1. Introduction
A tunnel in a rock mass is commonly constructed using the bored tunnel technique. There are conventional and mechanized methods that can be utilized in the construction depending on the dimensions of the tunnel and the characteristics of the rock mass. One of the conventional methods is to use blasting techniques for tunnel constructions in hard rock formations, where the issue of support is usually minor. On the other hand, tunnels may be constructed in weak rock formations by using mechanical excavators, in which case, heavy supports, such as shotcrete, anchors/bolts, and steel ribs, are required during the construction. In addition to the blasting and drilling methods, a tunnel boring machine (TBM) is an efficient technique for tunnel construction in rock masses. This TBM method can also be designed to excavate noncircular tunnels such as tunnels with square shapes. Commonly, an open-type TBM is used for tunnel construction in hard rock. For fractured rocks and highly broken rocks, a single-shield or double-shield TBM is widely utilized to ensure the safety of rock masses while constructing. To precisely evaluate the tunnel stability in rocks during tunnel construction, an effective failure criterion for capturing rock collapse is necessary.
The Hoek–Brown (HB) failure criterion was first created analytically in the 1980s by curve-fitting triaxial test data of whole and jointed rocks and is known as the original HB criterion 1980 (Hoek and Brown [
1]). Hoek et al. [
2] performed changes to the original version in an attempt to optimize the effect of the highly fractured property. This version from 2002 has now become the most famous HB failure criterion. Hoek gives a quick overview of the failure criteria’s origins and progress [
3,
4]. The HB failure criterion has a more intricate nonlinear expression than the linear Mohr–Coulomb failure criterion, most notably the reliance of rock mass shear strength on the nonlinearity of the minor principal compressive stress. In order to appropriately reflect the failure of jointed rock masses, the HB failure criteria require extra strength factors.
Although this HB failure criterion may be employed to correctly define the failure characteristics of diverse rock types, it has been used to examine multiple challenges in the area of rock engineering, such as subterranean entrances and caves (e.g., Carranza-Torres and Fairhurst [
5]; Carranza-Torres [
6]; Fraldi and Guarracino [
7]; Martin et al. [
8]; Sakurai [
9]; Senent et al. [
10]; Swift and Reddish [
11]; Yang and Huang [
12]; [
13]), bearing capacity and shaft resistance of foundations (e.g., AlKhafaji et al. [
14]; Chakraborty and Kumar [
15]; Clausen [
16]; Keshavarz and Kumarm [
17]; Merifield, et al. [
18]; Saada et al. [
19]; Serrano and Olalla [
20]; [
21]; Yodsomjai et al. [
22]; Keawsawasvong [
23]; Keawsawasvong et al. [
24]; [
25]; Yang and Yin [
26]), and stability analysis of rock slopes (Yodsomjai et al. [
27]; Deng et al. [
28]; Li et al. [
29]; [
30]; Shen and Karakus, [
31]; Shen et al. [
32]; Yang et al. [
33]; You et al. [
34]).
The finite element limit analysis (FELA) technique developed by Sloan [
35] is a strong tool for obtaining the required stability results. Plastic bounds theorems, finite element discretization, and nonlinear programming are all applied in this method. Following a completely plastic material with an associated flow rule, the relevant upper and lower bound theorems (UB and LB) are established. An exact solution should be able to be bracketed from both above (UB) and below (LB). The HB model was combined with the FELA (Kumar and Rahaman [
36]) to produce tunnel stability solutions to analyze the stability of unlined tunnels in rock masses. As a result, a number of prior studies have lately focused on tunnel stability in HB rock masses with different shapes. Keawsawasvong and Ukritchon [
37] investigated the stability of a single circular tunnel, whereas Ukritchon and Keawsawasvong [
38] and Xiao et al. [
39] investigated the stability of a single square tunnel and a single rectangular tunnel, respectively. Ukritchon and Keawsawasvong [
40] have explored the rock stability solutions for plane strain heading tunnels. Furthermore, Zhang et al. [
41] and Xiao et al. [
42] evaluated the stability of dual unlined circular and square tunnels, respectively.
The aforementioned studies relate to the use of FELA with the HB failure criterion to investigate the stability of tunnels that are located in rock masses. However, soft computing emerged as a viable alternative to the traditional analytic and numerical methodologies. An artificial neural network is a form of soft computing technology (ANN). This method can acquire from a large enough dataset employed to generate a black-box prediction model to utilize the results in the form of a closed simple equation. The ANN approach has been used to determine rock properties in the field of rock engineering (e.g., Gholami et al. [
43]; Mert et al. [
44]; Miah et al. [
45]; Mohamad Ali Ridho et al. [
46]; Ocak and Seker [
47]; Yang and Zhang [
48]; Keawsawaswong et al. [
49]). Alavi and Sadrossadat [
50], Millán et al. [
51], and Ziaee et al. [
52] applied the ANN approach to develop models for forecasting the consequences of problems with foundation bearing capacity on rock masses. Li et al. [
53] utilized the dataset acquired from FELA with the HB failure criterion to suggest the scheme for predicting stability solutions of rock slopes using an extreme learning neural network and a terminal steepest descent method. Recently, Naghadehi et al. [
54] have used the ANN approach to investigate the face stability of mechanized shield tunneling in cohesive-frictional soils. However, no prior research has used the ANN approach to examine the stability of tunnels in rock masses using FELA with the HB failure criterion. This research created a practical tool based on the ANN approach that can quickly evaluate tunnel stability for varied designs.
2. Problem Definition and Hoek–Brown Failure Criterion
The Hoek–Brown (HB) failure criteria (Hoek and Brown [
1]; Hoek et al. [
2]) is a well-known rock failure model that accounts for the minor principal (compressive) stress’s nonlinearity. The HB failure criterion is expressed mathematically as a power-law relationship between the major and minor principal stresses (i.e.,
σ1 and
σ3). Considering tensile normal stresses as a positive parameter, the HB failure criterion is as follows:
where
σci is the uniaxial compressive strength of intact rock mass while
mb,
s, and
a are expressed in Equations (2)–(4).
The geological strength index (GSI) usually ranges from 10 to 100 (from a heavily damaged rock mass to a completely undamaged rock mass). The degree of disturbance is denoted by DF, which normally runs between 0 and 1 (in situ rock masses that have not been disturbed to in situ rock masses that have been severely disrupted). The value of mi is normally between 5 and 35. This is a constant that is proportional to the frictional strength of an entire rock mass.
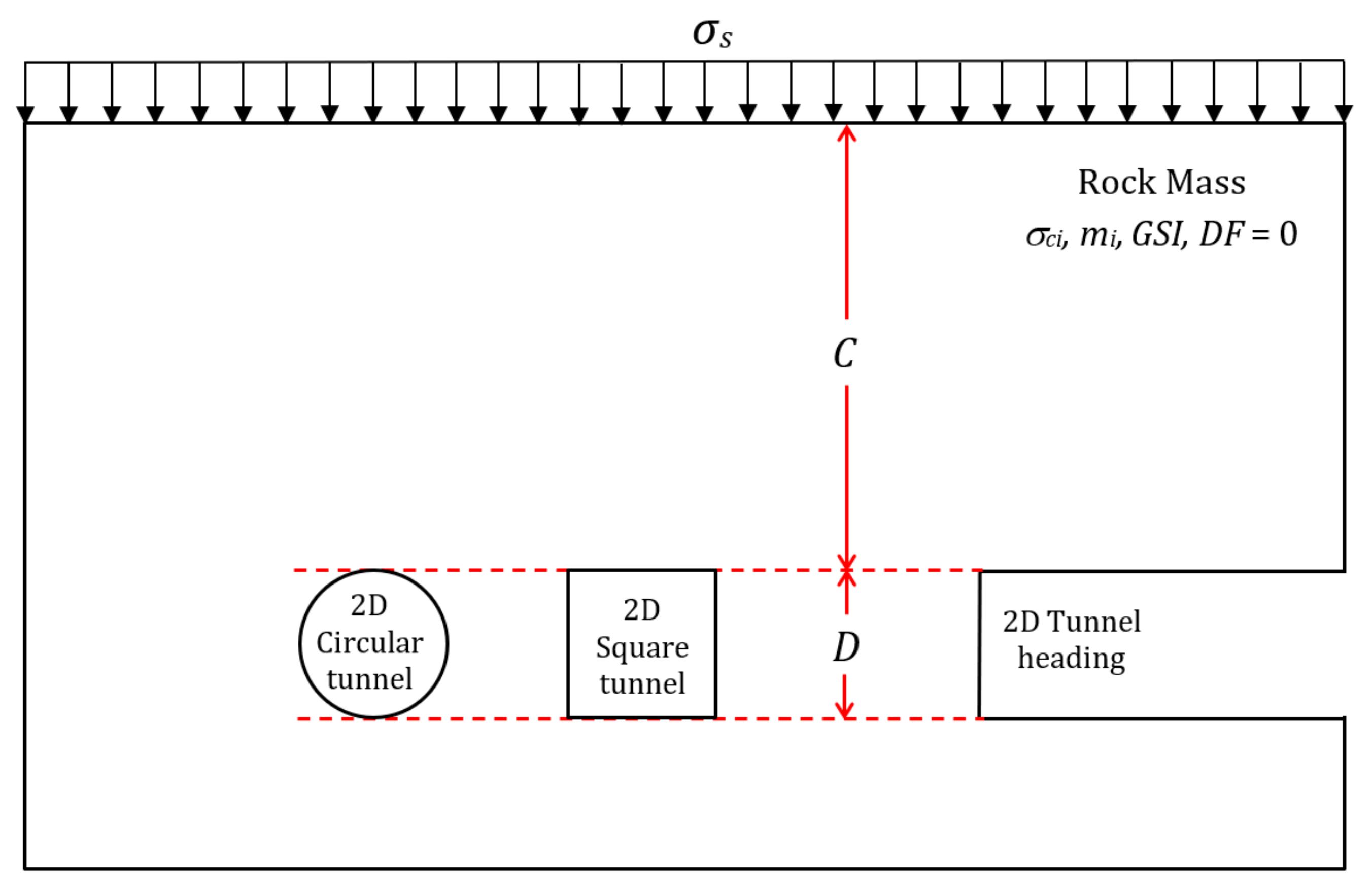
Figure 1 shows three different 2D unlined tunnels under a plane strain condition, namely the circular, the square, and the tunnel heading. In this study, since a plane strain condition is assumed, the assumption for the circular and the square tunnels is that the problem represents a very long unlined tunnel. The 2D tunnel heading problem is treated as a longwall mining problem with an infinitely long flat wall. The tunnels have a diameter (
D) and a cover depth (
C) above the crown. The rock mass has a unit weight of
γ, and at the surface area of rock masses, a uniform surcharge pressure at collapse (
σs) is applied over the area. It is hypothesized that there is no disturbance in the surrounding rock mass during tunnel excavation and the undisturbed in situ condition is applicable to the HB model with the disturbance factor
DF = 0. For the problem of dual unlined circular and square tunnels, the center-to-center distance between the tunnels is defined as
S, as shown in
Figure 2.
According to the above-mentioned parameters, seven design parameters were considered in this study (i.e.,
C,
D,
S,
σci,
GSI,
mi,
γ). Using the dimensionless output parameter (
σs/σci), where
σs is the uniform surcharge at collapse. Equation (5) represents the stability factor (
σs/σci) as a function of five dimensionless parameters.
where
S/D is the distance ratio;
C/D is the cover-depth ratio;
γD/σci is the normalized unit weight ratio;
GSI is the geological strength index;
mi is the frictional strength of intact rock; and
σs/σci is the stability factor. It should be noted that, for the tunnel heading problem, the distance ratio
S/D was not taken into account. It is noted that the training datasets were collected from the FELA solutions derived from previously published works. The aim of this study is to develop a nonlinear input–output mapping employing an extreme machine learning approach to develop a neural network model for a system of tunnels in rock masses.
5. Conclusions
This paper aims to develop a machine-learning-aided prediction model for the stability factor of the tunnels located in a rock mass considering three different types of tunnels: heading tunnel, dual square tunnels, and dual circular tunnels. The stability factor is investigated in terms of five dimensionless parameters including the cover-depth ratio, the distance ratio, the geological strength index, the normalized uniaxial compressive strength, and the mi parameter. The best ANN models for estimating the stability factor of heading, dual square, and dual circular tunnels are presented in this article. Notably, just one hidden layer is required to construct a high-performance neural network model, since the R2 is high and the MSE is very low, indicating that the proposed model may be used to reliably determine the stability factor. The neural network constants namely, weight and bias, are obtained in this study for each tunnel. The neural network models are constructed and recommended to be used to efficiently estimate the stability factor of a tunnel placed inside a rock mass. However, the suggested neural network models are not recommended to be used if the parameter values fall beyond the specified ranges in this research. It should be noted that the proposed scheme can be extended to apply to the problems of tunnel stability in soils with the Mohr–Coulomb failure criterion by using similar ANN models. However, the input strength parameters of rocks (e.g., GSI, mi, and σci) must be changed to those of soils (e.g., cohesion, c, and friction angle, ϕ). The problems of tunnel stability in soils with the use of ANN models will be the subject of future studies.



 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}