1. Introduction
The high deployment of RESs, especially solar and wind systems, in modern power grids is a promising solution for the reduction of greenhouse gas emissions produced from traditional power generators [
1]. Despite their numerous economic and environmental benefits, the widespread integration of RESs lowers the overall inertia of power grids, which causes negative impacts on frequency stability [
2,
3], especially in the case of islanded microgrids.
A microgrid can be considered as a micro electric system with a group of RESs, small thermal generating units, energy storage units, and domestic loads, that can be operated in either a grid-connected mode or an islanded mode [
4,
5,
6]. In the grid-connected mode, the microgrid can receive power from both the utility grid and distributed generators (DGs). In this mode, most of the load consumed power is provided by the DGs in the microgrid, and the rest is supplied by the utility grid to meet actual fluctuations in power demand [
7]. On the other hand, in the islanded mode of operation, either load or generation shedding may be performed to maintain power balance [
8,
9]. In this regard, some studies have addressed the challenges of microgrid operations in terms of grid-connected mode [
10,
11] and islanded mode operation [
12,
13,
14,
15]. According to the previous studies, microgrid control is more demanding in islanded mode than in grid-connected mode, since the frequency and voltage are not supported by the utility grid [
16].
With the noticeable increased integration of power electronics-based RESs in microgrids, a shortage of system inertia appears, leading to possible frequency instability. Consequently, power electronics-based RESs generate high fluctuations in frequency compared with other conventional power plants [
17,
18,
19]. Hence, islanded microgrids might not be secure for high penetration levels of power electronics-based RESs.
Due to the aforementioned frequency stability issues, a new control concept called virtual synchronous generator (VSG) or virtual synchronous machine (VSM) was introduced to mimic the conventional generating machines’ behavior [
1,
20]. The virtual inertia control concept is considered a specific part of VSM operation, which depends on imitating the prime mover characteristics to provide the inertia power for the support of frequency stability [
21]. Virtual inertia control is provided by connecting energy storage systems (ESS) with the grid through inverters to provide damping and inertia characteristics of conventional machines to the grid. The control approach depends on measuring the rate of change of frequency (RCF), where the frequency change is calculated to provide the necessary power to the microgrid through ESS and, hence, enhance the frequency stability of the microgrid [
22].
In the past few years, numerous control strategies were utilized with virtual inertia control to enhance the microgrid frequency stability [
23,
24,
25,
26,
27,
28]. For example, the enhanced derivative technique was applied to a virtual inertia control model to mimic the damping and inertia properties for frequency stability support of the microgrid [
23,
24]. In [
25], a fuzzy logic control was implemented with a virtual inertia control loop for regulating the microgrid frequency. Robust virtual inertia control based on H-infinite control was proposed in [
26] for the enhancement of frequency stability in a microgrid with a high penetration level of RESs. In [
27], the coefficient diagram method was implemented in a virtual inertia control model to alleviate the frequency disturbances in islanded microgrids in case of contingencies. In [
28], a model predictive control was provided with virtual inertia control for microgrid frequency stabilization in the face of disturbances and system uncertainties. Though the aforementioned controllers have a decent performance when dealing with the system’s dynamics, they struggle with several drawbacks such as (i) their reliance on the designer’s knowledge to obtain the appropriate deign structure, (ii) their requirement of a long time for computation and operation, (iii) their complex design procedures, (iv) their higher cost compared with conventional controllers [
29]. Moreover, proportional integral derivative (PID) or PI controllers are the most commonly used to study the frequency regulation problem, since they provide many benefits such as a wide-ranging stability margin, simplicity in structure, and low cost. However, these controllers are sensitive to disturbances and system uncertainties (i.e., system parameters variations). Therefore, the optimal design of these controllers is considered a challenge in the face of disturbances and system uncertainties. Various heuristic optimization techniques such as particle swarm optimization (PSO) [
30], genetic algorithms (GA) [
31], and chicken swarm optimizer (CSO) [
32] were applied to optimally design these controllers and improve frequency stability. Though these techniques are used in solving various optimization problems [
30,
31,
32], they have a slow convergence rate during the iterative process, and it is difficult to achieve global optimal solutions dealing with high dimensional problems. On the other hand, the MRFO algorithm has proven its effectiveness in tackling challenging problems in terms of computational cost and solution precision. According to the previous observations, the continuous advance and great progress of optimization of revolutionary algorithms promotes the application of the MRFO algorithm to design optimal parameters of PI controllers within the virtual inertia control loop.
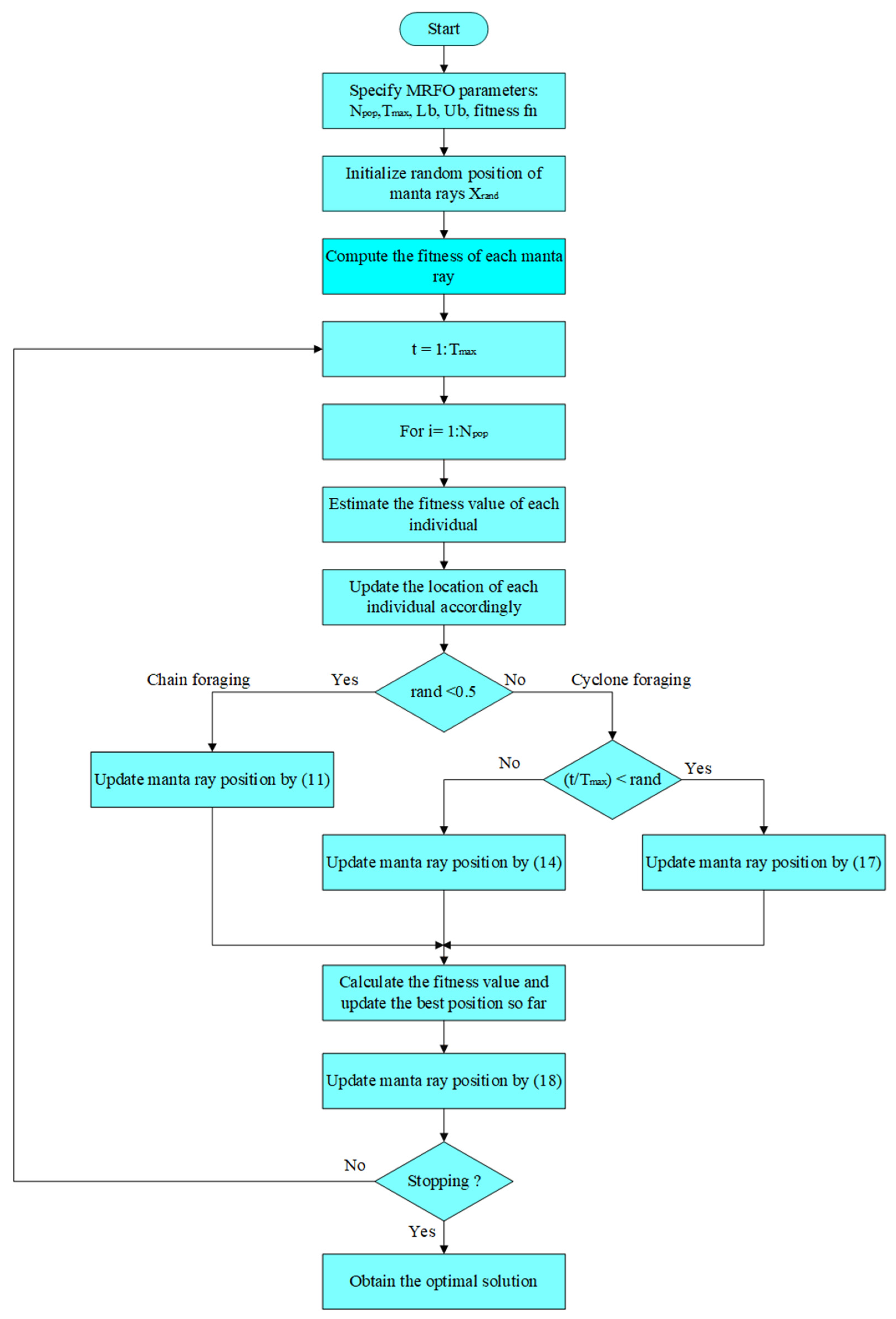
Manta ray foraging optimization (MRFO) is a new metaheuristic algorithm inspired by the foraging behaviors of manta rays. Manta rays have intelligent and different foraging strategies for finding plentiful plankton. These foraging strategies are chain, cyclone, and somersault foraging [
33]. MRFO is simple in execution and provides great potential for many applications in numerous designing engineering fields.
The research contributions obtained by using an MRFO-based PI controller in the virtual inertia control loop of islanded microgrid are the following:
- i.
The uncertainties in RESs and load powers were considered to check the performance of the microgrid under different operating conditions.
- ii.
Actual wind data from the Al-Zaafrana wind farm in Egypt were extracted and used, solar power data extracted from field tests and random load fluctuations were implemented to achieve the presented results.
- iii.
The wind, solar, and load data showed signs of partial and complete shedding, validating the effectiveness of the presented control approach under severe scenarios.
The optimization problem is defined using the criterion of integral square error (ISE), that is the most commonly utilized within the frequency control loops [
30]. The effectiveness of MRFO-based PI controller is compared with PSO-based and GA-based PI controllers. The performance of the proposed control approach is checked using the time domain simulations, that are performed using MATLAB software.
The remainder of the paper is organized as follows:
Section 2 describes the structure and dynamic modelling of the microgrid including virtual inertia control concept. The control approach and problem formulation are presented in
Section 3.
Section 4 describes the MRFO while
Section 5 presents the simulation results and discussion. Finally, the paper is concluded in
Section 6.
3. Virtual Inertia Control Based on a PI Controller
In traditional networks, the main source of inertia consists of the rotating elements in conventional generating units. Therefore, these generating units play a significant role in restricting the RCF. However, the overall microgrid inertia might be significantly reduced with a high integration of renewables. Therefore, RESs supported by power electronics negatively affect the microgrid frequency resilience. Hence, this will create working restrictions for a virtual inertia control device which cannot deliver sufficient frequency support in the face of contingencies and high RESs integration into the microgrid [
29]. Therefore, an additional reliable controller must be provided to deal with uncertainties and contingencies in a low-inertia system and reduce the frequency deviations in case of sudden disturbances or contingencies such as sudden generation loss or load shedding [
26,
38]. Regarding this issue, a PI controller is proposed to be added in loop to a virtual inertia controller model to emulate the inertia response in the microgrid, thus improving the frequency stability of the studied microgrid. Furthermore, the optimal tuning of the parameters of the PI controller was achieved using an MRFO algorithm under different operating conditions of the microgrid. The parameters of the PI controller are the proportional gain
and the integral gain
. Its transfer function is described as follows:
The MRFO was used to find the optimum design parameters for minimizing the system frequency deviation. In this study, the integral square error (ISE) criterion was used as the objective function to be minimized for optimum tuning of the parameters [
30,
39]. Therefore, the objective function of the optimization problem, depending on the ISE, can be formulated as follows:
the lower and upper limits of the controller parameters are 0 and 100, respectively;
is the frequency deviation, and
is the simulation time for one run.


 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}