
An Improved Social Force Model of Pedestrian Twice–Crossing Based on Spatial–Temporal Trajectory Characteristics


Abstract
:1. Introduction
2. Research Method
2.1. Descriptions of Pedestrian Twice-Crossing
2.2. Social Force Model and Improvement
2.2.1. Classical Social Force Model
2.2.2. Improved Social Force Model
2.2.3. Self-Driving Force
2.2.4. Attraction and Repulsion Generated by Other Pedestrians
2.2.5. Influence of Green Signal Countdown
2.3. Principle of Impulse and Momentum
2.4. Principle of Work and Energy
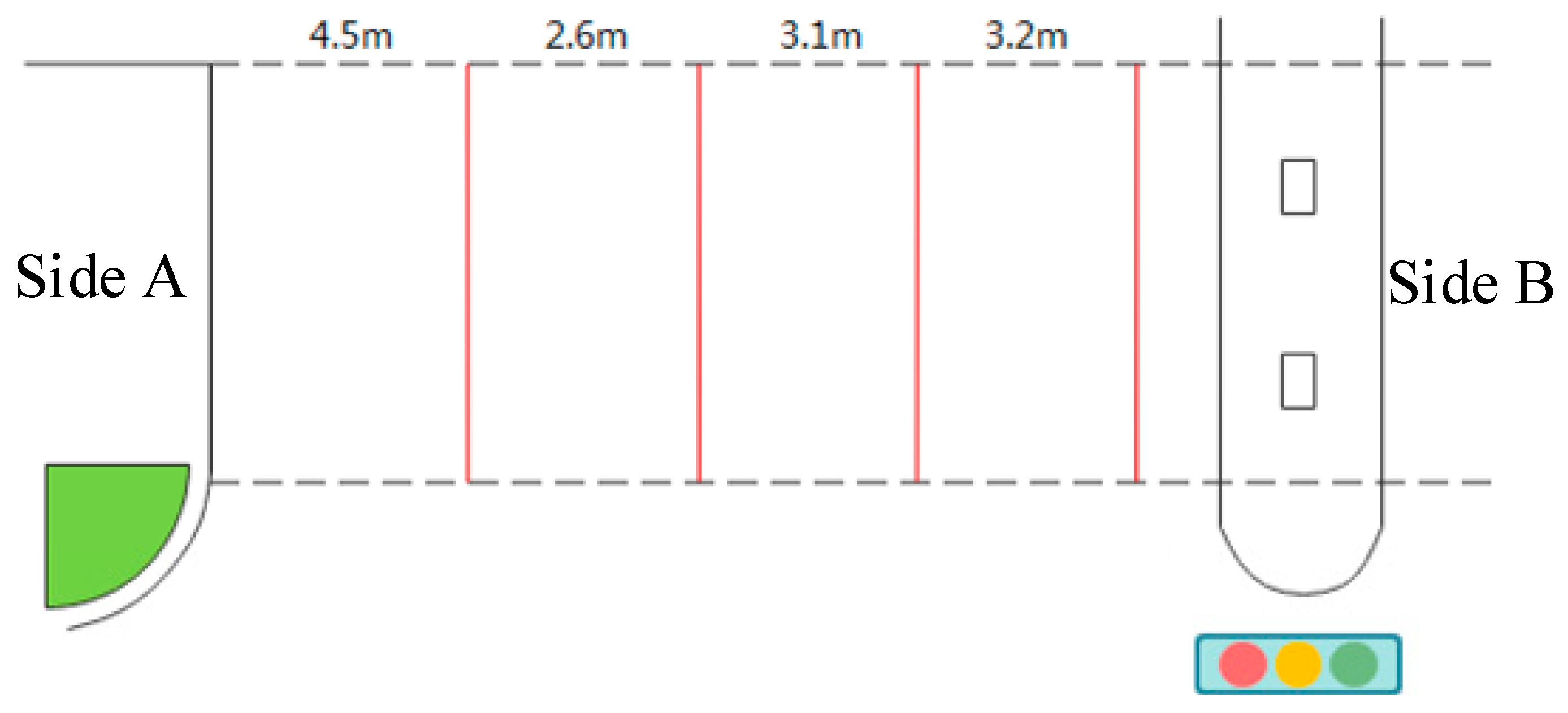
3. Data Collection and Processing
- (1)
- On cross section S1, pedestrians in the first row of direction A arrive here when pedestrians in the first row of direction B have just passed the boundary of the refuge island. Most pedestrians in both directions face straight forward and maintain a relatively consistent orientation.
- (2)
- On cross section S2, pedestrians on both sides begin their bidirectional aggregation. From this location, pedestrians on side A begin to decrease their speeds and increase their changes in walking direction, chiefly owing to the effects of pedestrians on side B.
- (3)
- On cross section S3, both sides are engaged in the longest interaction. At this location, pedestrians on side A tend to change their directions, extending over the widest range of angles. From here, pedestrians start increasing their crossing speeds with the increased influence of the green signal countdown.
- (4)
- On cross section S4, both sides completely split up following in the aggregation. Pedestrians on side A gradually go back to the previous state, that is, they face directly forward.
4. Analysis and Results
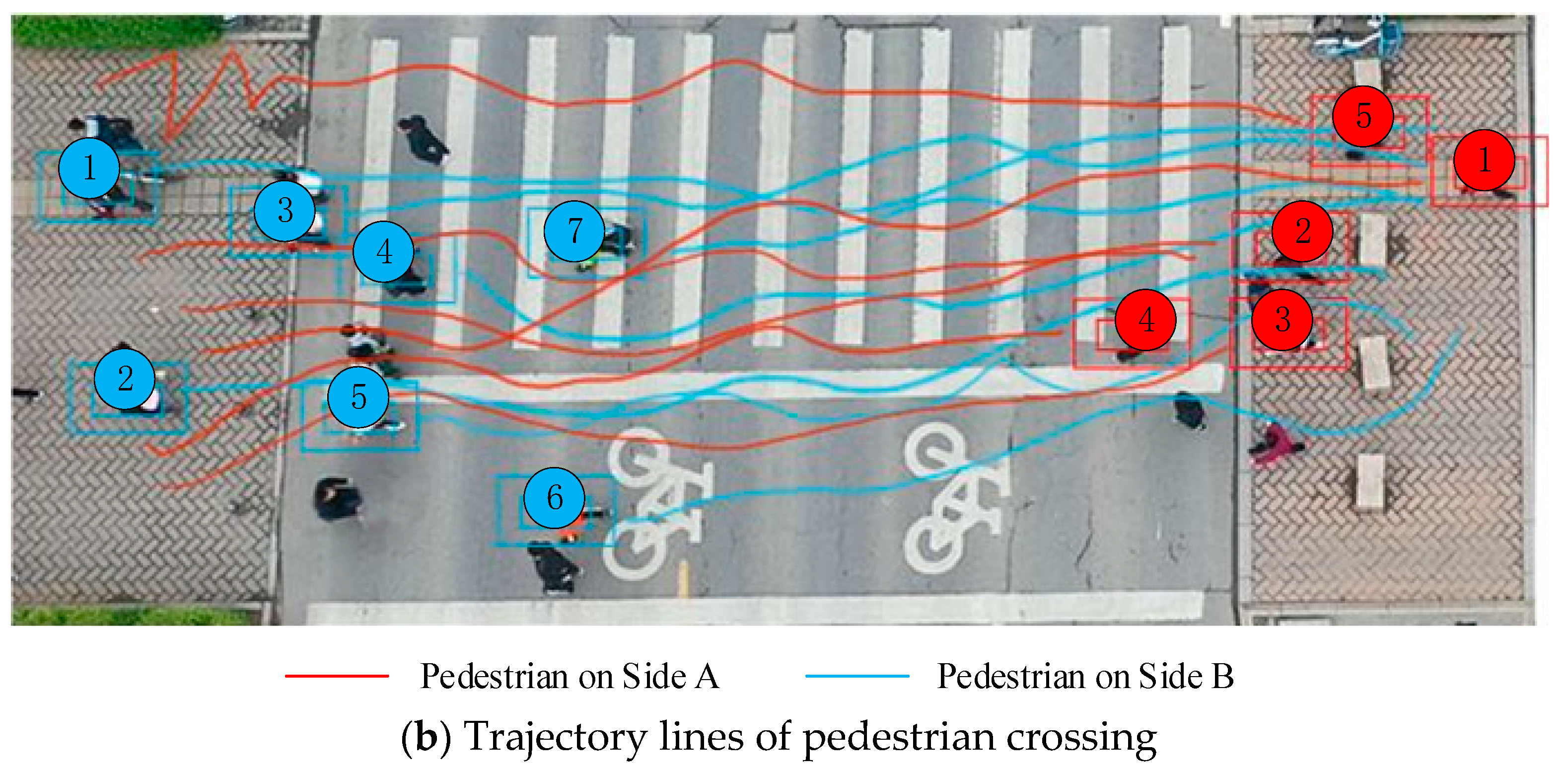
4.1. Trajectory Analysis
- In the pre-aggregation process, pedestrians have a strong tendency to face directly forward and maintain acceleration.
- In the interactive aggregation process, pedestrians are more likely to frequently change their walking directions with the purpose of finding space to weave in and get out of the congested situation. It reflects that pedestrians’ crossing strategy over the aggregation is to “spend a shorter time through extending the path length”. Moreover, pedestrians have to slow down under the impact of pedestrians approaching from the opposite direction. This indicates that the repulsion generated by the counterstream presents the growing impact on pedestrian walking behavior during the aggregation process. We will explore the impact below by classifying the type of movement trajectory.
- In the post-aggregation process, pedestrians have a high inclination to return to the state of facing straight ahead and speeding up at a high rate.
4.2. Spatial-Temporal Analysis of Pedestrian Movement
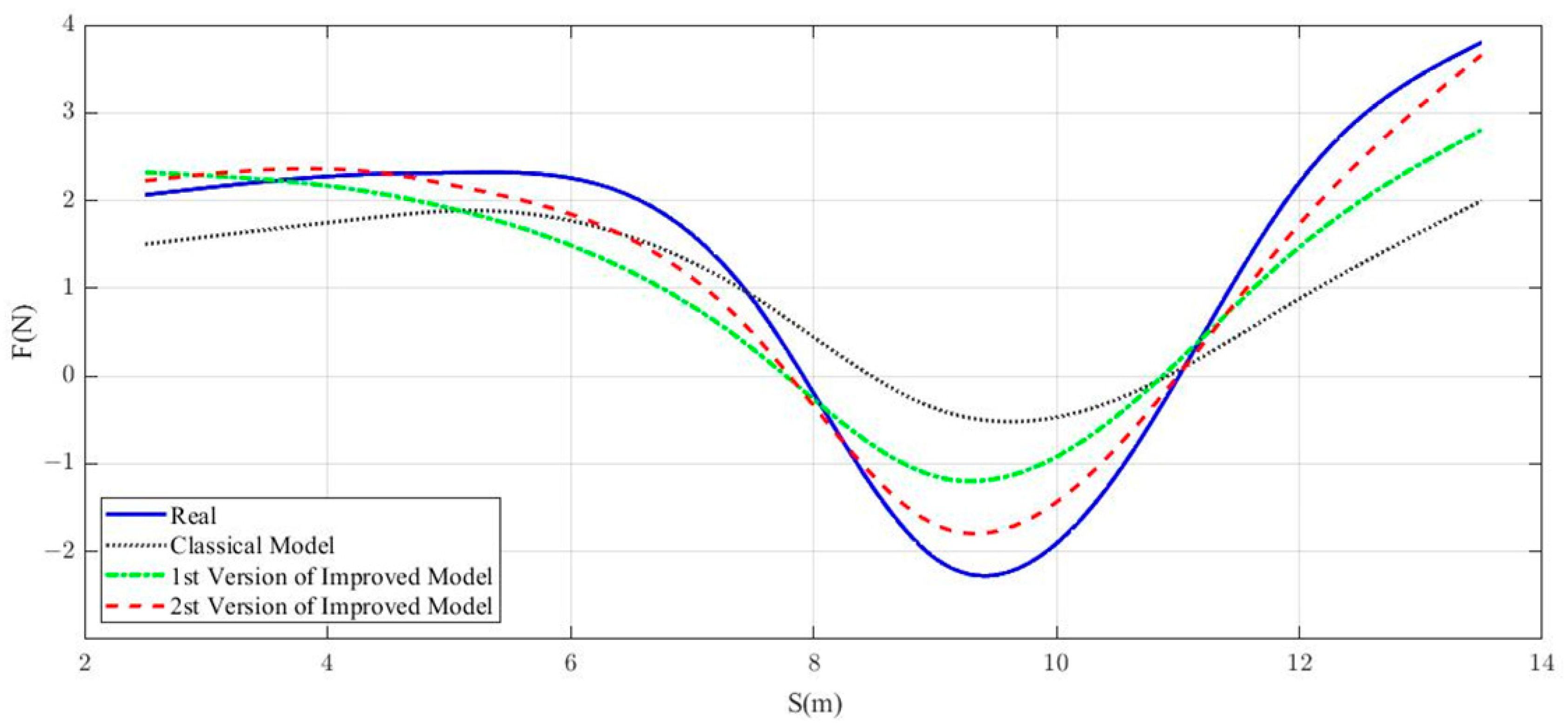
4.3. Improvements of Social Force Model
5. Conclusions
- (1)
- The straight path (−2.8 N) has a larger magnitude of maximum negative force than the curved one (−1.2 N) during congested interactions. In the dissipation stage, the two path types present no obvious difference in the net force exerted on pedestrians.
- (2)
- In terms of temporal distribution, the maximum negative force of the straight path tends to remain for a period of time (about 2 s).
- (3)
- Compared to the original model and the 1st version of the improved model, the 2nd version of the improved model can achieve a higher accuracy in estimating the forces exerted on pedestrians during twice-crossing, especially in the aggregation stage.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pan, H.; Chen, P.; Ma, J. Pedestrians′ Group Psychology about Violating Traffic Laws to Cross Road at Signalized Crossing. Transp. Eng. Saf. 2010, 23, 150–156. [Google Scholar]
- Huang, L.Q. Study on Optimization of Pedestrian Signal for Two-stage Crossing with Minimum Delay. Master’s Thesis, Southeast University, Nanjing, China, 2019. [Google Scholar]
- Zhao, L.; Ren, G.F.; Gao, Z.W.; Hao, J.M.; Zhai, W.J.; Yuan, X.R. Research on Signal Control Downlink Pedestrian Crossing the Street Twice Based on VISSIM Simulation. Comput. Prod. Circ. 2019, 9, 104–105. [Google Scholar]
- Cong, R.; Li, Y.; Li, K.; Hou, C. Game dynamics of sentiment contagion in pedestrian crossing. Results Control Optim. 2022, 8, 100159. [Google Scholar] [CrossRef]
- Zhou, F. Research on Pedestrian’s Second Crossing Behavior Based on Game Theory. J. Luoyang Inst. Sci. Technol. 2018, 28, 21–24. [Google Scholar]
- Song, C.; Kim, I.; Xiang, Q. Evaluation of Large Signalized Intersection with New Pedestrians Twice Crossing. Procedia Comput. Sci. 2017, 109, 132–139. [Google Scholar] [CrossRef]
- King, M.R.; Carnegie, J.A.; Ewing, R. Pedestrian Safety Through a Raised Median and Redesigned Intersections. Transp. Res. Rec. 2003, 1828, 56–66. [Google Scholar] [CrossRef]
- Yang, R. The Study of Pedestrian Delay Based on Setting Method of Pedestrian Twice Crossing at Signalized Intersection. Master’s Thesis, Southwest Jiaotong University, Chengdu, China, 2017. [Google Scholar]
- Wang, Y.L.; Lu, J.T.; Wu, B. Multi-objective Optimization of Signal Phase Sequence at Isolated Intersections with Pedestrian Two-stage Crossing. Res. Explor. Lab. 2019, 38, 27–32. [Google Scholar]
- Li, C. Pedestrians’ Second-Passage Traffic Organization Method and Case Study. Master’s Thesis, Southwest Jiaotong University, Chengdu, China, 2011. [Google Scholar]
- Li, J.; Liu, A.Y. Research on pedestrian crossing behavior based on improved social force model. J. Transp. Eng. Inf. 2017, 15, 6–13. [Google Scholar]
- Cao, Y.; Ni, Y.; Li, K. Simulating pedestrian signal violation at signalized intersections with pedestrian two-stage crossing. Transportation Research Board. In Proceedings of the 96th Annual Meeting, Washington, DC, USA, 8–12 January 2017. [Google Scholar]
- Helbing, D.; Molnár, P. Social force model for pedestrian dynamics. Phys. Rev. E 1995, 51, 4282. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jiang, Y.; Chen, B.; Li, X.; Ding, Z. Dynamic navigation field in the social force model for pedestrian evacuation. Appl. Math. Model. 2020, 80, 815–826. [Google Scholar] [CrossRef]
- Kang, Z.; Zhang, L.; Li, K. An improved social force model for pedestrian dynamics in shipwrecks. Appl. Math. Comput. 2019, 348, 355–362. [Google Scholar] [CrossRef]
- Zhou, R.; Cui, Y.; Wang, Y.; Jiang, J. A modified social force model with different categories of pedestrians for subway station evacuation. Tunn. Undergr. Space Technol. 2021, 110, 103837. [Google Scholar] [CrossRef]
- Zeng, W.; Nakamura, H.; Chen, P. A Modified Social Force Model for Pedestrian Behavior Simulation at Signalized Crosswalks. Procedia -Soc. Behav. Sci. 2014, 138, 521–530. [Google Scholar] [CrossRef] [Green Version]
- Guo, Y.; Ma, S.; Wei, F.; Lu, L.; Sun, F.; Wang, J. Analysis of Behavior Characteristics for Pedestrian Twice-Crossing at Signalized Intersections Based on an Improved Social Force Model. Sustainability 2022, 14, 2003. [Google Scholar] [CrossRef]
- Liu, B.; Liu, H.; Zhang, H.; Qin, X. A social force evacuation model driven by video data. Simul. Model. Pract. Theory 2018, 84, 190–203. [Google Scholar] [CrossRef]
- Yang, X.; Yang, X.; Li, Y.; Zhang, J.; Kang, Y. Obstacle avoidance in the improved social force model based on ant colony optimization during pedestrian evacuation. Phys. A Stat. Mech. Its Appl. 2021, 583, 126256. [Google Scholar] [CrossRef]
- Tao, J.N. The Momentum Theorem and the Momentum of Money: A Philosophical Reflection on the Velocity of Money. SSRN Electron. J. 2002. [Google Scholar] [CrossRef]
- Corbetta, A.; Muntean, A.; Vafayi, K. Parameter estimation of social forces in pedestrian dynamics models via a probabilistic method. Math. Biosci. Eng. 2015, 12, 337–356. [Google Scholar] [CrossRef] [PubMed]
- Wang, P. Understanding Social-Force Model in Psychological Principles of Collective Behavior. arXiv 2016, arXiv:1605.05146. [Google Scholar]
- Qin, P.; Zhao, Z.J. Intersection Safety Evaluation Model Based on Dynamic Energy Conversion Principle. Urban Transp. ChinaV 2019, 17, 102–113. [Google Scholar]
- Li, Q.; Shang, S.; Pei, X.; Wang, Q.; Zhou, Q.; Nie, B. Kinetic and Kinematic Features of Pedestrian Avoidance Behavior in Motor Vehicle Conflicts. Front. Bioeng. Biotechnol. 2021, 9, 783003. [Google Scholar] [CrossRef] [PubMed]
- Liang, H.; Du, J.; Wong, S. A Continuum model for pedestrian flow with explicit consideration of crowd force and panic effects. Transp. Res. Part B Methodol. 2021, 149, 100–117. [Google Scholar] [CrossRef]
- Wei, J.; Fan, W.; Guo, Y.; Hu, J.; Fang, Y. An extended social force model for pedestrian evacuation under disturbance fluctuation force. Int. J. Mod. Phys. C 2020, 31, 7. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Starting Time | Side A | |||||
|---|---|---|---|---|---|---|
| S1 | S2 | S3 | S4 | AVG. | ||
| First | 31/35/…/51 | 36/43/…/56 | 40/48/…/01 | 42/52/…/07 | 44/53/…/09 | 13 |
| Middle | 32/54/…/31 | 37/59/…/36 | 40/02/…/40 | 43/06/…/42 | 46/09/…/47 | 14 |
| Last | 35/27/…/43 | 41/33/…/50 | 42/35/…/51 | 43/36/…/32 | 45/39/…/34 | 12 |
| Starting Time | Side B | |||||
| S4 | S3 | S2 | S1 | AVG. | ||
| First | 31/43/…/23 | 34/46/…/36 | 40/52/…41 | 42/53/…/43 | 45/56/…/46 | 14 |
| Middle | 12/30/…/11 | 17/35/…/16 | 20/38/…/19 | 24/42/…/21 | 27/45/…/26 | 18 |
| Last | 12/43/…/55 | 18/47/…/01 | 21/50/…/05 | 25/54/…/09 | 27/56/…/12 | 19 |
| Straight Path | Curved Path | Relationship | ||
|---|---|---|---|---|
| Velocity | Begin | |||
| End | ||||
| Time | > | |||
| Distance | ||||
| Equation | Classic Model | 1st Version of Improved Model | 2st Version of Improved Model |
|---|---|---|---|
| Full | |||
| Self-driving Force | |||
| Force from surrounding pedestrians | |||
| Force from crosswalk boundary | |||
| Force from Green signal Countdown | ~ | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, S.; Guo, Y.; Wei, F.; Li, Q.; Wang, Z. An Improved Social Force Model of Pedestrian Twice–Crossing Based on Spatial–Temporal Trajectory Characteristics. Sustainability 2022, 14, 16615. https://doi.org/10.3390/su142416615
Ma S, Guo Y, Wei F, Li Q, Wang Z. An Improved Social Force Model of Pedestrian Twice–Crossing Based on Spatial–Temporal Trajectory Characteristics. Sustainability. 2022; 14(24):16615. https://doi.org/10.3390/su142416615
Chicago/Turabian StyleMa, Siyuan, Yongqing Guo, Fulu Wei, Qingyin Li, and Zhenyu Wang. 2022. "An Improved Social Force Model of Pedestrian Twice–Crossing Based on Spatial–Temporal Trajectory Characteristics" Sustainability 14, no. 24: 16615. https://doi.org/10.3390/su142416615