vehicles in real time;
- The Connected and Automated Vehicles are unified standard cars and can communicate with each other.
4.1. Generation of Lane-Changing Intention
Generally, the speed of the vehicle in front of the target lane and the speed of the vehicle in front of the current lane play an extremely important role in the generation of lane-changing intention [45]. Based on the speed information obtained by the Connected and Automated Vehicles, the lane-changing intention can be objectively quantified:
In Formula (1), represents the lane-changing intention of LV; is the speed of FV; is the speed of PV.
The lane-changing intention of Connected and Automated Vehicles is expressed by the k value. When , the speed condition of the target lane is better, and then the lane-changing intention of the vehicle is generated. The Connected and Automated Vehicles can have speed gains by changing lanes, so as to complete the driving process efficiently. When , the speed condition of the current lane is still good, so there is no intention to change lanes, and the Connected and Automated Vehicles maintain the car-following state.
4.2. Explanation of Molecular Interaction Potential
The potential field has specific properties, which can affect the objects within its range, and the degree of influence will change with the position of the objects [46]. The object is subjected to the force from the higher potential position to the lower potential position in the potential field, which is equal to the change rate of potential energy in space. Due to the conservation of energy, the potential energy of the object is converted into kinetic energy in this process. As shown in Figure 6, the field source is the prerequisite for forming the potential field space, so that the object existing in the potential field is affected by the force, and the object will change its motion state after receiving the force.
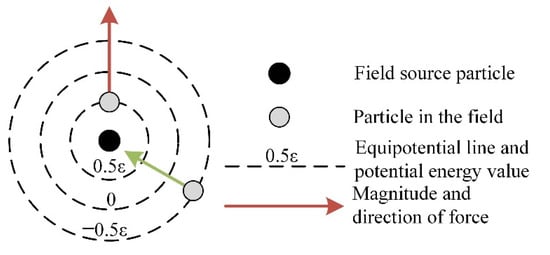
Figure 6.
Distribution diagram of molecular interaction potential field.
In order to study the interaction between micro-objects, scholars constructed a variety of potential field models to describe the relationship between objects. Khatib [47] first proposed the artificial potential field method and applied it to path planning. As shown in Figure 7, the basic idea of the artificial potential field method was to construct the repulsive potential field and the attractive potential field near the target point, and the controlled object moved in the compound potential field of the two potential fields. The repulsive potential field decreased with the increase in the distance between the controlled object and the target object, and the attractive potential field increased with the increase in the distance between the controlled object and the target object. Jia et al. [48] proposed a car-following decision model based on the safety potential field, which can systematically describe the risk in the car-following process. Qu et al. [49] proposed a car-following model based on molecular interaction potential, which can better describe the traffic state. Li et al. [50] established a lane-changing model based on the safety potential field to effectively describe the driving risk in the process of lane-changing and ensure that the vehicle performs the safe lane-changing decision-making. In the traffic field, there are many studies using potential field theory to analyze car-following behavior. In contrast, there are few studies using potential field theory to analyze lane-changing behavior. In addition, in the studies using potential field theory to analyze traffic behavior, the molecular interaction potential has a reasonable structure and the simulation fits reality, so the application effect is good.
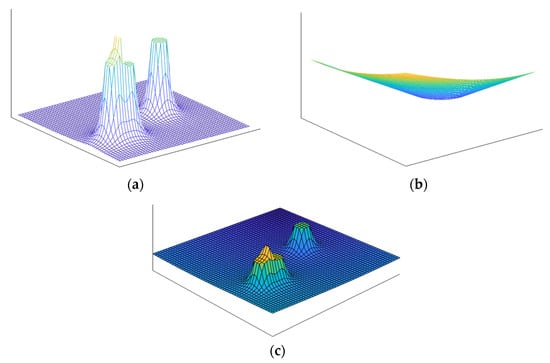
Figure 7.
Description of artificial potential field. (a) Repulsive potential field; (b) Attractive potential field; (c) Compound potential field.
In the molecular interaction potential field, two micro molecules are the field sources of each other. In addition, compared with some potential field functions that separately express the attractive term and the repulsive term, the molecular interaction potential unifies the attraction and repulsion into a whole [51], which can better represent the interaction between micro-objects. Generally, the following molecular interaction potential is used in practice:
In Formula (2), represents the depth of potential well; represents the equilibrium distance; represents the actual distance; is the repulsive term; is the attractive term.
In the Internet of Vehicles environment, Connected and Automated Vehicles can obtain driving rights and make independent decision-making. As shown in Figure 8, the vehicle near the Connected and Automated vehicle is a field source, and the interaction potential generated by it has the effect of force on the Connected and Automated Vehicle. At the same time, the distribution of interaction potential will change with the vehicle distance, and ultimately affect the decision-making behavior of the Connected and Automated Vehicle, thus changing the motion state of the vehicle. Generally speaking, the interaction potential of vehicles can be understood to a certain extent as the artificial potential field.
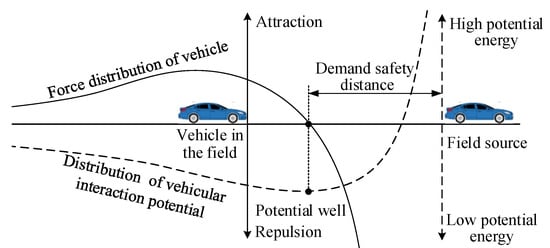
Figure 8.
Distribution diagram of vehicular interaction potential and interaction force.
4.3. Establishment of Molecular Interaction Potential Lane-Changing Model
The lane-changing model is an important basis for lane-changing decision-making of Connected and Automated Vehicles [52]. Based on the characteristics of Connected and Automated Vehicles, safety, efficiency, and stability should be fully considered in the process of establishing a lane-changing model.
The lane-changing process of Connected and Automated Vehicles includes the generation of lane-changing intention, the formulation of lane-changing decision-making, and the implementation of the lane-changing process. Therefore, after the lane-changing intention is generated, the vehicle should analyze the surrounding traffic environment to judge whether the environment is suitable for lane-changing. Usually, the vehicles in the target lane will have a great impact on the lane-changing decision-making behavior of the vehicle in the current lane. As shown in Figure 9, the vehicles running along the center of the lane are compared to molecules, and the force of LV is analyzed based on the molecular interaction, so that the lane-changing decision-making made by the vehicle is more reasonable. In Figure 9, is the force exerted by FV on LV, is the force exerted by RV on LV, and is the resultant force received by LV. represents the horizontal included angle for the connecting line of LV and FV. represents the horizontal included angle for the connecting line of LV and RV. represents the longitudinal distance between LV and FV. represents the longitudinal distance between LV and RV.
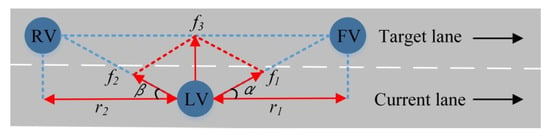
Figure 9.
Diagram of molecular force analysis of lane-changing vehicle.
In the course of lane changing, the Connected and Automated Vehicles should judge the space demand, so as to obtain the appropriate lane-changing distance to ensure safety. As shown in Figure 10, the lane-changing space demand of vehicles includes lateral space demand and longitudinal space demand. On one hand, the lateral space demand of vehicles is reflected in the width of the lane, which is usually well met in the process of lane changing. On the other hand, the longitudinal space demand of vehicles is reflected in the distance provided by the front vehicle and the rear vehicle in the target lane. When the LV changes lanes, it should focus on the longitudinal demand safety distance of the target lane, which is also a research focus of this paper.
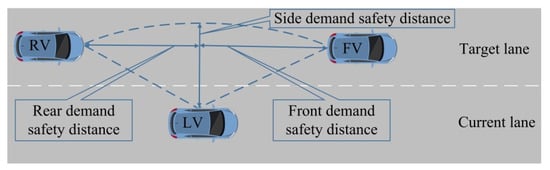
Figure 10.
Diagram of demand safety distance of lane-changing vehicle.
Focusing on the lane-changing process of the LV, the positional relationship between LV and FV is analyzed through the kinematic principle, and the following formula can be obtained:
In Formula (3), represents the longitudinal position of FV at the initial time of lane-changing. represents the longitudinal position of FV at the time of lane-changing completion. represents the longitudinal position of LV at the initial time of lane changing. represents the longitudinal position of LV at the time of lane-changing completion. represents the distance between LV and FV at the initial time of lane changing. represents the distance between LV and FV at the time of lane-changing completion. The positional relationship between LV and FV is shown in Figure 11.
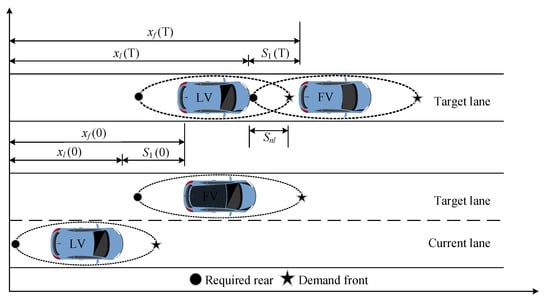
Figure 11.
The positional relationship between LV and FV.
During the movement of Connected and Automated Vehicles, there is a certain functional relationship between the running speed and the headway [53]. After conversion, the following formula can be obtained:
In Formula (4), is the demand safety distance of the vehicle; is the autonomous reaction time of the vehicle, and CAV are generally 0.1 s [54]; represents the running speed of the vehicle; represents the reciprocal of two times of the maximum deceleration for the vehicle, and its value is generally 0.07 m/s2 [55].
Through the analysis of Formula (4), it can be seen that the relationship between the demand safety distance and the running speed is consistent. As shown in Figure 12, the demand safety distance increases when the running speed increases, and the demand safety distance decreases when the running speed decreases. On the one hand, this situation is similar to the phenomenon of “thermal expansion and cold contraction” caused by molecular motion. On the other hand, this situation is also consistent with the operation of vehicles in the real traffic scene.
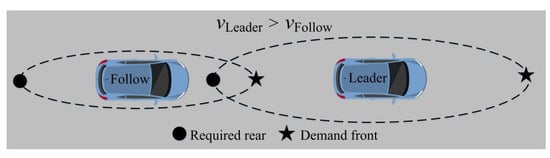
Figure 12.
Diagram of vehicular demand safety distance at different speeds.
Based on the theory of molecular interaction potential, the demand safety distance of the vehicle is combined with the actual distance of vehicles to further obtain the following formula:
In Formula (5), is the saturation coefficient of demand distance; is the actual distance of vehicles.
For the saturation coefficient of demand distance, if LV can safely follow FV after lane-changing, the LV should ensure that the “demand front” of LV on the target lane does not cross the rear boundary of FV, that is, LV can meet . We apply it to Formula (3) and Formula (5) to obtain Formula (6). In addition, while considering safety, consideration should also be given to efficiency. Therefore, the initial expected safety distance between LV and FV can be obtained through Formula (6), as shown in Formula (7).
Through the analysis of Formula (7), it can be concluded that is a dynamic distance, and its size relationship will be affected by the dynamic changes of acceleration, speed, and lane-changing completion time.
Considering the relationship between the initial expected safety distance and the longitudinal distance of vehicles at the initial time of lane-changing, combined with the molecular interaction potential of vehicles [56], the interaction potential between LV and FV at the initial time of lane-changing can be obtained. On this basis, the force exerted by FV on LV at the initial time of lane-changing can be obtained by differentiating with respect to . The acceleration given by FV to LV is finally obtained.
In Formula (10), is the mass of LV.
Since both FV and RV in the target lane will affect the lane-changing decision-making behavior of LV in the current lane, the relationship between LV and RV should also be analyzed after discussing the relationship between LV and FV. The positional relationship between LV and RV is shown in Figure 13.
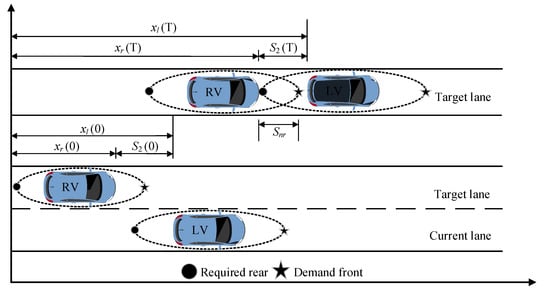
Figure 13.
The positional relationship between LV and RV.
Based on the above analysis process of the relationship between LV and FV during lane-changing, the relationship between LV and RV is also studied by analogy. Therefore, the initial expected safety distance between LV and RV and the acceleration given by RV to LV can be obtained in turn:
Let , , and , then Formulas (10) and (12) can be converted into Formulas (13) and (14), respectively:
On the basis of obtaining the accelerations, the accelerations are decomposed and recombined in combination with Figure 9, and the lateral acceleration and longitudinal acceleration of LV are clearly obtained:
Taking Formulas (13) and (14) into Formulas (15) and (16), the final expressions of and can be obtained:
When , the force on LV is attraction, and the vehicle can use longitudinal acceleration to change the speed for lane changing. When , the force on LV is either repulsion or zero. At this time, the vehicle should give up lane changing and keep driving in the current lane. To sum up, the Connected and Automated vehicle can conduct lane-changing decision-making analysis from the perspective of acceleration [57], so that it can implement lane changing safely and efficiently.
5. Experimental Verification and Discussion
5.1. Platform and Environment of Simulation
Compared with the collection of car-following data, the actual lane-changing data is complex and difficult to achieve, so this paper obtains it through the SUMO platform. SUMO is the micro open-source traffic simulation software. It is internally equipped with DK2008, LC2013, SL2015, and other lane-changing models, which can properly simulate the lane-changing scene of vehicles. On one hand, through the TraCI (Traffic Control Interface) of SUMO, the lane-changing vehicle can be tracked to obtain lane-changing information. On the other hand, SUMO can flexibly cooperate with other platforms to meet specific needs. With the development of intelligent transportation technology, SUMO software has also been applied to the research of Connected and Automated Vehicles, which is of positive significance to promote the development of autonomous driving technology and the optimization of Connected and Automated Vehicles.
5.2. Analysis of Lane-Changing Data
The simulation scene is set as a one-way two lane with the length of 5000 m and the speed limit of 120 km/h. The lane-changing simulation interface is shown in Figure 14. After the Connected and Automated Vehicle makes the decision to choose lane-changing, it will turn on the turn signal light to implement lane-changing.

Figure 14.
Lane-changing simulation interface.
In the simulation process of the SUMO platform, the relevant information about the lane-changing vehicle can be obtained by using the TraCI. Some relevant data are shown in Figure 15.
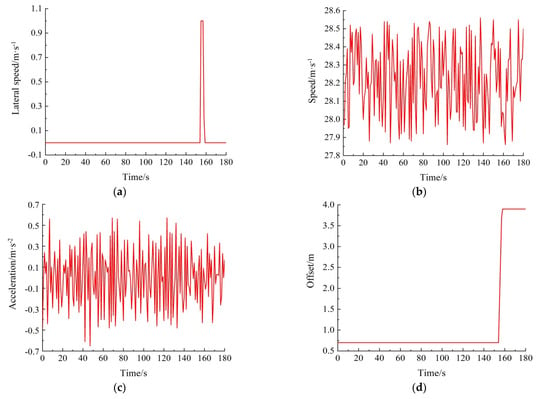
Figure 15.
Information about the lane-changing vehicle. (a) Lateral speed; (b) Speed; (c) Acceleration; (d) Offset.
- (1)
- Figure 15a shows the variation of lateral speed for the lane-changing vehicle. At first, when the vehicle does not change lanes, its lateral speed is zero, and the vehicle keeps driving along the center of the current lane. In the process of lane-changing, the lateral speed of the vehicle begins to change, and the change is to accelerate first and then decelerate. After arriving at the center of the target lane, the lateral speed of the lane-changing vehicle returns to zero. Finally, the vehicle drives in the target lane. It can be seen from the figure that the lane-changing vehicle only changes the lane once.
- (2)
- Figure 15b shows the variation of speed for the lane-changing vehicle. Sometimes the lane-changing vehicle accelerates and sometimes decelerates. Because the vehicle runs on the high-speed road with relatively few obstacles, its speed fluctuation range is relatively small, and it can finally run in a more stable state.
- (3)
- Figure 15c shows the variation of acceleration for the lane-changing vehicle. During the process of lane-changing, the acceleration of the vehicle fluctuates up and down near zero. It can be seen from the figure that the variation range of acceleration is −0.7 m/s2~0.7 m/s2, which enables the vehicle to drive stably with small speed fluctuation. Moreover, the information shown in Figure 15b,c can be mutually verified.
- (4)
- Figure 15d shows the variation of the offset of the right side of the lane-changing vehicle relative to the right side of the road. This offset actually represents the lateral position of the vehicle and can directly reflect the lane-changing information. When the vehicle drives in the current lane, the offset does not change. When the vehicle changes the lane, the offset will change, and the final change is the width of the single lane. It can be seen from the figure that the lane-changing vehicle only changes the lane once. In addition, the information shown in Figure 15a,d can be mutually verified.
5.3. Evaluation of Molecular Interaction Potential Lane-Changing Model
Relevant lane-changing information can be obtained through the SUMO platform. The lane-changing data are used to calibrate the parameters of the molecular interaction potential lane-changing model [58], so that the molecular interaction potential lane-changing model is reasonable and practical. Based on this, the molecular interaction potential lane-changing model can be clarified to evaluate its performance. The calibration of the model parameters is shown in Table 1.

Table 1.
Parameters calibration of the molecular interaction potential lane-changing model.
In the simulation environment of SUMO, the molecular interaction potential lane-changing model is compared with the SL2015 lane-changing model, so as to evaluate the performance of the molecular interaction potential lane-changing model more objectively. SL2015 lane-changing model is the moving model within SUMO, which can realize sub-lane simulation with high lateral resolution. Its additional behavior layer is responsible for maintaining safe lateral gaps, and the required gap can be set by using the vType attribute. Vehicles gradually change lanes according to attributes to achieve a certain lateral alignment. In addition, vehicles will be placed at the exact longitudinal and lateral position to match the specified coordinates, which can be more reasonable in lane-changing decision-making and implementation of the lane-changing process. Additional parameters supported by the SL2015 lane-changing model are shown in Table 2.
Table 2.
Additional parameters supported by the SL2015 lane-changing model.
On the other hand, the characteristic parameters of vehicles under the SL2015 lane-changing model and the molecular interaction potential lane-changing model are shown in Table 3.
Table 3.
Characteristic parameters of vehicles.
As shown in Figure 16, the two groups of lane-changing models are tested to compare and analyze the average speed of lane-changing vehicles, so as to explore the performance of the molecular interaction potential lane-changing model. Figure 16a objectively shows the fluctuation and size relationship of average speed under the two groups of models. In contrast, the average speed under the molecular interaction potential lane-changing model is larger and less fluctuated. On the basis of Figure 16a,b, it further intuitively shows the increase in average speed and the decrease in speed fluctuation degree. The average speed data under the two groups of models are evenly distributed without abnormal values. The three data around the box are the maximum, average, and minimum values of speed from top to bottom. Compared with the SL2015 lane-changing model, the average speed under the molecular interaction potential lane-changing model is increased by 3.26% and the speed fluctuation is reduced by 15.5%. In addition, no collision accident occurred during the simulation. In general, the molecular interaction potential lane-changing model has good security, efficiency, and stability. The molecular interaction potential unifies the attraction and repulsion into a whole so that the vehicle can dynamically adjust its speed when making lane-changing decisions, so as to ensure that the control layer of the Connected and Automated Vehicles can implement lane-changing smoothly.
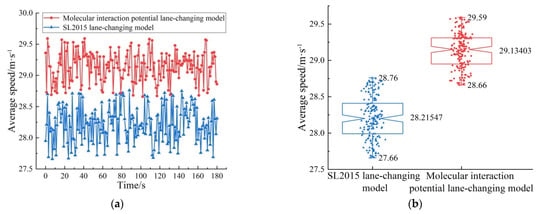
Figure 16.
Comparison of average speed of lane-changing vehicles under different models. (a) Qualitative diagram of average speed; (b) Quantitative diagram of average speed.
On the basis of speed, the number of passed vehicles is further introduced to analyze the performance of the model. As shown in Figure 17, we input the traffic flow in the simulation scene. The range of traffic flow is 1000 veh/h~2000 veh/h. We take the traffic flow of 100 veh/h as the interval, and finally obtain the number of passed vehicles under different traffic flows within 360 s. Figure 17a shows the change trend and size relationship of the number of passed vehicles under the two groups of models. With the continuous increase in traffic flow, the number of passed vehicles under the two groups of models also increases. However, compared with the SL2015 lane-changing model, the number of passed vehicles under the molecular interaction potential lane-changing model is more, and this advantage is more obvious when the traffic flow is greater than 1500 veh/h. Figure 17b shows that the number of passed vehicles under the two groups of models is evenly distributed without abnormal values. In addition, compared with the SL2015 lane-changing model, the number of passed vehicles under the molecular interaction potential lane-changing model is increased by 3.26%. Therefore, it can be concluded from the above analysis that the molecular interaction potential lane-changing model has good road utilization and high efficiency. For the development of Connected and Automated Vehicles, the number of vehicles is increasing, and the demand for road utilization and efficiency is also increasing. Therefore, the molecular interaction potential lane-changing model also has certain adaptability and practical applicability to the changing and developing traffic environment.
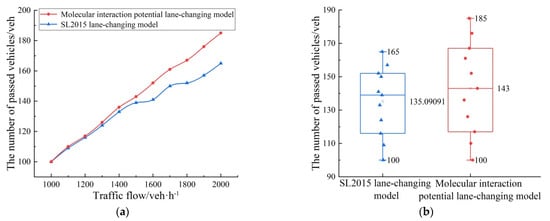
Figure 17.
Comparison of the number of passed vehicles under different models. (a) Qualitative diagram of the number of passed vehicles; (b) Quantitative diagram of the number of passed vehicles.
For the traffic flow running in the target lane, the entry of lane-changing vehicles will cause a certain perturbation. The smaller the impact of perturbation, the more conducive to the efficient operation of traffic flow in the target lane. On this basis, the performance of models is analyzed from the perturbation of the lane-changing vehicle to the traffic flow. A fleet of 20 vehicles is set in the rear of the target lane, and the operation of vehicles follows certain rules [59]. The lane-changing vehicle running in the current lane looks for opportunities to change lanes under the lane-changing rules of the SL2015 lane-changing model and molecular interaction potential lane-changing model. As shown in Figure 18, after the vehicles in the fleet are disturbed by the lane-changing vehicle, the speed fluctuation gradually propagates backward and the intensity gradually decreases, which is also in line with the actual situation. However, the perturbation of lane-changing vehicles to the traffic flow after successful lane-changing is different between the two lane-changing models. The lane-changing vehicle under the molecular interaction potential lane-changing model will be affected by the interaction potential of vehicles of the target lane. When , the force on the lane-changing vehicle is attraction, and the vehicle starts to change lanes. Compared with the SL2015 lane-changing model, the lane-changing vehicle under the molecular interaction potential lane-changing model has less perturbation to the traffic flow of the target lane. After the traffic flow of the target lane is disturbed by the lane-changing vehicle under the molecular interaction potential lane-changing model, it can return to the previous driving state in a short time, and the overall speed fluctuation is also small, which makes the traffic flow run in a more stable state.
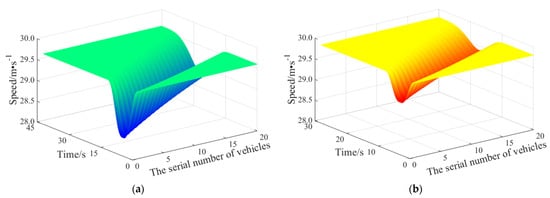
Figure 18.
Comparison of perturbation of lane-changing vehicles under different models. (a) Perturbation under SL2015 lane-changing model; (b) Perturbation under molecular interaction potential lane-changing model.
In general, the molecular interaction potential lane-changing model has good stability and efficiency. The lane-changing vehicle under the molecular interaction potential lane-changing model is good at choosing the lane-changing time and making friendly lane-changing, which has less perturbation to the traffic flow of the target lane. It will also alleviate the problem of traffic congestion to a certain extent.
6. Conclusions
Different from the traditional lane-changing decision-making mechanism focusing on the fixed critical gap, this paper comprehensively considers the dynamic factors in the lane-changing scene. The lane-changing behavior of Connected and Automated Vehicles is systematically analyzed, and the lane-changing decision-making mechanism of Connected and Automated Vehicles is established based on the molecular interaction potential. Through relevant theoretical analysis and simulation experiments, the following main conclusions are obtained:
- Connected and Automated Vehicles have the characteristics of interactivity and dynamics. By analyzing its similarity with molecules, the molecular interaction potential theory is applied to the lane-changing scene, and the molecular interaction potential lane-changing model is established, which scientifically shows the lane-changing characteristics of the Connected and Automated Vehicles.
- The molecular interaction potential lane-changing model unifies the attraction and repulsion into a whole while considering the dynamic influencing factors, so as to form the reasonable lane-changing decision-making mechanism, so that the Connected and Automated Vehicles can implement lane-changing safely and efficiently. The experimental results show that, compared with the SL2015 lane-changing model, the average speed under the molecular interaction potential lane-changing model is increased by 3.26%, the speed fluctuation is reduced by 15.5%, and the number of passed vehicles is increased by 3.26%. In addition, there is no collision accident and the perturbation of lane-changing vehicle to the traffic flow of the target lane is small. Therefore, the molecular interaction potential lane-changing model has good safety, stability, and road utilization.
In this paper, the lane-changing behavior is explored with molecular interaction potential. The research results can provide a new view for understanding the lane-changing characteristics. By extension, the molecular interaction potential lane-changing model is adaptable to the development of Connected and Automated Vehicles. With the development of the courier industry, Connected and Automated Vehicles are used to deliver goods, which will reduce the workload of couriers. In the process of transporting goods, the Connected and Automated Vehicles will face the lane changing. Meanwhile, this paper can provide a theoretical basis and technical support for the lane-changing research of Connected and Automated Vehicles to a certain extent, which can also promote the development of the courier industry. However, there are some limitations in this research. This paper only studies the lane-changing decision-making behavior in the free lane-changing scene. Therefore, more lane-changing scenes, such as the mandatory lane-changing scene, should be studied on this basis. Mandatory lane-changing is a necessary lane-changing for vehicles to reach the destination. Its lane-changing reasons mainly include avoiding obstacles and road merging. There are some bottleneck points in the mandatory lane-changing scene. We should explore it to alleviate traffic congestion. With the gradual popularization of Connected and Automated Vehicles, we should further consider the diversified lane-changing influencing factors and the complex traffic environment, and continuously improve the adaptability of the molecular interaction potential lane-changing model, so as to promote the development of intelligent transportation technology.
Author Contributions
Conceptualization, K.Z. and D.Q.; methodology, K.Z.; software, S.D.; validation, K.Z., D.Q. and H.S.; formal analysis, K.Z.; resources, T.W.; writing—original draft preparation, K.Z.; writing—review and editing, D.Q.; supervision, D.Q. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China, grant number 51678320.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Ali, Y.; Zheng, Z.; Haque, M.M.; Yildirimoglu, M.; Washington, S. A Complete Lane-changing Decision Modeling Framework for the Connected and Traditional Environments. Transp. Res. Part C Emerg. Technol. 2021, 128, 103162. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, F.; Wang, W.; Meng, F.; Zhang, D.; Wang, H. Prediction of Clearance Vibration for Intelligent Vehicles Motion Control. Sustainability 2022, 14, 6698. [Google Scholar] [CrossRef]
- Wei, J.; Dolan, M.; Litkouhi, B. A Prediction and Cost Function-Based Algorithm for Robust Autonomous Freeway Driving. In Proceedings of the 2010 IEEE Intelligent Vehicles Symposium, La Jolla, CA, USA, 21–24 June 2010. [Google Scholar]
- Stefan, H.; Hermann, W.; Sven, B. A Maneuver-based Lane Change Assistance System. In Proceedings of the 2011 IEEE Intelligent Vehicles Symposium, Baden, Germany, 5–9 June 2011. [Google Scholar]
- Kim, D.; Moon, S.; Park, J. Design of an Adaptive Cruise Control/Collision Avoidance with Lane Change Support for Vehicle Autonomous Driving. In Proceedings of the 2009 ICCAS-SICE, Fukuoka, Japan, 18–21 August 2009. [Google Scholar]
- Sayanan, S.; Mohan, T. Dynamic Probabilistic Drivability Maps for Lane Change and Merge Driver Assistance. IEEE Trans. Intell. Transp. 2014, 15, 2063–2073. [Google Scholar]
- Bi, L.; Wang, C.; Yang, X. Detecting Driver Normal and Emergency Lane-Changing Intentions with Queuing Network-Based Driver Models. Int. J. Hun. Comput. Int. 2015, 31, 139–145. [Google Scholar] [CrossRef]
- Hidas, P. Modelling Lane Changing and Merging in Microscopic Traffic Simulation. Transp. Res. C Emer. 2002, 10, 351–371. [Google Scholar] [CrossRef]
- Gipps, P. A Model for the Structure of Lane Changing Decisions. Transp. Res. B Meth. 1986, 20, 403–414. [Google Scholar] [CrossRef]
- Yang, Q.; Koutsopoulos, H. A Microscopic Traffic Simulator for Evaluation of Dynamic Traffic Management Systems. Transp. Res. C Emer. Technol. 1996, 4, 113–129. [Google Scholar] [CrossRef]
- Ahmed, I. Modeling Drivers’ Acceleration and Lane Change Behavior. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1999. [Google Scholar]
- Kanaris, A.; Kosmatopoulos, B.; Loannou, A. Strategies and Spacing Requirements for Lane Changing and Merging in Automated Highway Systems. IEEE Trans. Veh. Technol. 2001, 50, 1568–1581. [Google Scholar] [CrossRef]
- Wang, R.-B.; You, F.; Cui, G.-J. Analysis on Lane-Changing Safety of Vehicle. J. Jilin Univ. Technol. 2005, 2, 179–182. [Google Scholar]
- Qu, D.-Y.; Hei, K.-X.; Guo, H.-B. Game Behavior and Model of Lane-Changing on the Internet of Vehicles Environment. J. Jilin Univ. 2021, 1, 1–11. [Google Scholar]
- Schubert, R.; Schulze, K.; Wanielik, G. Situation Assessment for Automatic Lane-Change Maneuvers. IEEE Trans. Intell. Transp. Syst. 2010, 11, 607–616. [Google Scholar] [CrossRef]
- Ulbrich, S.; Maurer, M. Situation Assessment in Tactical Lane Change Behavior Planning for Automated Vehicles. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015. [Google Scholar]
- Wang, J.-Q.; Chai, R.; Cao, N. Modeling Highway Lane Changing Using Bayesian Networks. Mat. Sci. Eng. R 2014, 505, 1143–1147. [Google Scholar] [CrossRef]
- Mccall, C.; Wipf, P.; Trivedi, M. Lane Change Intent Analysis Using Robust Operators and Sparse Bayesian Learning. IEEE Trans. Intell. Transp. 2007, 8, 431–440. [Google Scholar] [CrossRef] [Green Version]
- Maurer, M.; Ulbrich, S. Probabilistic Online POMDP Decision Making for Lane Changes in Fully Automated Driving. In Proceedings of the 2013 IEEE 16th International Conference on Intelligent Transportation Systems, The Hague, The Netherlands, 6–9 October 2013. [Google Scholar]
- Brechtel, S.; Gindele, T.; Dillmann, R. Probabilistic Decision-Making under Uncertainty for Autonomous Driving Using Continuous POMDPs. In Proceedings of the 2014 IEEE 17th International Conference on Intelligent Transportation Systems, Qingdao, China, 8–11 October 2014. [Google Scholar]
- Nilsson, J.; Silvlin, J.; Brannstrom, M. If, When, and How to Perform Lane Change Maneuvers on Highways. IEEE Intel. Transp. Syst. 2016, 8, 68–78. [Google Scholar] [CrossRef]
- Toledo, T.; Koutsopoulos, N.; Ben, M. Estimation of an Integrated Driving Behavior Model. Transport. Res. C Emer. 2009, 17, 365–380. [Google Scholar] [CrossRef]
- Zheng, H.; Rong, J.; Ren, F. A Lane Change Model Based on Utility Selection. J. Highw. Transp. Res. Dev. 2004, 21, 88–91. [Google Scholar]
- Feng, Y.; Pei, Y.; Zhang, Y. Calibration of Selective Lane Change Model Based on Close-range Photogrammetry. J. Harbin Inst. Technol. 2007, 39, 1292–1296. [Google Scholar]
- Long, X.; Tan, Y. Microscopic Simulation of Autonomous Lane Transformation Model. J. Highw. Transp. Res. Dev. 2012, 29, 115–119. [Google Scholar]
- Guo, H.-B.; Qu, D.-Y.; Hong, J.-L. Vehicle Lane Changing Interaction Behavior and Decision Model Based on Utility Theory. Sci. Technol. Eng. 2020, 20, 12185–12190. [Google Scholar]
- Zhang, L.; Shen, G.; Qin, X. Information Physics Mapping and System Construction in Intelligent Network Transportation System. J. Tongji Univ. 2022, 50, 79–86. [Google Scholar]
- Luo, Q.; Zang, X.; Cai, X.; Gong, H.; Yuan, J.; Yang, J. Vehicle Lane-Changing Safety Pre-Warning Model under the Environment of the Vehicle Networking. Sustainability 2021, 13, 5146. [Google Scholar] [CrossRef]
- Yang, J.-R. Driving Behavior Characteristics and Models under Vehicle-Infrastructure Cooperation. Master’s Thesis, Qingdao University of Technology, Qingdao, China, 2019. [Google Scholar]
- Li, L.-H.; Gan, J.; Zhou, K. A Novel Lane-Changing Model of Connected and Automated Vehicles: Using the Safety Potential Field Theory. Physica A 2020, 559, 125039. [Google Scholar] [CrossRef]
- Sun, Y.-Q.; Ge, H.-X.; Cheng, R.-J. An Extended Car-Following Model Considering Driver’s Memory and Average Speed of Preceding Vehicles with Control Strategy. Physica A 2019, 521, 752–761. [Google Scholar] [CrossRef]
- Hung, X.-C.; Tang, Y.-S.; Liu, G.-J. Analysis of Driver Lane Change Behavior. Aut. Appl. Technol. 2017, 18, 147–148. [Google Scholar]
- Hei, K.-X.; Qu, D.-Y.; Guo, H.-B. Modeling Lane-Changing Behavior in Mixed Traffic Flow Connected Environment Based on Game Behavior. Sci. Technol. Eng. 2021, 21, 2495–2501. [Google Scholar]
- Wen, C. Coupled Game Theory-Kinematics Decision Making for Automatic Driving Lane Change. Master’s Thesis, Southwest Jiaotong University, Chengdu, China, 2019. [Google Scholar]
- Pan, W.; Xue, Y.; He, H.-D. Impacts of Traffic Congestion on Fuel Rate, Dissipation and Particle Emission in a Single Lane Based on Nasch Model. Physica A 2018, 503, 154–162. [Google Scholar] [CrossRef]
- Fu, D.-J.; Li, Q.-L. Statistical Analysis of Velocity and Vehicle Spacing in Synchronous Flow Region. J. Anqing Norm. Univ. 2022, 28, 19–25. [Google Scholar]
- Zhou, T.; Zheng, L.-J.; Liu, W.-N. Congestion Control Car-Following Model Considering the Steady-State Expected Speed Effect of Multiple Vehicles. J. Chongqing Univ. 2018, 41, 51–60. [Google Scholar]
- Ou, H.; Tang, T.-Q. Impacts of Moving Bottlenecks on Traffic Flow. Physica A 2018, 500, 131–138. [Google Scholar] [CrossRef]
- Yu, S.-W.; Zhao, X.-M.; Xu, Z.-G. The Effects of Velocity Difference Changes with Memory on the Dynamics Characteristics and Fuel Economy of Traffic Flow. Physica A 2016, 461, 613–628. [Google Scholar] [CrossRef]
- Chen, D.; Hou, L.; Zhu, Q.-Y. Tire-ground Interaction Force Model and Its Parameter Identification Considering Tire Geometry and Pressure. J. Mech. Eng. 2020, 56, 174–183. [Google Scholar]
- Yang, L.-H.; Wang, H.; Li, S. Car-Following Model with Improved Molecular Dynamics. J. Chongqing Univ. 2021, 44, 26–33. [Google Scholar]
- Geng, Z.-F.; Wu, Y.-G. Motion Path Planning Based on Potential Field. Robot 1992, 5, 38–43. [Google Scholar]
- Reuschel, A. Vehicle Movements in a Platoon. Oes. Ing-Atchir. 1950, 4, 193–215. [Google Scholar]
- Li, Y.-K.; Liu, Y. Development Status and Suggestions of Domestic Intelligent Connected Vehicles. Aut. Parts 2016, 41, 56–59. [Google Scholar]
- Meng, X. Research on the Simulation of the Weaving Area on the Urban Expressway under the Mixed Traffic Environment. Master’s Thesis, Jilin University, Changchun, China, 2019. [Google Scholar]
- Ma, G.-Q.; Niu, R.-X.; Li, L.-L. Non-Degree Gradient Ratio Function of Gravity and Magnetic Data for Field-Source Correlation Imaging Method Study. Prog. Geophys. 2021, 36, 2062–2068. [Google Scholar]
- Khatib, O. Real-Time Obstacle Avoidance for Manipulators and Mobile Robots. Ind. Robot 1986, 5, 90–98. [Google Scholar]
- Jia, Y.-F.; Qu, D.-Y.; Zhao, Z.-X. Car-Following Behavior Decision and Model of Networked Autonomous Vehicle Based on Safety Potential Field. J. Transp. Syst. Eng. Inf. Technol. 2022, 22, 85–97. [Google Scholar]
- Qu, D.-Y.; Li, J.; Liu, C. Dynamic Characteristics and Model of Vehicle Flow Based on Molecular Dynamics. J. Transp. Syst. Eng. Inf. Technol. 2017, 17, 188–194. [Google Scholar]
- Li, L.-H.; Gan, J.; Qu, X.; Ran, B. Vehicle Lane Change Model Based on Safety Potential Field Theory in Intelligent Network Environment. China J. Highw. Transp. 2021, 34, 184–195. [Google Scholar]
- Zhao, Z.-X.; Jia, Y.-F. Car-Following Dynamics Characteristics and Model Based on Lennard-Jones Potential. J. Jilin Univ. 2022, 1, 5274056. [Google Scholar]
- Liang, W.-B. Research on Lane-Changing Decision of Autonomous Vehicles in the Connected Environment. Master’s Thesis, Dalian University of Technology, Dalian, China, 2018. [Google Scholar]
- Shi, B.-Y.; Yang, X.-G.; Yu, X.-F. Modeling and Simulation of Discretionary Lane-Change Considering the Combination with the Car-Following Model. J. Transp. Sci. Eng. 2009, 25, 91–96. [Google Scholar]
- Qiu, X.-P.; Ma, L.; Zhou, X.-X.; Yang, D. Study on Mixed Traffic Flow of Manual-Automatic Driving Based on Safety Distance. J. Transp. Syst. Eng. Inf. Technol. 2016, 16, 101–108. [Google Scholar]
- Bing, Q.-C. Molecular Dynamics Characteristics and Models of Vehicle Lane Changing Interaction Behavior. J. Transp. Syst. Eng. Inf. Technol. 2019, 19, 68–74. [Google Scholar]
- Li, J.; Liu, C. Car-Following Characteristics and Its Models Based on Molecular Dynamics. J. Highw. Transp. Res. Dev. 2018, 35, 126–131. [Google Scholar]
- Martin, T.; Arne, K. Estimating Acceleration and Lane-Changing Dynamics from Next Generation Simulation Trajectory Data. Transport. Res. Rec. 2008, 1, 90–101. [Google Scholar]
- Li, J. Study on Traffic Flow Characteristics and Its Model Based on Molecular Dynamics. Master’s Thesis, Qingdao University of Technology, Qingdao, China, 2018. [Google Scholar]
- Qu, D.-Y.; Yang, J.; Chen, X.-F. Molecular Kinetics Behavior of Car-Following and Its Model. J. Jilin Univ. 2012, 42, 1198–1202. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).