
The Impact of V2G Charging/Discharging Strategy on the Microgrid Environment Considering Stochastic Methods

 ,
,  ,
,  , ,
, ,  ,
,  and
and 
Abstract
:1. Introduction
- The primary goal of the proposed system is to provide an algorithm for EV charging and discharging that adequately addresses the issue of peak power demand.
- To forecast EVs use, the proposed stochastic techniques were applied to charging and discharging algorithms.
- The novel method employs stochastic algorithms with a maximized extensive index and considers a standard battery to simulate the traveling behavior of big-scale EVS over extended time periods.
- The proposed algorithm intends to use V2G technology to control excessive power consumption during peak hours.
- The study calculates the charging impacts by creating several EV charging scenarios dependent on charging patterns promoted by vehicle travel behavior in order to incorporate the new charging approach.
- When compared to traditional pricing schemes, the proposed algorithm demonstrates a considerable improvement.
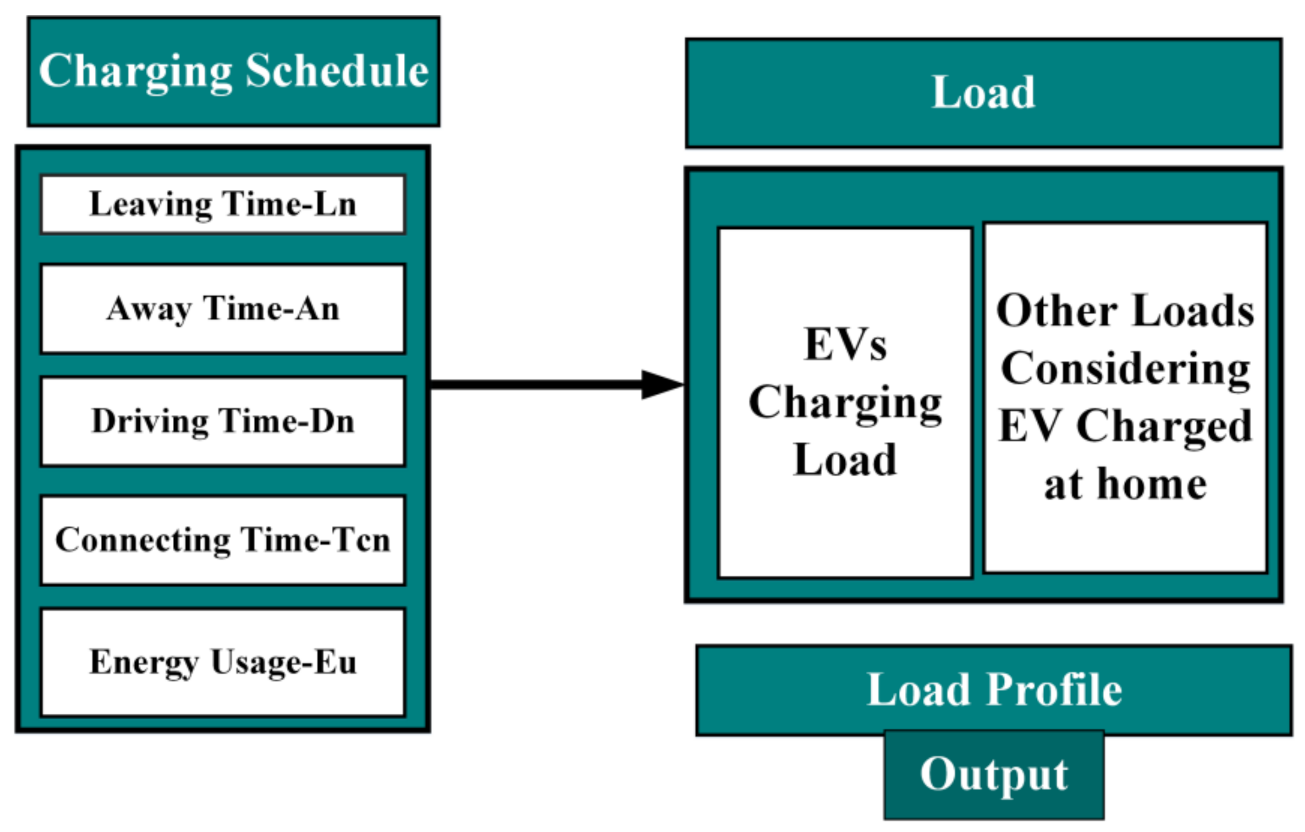
2. Features of Aggregated EVs Integrated with the Grid
Major Factors Affecting Charging Load Patterns for Electric Vehicles
3. Performance of Electrical Vehicle Charging
3.1. Monte Carlo Simulation Markov Chain (MCSMC)
3.2. Model-1 for Electric Vehicle Charging
3.3. EV Mobility and Recharging Flexibility
3.4. Electrical Vehicle Model 2
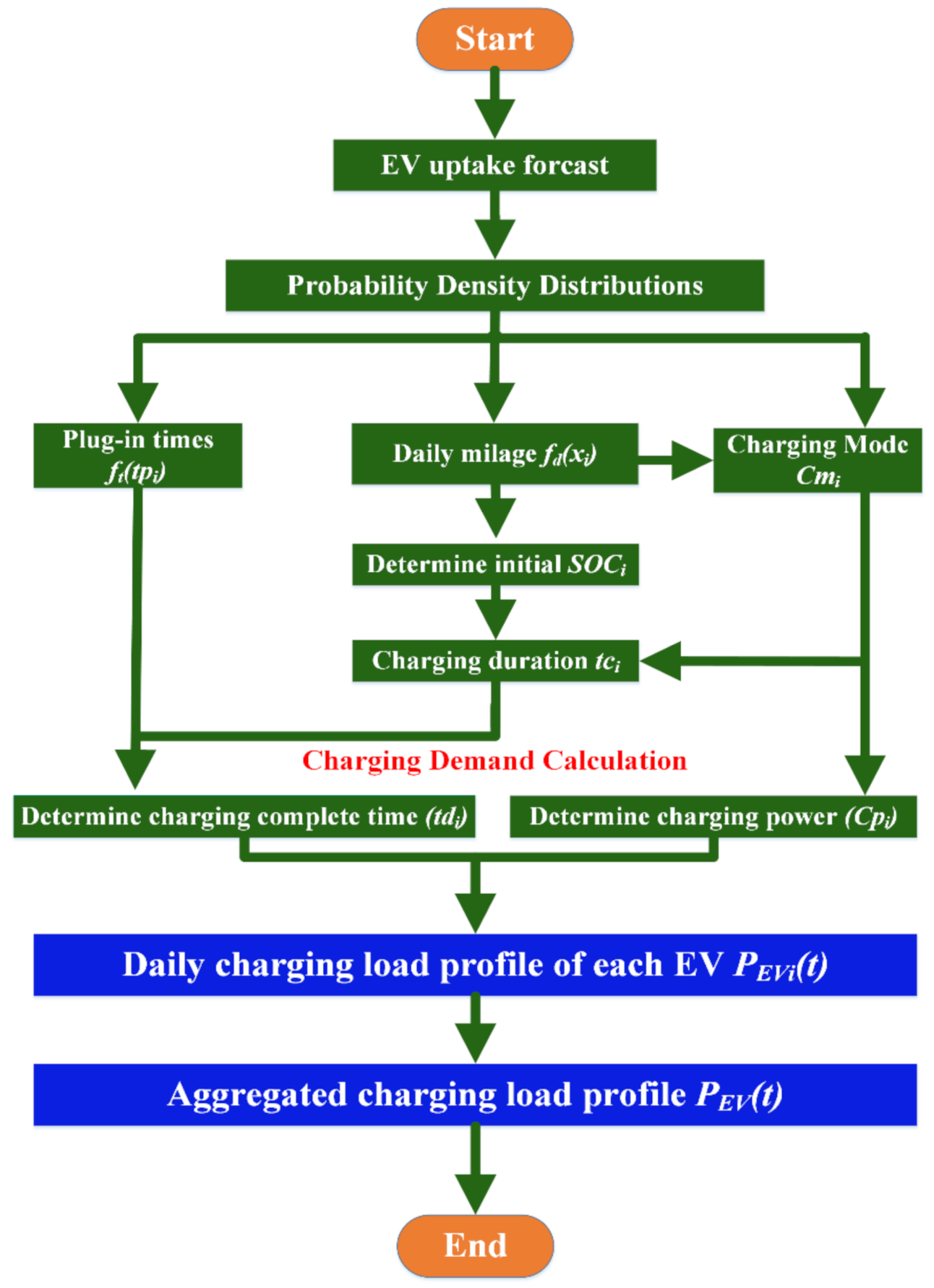
Electrical Vehicle Profile Estimation
4. Results and Discussions
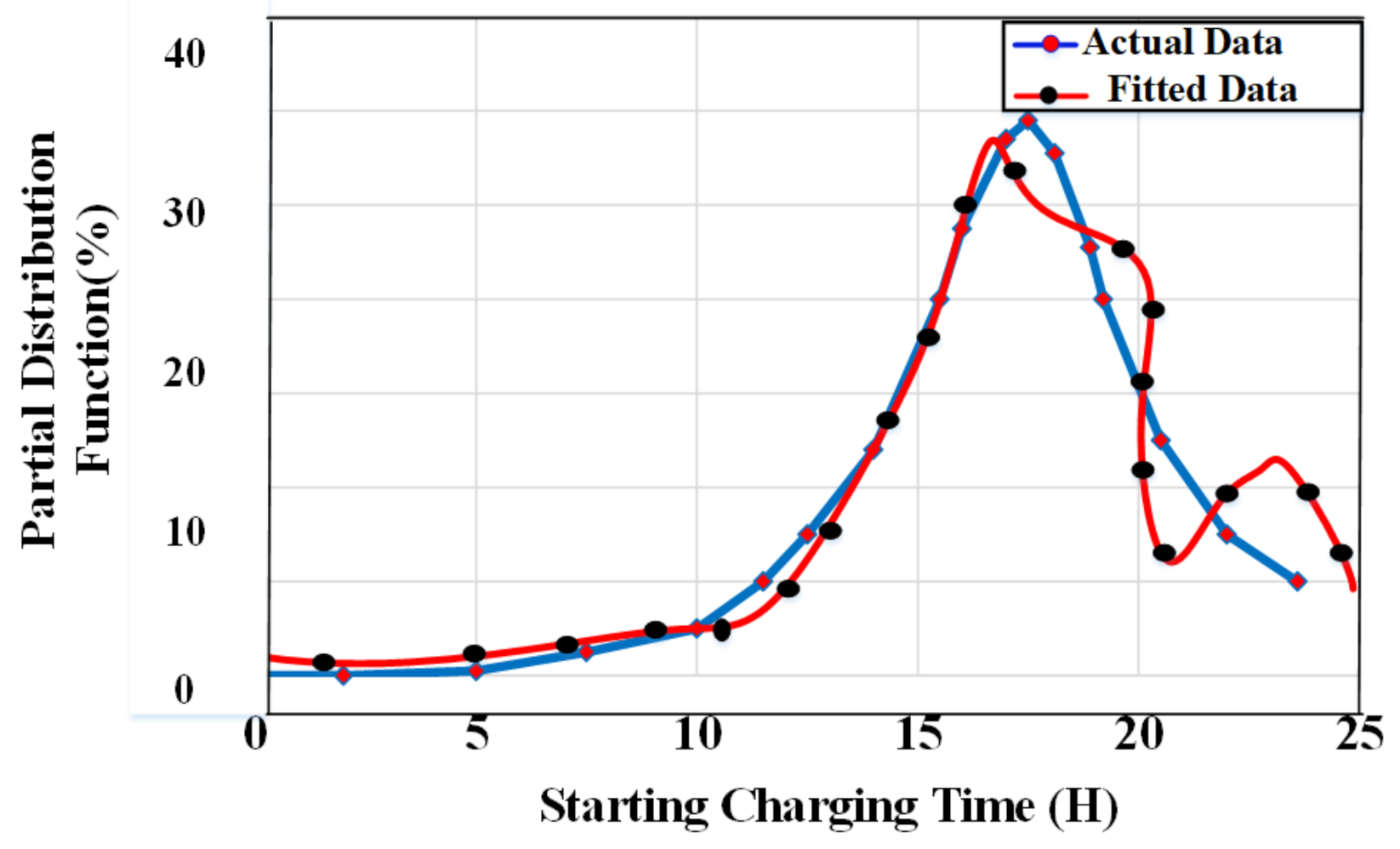
4.1. Model Fitting Using a Probability Distribution for Traveling Parameters
4.2. Case Studies 1 and 2: The Number of Daily Trips Made and Their Intervals
4.3. Case Study 3: Each Trip’s Mileage
4.4. Case Study 4: Daily Departure Time
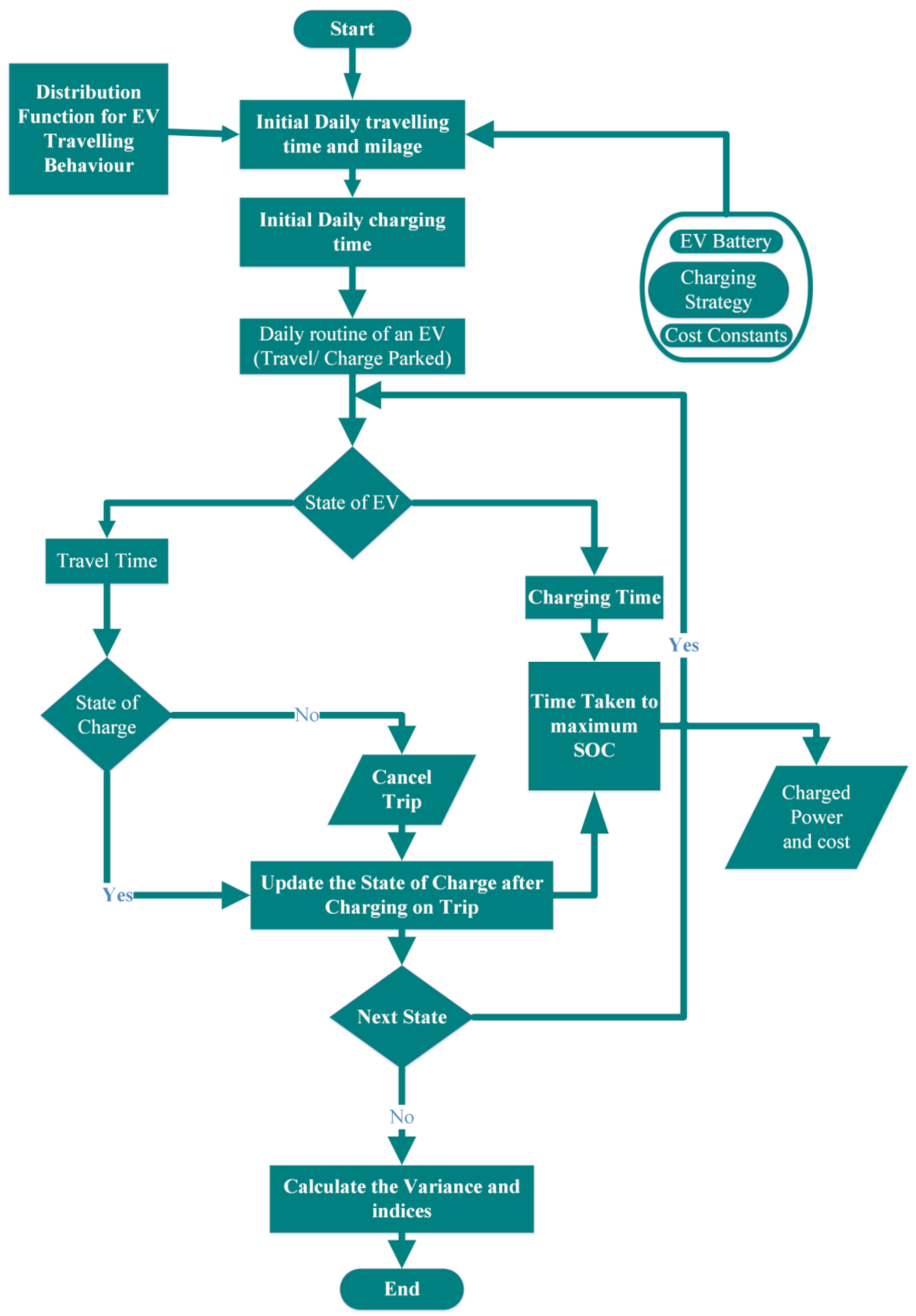
- The daily use of private EVs is distributed using a log-normal distribution.
- It is anticipated that the state of charge of the EV’s battery should be more than 0.2 at all times.
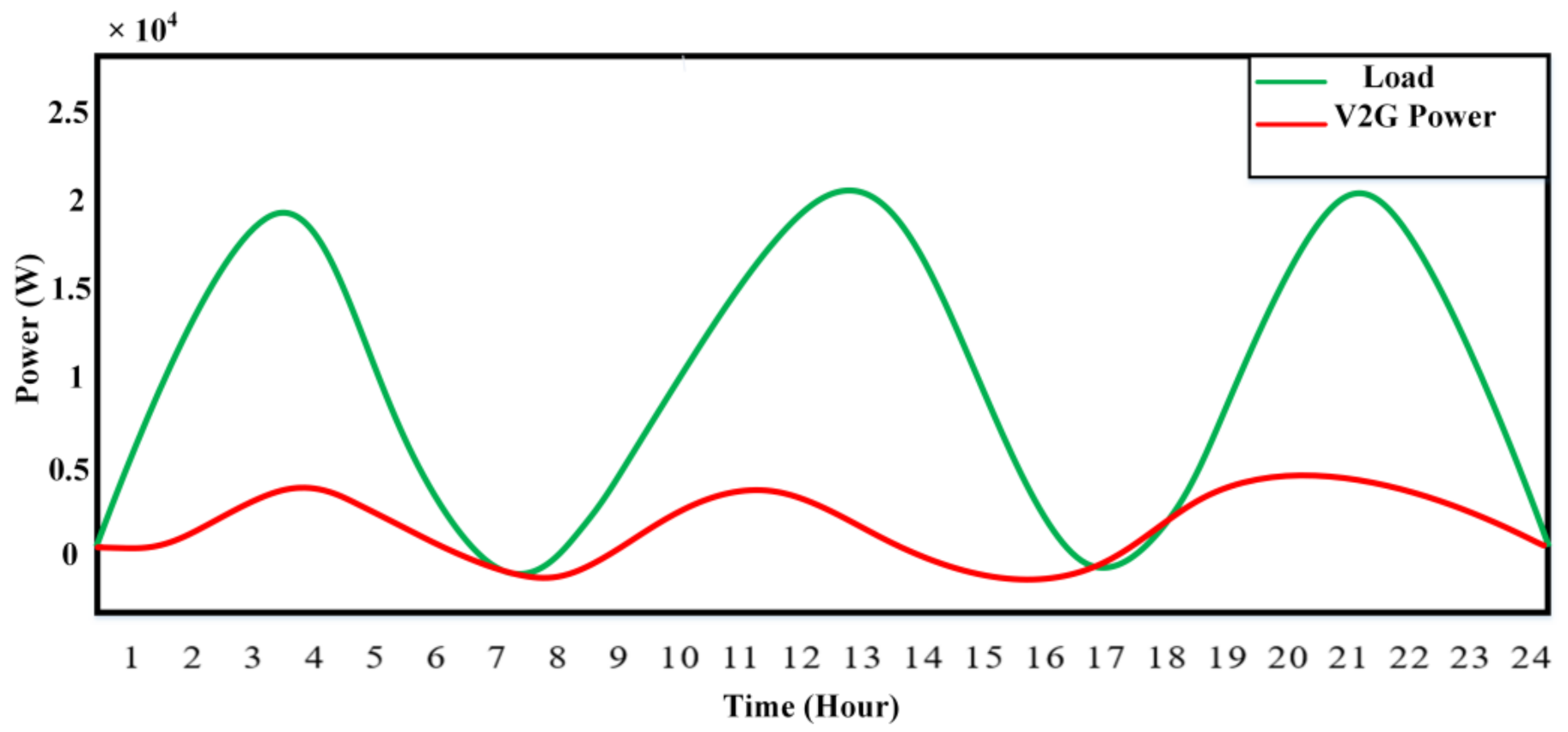
- As illustrated in the image, specific time periods were selected for performing the EV charging/discharging operations.
- It is anticipated that equal distribution meets with the initial condition of the EV charging and discharging process.
- Time restrictions were not considered while charging.
- The electric vehicle’s battery will keep charging until the state of charge is ≥ 0.9.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| V2G | Vehicle to Grid |
| G2V | Grid to Vehicle |
| EV | Electric Vehicle |
| EVC | Electric Vehicle Charging |
| MCS | Monte Carlo Simulation |
| SOC | State of charge |
| HDI | High-dimensional integral |
| MCSMC | Monte Carlo Simulation Markov chain |
| FDI | Finite-dimensional integral |
| Probability distribution function | |
| Probability density function | |
| MLE | Maximum likelihood estimation |
| CSO | Charging station operator |
| CS | Electric Vehicle operator |
| EVA | Electric vehicle aggregator |
| EV V2G | Electric vehicle Vehicle to Grid |
| RER | Renewable energy resources |
| DGs | Distributed generations |
| DGRs | Distributed generations resources |
| CSS | Charging station system |
| BES | Battery storage system |
References
- Zhang, N.; Yu, K.; Chen, Z. How does urbanization affect carbon dioxide emissions? A cross-country panel data analysis. Energy Policy 2017, 107, 678–687. [Google Scholar] [CrossRef]
- Habib, S.; Khan, M.M.; Abbas, F.; Numan, M.; Ali, Y.; Tang, H.; Yan, X. A framework for stochastic estimation of electric vehicle charging behavior for risk assessment of distribution networks. Front. Energy 2020, 14, 298–317. [Google Scholar] [CrossRef]
- Ritter, A.; Widmer, F.; Niam, J.W.; Elbert, P.; Onder, C. Real-Time Graph Construction Algorithm for Probabilistic Predictions in Vehicular Applications. IEEE Trans. Veh. Technol. 2021, 70, 5483–5498. [Google Scholar] [CrossRef]
- Tushar, M.H.K.; Zeineddine, A.W.; Assi, C. Demand-side management by regulating charging and discharging of the EV, ESS, and utilizing renewable energy. IEEE Trans. Ind. Inform. 2017, 14, 117–126. [Google Scholar] [CrossRef]
- ur Rehman, A.; Ali, M.; Iqbal, S.; Shafiq, A.; Ullah, N.; Otaibi, S.A. Artificial Intelligence-Based Control and Coordina-tion of Multiple PV Inverters for Reactive Power/Voltage Control of Power Distribution Networks. Energies 2022, 15, 6297. [Google Scholar] [CrossRef]
- Xie, S.; Hu, X.; Xin, Z.; Li, L. Time-Efficient Stochastic Model Predictive Energy Management for a Plug-In Hybrid Electric Bus with an Adaptive Reference State-of-Charge Advisory. IEEE Trans. Veh. Technol. 2018, 67, 5671–5682. [Google Scholar] [CrossRef]
- Di Somma, M.; Graditi, G.; Siano, P. Optimal bidding strategy for a DER aggregator in the day-ahead market in the presence of demand flexibility. IEEE Trans. Ind. Electron. 2018, 66, 1509–1519. [Google Scholar] [CrossRef]
- Habib, S.; Khan, M.M.; Abbas, F.; Ali, A.; Hashmi, K.; Shahid, M.U.; Bo, Q.; Tang, H. Risk Evaluation of Distribution Networks Considering Residential Load Forecasting with Stochastic Modeling of Electric Vehicles. Energy Technol. 2019, 7, 1900191. [Google Scholar] [CrossRef]
- Iqbal, S.; Xin, A.; Jan, M.U.; Abdelbaky, M.A.; Rehman, H.U.; Salman, S.; Rizvi, S.A.A.; Aurangzeb, M. Aggregation of EVs for Primary Frequency Control of an Industrial Microgrid by Implementing Grid Regulation & Charger Controller. IEEE Access 2020, 8, 141977–141989. [Google Scholar] [CrossRef]
- Zendegan, S.; Ferrara, A.; Jakubek, S.; Hametner, C. Predictive Battery State of Charge Reference Generation Using Basic Route Information for Optimal Energy Management of Heavy-Duty Fuel Cell Vehicles. IEEE Trans. Veh. Technol. 2021, 70, 12517–12528. [Google Scholar] [CrossRef]
- Hu, X.; Martinez, C.M.; Yang, Y. Charging, power management, and battery degradation mitigation in plug-in hybrid electric vehicles: A unified cost-optimal approach. Mech. Syst. Signal Process. 2017, 87, 4–16. [Google Scholar] [CrossRef]
- Cai, S.; Matsuhashi, R. Model Predictive Control for EV Aggregators Participating in System Frequency Regulation Market. IEEE Access 2021, 9, 80763–80771. [Google Scholar] [CrossRef]
- Blanco, H.; Faaij, A. A review at the role of storage in energy systems with a focus on Power to Gas and long-term storage. Renew. Sustain. Energy Rev. 2018, 81, 1049–1086. [Google Scholar] [CrossRef]
- Golchoubian, P.; Azad, N.L. Real-Time Nonlinear Model Predictive Control of a Battery–Supercapacitor Hybrid Energy Storage System in Electric Vehicles. IEEE Trans. Veh. Technol. 2017, 66, 9678–9688. [Google Scholar] [CrossRef]
- Jan, M.U.; Xin, A.; Rehman, H.U.; Abdelbaky, M.A.; Iqbal, S.; Aurangzeb, M. Frequency Regulation of an Isolated Microgrid with Electric Vehicles and Energy Storage System Integration Using Adaptive and Model Predictive Controllers. IEEE Access 2021, 9, 14958–14970. [Google Scholar] [CrossRef]
- Yu, H.; Zhang, F.; Xi, J.; Cao, D. Mixed-Integer Optimal Design and Energy Management of Hybrid Electric Vehicles With Automated Manual Transmissions. IEEE Trans. Veh. Technol. 2020, 69, 12705–12715. [Google Scholar] [CrossRef]
- Wang, J.; Bharati, G.R.; Paudyal, S.; Ceylan, O.; Bhattarai, B.P.; Myers, K.S. Coordinated electric vehicle charging with reactive power support to distribution grids. IEEE Trans. Ind. Inform. 2018, 15, 54–63. [Google Scholar] [CrossRef]
- Iqbal, S.; Xin, A.; Jan, M.U.; ur Rehman, H.; Masood, A.; Rizvi, S.A.A.; Salman, S. Aggregated Electric Vehicle-to-Grid for Primary Frequency Control in a Microgrid—A Review. In Proceedings of the 2018 IEEE 2nd International Electrical and Energy Conference (CIEEC), Beijing, China, 4–6 November 2018; pp. 563–568. [Google Scholar] [CrossRef]
- Xiong, R.; Tian, J.; Shen, W.; Sun, F. A Novel Fractional Order Model for State of Charge Estimation in Lithium Ion Batteries. IEEE Trans. Veh. Technol. 2019, 68, 4130–4139. [Google Scholar] [CrossRef]
- Robert, F.C.; Sisodia, G.S.; Gopalan, S. A critical review on the utilization of storage and demand response for the implementation of renewable energy microgrids. Sustain. Cities Soc. 2018, 40, 735–745. [Google Scholar] [CrossRef]
- Habib, S.; Abbas, G.; Jumani, T.A.; Bhutto, A.A.; Mirsaeidi, S.; Ahmed, E.M. Improved Whale Optimization Algorithm for Transient Response, Robustness, and Stability Enhancement of an Automatic Voltage Regulator System. Energies 2022, 15, 5037. [Google Scholar] [CrossRef]
- Gazafroudi, S.; Corchado, J.M.; Keane, A.; Soroudi, A. Decentralised flexibility management for EVs. IET Renew. Power Gener. 2019, 13, 952–960. [Google Scholar] [CrossRef]
- Zhang, T.; Zhao, C.; Sun, X.; Lin, M.; Chen, Q. Uncertainty-Aware Energy Management Strategy for Hybrid Electric Vehicle Using Hybrid Deep Learning Method. IEEE Access 2022, 10, 63152–63162. [Google Scholar] [CrossRef]
- Ahmed, M.; Mohamed, E.A.; Elmelegi, A.; Aly, M.; Elbaksawi, O. Optimum Modified Fractional Order Controller for Future Electric Vehicles and Renewable Energy-Based Interconnected Power Systems. IEEE Access 2021, 9, 29993–30010. [Google Scholar] [CrossRef]
- Peng, C.; Zou, J.; Lian, L.; Li, L. An optimal dispatching strategy for V2G aggregator participating in supplementary frequency regulation considering EV driving demand and aggregator’s benefits. Appl. Energy 2017, 190, 591–599. [Google Scholar] [CrossRef]
- Chen, H.; Xiong, R.; Lin, C.; Shen, W. Model predictive control based real-time energy management for hybrid energy storage system. CSEE J. Power Energy Syst. 2021, 7, 862–874. [Google Scholar] [CrossRef]
- Crow, M.L. Electric vehicle scheduling considering co-optimized customer and system objectives. IEEE Trans. Sustain. Energy 2017, 9, 410–419. [Google Scholar]
- Habib, S.; Khan, M.M.; Abbas, F.; Tang, H. Assessment of electric vehicles concerning impacts, charging infrastructure with unidirectional and bidirectional chargers, and power flow comparisons. Int. J. Energy Res. 2018, 42, 3416–3441. [Google Scholar] [CrossRef]
- Habib, S. Contemporary trends in power electronics converters for charging solutions of electric vehicles. CSEE J. Power Energy Syst. 2020, 6, 911–929. [Google Scholar] [CrossRef]
- Hou, J.; Zeng, H.; Zhu, J.; Hou, J.; Chen, J.; Ma, K.-K. Deep Quadruplet Appearance Learning for Vehicle Re-Identification. IEEE Trans. Veh. Technol. 2019, 68, 8512–8522. [Google Scholar] [CrossRef]
- Dong, C.; Sun, J.; Wu, F.; Jia, H. Probability-Based Energy Reinforced Management of Electric Vehicle Aggregation in the Electrical Grid Frequency Regulation. IEEE Access 2020, 8, 110598–110610. [Google Scholar] [CrossRef]
- Iqbal, S.; Xin, A.; Jan, M.U.; Abdelbaky, M.A.; Rehman, H.U.; Salman, S.; Aurangzeb, M.; Rizvi, S.A.A.; Auragzeb, N.M.; Shah, N.A. Improvement of Power Converters Performance by an Efficient Use of Dead Time Compensation Technique. Appl. Sci. 2020, 10, 3121. [Google Scholar] [CrossRef]
- Lei, Z.; Sun, D.; Liu, J.; Chen, D.; Liu, Y.; Chen, Z. Trip-Oriented Model Predictive Energy Management Strategy for Plug-in Hybrid Electric Vehicles. IEEE Access 2019, 7, 113771–113785. [Google Scholar] [CrossRef]
- Iqbal, S.; Xin, A.; Masood, A.; Jan, M.U.; ur Rehman, H.; Masood, A.; Rizvi, S.A.A.; Salman, S. Impact of Charging Station Operator (CSO) on V2G Method for Primary Frequency Control (PFC) in an Industrial Microgrid. In Proceedings of the 2019 IEEE 3rd Conference on Energy Internet and Energy System Integration (EI2), Changsha, China, 8–10 November 2019; pp. 100–105. [Google Scholar]
- Liu, H.; Yang, Y.; Qi, J.; Li, J.; Wei, H.; Li, P. Frequency droop control with scheduled charging of electric vehicles. IET Gener. Transm. Distrib. 2017, 11, 649–656. [Google Scholar] [CrossRef]
- Alam, M. Day-Ahead Electricity Price Forecasting and Scheduling of Energy Storage in LMP Market. IEEE Access 2019, 7, 165627–165634. [Google Scholar] [CrossRef]
- Khooban, M.H.; Gheisarnejad, M. A Novel Deep Reinforcement Learning Controller Based Type-II Fuzzy System: Frequency Regulation in Microgrids. IEEE Trans. Emerg. Top. Comput. Intell. 2020, 5, 689–699. [Google Scholar] [CrossRef]
- Zhao, M.; Zhang, R.; Lin, C.; Zhou, H.; Shi, J. Stochastic Model Predictive Control for Dual-Motor Battery Electric Bus Based on Signed Markov Chain Monte Carlo Method. IEEE Access 2020, 8, 120785–120797. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Features | Specifications |
|---|---|
| Battery | Lithium-ion Battery |
| Capacity of EV batter | 72 Volt (100Ah) |
| Battery nominal voltage | 72 Volt |
| Nominal capacity of battery | 112 Ah |
| Distinctive capacity of EV battery | 116 Ah |
| Accomplished charging voltage | 85.5 Volt + 0.05 Volt |
| Accomplished discharging voltage | 65.5 Volt |
| Battery charging time of EV | 4.5 h (0.33C) |
| Method of EV battery charge | Standard (85.5 Volt and CV at 0.333 C.A) |
| Fast EV charging method | (85.5 Volt and CV at 1.0 C.A) |
| Maximum discharging current | 240 amperes |
| Scenario | Forecast Value | Skewness | Kurtosis | Variance | ||||
|---|---|---|---|---|---|---|---|---|
| M.L.E | MCSMC | M.L.E | MCS.MC | M.L.E | MCSMC | M.L.E | MCS.MC | |
| i | 12.08 | 7.50 | 2.6 | 1.60 | 8.40 | 2.88 | 91.12 | 73.90 |
| ii | 25.10 | 20.87 | 1.54 | 0.53 | 1.32 | 0.80 | 230.08 | 143.88 |
| iii | 9.96 | 5.25 | 3.78 | 1.74 | 16.50 | 2.92 | 131.35 | 51.00 |
| iv | 24.82 | 15.10 | 1.76 | 0.52 | 2.00 | 0.50 | 195.98 | 188.96 |
| v | 19.06 | 13.52 | 1.94 | 0.90 | 3.05 | 0.15 | 224.98 | 148.05 |
| Parametric Symbols | Existing Charging Strategy | Proposed Charging Strategy |
|---|---|---|
| Load | 5358.30 | 5354.45 |
| Peak Load | 308.32 | 302.18 |
| Saving | 0.152 | 0.642 |
| Average Load | 54.18 | 54.95 |
| Daily Trip | 0.985 | 0.982 |
| CI | 0.533 | 0.645 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iqbal, S.; Habib, S.; Ali, M.; Shafiq, A.; ur Rehman, A.; Ahmed, E.M.; Khurshaid, T.; Kamel, S. The Impact of V2G Charging/Discharging Strategy on the Microgrid Environment Considering Stochastic Methods. Sustainability 2022, 14, 13211. https://doi.org/10.3390/su142013211
Iqbal S, Habib S, Ali M, Shafiq A, ur Rehman A, Ahmed EM, Khurshaid T, Kamel S. The Impact of V2G Charging/Discharging Strategy on the Microgrid Environment Considering Stochastic Methods. Sustainability. 2022; 14(20):13211. https://doi.org/10.3390/su142013211
Chicago/Turabian StyleIqbal, Sheeraz, Salman Habib, Muhammad Ali, Aqib Shafiq, Anis ur Rehman, Emad M. Ahmed, Tahir Khurshaid, and Salah Kamel. 2022. "The Impact of V2G Charging/Discharging Strategy on the Microgrid Environment Considering Stochastic Methods" Sustainability 14, no. 20: 13211. https://doi.org/10.3390/su142013211