1. Introduction
Parking has been considered a problem for several decades due to the increasing number of vehicles and the limited number of parking spaces at locations of interest (LOI), such as city centers, shopping centers, airports, etc. Some of the common problems associated with parking are additional cruising, pollution, congestion, and driver frustration. This is a common problem across the globe, where the severity of these problems increases with higher population density. The intensity of these problems varies spatially and temporally [
1,
2]. Further, the problem intensifies during peak hours when traffic flow is high, which also leads to accidents [
3,
4,
5,
6]. According to a study in the central city area of Zurich, parking occupancy was around 97% on a weekend, leading to congestion and pollution [
7]. Based on a group of studies mentioned in Shoup (2015) [
3], the cruising time to find a vacant parking space was between 3.5 and 14 min. Cruising is defined as a slow-moving vehicle in search of a parking space, and this cruising behavior is commonly observed in parking lots. Searching for an empty parking space leads to cruising and frequent stops which increases CO
2 emissions [
8]. Prolonged exposure to harmful emissions, such as CO
2, can lead to respiratory diseases like asthma [
9]. Carbon and other emissions, such as nitrogen oxide and carbon monoxide, peak during the morning and evening times. Therefore, there is a need to understand the magnitude of these problems occurring at parking lots, where frequent pedestrian movement is observed. Passenger vehicles account for 66% of pollution emitted by road traffic [
10]. Hence, it is necessary to look at the cruising behavior performed by many vehicles in search of empty parking spaces.
According to Weinberger et al., (2020) [
11], cruising time and distance depend on the configuration of the city, time, and location of parking spaces. However, there are not many studies that compare optimal and non-optimal cruising behavior to find an empty parking space. Based on Weinberger et al., (2020), it is considered optimal if the driver finds an empty parking space within a threshold distance, while it is non-optimal if the driver takes more than the threshold distance to find an empty parking space. Cruising non-optimal distances also increase CO
2 emissions. To the best of our knowledge, most studies on parking behavior have focused on on-street parking lots [
12]. Only a fraction of the studies focused on cruising behavior in open parking lots. This is problematic since parking lots are areas of high pollution due to the large number of cruising vehicles in search of empty parking spaces, especially during peak hours and at locations of interest. Unlike CO
2 emissions observed at long road segments, CO
2 emissions observed in an open parking lot are concentrated in a smaller geographical area. Parking lots comprise the movement of people and vehicles, and people are directly affected by the emitted CO
2 emissions. Parking lots are classified into two categories: open and closed. Closed parking lots provide parking spaces that are not free, while open parking lots provide free parking spaces for a limited duration. The demand for parking spaces is higher in open parking lots as they are free. Therefore, vehicle traffic is high in open parking lots compared to closed parking lots [
13]. Parking lots occupy large geographical areas, sometimes more than needed, and it is vital to utilize these areas efficiently [
14]. Understanding cruising behavior will give insight into improving the design of parking lots, which will also facilitate the reduction of non-optimal cruising. Non-optimal cruising distances may not be larger in open parking lots, compared to on-street parking lots. However, the number of vehicles searching for empty parking spaces is higher in open parking lots due to higher capacity and free parking spaces. Thus, greater demand for parking spaces leads to higher traffic, congestion, and CO
2 emissions in open parking lots.
One problem observed is the methodology used to study cruising behavior in previous studies. Based on van der Waerden et al., (2015) [
15], travel surveys were utilized to understand cruising behavior characteristics, such as choice and parking search time. However, it is limited to the number of respondents and recollection of the driver’s memory. Therefore, suitable sensors can be utilized to collect vehicle movement data to understand cruising behavior. Sensors, such as optical cameras, onboard sensors, and Global Positioning System (GPS), can be utilized to capture data from parking lots. However, GPS data is dependent on volunteers and accuracy. Furthermore, using underground sensors requires expensive installation on an open parking lot, and the use of optical cameras has illumination and privacy issues. Therefore, thermal cameras were utilized in this study as they overcome various illumination and privacy issues. To the best of our knowledge, this is the first time a thermal camera was used to identify cruising behavior in an open parking lot. Usage of the thermal camera also facilitates obtaining an overview of multiple moving vehicles using a single device. The CO
2 emitted from an open parking lot was also not estimated in any of the previous studies. This study provides a glimpse of CO
2 emissions emitted during peak and non-peak hours.
This study aims to estimate excess CO2 emissions from the observed cruising of drivers searching for empty parking spaces. To address this aim, the vehicles’ optimal and non-optimal cruising distance, CO2 emissions, time taken by drivers to reach an empty parking space, and the proximity to LOI are examined. The following research questions are established:
What are the estimated CO2 emissions caused by optimal and non-optimal cruising in the open parking lot?
How much optimal and non-optimal cruising time are taken to find an empty parking space?
Does the choice of parking space impact CO2 emissions?
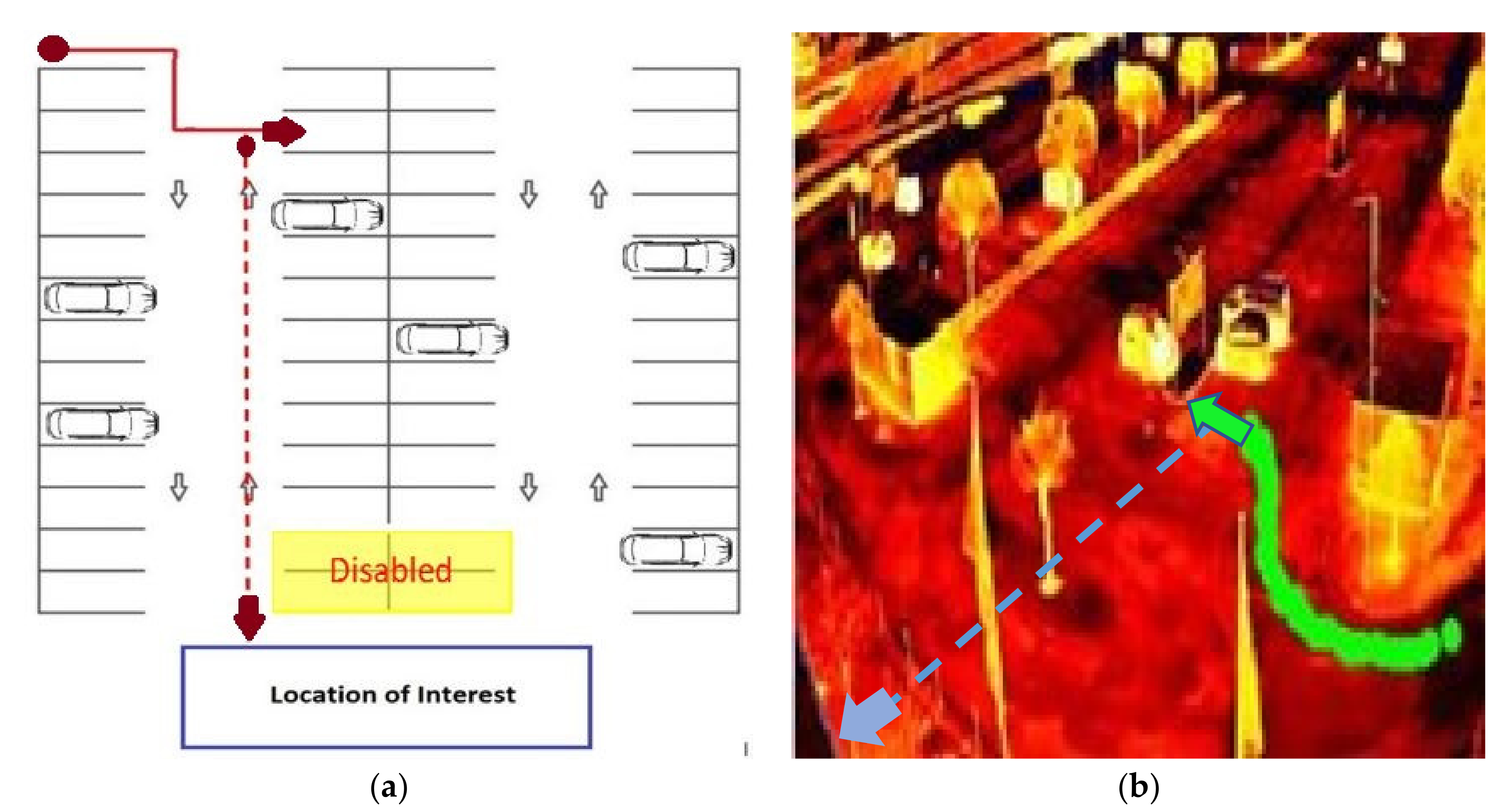
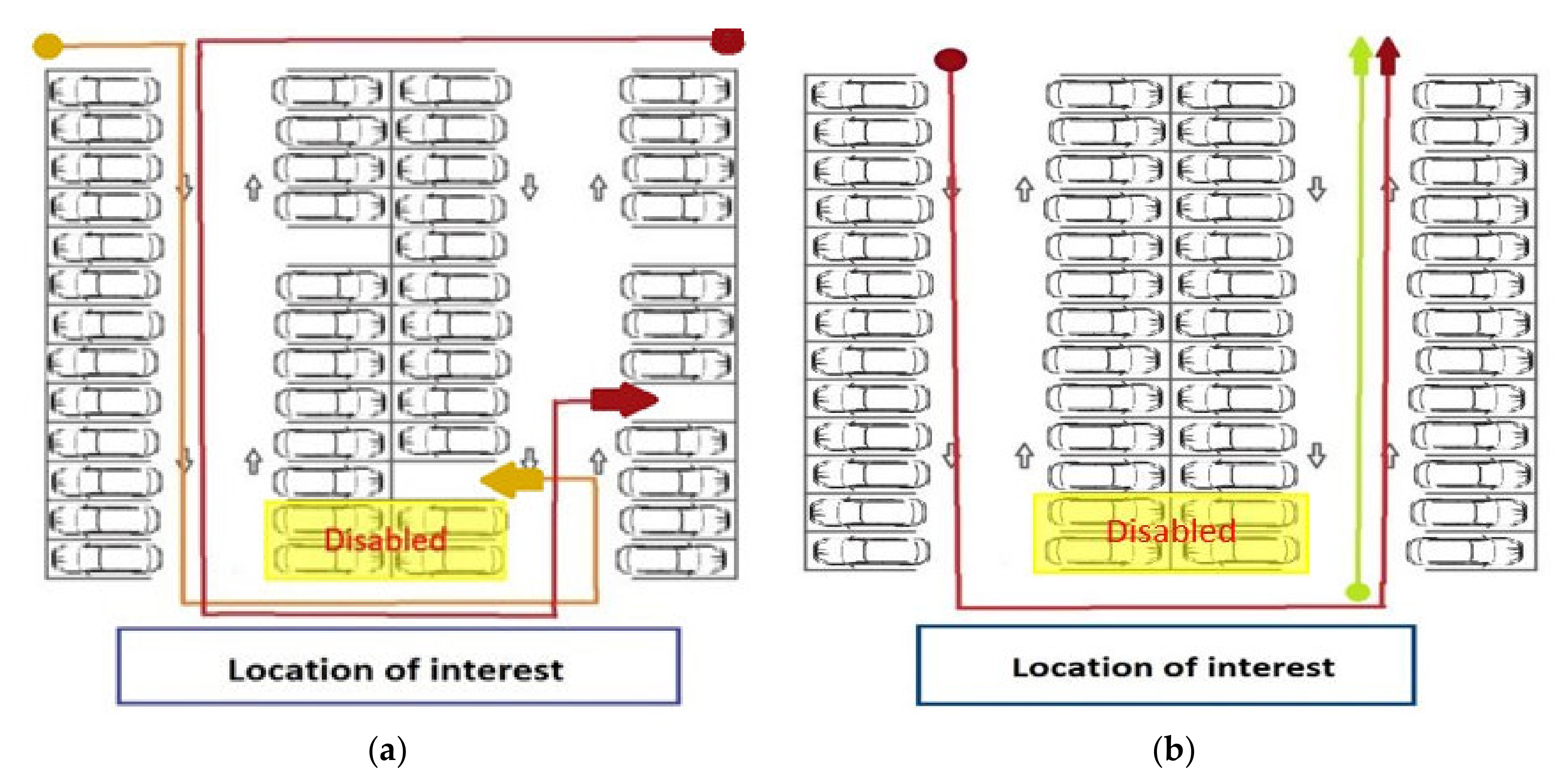
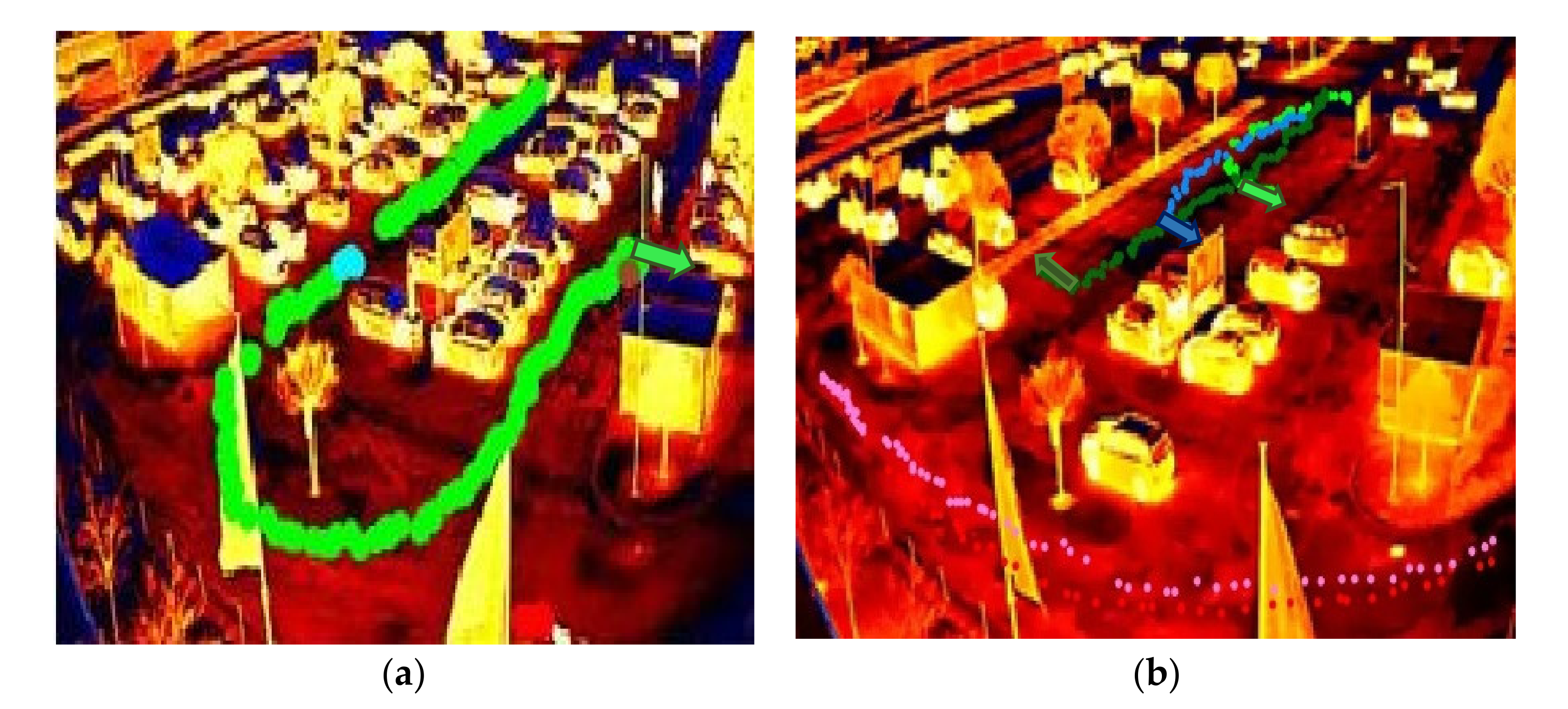
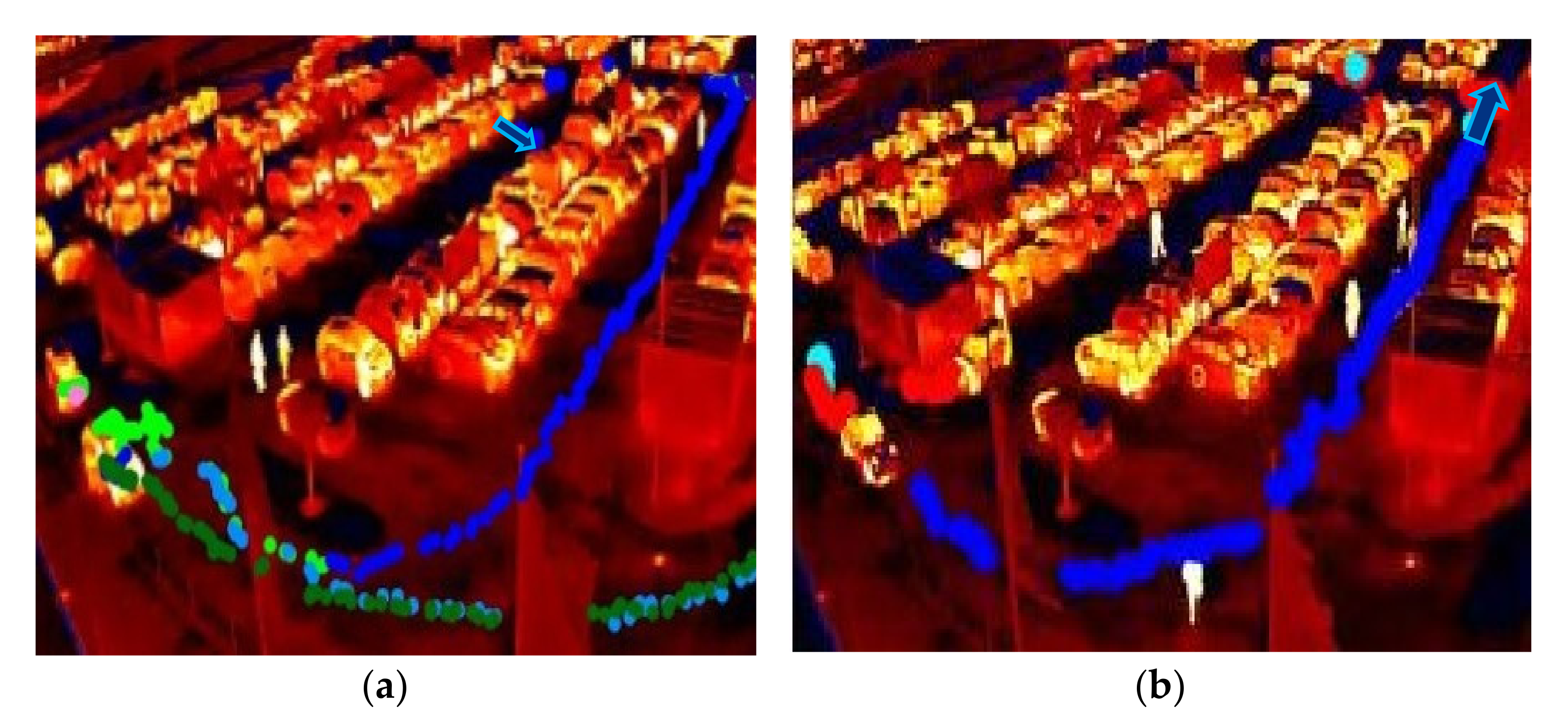
In this study, optimal distance refers to if the driver occupies an empty parking space in the entered parking lane. Non-optimal distance refers to if the driver misses at least one empty parking space in the entered lane and occupies an empty parking space in another lane. Cruised distance is calculated using the trajectory of each vehicle. CO2 emissions are estimated using the cruised distance and average CO2 emissions. Parking choice is based on the selection of parking space and its proximity to the entrance of the location of interest.
The following are the contributions of this study:
The study utilizes vehicle cruising trajectories in an open parking lot to calculate cruising distance, walking distance, and time. Cruising distance of multiple drivers helps us to understand the magnitude of cruising performed in open parking lots.
Since the area of study is a small geographical area, an open parking lot, a new CO2 emissions model is proposed that is suitable for smaller areas based on fuel consumption.
Analysis of observed cruising behavior will also contribute to improving the design of parking lots and facilitate the reduction of CO2 emissions. For instance, based on the frequency of vehicles, the duration of parking time can be modified to accommodate more vehicles. Due to shorter parking time, there will be more available empty parking spaces, and vehicle traffic to these parking spaces can also be reduced, leading to less pollution.
The remaining sections of the study are organized in the following way:
Section 2 discusses relevant literature on cruising behavior.
Section 3 presents the method and discusses the process of data collection and analysis.
Section 4 discusses and analyses results. Finally,
Section 5 presents limitations and
Section 6 presents our conclusion.
2. Related Work
Parking search behavior in previous studies is analyzed and discussed in this section. Similar studies utilized various data collection methods, such as travel diaries or surveys, onboard sensors, GPS, and stationary cameras. The suitability of data collection methods for open parking lots is also discussed. In a study by Brooke et al., (2014) [
16], travel survey data was used to analyze the time taken by drivers to occupy an empty parking space. The study was conducted in the Netherlands where there were no open parking lots. Cruising times were estimated by the driver, from the vehicle entering a parking facility and occupying an empty parking space. The average time taken by drivers to occupy an empty parking space was 36 s. The average search time across multiple parking lots is low, as no open parking lots leads to higher demand and traffic. The study identified that higher search time led to higher parking duration. There was a small percentage of drivers who took more than 3 min to find a vacant parking space. Similarly, in another study, an online questionnaire was conducted which identified the influence of previous experience in the selection of parking lots [
15]. The cruising time and choice of parking lot location details were dependent on the accuracy of respondents’ input. The use of surveys limits the data to a specific set of respondents, and it is not possible to obtain an overview of all the drivers who parked their vehicles in a parking lot.
In Hampshire et al., (2016) [
17], parking search behavior was analyzed using an onboard camera and a GPS device in the vehicle. GPS was used to track the route and time of the search, while gestures of the driver were used to identify the start of the parking search. The study identified that the driver tended to search for a parking space for 100 m before occupying an empty parking space. An onboard camera was installed to observe the driver, and naturalistic movements of drivers were used to identify if the driver began to search for an empty parking space. Other similar studies have utilized onboard cameras and radars to analyze cruising behavior, not in parking lots but on highways, in multiple lanes, and at roundabouts [
18,
19]. The use of onboard sensors, radars, or GPS limits the study to specific vehicles or volunteers. An overview of multiple drivers is not possible using onboard sensors. Similarly, in Garcia et al., (2012) and Verma et al., (2018) [
20,
21], the fusion of camera and sensor data was performed to detect and track vehicle movement. Trajectories were generated to identify different vehicles maneuvers, such as lane changing, overtaking, and turning. Usage of cameras would enable us to get an overview of the driving behavior of multiple observed drivers. However, privacy issues may arise, as vehicles or people can be recognized using optical cameras. In addition, millimeter-wave radar has been used to alert researchers to the proximity of other vehicles on the road [
22]. However, millimeter-wave radar has limited field view, making it difficult to detect vehicles in multiple lanes.
GPS data to analyze parking search behavior is objective and not based on estimation, unlike surveys, travel diaries, or visual inspection [
23]. In one study, [
24], parking search behavior was analyzed using GPS devices in a city in Belgium. A GPS logger with 3 s signal frequency was used to capture driving behavior. The average time to find a vacant parking space was 1.18 min. Parking search time was higher in this study as it focused on on-street parking lots in the city center, where vehicle traffic was higher than the available number of parking spaces. Similarly, another study utilized GPS data to identify and analyze the cruising of vehicles, where excess cruising was found in 6% of total vehicle trips [
11]. If the cruising distance was more than 200 m, then drivers who took that route were assumed to drive an additional distance to reach their destination. The study collected data using GPS and performed map matching to measure the cruising distance of the vehicle. In addition, in this study, the driving path of the vehicles was map matched to capture traveled distance in the open parking lot. Walking distance was used to identify the choice of parking space, based on its proximity to the location of interest. The open parking lot chosen consisted of a few parking spaces closer to the LOI, while a few parking spaces were located further apart from the LOI. Walking distance to the LOI would provide the driver’s preference in the selection of empty parking spaces. Driving distance alone would not provide insight into a driver’s preference, as a driver can cruise non-optimally to occupy an empty parking space. However, this is only applicable when there are several empty parking spaces available. Similarly, in Montini et al., (2012) [
23], walking distance was used to observe the distance between the parked vehicle location and the destination in a cluster of parking lots, using GPS data. The study identified that an acceptable walking distance to reach a destination was 600 m as it covered multiple parking lots. A radius of 800 m around the parking lot was a parking search starting point and based on the stop location, walking distance to the destination was measured. GPS is capable of capturing long vehicle trajectories, but the accuracy of data is dependent on several factors, such as the satellite’s position, weather conditions, and other obstructing structures [
25]. A GPS device should be carried by the driver or a mobile application for GPS tracking while the driver is cruising in the parking lot should be used. The study would be limited to a few volunteers where accuracy is dependent on external conditions. The route taken by the driver might not be ascertained in an open parking lot, due to limitations in the frequency of GPS signals. Therefore, GPS is not well suited to identify cruising behavior in an open parking lot.
Detection and tracking of vehicles over continuous frames is complicated, due to occlusion and size variability, based on distance and position [
22]. One study utilized a stationary camera and estimated that 15% of total traffic was cruising for parking [
26]. A sample of 876 observations was made on two days in September 2017. The camera was mounted on lamps and signal poles overseeing an on-street parking lot. After a car vacates a parking space, the number of vehicles passing the vacant parking space is counted until the vacant parking space is again occupied. Using the number of traversed vehicles, the method estimates the number of vehicles cruising for parking. In another study, an optical camera was utilized to capture data, and vehicle trajectories were generated over a road segment, using the background subtraction method [
27]. Speed, acceleration, and deceleration of multiple vehicles were captured, which will be useful for city planning administrators. In another study, background subtraction, corner-feature tracking, and cluster tracking were used to track and draw trajectories of pedestrians, bicycles, and vehicles [
28]. Usage of videos would limit the study to a particular place or parking lot [
11]. The movement of all vehicles within camera range can be captured and analyzed, which makes it a suitable approach for this paper. However, the usage of an optical camera might present problems of varying illumination conditions and privacy concerns.
Carbon and other harmful emissions were estimated for several vehicle categories, such as car, truck, and bus [
29]. These pollutant emissions coefficients were utilized in Song et al., (2019) [
30] to estimate emission levels at several zones, such as an expressway, a business zone, an industrial zone, and ports. Surveillance cameras were utilized to collect vehicle traffic data in those zones. Vehicles were detected using Yolo, which is a deep learning algorithm used to obtain a vehicle count. The count of vehicles was multiplied by the pollutant emissions coefficient to estimate emission levels, and it was found that pollution levels from cars were highest at business zones, such as shopping centers. This study also captures the distance of cruising vehicles in the parking lot. Therefore, the method proposed in [
31] was relevant for estimating carbon emissions. The method defines pollution coefficients for cruising vehicles in urban conditions. In Jia et al., (2013) [
32], GPS was utilized to calculate CO
2 emissions to and from a popular shopping center. The data was collected from 151 volunteers using a portable GPS device. The average CO
2 emissions amount identified for drivers traveling to the shopping center was 176 g/km. Usage of GPS provides more details, such as velocity and timestamp, compared to usage of videos. GPS is commonly utilized for a larger geographical area, where the signal frequency is between 5 and 30 s. However, in this study, cruising of drivers is observed only in the parking lot, which is a smaller geographical area. Therefore, usage of GPS is not reliable as it requires a frequency ping every 1 s. The usage of GPS limits the study to a certain number of volunteers. Therefore, a camera would give a broader overview of cruising behavior and CO
2 emissions in a parking lot.
4. Results and Discussion
This section discusses the results generated in this paper. The cruising distance and walking distances were compared for peak and non-peak hours to understand the correlation. Similarly, time taken to find an empty parking space was plotted to understand average parking times. The calculated cruising distances and CO2 emissions of multiple drivers searching for empty parking spaces are summarized and discussed.
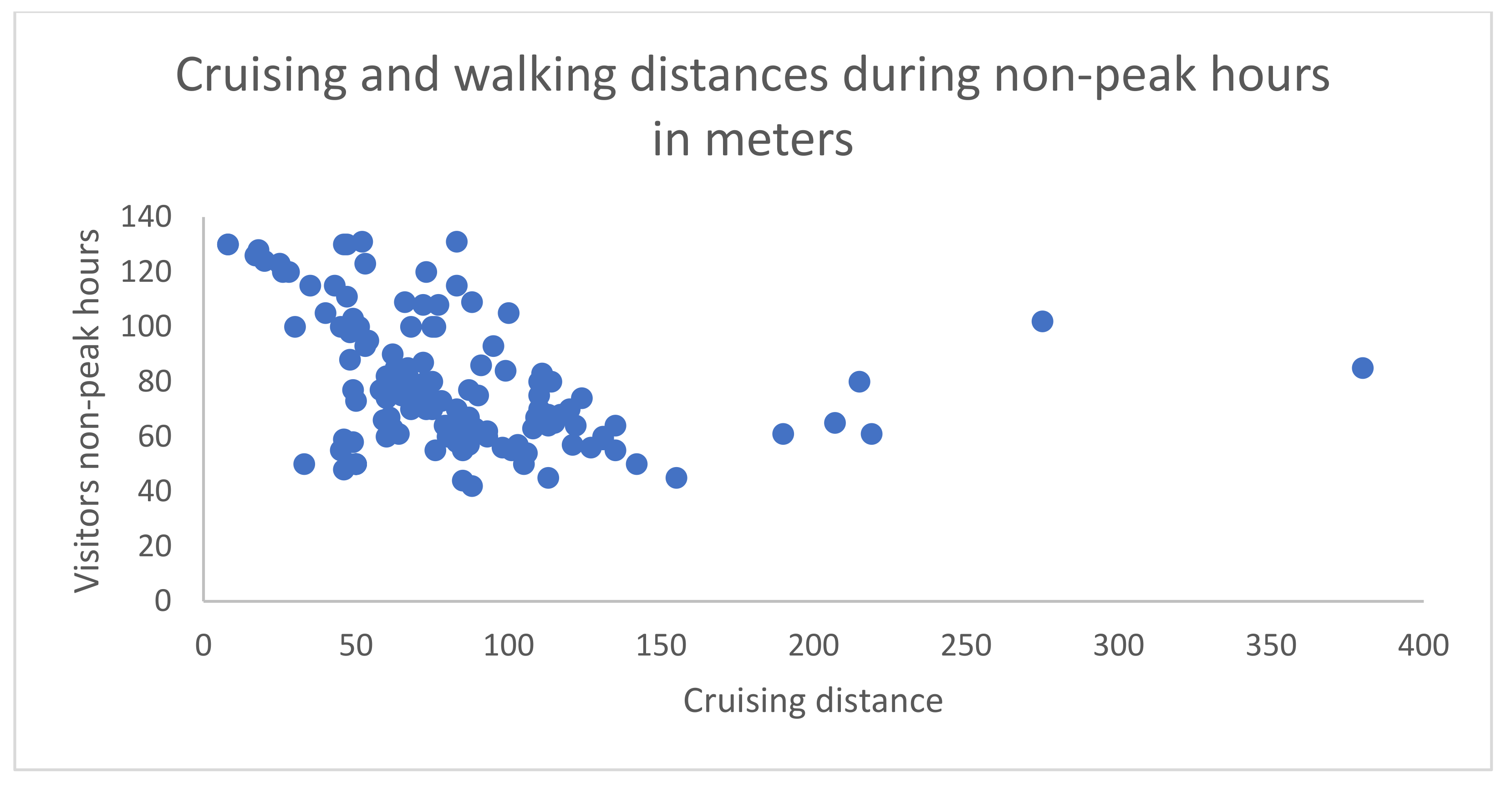
When the traffic density is low, the majority of the drivers park near the location of interest, which might be to reduce the walking distance from the parking location to the shopping center.
Figure 8 illustrates the walking and cruising distances observed in visitor non-peak hours for two days. The majority of drivers traveled less than 200 m as there were several empty parking spaces. One driver cruised for nearly 400 m to find an empty parking space. However, this can be regarded as an outlier as it was unusual cruising behavior.
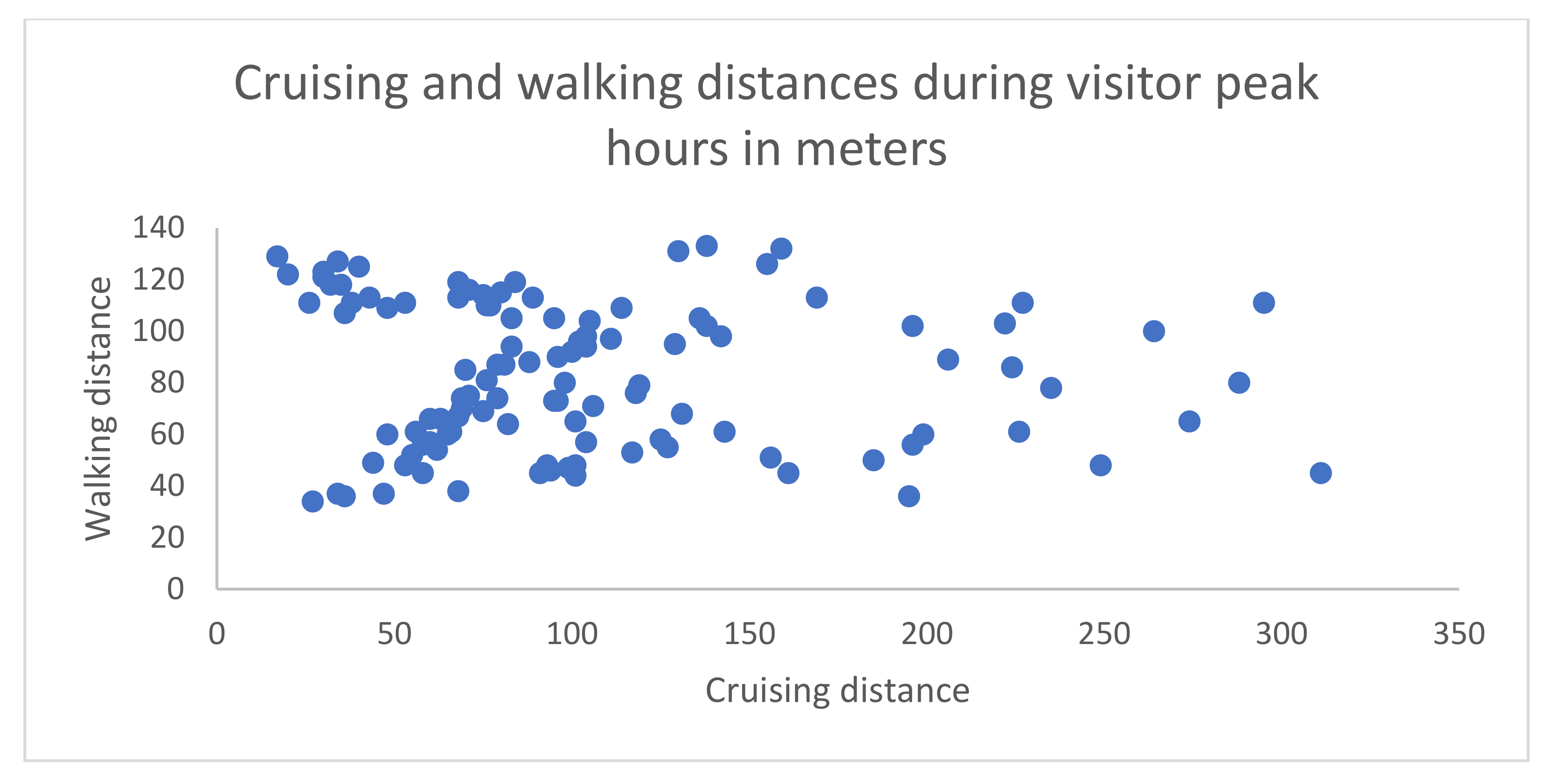
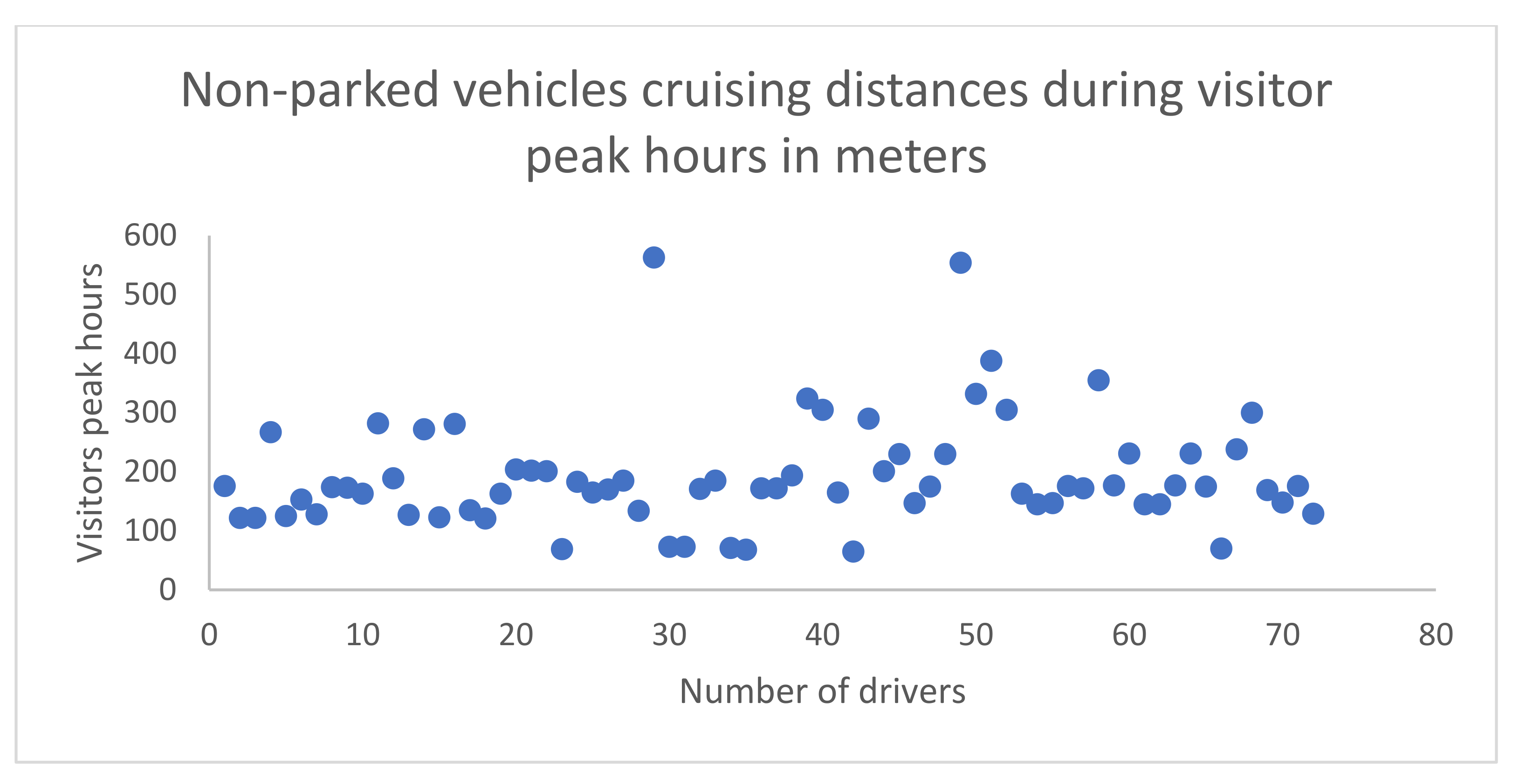
Figure 9 illustrates the walking and cruising distances observed for two days in visitor peak hours. The number of drivers searching for a parking space during visitor peak hours was larger than visitor non-peak hours, demonstrating that peak traffic also exists within parking lots. Higher vehicle traffic leads to a greater number of cruising vehicles, which also increases CO
2 emissions. Due to a smaller number of available empty parking spaces, the increased number of drivers traveling non-optimal distances can be seen in
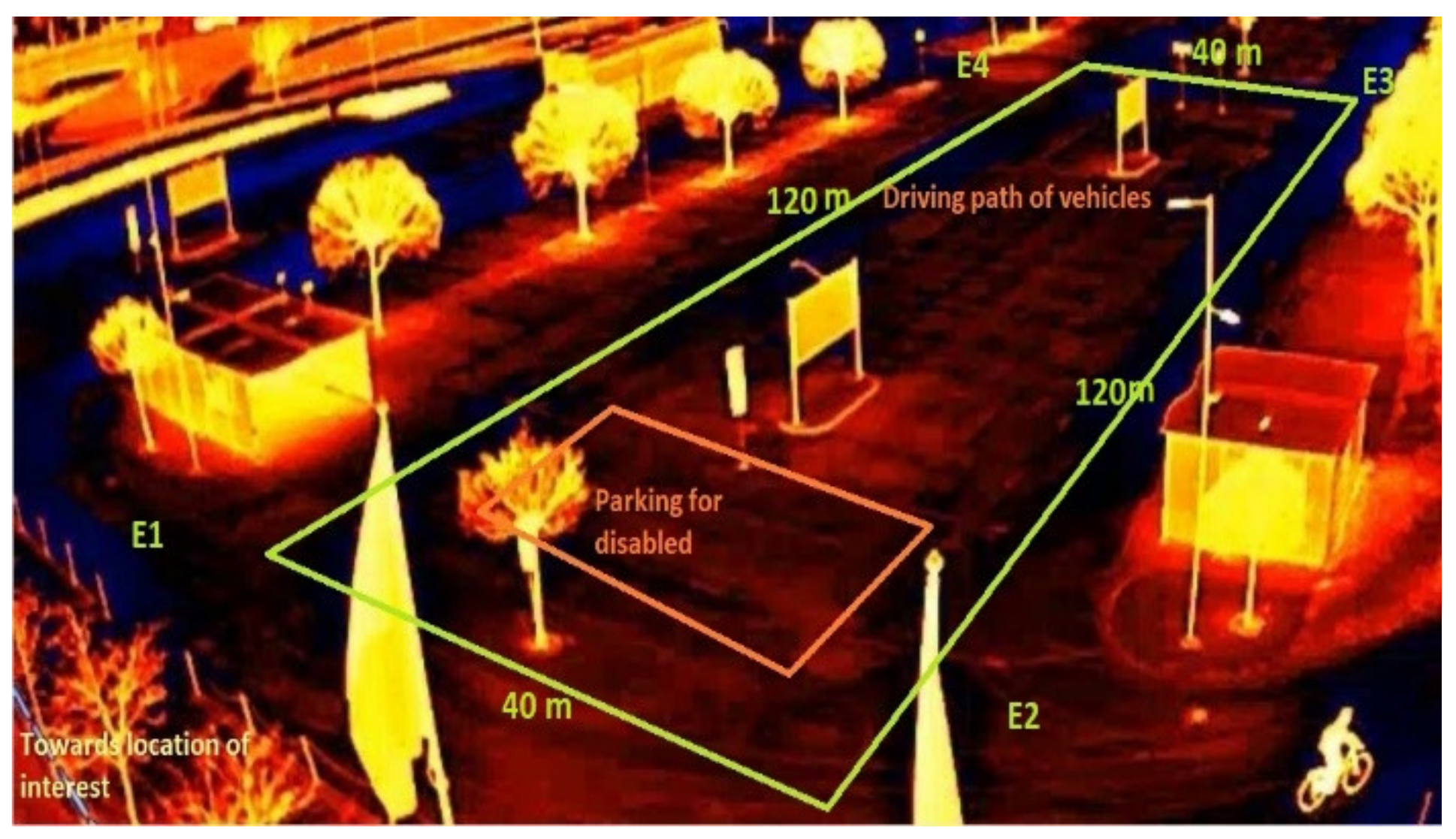
Figure 9. More drivers cruised more than 200 m during visitor peak hours, due to a lower number of available empty parking spaces. One row of the parking lane is 120 m and there were several drivers who cruised more to find an empty parking space.
Figure 9 excludes the drivers who could not find an empty parking space. The drivers who were unable to park their vehicles cruised for longer, as illustrated in
Figure 10.
Unlike during visitor non-peak hours, not all drivers could find an empty parking space during visitor peak hours. The drivers who could not find an empty parking space are illustrated in
Figure 10. As illustrated in
Figure 10, two drivers cruised more than 500 m in the ROI and still could not find an empty parking space. All the drivers performed additional cruising when they could not find an empty parking space in the ROI. As observed in this study, most of the drivers were looking for empty parking spaces near the shopping center, leading to higher traffic. Even though these drivers could not find an empty parking space in the ROI, this is not assumed as non-optimal in this study. A total of 244 drivers managed to find an empty parking space out of 316 total observed drivers.
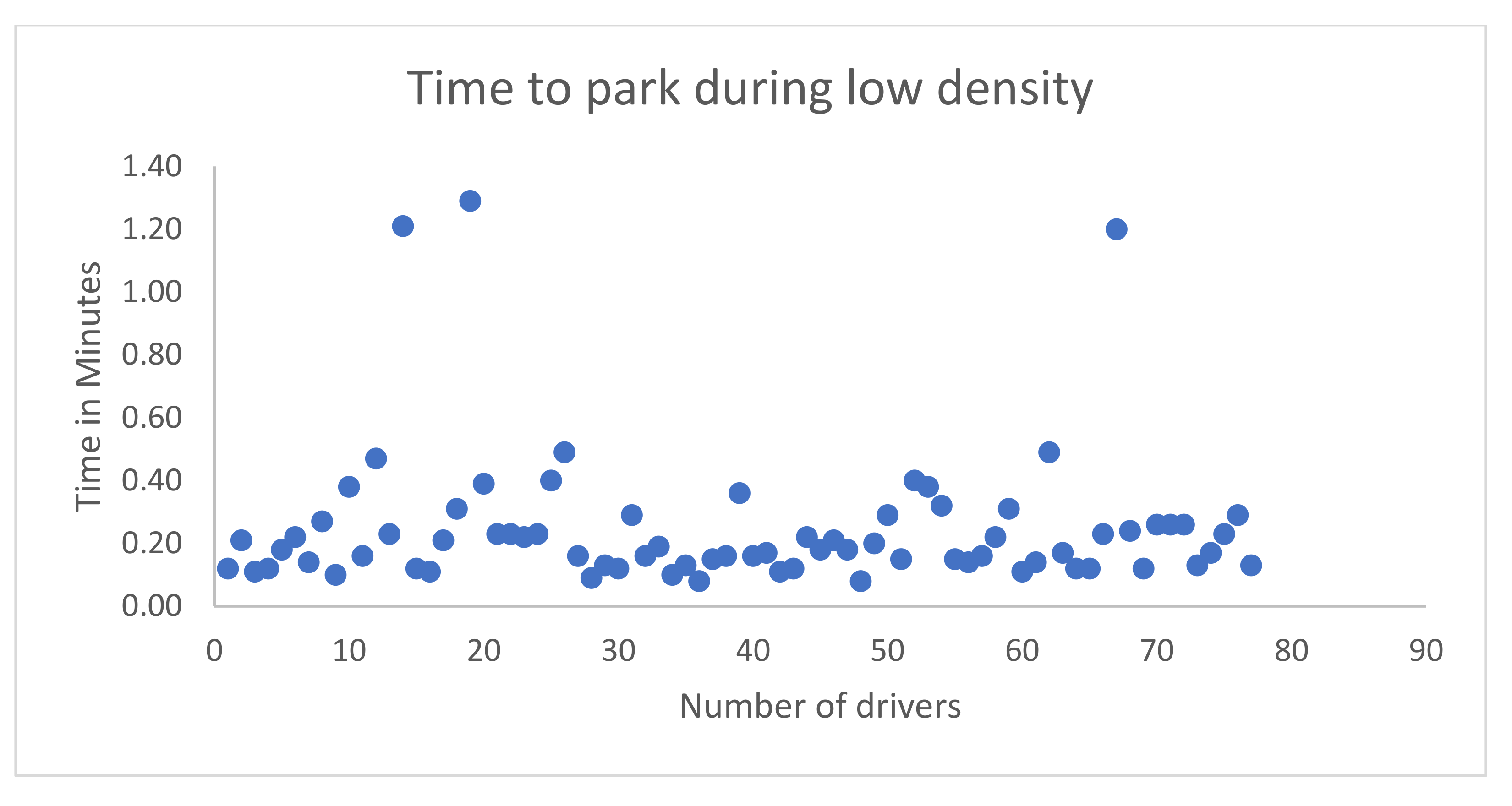
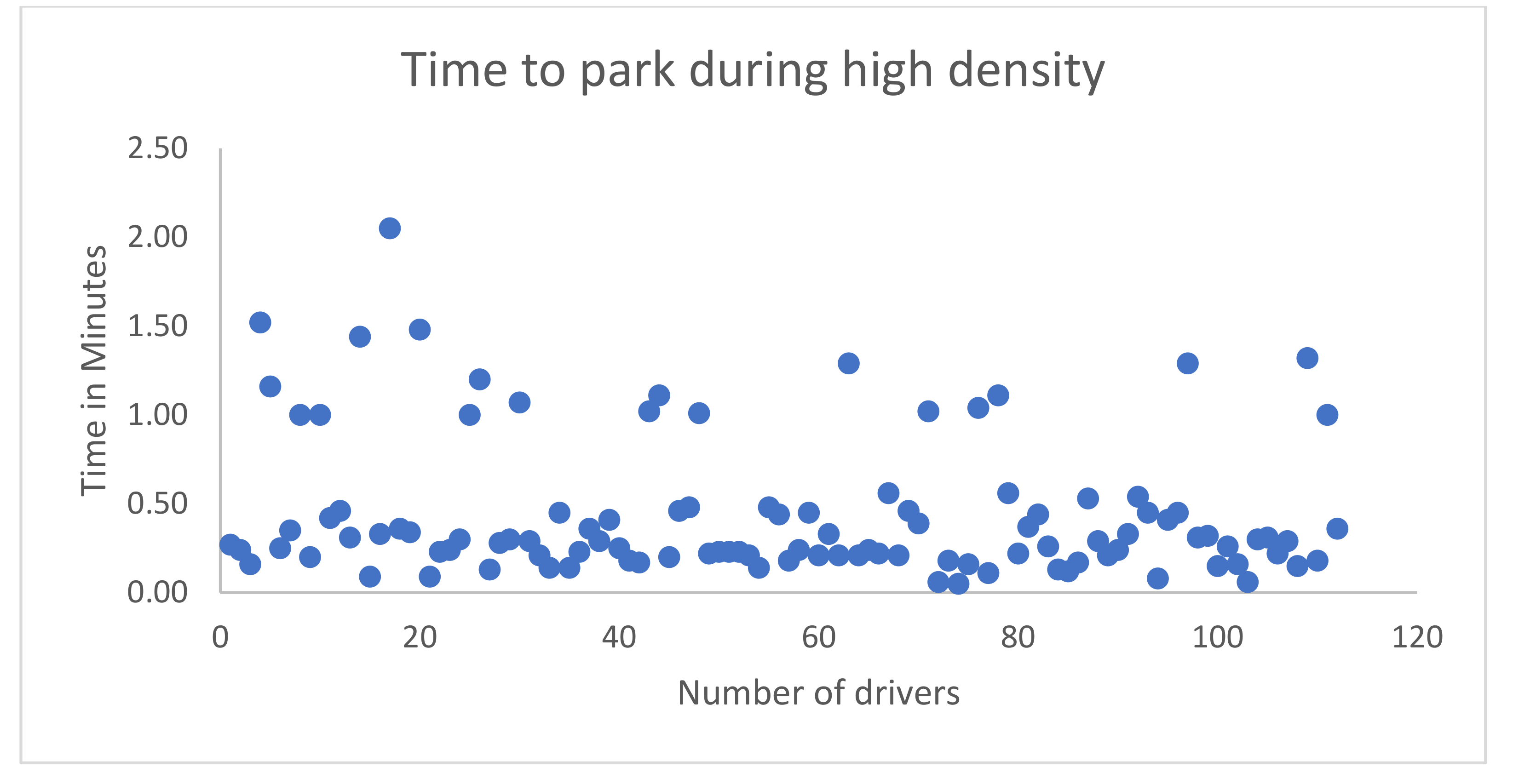
The time taken to find an empty parking space in visitor non-peak hours is shown in
Figure 11, while the time taken to find an empty parking space in visitor peak hours is shown in
Figure 12. Based on
Figure 11 and
Figure 12, it is evident that the amount of time to find an empty parking space is longer during visitor peak hours. There were only four drivers who took approximately 1 min to find an empty parking space during visitor non-peak hours. However, during visitor peak hours, 19 drivers took more than 1 min to find an empty parking space. During visitor non-peak hours, the average time taken to occupy an empty parking space was 23 s. During visitor peak hours, the average time taken to occupy an empty parking space was 43 s. During peak hours, the number of drivers looking for empty parking spaces also increases due to high traffic, and this leads to higher amounts of CO
2 emissions. A few drivers also idled their vehicles when they learned a driver was about to exit a parking space. This behavior also increased the amount of time taken to park, which also increases CO
2 emissions, as illustrated in
Figure 12. Cruising distance and time were distributed normally during visitor non-peak hours, which had a correlation coefficient of 0.48 and a
p-value of 2.518 × 10
−9. Similarly, during visitor peak hours, cruising distance and time had a correlation coefficient of 0.61, with a p-value of 4.465 × 10
−13. Hence, during both high and non-peak visitor hours, there is a positive correlation between cruising distance and time. Therefore, cruising distance increases with time, which subsequently also increases CO
2 emissions.
Cruised Distances and CO2 Emissions Observed in an Open Parking Lot
The cruising distance of optimal driving is less than 120 m, which is the length of one parking row. However, a non-optimal cruising distance is greater than 120, as the driver leaves the first row and enters the other lane to find a vacant parking space. The mean non-optimal cruising distance is 2.7 times higher than the mean optimal cruising distance. The average non-optimal cruising distance covers 65% of the total length of the ROI, which is 320 m. Mean optimal and non-optimal cruising distances are two extremes identified in finding a vacant parking space. Cruising distance and time are majorly affected by the number of available empty parking spaces and the position of the driver in the parking lot. Hence, due to non-optimal cruising distances, higher levels of CO
2 emissions were emitted. As shown in
Table 2, 9% of the total drivers were cruising non-optimal distances, which amounts to 27% of the total cruising distance in the parking lot. Due to higher cruising distances of non-optimal drivers, a lower proportion of drivers cruised larger distances compared to total optimal cruising distances.
Estimated CO
2 emissions of petrol are illustrated in
Table 3. The CO
2 emissions observed during visitor non-peak and peak hours were similar, even though a lower number of drivers was observed during non-peak hours. During visitor peak hours, due to the lack of available empty parking spaces, 23% of total drivers could not park their vehicles in the ROI. This 23% of drivers was not included in the non-optimal drivers, as they could not find an empty parking space in the ROI. Hence, higher vehicle traffic, non-optimal driving, and lack of empty parking spaces lead to higher CO
2 emissions during visitor peak hours. The mean CO
2 emissions of non-optimal drivers was almost triple, compared to optimal drivers during visitor peak hours. While the mean CO
2 emissions appears to be small, it adds up to higher total CO
2 emissions, due to a higher number of drivers. This was mainly due to a lower number of available empty parking spaces. The majority of drivers drive optimally when there are several empty parking spaces, while they drive non-optimal distances when there are limited available empty parking spaces. Since non-optimal cruising is majorly visible during visitor peak hours, the time taken to occupy an empty parking space is almost doubled.
On a Friday during visitor peak hours, a total of 114 drivers traveled more than 15 km in an area of 320 m searching for empty parking spaces. Even though individual drivers tend to cruise smaller distances, the aggregated distance observed by multiple drivers in the ROI tends to be larger. Thus, it is necessary to reduce CO2 emissions in a parking lot, even though the geographical area of the parking lot is smaller. In open parking lots, non-optimal driving can be reduced by providing real-time or forecast information on available parking spaces.
Based on the identified cruising behavior, drivers tend to choose parking spaces near the location of interest. If a parking assistance system were to provide navigational directions to empty parking spaces, then providing navigational directions to empty parking spaces near the location of interest should be prioritized. However, as the parking spaces near the location of interest are in higher demand, alternative parking spaces should also be shown for the driver when the empty parking space near the location of interest is no longer available.
Unlike CO2 emissions observed on long road segments, CO2 emissions observed in an open parking lot are concentrated in a smaller geographical area. The total CO2 emissions observed in this study were for two hours of visitor parking time. A shopping center that has opening hours between 9:00 and 20:00 each day does not have a constant influx of visitors over the whole day. Instead, visitors would be categorized as high and low traffic, based on varying times. Therefore, reducing the amount of time to park would subsequently reduce CO2 emissions. The results observed in this study represent a small proportion of CO2 emissions observed in a whole day. For instance, the shopping center is open for 11 h, where 4 h represent visitor non-peak hours and the remaining 7 h represent visitor peak hours. Therefore, estimated CO2 emissions for a whole working day would be 37 kg, which is equivalent to 122 km driven by an average passenger vehicle in an area of 320 m. Therefore, it is vital to improve the design of the parking lot and deploy feasible parking information systems to reduce CO2 emissions.
6. Conclusions and Future Work
This study aims to estimate excess CO2 emissions from observed cruising of drivers searching for empty parking spaces. The use of a thermal camera helps to collect cruising data of multiple drivers based on time. Cruising trajectories are utilized to analyze the choice of parking space and excess cruising performed by drivers to reach an empty parking space. This study contributes to research by estimating the magnitude of CO2 emissions due to excess cruising in an open parking lot. Since parking lots occupy smaller geographical regions, CO2 emissions from these places are scarcely researched. However, hundreds of thousands of vehicles cruise every day in open parking lots and the accumulation of all these vehicles increases the environmental impact.
The study proposes a new CO2 estimation model which is suitable for smaller geographical regions, such as open parking lots. This CO2 model estimates emissions based on the time taken by the driver to reach an empty parking space. The proposed model can also be utilized to estimate emissions in other smaller geographical regions. Most drivers cruising for empty parking spaces near the location of interest are visible during visitor non-peak and peak hours. This preference for a parking space near the location of interest can lead to non-optimal cruising. However, to utilize the entire parking lot and reduce cruising, the time limit of the parking spaces near the location of interest can be reduced to 30 min or less. Reducing the time limit would make the parking spaces near the location of interest less attractive to at least some of the drivers. The design of the parking lot can also be modified to accommodate a greater number of parking spaces near the location of interest.
Most of the optimal cruising was found during visitor non-peak hours and the mean of optimal cruising was around 78 m. Whereas 90% of drivers who drove optimally to find an empty parking space was during visitor non-peak hours. Furthermore, 57% of drivers drove optimally during visitor peak hours. Non-optimal cruising was found to be low during visitor non-peak hours, as there were several available empty parking spaces. During visitor peak hours, non-optimal cruising and drivers who were unable to find empty parking spaces captured approximately 67% of the total cruising distance. This implies that non-optimal cruising increases with higher vehicle traffic and a limited number of available empty parking spaces. Similarly, during visitor non-peak hours, the average time taken to occupy an empty parking space was 23 s, while it took 43 s to occupy an empty parking space during visitor peak hours.
Parking spaces near the location of interest, in this case, a shopping center, were of higher demand compared to other spaces. When there were several empty parking spaces available, most drivers tended to park the vehicle near the location of interest, leading to the lower mean of WD, which is 79 m. However, the observed non-optimal driving during visitor non-peak hours might have occurred due to the choice of parking space. Similarly, drivers tend to cruise non-optimal distances while searching for empty parking spaces near the location of interest, before moving to further parking spaces during visitor peak hours. Therefore, the choice of parking space has an impact on CO2 emissions during visitor peak and non-peak hours.
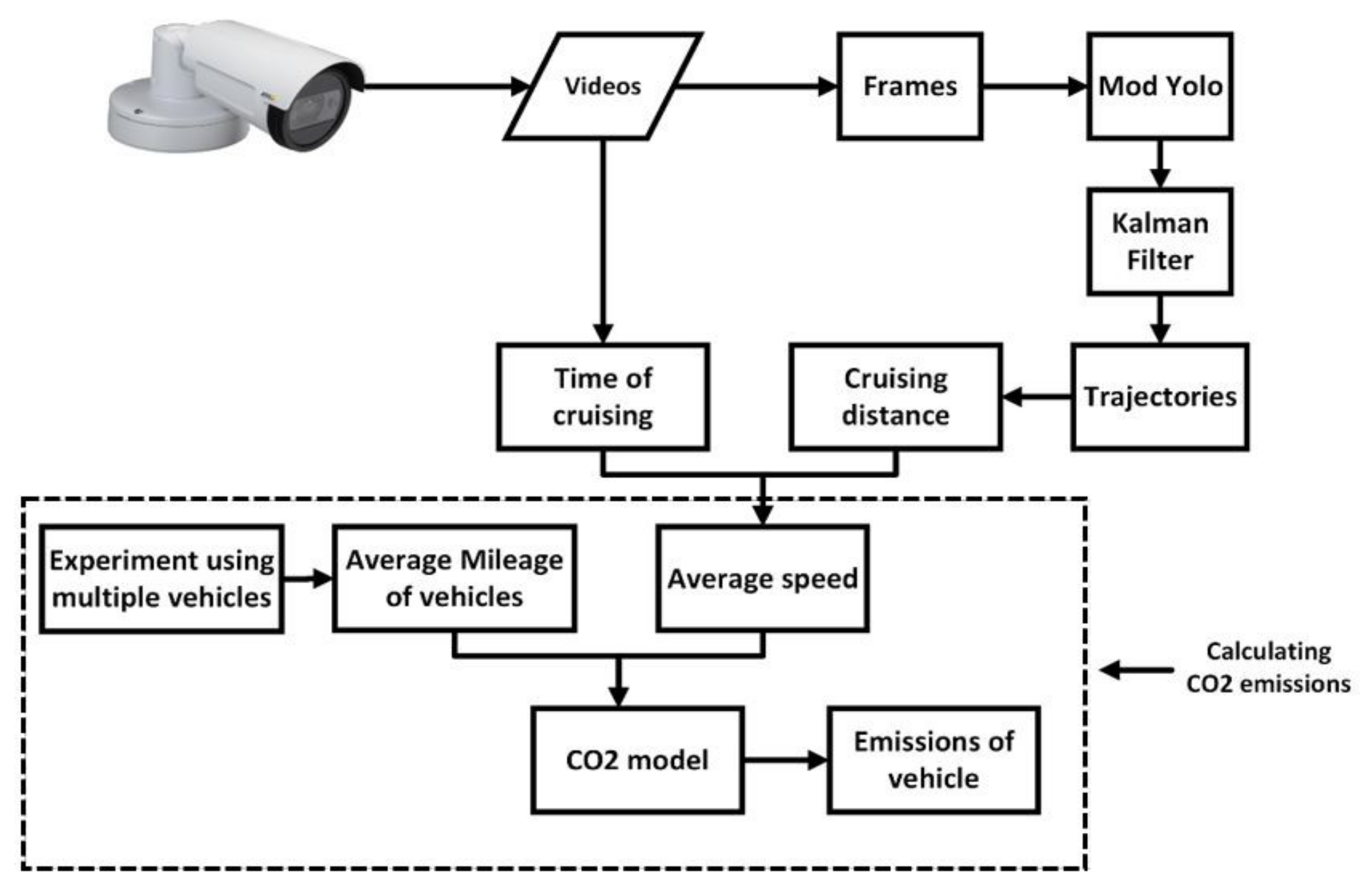
Cruising behavior was analyzed based on the availability of several, minimal, or no empty parking spaces. However, in the future, cruising data from the entire parking lot can be analyzed to understand the variability of CO2 emissions and cruising behavior based on time. CO2, or other harmful emissions, can be collected using external tools at several locations to evaluate their impact on the health of individuals walking in the parking lot. The use of Mod Yolov3 and Kalman filters generated the trajectories of vehicles in the parking lot. However, errors can be identified in maintaining data association using the Kalman filters. Nonetheless, sufficient data association was maintained to identify vehicle trajectory. In the future, the performance of tracking can be improved by utilizing an extended Kalman filter or particle filter.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}