
Shared Parking Decision Behavior of Parking Space Owners and Car Travelers Based on Prospect Theory—A Case Study of Nanchang City, China

 ,
,
Abstract
:1. Introduction
2. Research Methodology
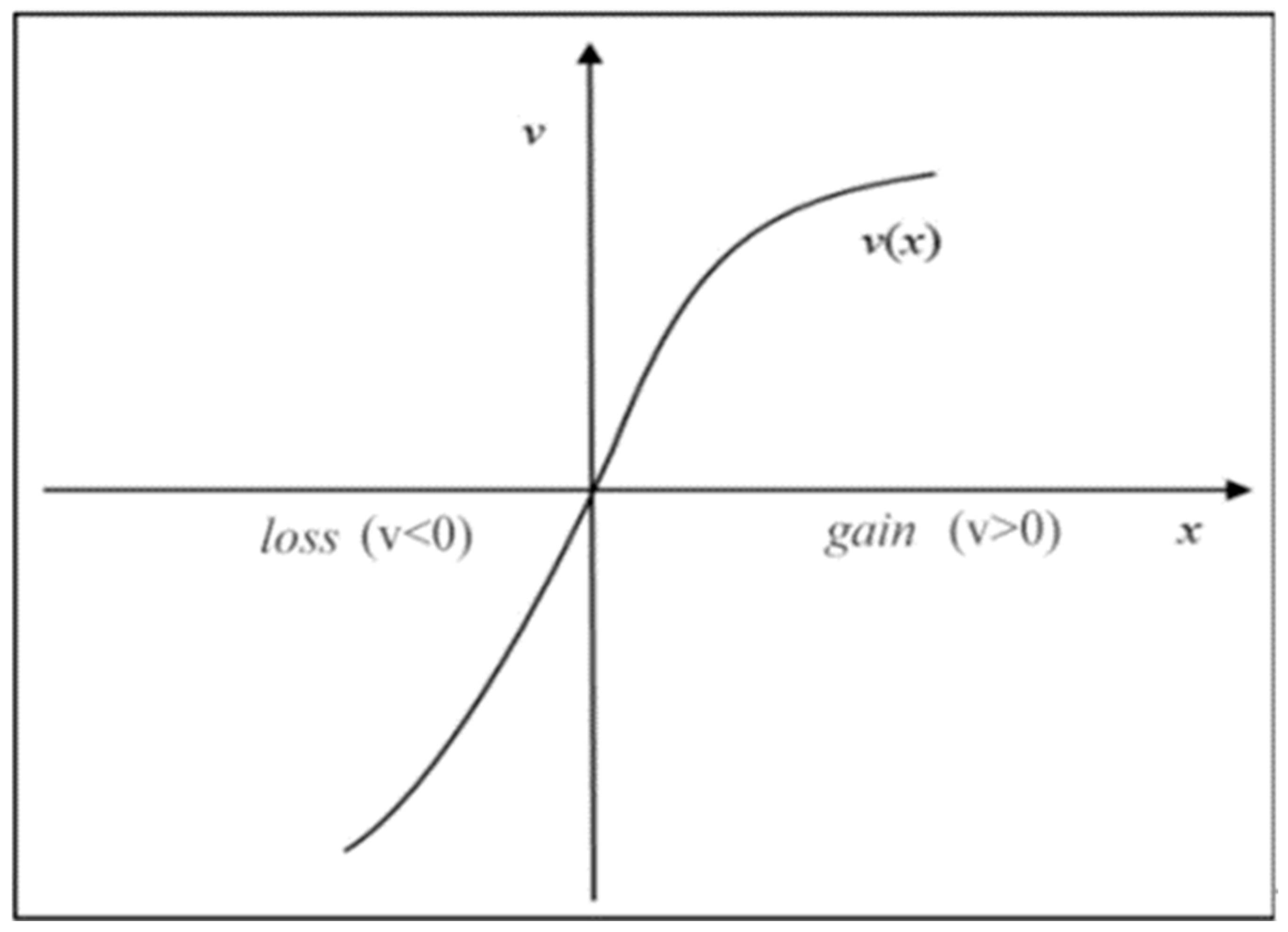
2.1. Prospect Theory
2.1.1. Characteristics of Prospect Theory
- People are more sensitive to losses than gains.
- People tend to avoid risk when faced with gains, and tend to pursue risk in the face of losses.
- People attach importance not only to the absolute amount of wealth but also to the amount of change in wealth.
- The decision makers in the early stage will have a certain influence on the later stage. If people gain in the first period, people’s preference for risk will be enhanced; if people face loss in the first period, people’s aversion to risk will increase.
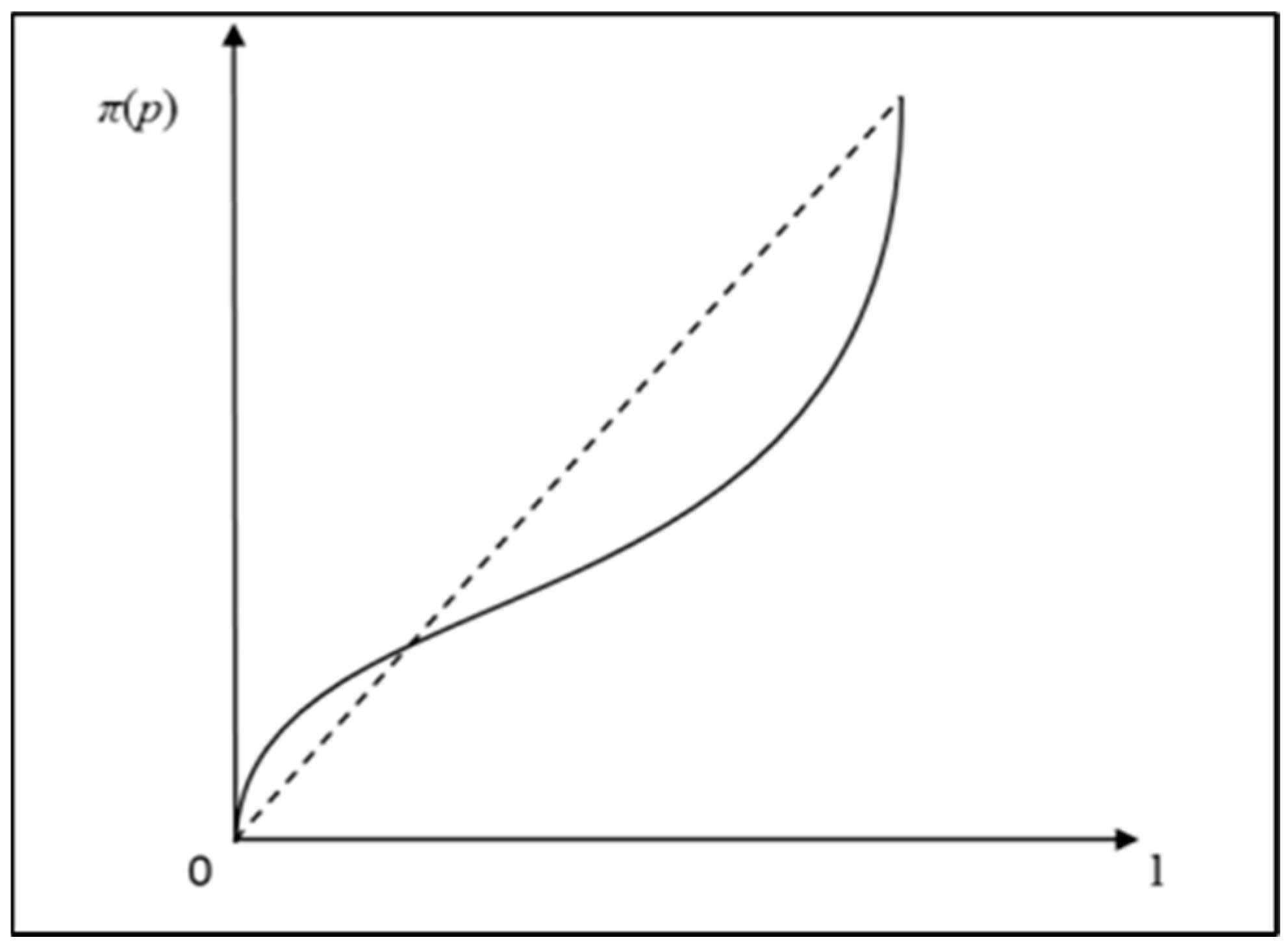
2.1.2. Prospect Theory Model
2.2. Shared Parking Decision Behavior Model
2.2.1. Analysis of the Decision Behavior of Parking Space Owners
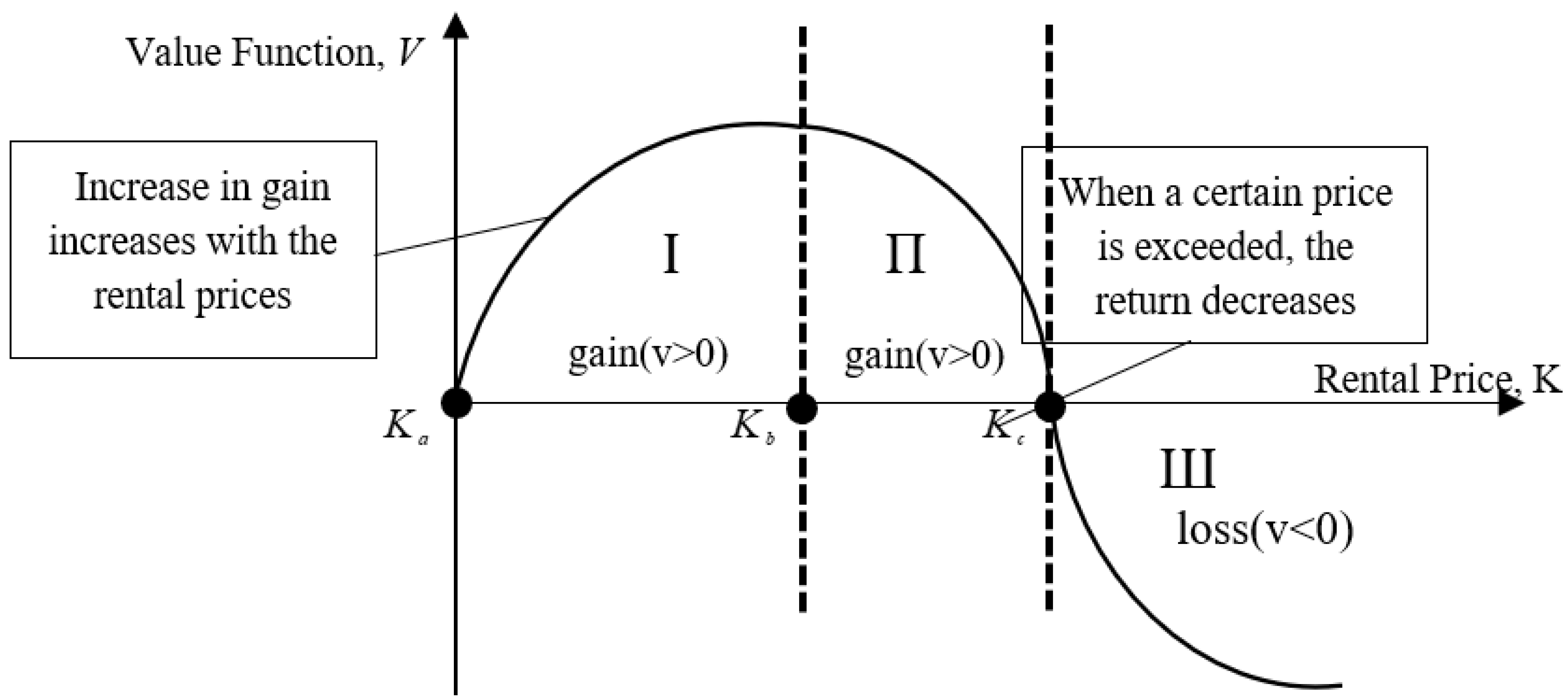
2.2.2. Rental Price Reference Point
2.2.3. Shared Parking Model of the Rental Price Based on Prospect Theory
3. Affecting Factors of Shared Parking Decision Behavior
3.1. Factors Influencing Travelers’ Decisions
3.1.1. Individual Attributes
3.1.2. Cost of Shared Parking Spaces
3.1.3. Parking Environment
3.1.4. Road Environment
3.2. Factors Influencing Parking Space Owners’ Decisions
3.2.1. Individual Attributes
3.2.2. Rental Prices
3.2.3. Parking Space Management Level
3.2.4. The Quality of Travelers
3.2.5. Number of Parking Spaces for Rent
4. Data Processing and Analysis
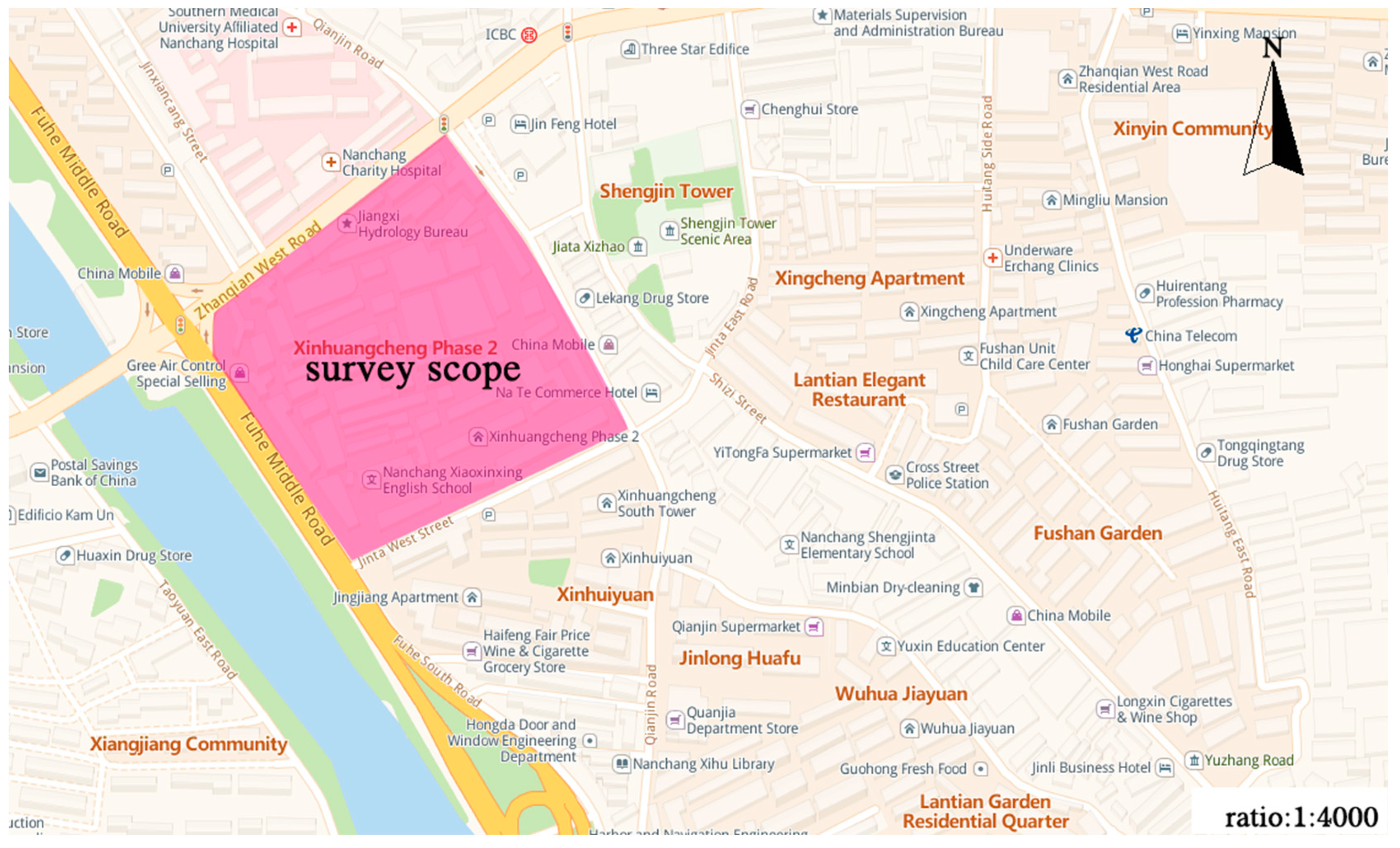
4.1. Survey Design
4.2. Data Analysis
4.2.1. Personal Characteristics Analysis
4.2.2. Analysis of External Factors
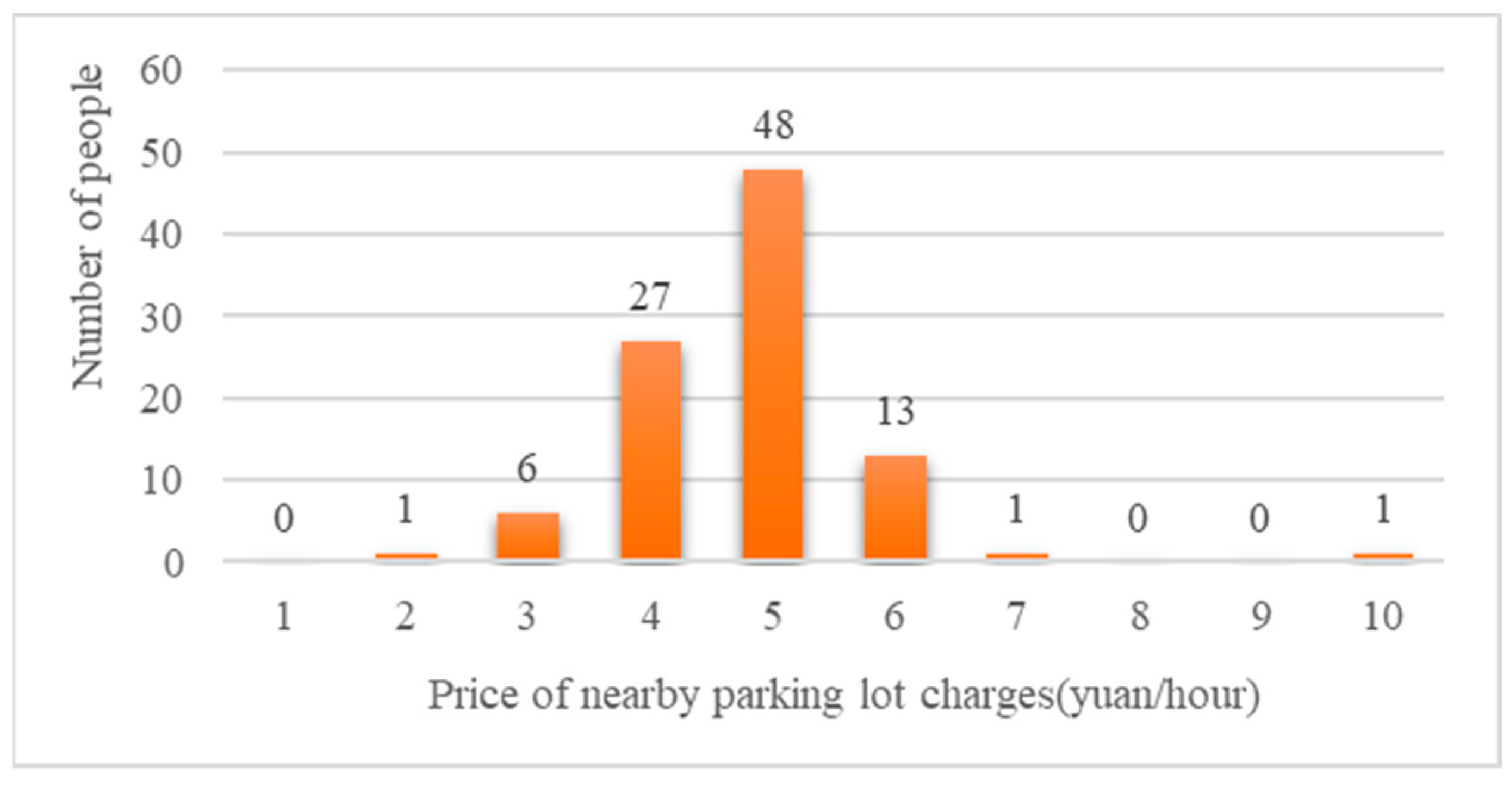
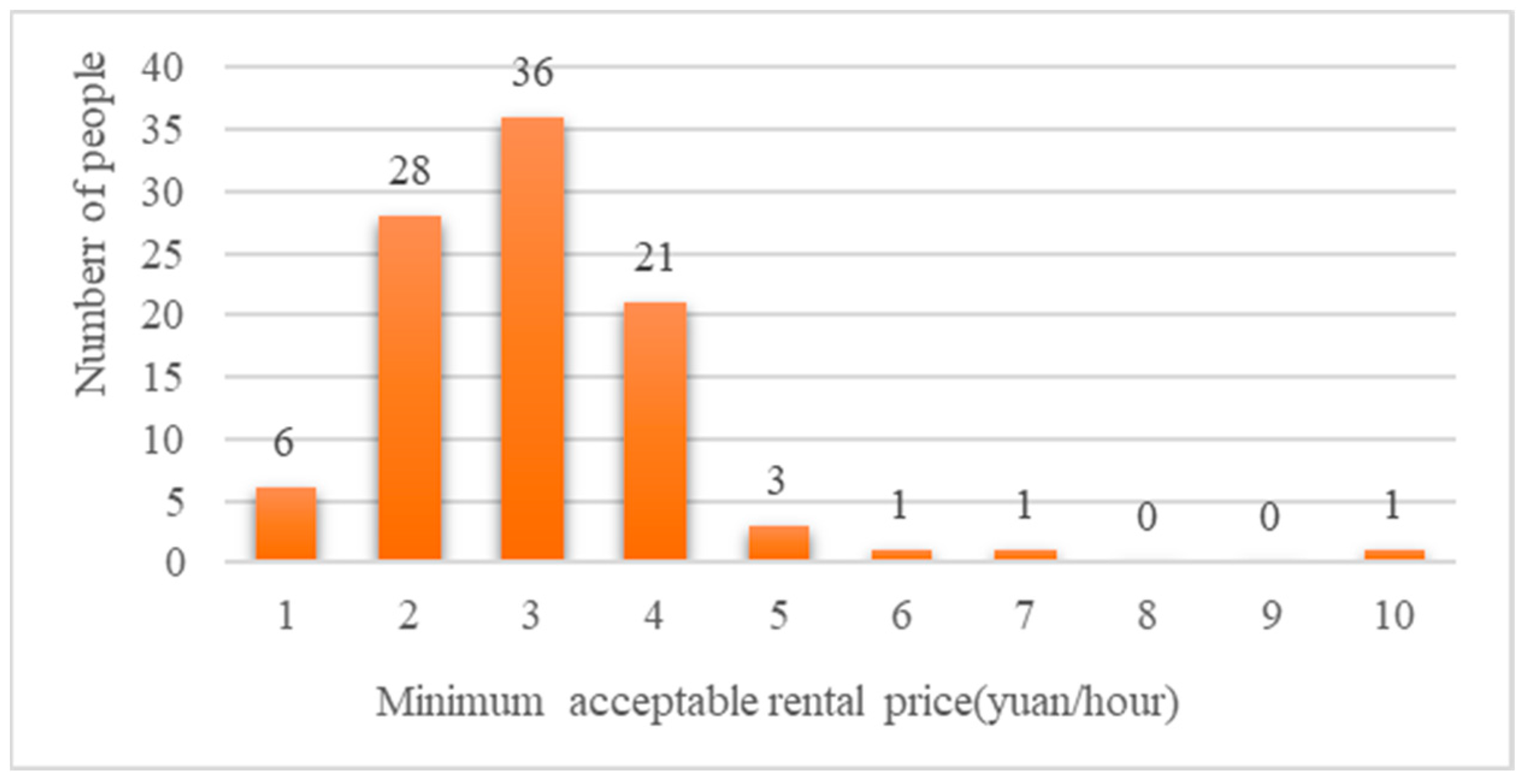
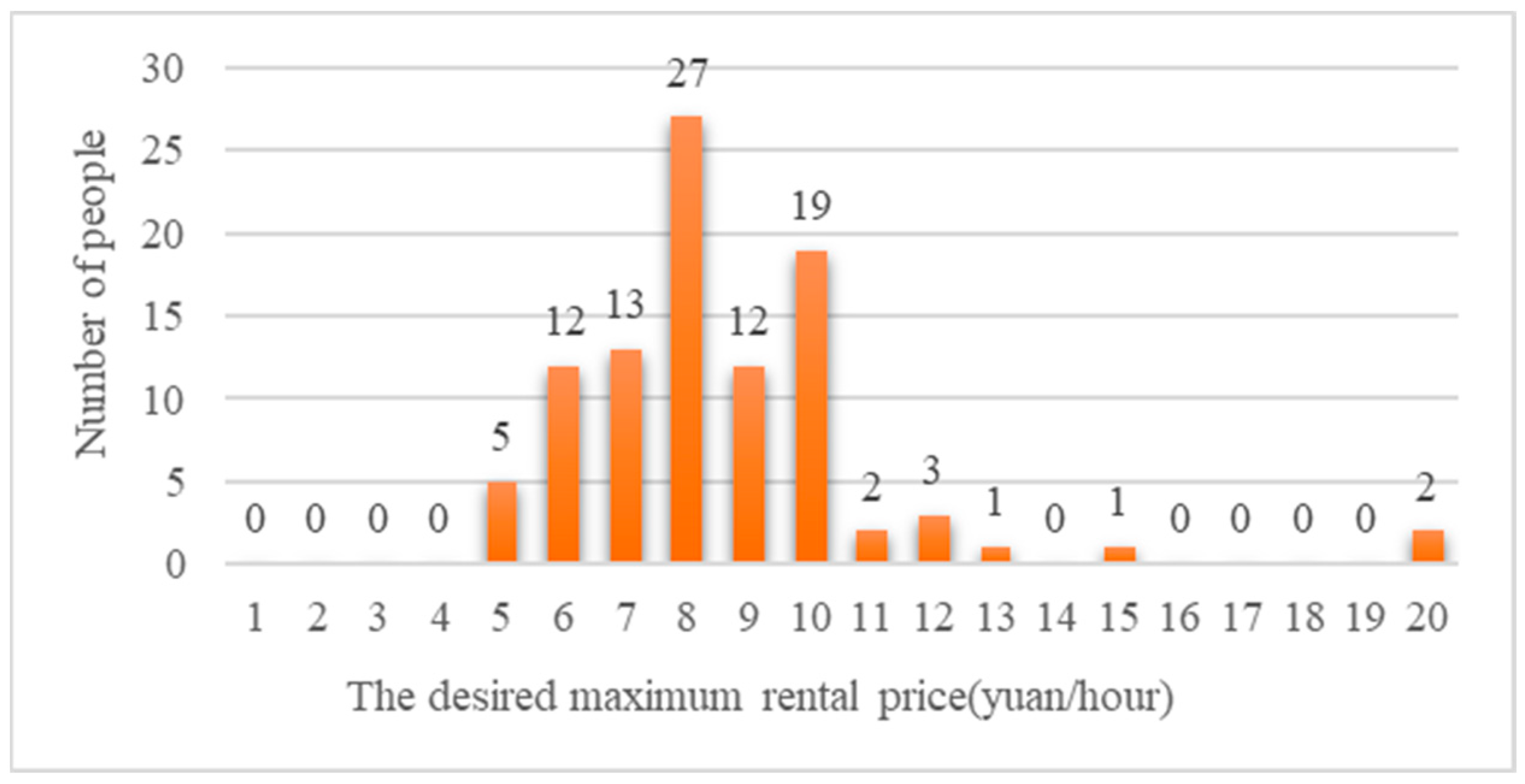
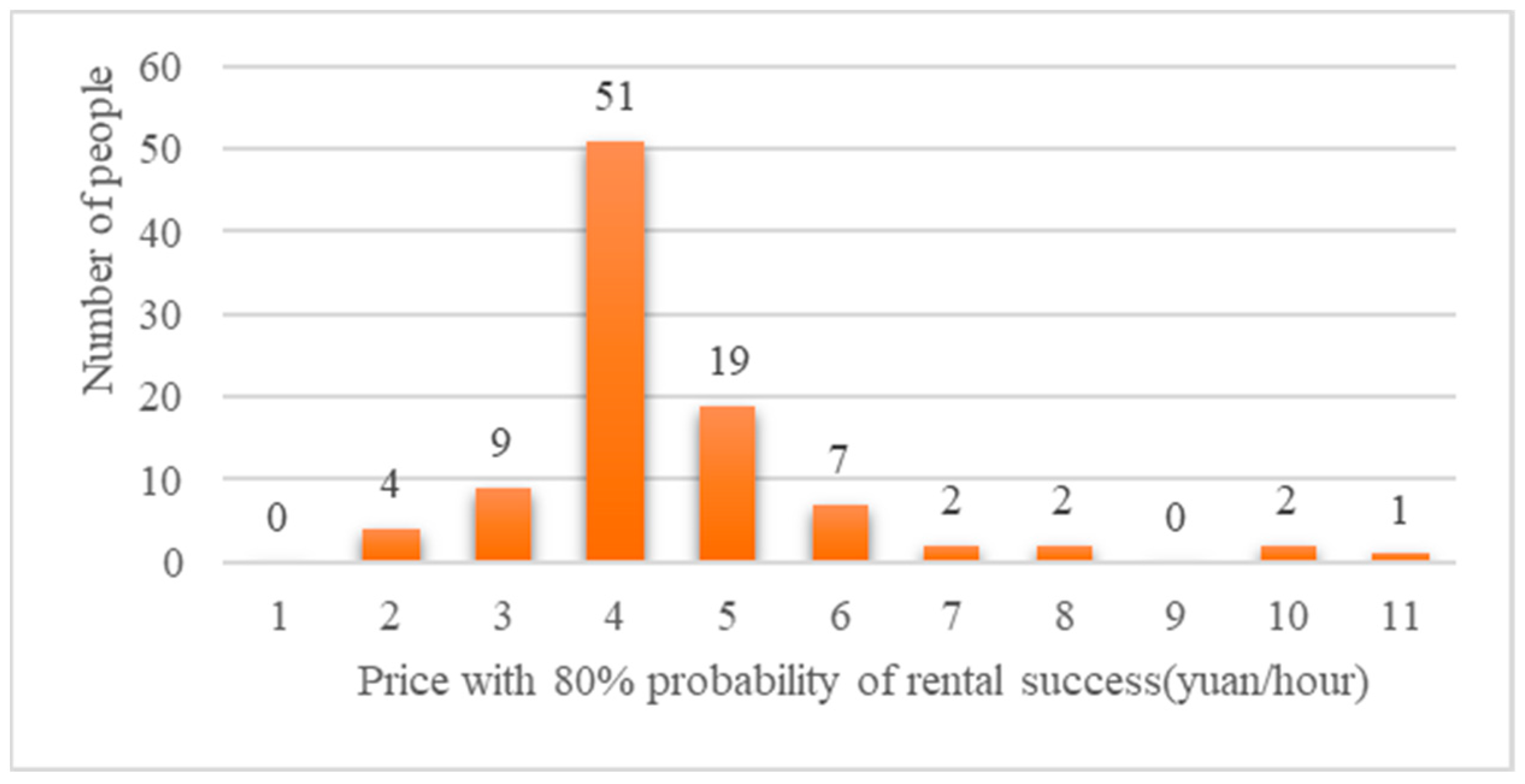
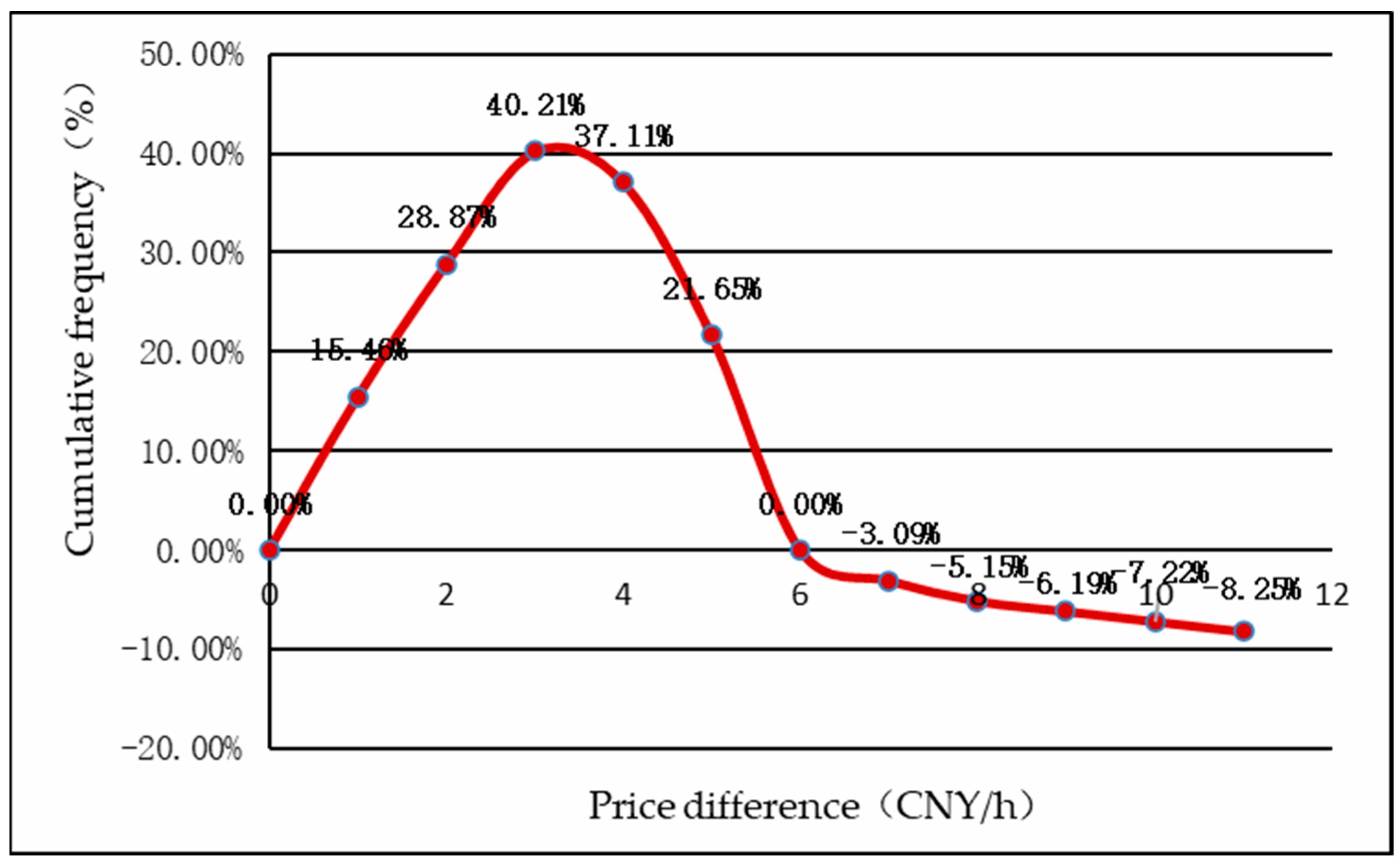
4.2.3. Rental Price Analysis
5. Model Calibration and Discussion
5.1. Value Function Analysis
5.2. Parameter Calibration of Value Function Model
6. Conclusions and Recommendations
Supplementary Materials
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- You, L.; Sun, B.; Yang, X. Thoughts on Solving the Problem of “Parking Difficulty”. Transp. Enterp. Manag. 2020, 35, 35–37. [Google Scholar] [CrossRef]
- Mao, R. Urban old city based on the spatial coordination of the country parking optimization strategy research. Transp. World 2022, 20, 1–3. [Google Scholar] [CrossRef]
- Jin, Z. Research Status and Development Trend of Mechanical Stereo Garage. Intern. Combust. Engine Parts 2021, 17, 167–168. [Google Scholar] [CrossRef]
- Wang, Y.; Du, P.; Zhao, Y.; Mao, Q.; Ji, W. Intelligent three-dimensional parking garage in enhancing the parking efficiency of the solution measures. Sci. Technol. Innov. 2021, 27, 193–194. [Google Scholar]
- Guzman, L.A.; Hessel, P. The effects of public transport subsidies for lower-income users on public transport use: A quasi-experimental study. Transp. Policy 2022, 126, 215–224. [Google Scholar] [CrossRef]
- Liu, D.; Kwan, M.; Kan, Z.; Song, Y. An integrated analysis of housing and transit affordability in the Chicago metropolitan area. Geogr. J. 2021, 187, 110–126. [Google Scholar] [CrossRef]
- Dewita, Y.; Burke, M.; Yen, B.T. The relationship between transport, housing and urban form: Affordability of transport and housing in Indonesia. Case Stud. Transp. Policy 2020, 8, 252–262. [Google Scholar] [CrossRef]
- Ai, Y.; Zeng, C.; Zhang, B. Analysis on the construction of peripheral parking and ride along Nanchang rail transit line. J. East China Jiao Tong Univ. 2018, 35, 60–67. [Google Scholar] [CrossRef]
- Ma, C.; Hao, W.; Shen, J.; Wang, C.; Du, B. Review on customized bus route optimization. J. Traffic Transp. Eng. 2021, 21, 30–41. [Google Scholar] [CrossRef]
- Xue, Y.; Li, W.; Zhang, D. Research on the Contribution of Public Transportation to Urban Social Development: Taking Nanchang City as an Example. Value Eng. 2020, 39, 28–30. [Google Scholar]
- Li, X.; Du, M.; Zhang, Y.; Yang, J. Identifying the factors influencing the choice of different ride-hailing services in Shenzhen, China. Travel Behav. Soc. 2022, 29, 53–64. [Google Scholar] [CrossRef]
- Du, M.; Cheng, L.; Li, X.; Liu, Q.; Yang, J. Spatial variation of ridesplitting adoption rate in Chicago. Transp. Res. Part A Policy Pract. 2022, 164, 13–37. [Google Scholar] [CrossRef]
- Shoup, D.C. Cruising for parking. Transp. Policy 2006, 13, 479–486. [Google Scholar] [CrossRef]
- Inaba, K.; Shibui, M.; Naganawa, T.; Ogiwara, M.; Yoshikai, N. Intelligent parking reservation service on the Internet. In Proceedings of the 2001 Symposium on Applications and the Internet Workshops, San Diego, CA, USA, 8–12 January 2001. [Google Scholar] [CrossRef]
- Xue, Y.; Cheng, L.; Lin, P.; An, J.; Guan, H. Parking Space Reservation Behavior of Car Travelers from the Perspective of Bounded Rationality: A Case Study of Nanchang City, China. J. Adv. Transp. 2020, 2020, 8851372. [Google Scholar] [CrossRef]
- Mouskos, K.; Tvantzis, J.; Bernstein, D.; Sansil, A. Mathematical formulation of a deterministic parking reservation system (prs) with fixed costs. In Proceedings of the 10th Mediterranean Electrotechnical Conference, Information Technology and Electrotechnology for the Mediterranean Countries, Lemesos, Cyprus, 29–31 May 2000. [Google Scholar]
- Thipgen, C. Giving parking the time of day: A case study of a novel parking occupancy measure and an evaluation of infill development and carsharing as solutions to parking oversupply. Res. Transp. Bus. Manag. 2018, 29, 239–254. [Google Scholar] [CrossRef]
- Smith, M.S. Shared Parking. Methodology 2005. Available online: https://xueshu.baidu.com/usercenter/paper/show?paperid=482f50372d86ea8162a3f7595a8deaf6 (accessed on 12 December 2022).
- Xu, S.; Cheng, M.; Kong, X.T.; Yang, H.; Huang, G.Q. Private parking slot sharing. Transp. Res. Part B Methodol. 2016, 93, 596–617. [Google Scholar] [CrossRef]
- Litman, T.A. Parking Management Strategies, Evaluation and Planning; Routledge: London, UK, 2006. [Google Scholar]
- Yang, B.; Yuan, Z.Z.; Yang, Y. The Study on Allocation Model of Shared Parking Slots in Multi-parking Lots. In Proceedings of the International Conference on Mechatronics, Gippsland, Australia, 13–15 February 2017. [Google Scholar] [CrossRef] [Green Version]
- Smith, M.S. Shared Parking; Urban Land Institute: Washington, DC, USA, 1983; p. 15. [Google Scholar]
- Zhang, W. Development status and countermeasures of shared parking. Mod. Bus. Trade Ind. 2022, 43, 49–50. [Google Scholar] [CrossRef]
- Jian, S.; Liu, W.; Wang, X.; Yang, H.; Waller, S.T. On integrating carsharing and parking sharing services. Transp. Res. Part B Methodol. 2020, 142, 19–44. [Google Scholar] [CrossRef]
- Huang, K.; de Almeida Correia, G.H.; An, K. Solving the station-based one-way carsharing network planning problem with relocations and non-linear demand. Transp. Res. Part C Emerg. Technol. 2018, 90, 1–7. [Google Scholar] [CrossRef]
- Song, X.; Jump, S.; Xiao, N.; Zhou, C.; Cui, X. Study on the Influence Pedigree of the Formulation and Implementation of Urban Shared Parking Policy in China. J. Transp. Eng. 2022, 22, 46–51. [Google Scholar] [CrossRef]
- Tan, B.Q.; Xu, S.X.; Xu, G.Y.; Zhou, Y.M. Optimal Parking Space Allocation Based on Combinatorial Auction and Uniform Price. J. Transp. Syst. Eng. Inf. Technol. 2021, 21, 193–199. [Google Scholar] [CrossRef]
- Gao, L.; Zheng, L.; Ji, Y. Parking Pricing Method Based on Flexible Parking Incentive Mechanism and Risk Perception. J. Transp. Syst. Eng. Inf. Technol. 2021, 21, 6. [Google Scholar] [CrossRef]
- Wang, P.; Guan, H. Modeling and solving the optimal allocation-pricing of public parking resources problem in urban-scale network. Transp. Res. Part B 2020, 137, prepublish. [Google Scholar] [CrossRef]
- Toorai, R.; Petro, A. On-Street and Off-Street Parking Availability Prediction Using Multivariate Spatiotemporal Models. IEEE Trans. Intell. Transp. Syst. 2015, 1, 2913–2924. [Google Scholar] [CrossRef]
- Jin, Y. Parking Demand Prediction Based on LSTM Recurrent Neural Network. Logist. Eng. Manag. 2020, 42, 147–150. [Google Scholar] [CrossRef]
- She, F.; Qiu, J.; Tang, M. Simulation of prediction for free parking spaces in large parking lots. Appl. Res. Comput. 2019, 36, 851–854. [Google Scholar] [CrossRef]
- Commission, Shanghai Municipal Transportation. Guidance on Promoting the Shared Parking Resources in Shanghai; Commission, Shanghai Municipal Transportation: Shanghai, China, 2016. (In Chinese) [Google Scholar]
- Beijing People’s Congress Committee. Parking Management Regulations for Automotive Vehicles in Beijing; Beijing People’s Congress Committee: Beijing, China, 2018. (In Chinese)
- Chatman, D.G.; Manville, M. Theory versus implementation in congestion-priced parking: An evaluation of SF park, 2011–2012. Res. Transp. Econ. 2014, 44, 52–60. [Google Scholar] [CrossRef]
- Chen, Z.; Liu, K.; Wang, J.; Yamamoto, T. H-ConvLSTM-based bagging learning approach for ride-hailing demand prediction considering imbalance problems and sparse uncertainty. Transp. Res. Part C 2022, 140, 103709. [Google Scholar] [CrossRef]
- Li, L.; Li, Y. Short-term Prediction of Parking Demand for Parking Delicacy Management. J. Tongji Univ. Nat. Sci. 2021, 49, 1301–1306. [Google Scholar] [CrossRef]
- Avineri, E.; Prashker, J. Sensitivity to travel time variability: Travelers’ learning perspective. Transp. Res. Part C Emerg. Technol. 2005, 13, 157–183. [Google Scholar] [CrossRef]
- Ottomanelli, M.; Dell’Orco, M.; Sassanelli, D. Modelling parking choice behaviour using Possibility Theory. Transp. Plan. Technol. 2011, 34, 647–667. [Google Scholar] [CrossRef]
- Zhao, L.; Zhang, X. A Prospect Theory-Based Route Choice Model of Traveler with Prior Information. J. Transp. Syst. Eng. Inf. Technol. 2006, 6, 42–46. [Google Scholar]
- Mahmassani, H.S.; Chang, G.-L. On boundedly rational user equilibrium in transportation systems. Transp. Sci. 1987, 21, 89–99. [Google Scholar] [CrossRef]
- Tversky, A.; Kahneman, D. Rational Choice and the Framing of Decisions. J. Bus. 1986, 59, S251–S278. [Google Scholar] [CrossRef]
- Tversky, A.; Kahneman, D. Advances in Prospect Theory: Cumulative Representation of Uncertainty. J. Risk Uncertain. 1992, 5, 297–323. [Google Scholar] [CrossRef]
- Guan, H.Z. Disaggregate Model-Traffic Behavior Analysis Tools; China Communication Press: Beijing, China, 2004. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | Survey Content | Options | Number of Respondents | Percentage |
|---|---|---|---|---|
| 1 | Gender | Male | 49 | 51.00% |
| Female | 48 | 49.00% | ||
| 2 | Age | 18–25 | 7 | 7.22% |
| 26–35 | 22 | 22.68% | ||
| 36–45 | 50 | 51.55% | ||
| >45 | 18 | 18.55% | ||
| 3 | Monthly income (CNY) | <3000 | 0 | 0% |
| 3000–4999 | 16 | 16.00% | ||
| 5000–6999 | 46 | 47.00% | ||
| 7000–10,000 | 29 | 30.00% | ||
| >10,000 | 6 | 6.00% | ||
| 4 | Driving experience | One year or less | 3 | 88.37% |
| Two to five years | 27 | |||
| Six to ten years | 54 | |||
| More than ten years | 13 | 11.63% | ||
| 5 | Emotional factors (Multiple choice) | Mood | 66 | 40.50% |
| Feelings | 49 | 30.06% | ||
| Hobbies | 22 | 13.49% | ||
| None | 26 | 15.95% | ||
| 6 | Time slots for renting parking spaces | 8:00~10:00 | 8 | 2.69% |
| 10:00~12:00 | 48 | 16.16% | ||
| 12:00~14:00 | 83 | 27.95% | ||
| 14:00~16:00 | 92 | 30.98% | ||
| 16:00~18:00 | 60 | 20.20% | ||
| 18:00~20:00 | 6 | 2.02% | ||
| 7 | Parking difficulty affect choice | Yes | 64 | 66.00% |
| No | 33 | 34.00% | ||
| 8 | Influence of external factors on parking space rental | Fill in | 97 | 18.60% |
| 9 | Nearby parking lot prices | Fill in | 97 | —— |
| 10 | Acceptable lowest rental prices | Fill in | 97 | —— |
| 11 | Acceptable highest rental prices | Fill in | 97 | —— |
| 12 | Rental prices for 50% success | Fill in | 97 | —— |
| 13 | Rental prices for 80% success | Fill in | 97 | —— |
| Price of Difference (CNY/h) | True Value of Cumulative Frequency (%) | Theoretical Value of Cumulative Frequency (%) | Relative Error (%) |
|---|---|---|---|
| 1 | 15.46% | 15.43% | 0.25% |
| 2 | 28.87% | 28.39% | 1.66% |
| 3 | 40.21% | 40.56% | −0.88% |
| 4 | 37.11% | 37.74% | −1.68% |
| 5 | 21.65% | 20.50% | 5.29% |
| 7 | 3.09% | 2.20% | 29.03% |
| 8 | 5.15% | 4.04% | 21.63% |
| 9 | 6.19% | 5.77% | 6.69% |
| 10 | 7.22% | 7.43% | −3.02% |
| 11 | 8.25% | 9.05% | −9.70% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xue, Y.; Kong, Q.; Sun, F.; Zhong, M.; Tu, H.; Tan, C.; Guan, H. Shared Parking Decision Behavior of Parking Space Owners and Car Travelers Based on Prospect Theory—A Case Study of Nanchang City, China. Sustainability 2022, 14, 16877. https://doi.org/10.3390/su142416877
Xue Y, Kong Q, Sun F, Zhong M, Tu H, Tan C, Guan H. Shared Parking Decision Behavior of Parking Space Owners and Car Travelers Based on Prospect Theory—A Case Study of Nanchang City, China. Sustainability. 2022; 14(24):16877. https://doi.org/10.3390/su142416877
Chicago/Turabian StyleXue, Yunqiang, Qifang Kong, Feng Sun, Meng Zhong, Haokai Tu, Caifeng Tan, and Hongzhi Guan. 2022. "Shared Parking Decision Behavior of Parking Space Owners and Car Travelers Based on Prospect Theory—A Case Study of Nanchang City, China" Sustainability 14, no. 24: 16877. https://doi.org/10.3390/su142416877