
A Review of Load Frequency Control Schemes Deployed for Wind-Integrated Power Systems



Abstract
:1. Introduction
1.1. Background
1.2. Literature Review
1.3. Objectives and Contributions
- The impact of wind power on the frequency stability of interconnected power systems has been reviewed.
- The pros and cons of various wind-integrated power system models, as well as their influence on LFC, have been examined.
- The application and shortcomings of the most commonly employed control techniques for wind-integrated power systems have been investigated.
- The use of soft computing approaches to LFC models that can manage uncertainties and parameter variations in varied load disturbances has been outlined.
- Analysis of research gaps and future recommendations for LFC in wind-integrated power systems has been undertaken.
2. Review of the Load Frequency Control Scheme
2.1. LFC Scheme Considering Conventional Power Systems
2.2. LFC Scheme Considering Wind-Integrated Power Systems
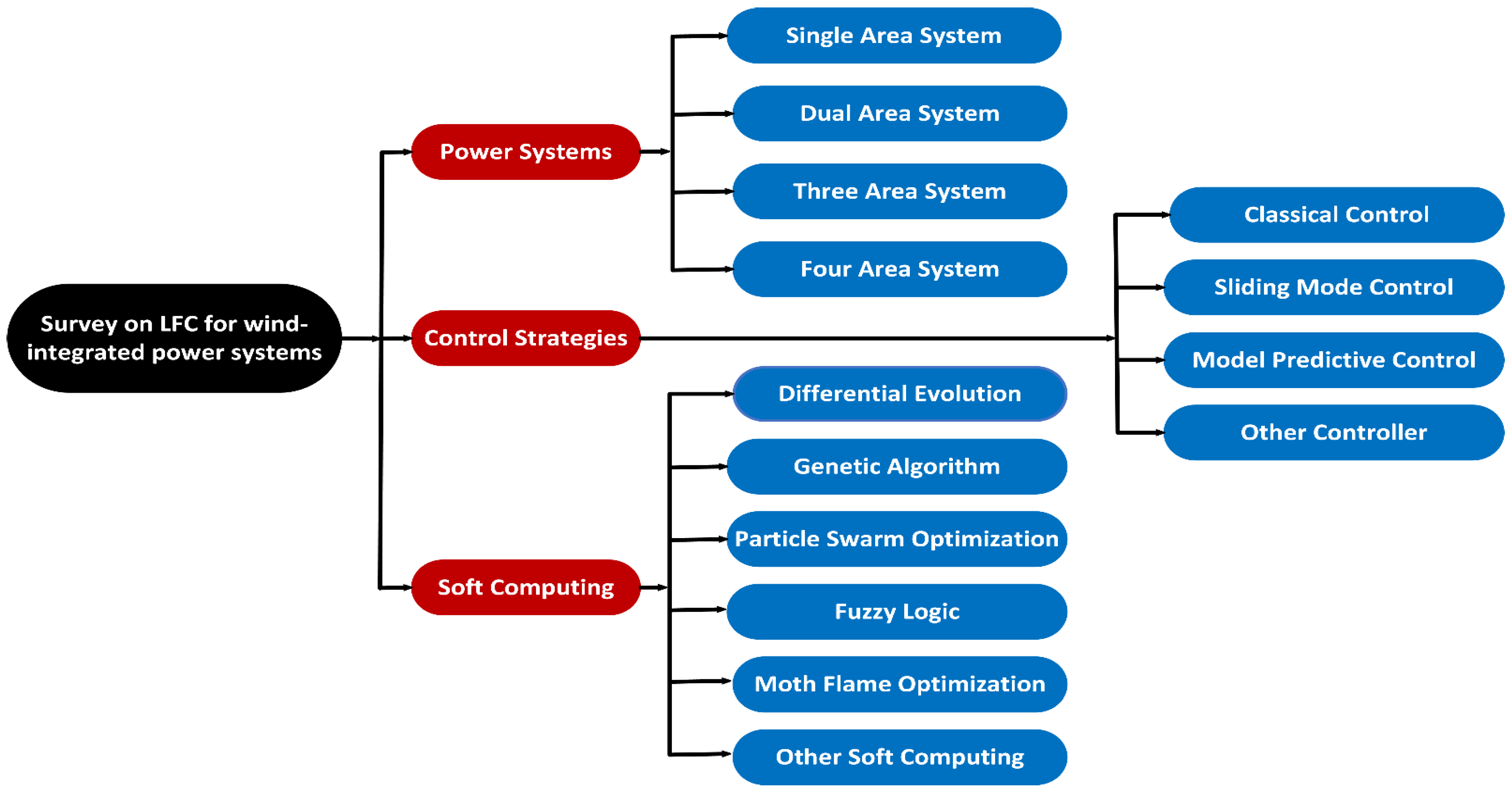
3. Taxonomy of LFC Based on the Types of Power Systems
3.1. Single-Area Wind-Integrated Power System
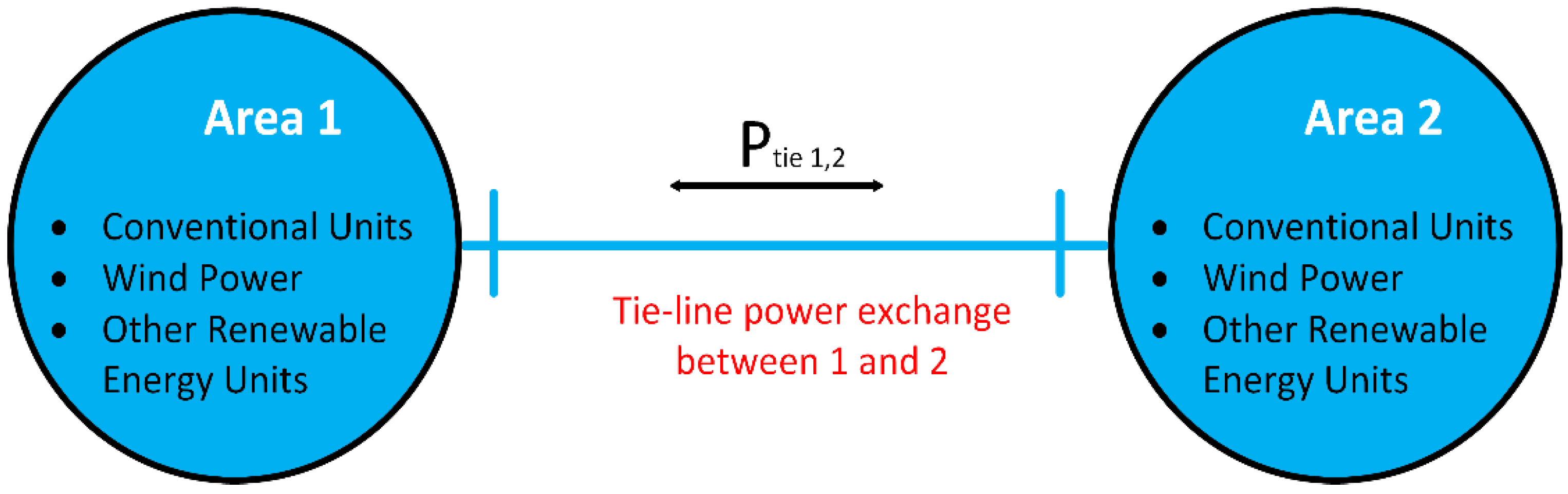
3.2. Dual-Area Wind-Integrated Power System
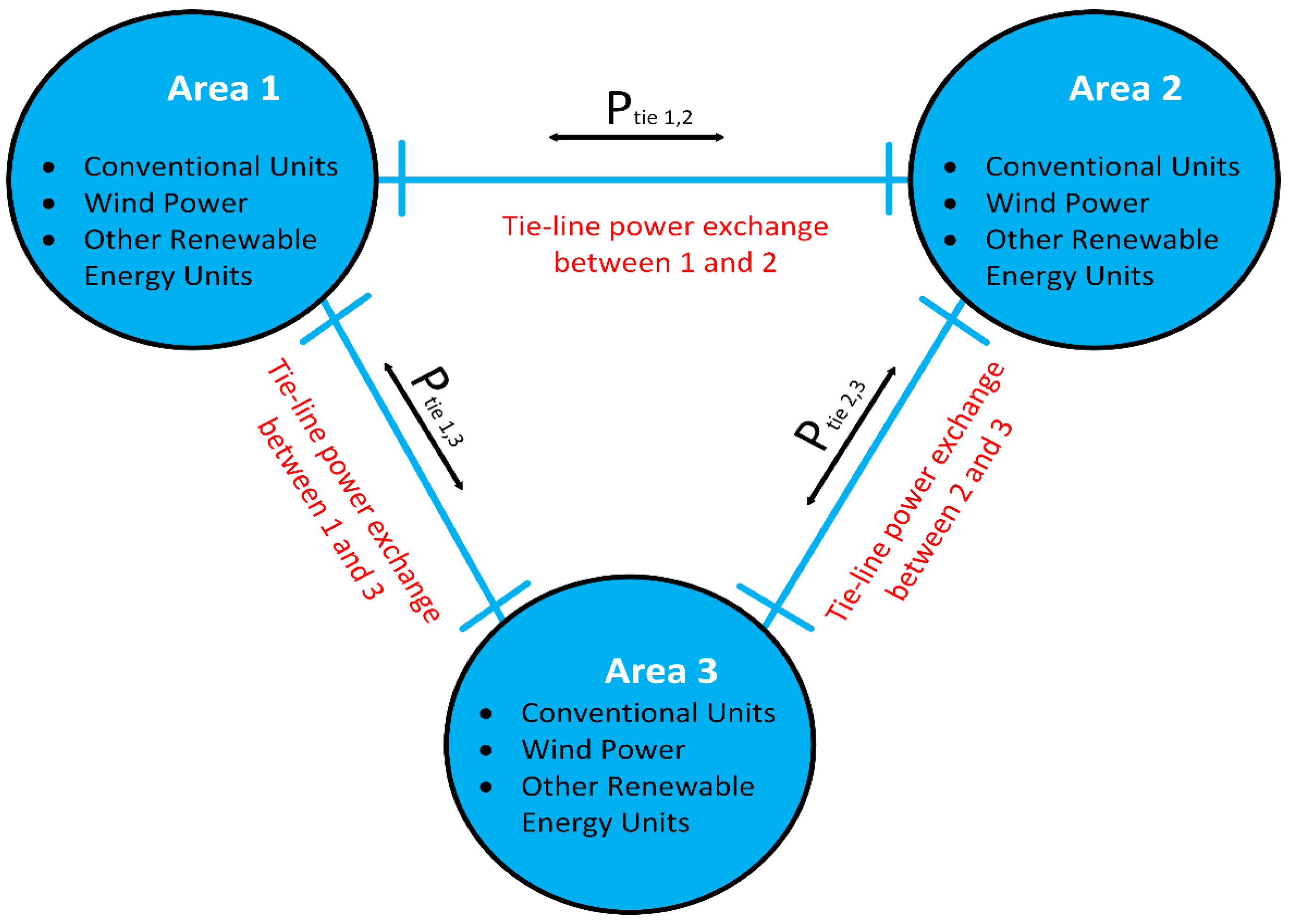
3.3. Three-Area Wind-Integrated Power System
3.4. Four-Area Wind-Integrated Power System
4. Taxonomy of LFCs Based on Various Control Strategies
4.1. Classical Control Techniques
4.2. Sliding Mode Control Techniques
4.3. Model Predictive Control Techniques
4.4. Similar Designed and Deployed Controllers

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controllers | Advantages | Disadvantages | Applications | References |
|---|---|---|---|---|
| Model predictive control |
|
|
| [82,83,84,85] |
| Sliding mode control |
|
|
| [85,86,87,88] |
| Classical |
|
|
| [85,89,90] |
| Cascaded Control |
|
|
| [91,92,93] |
5. Using Soft Computing to Implement Control Techniques
5.1. Differential Evolution Technique
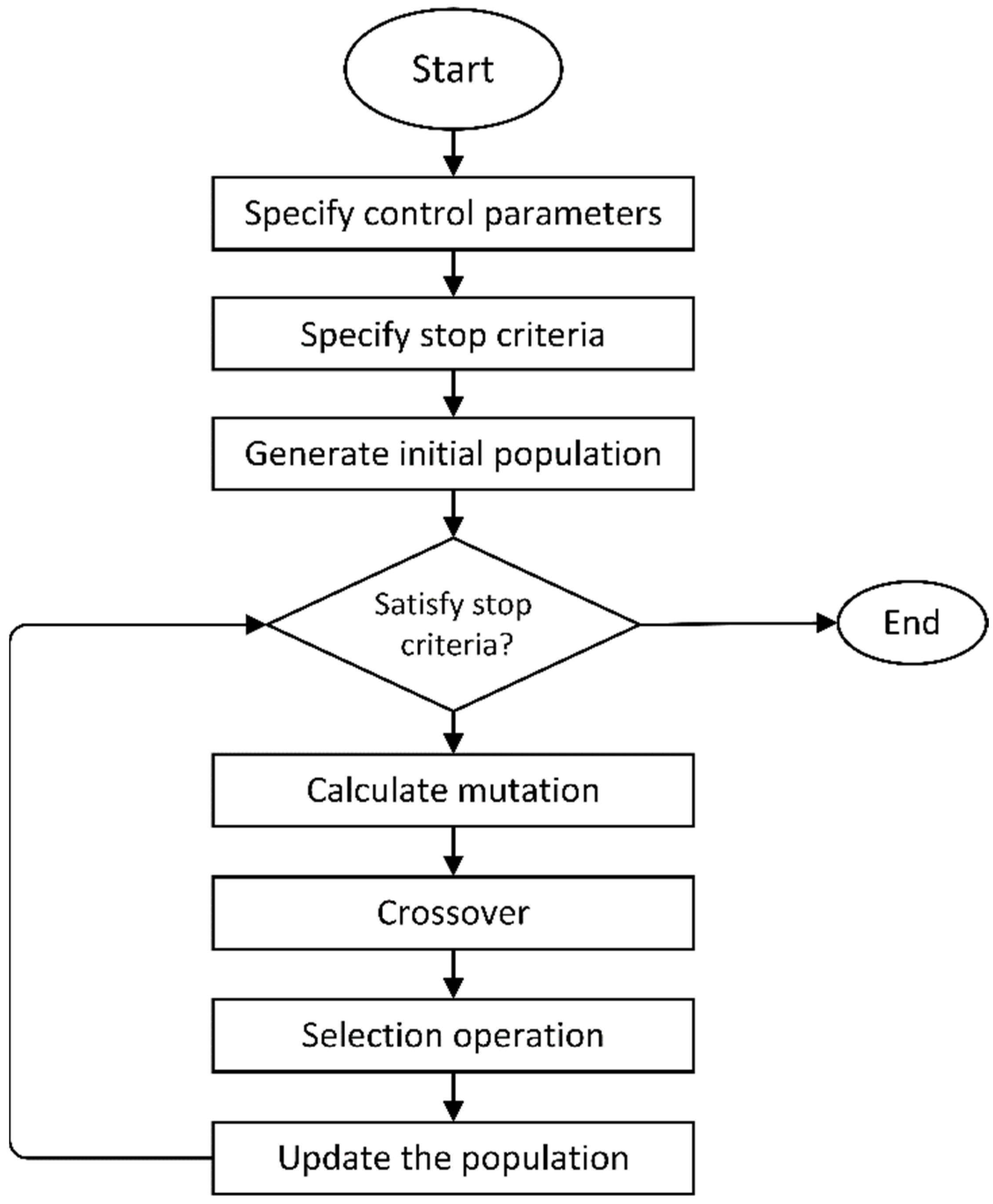
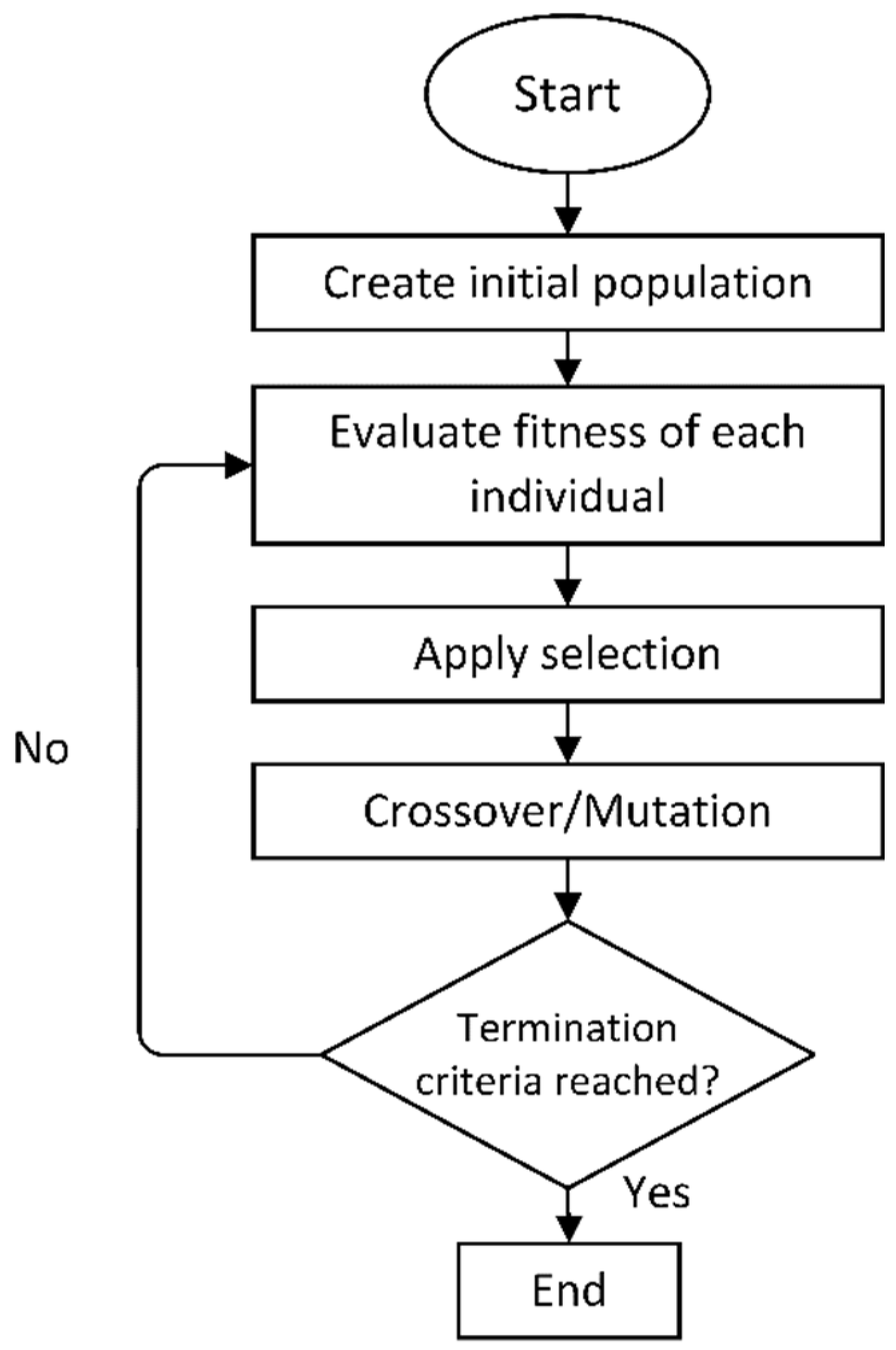
5.2. Genetic Algorithm Technique
5.3. Particle Swarm Algorithmic Technique
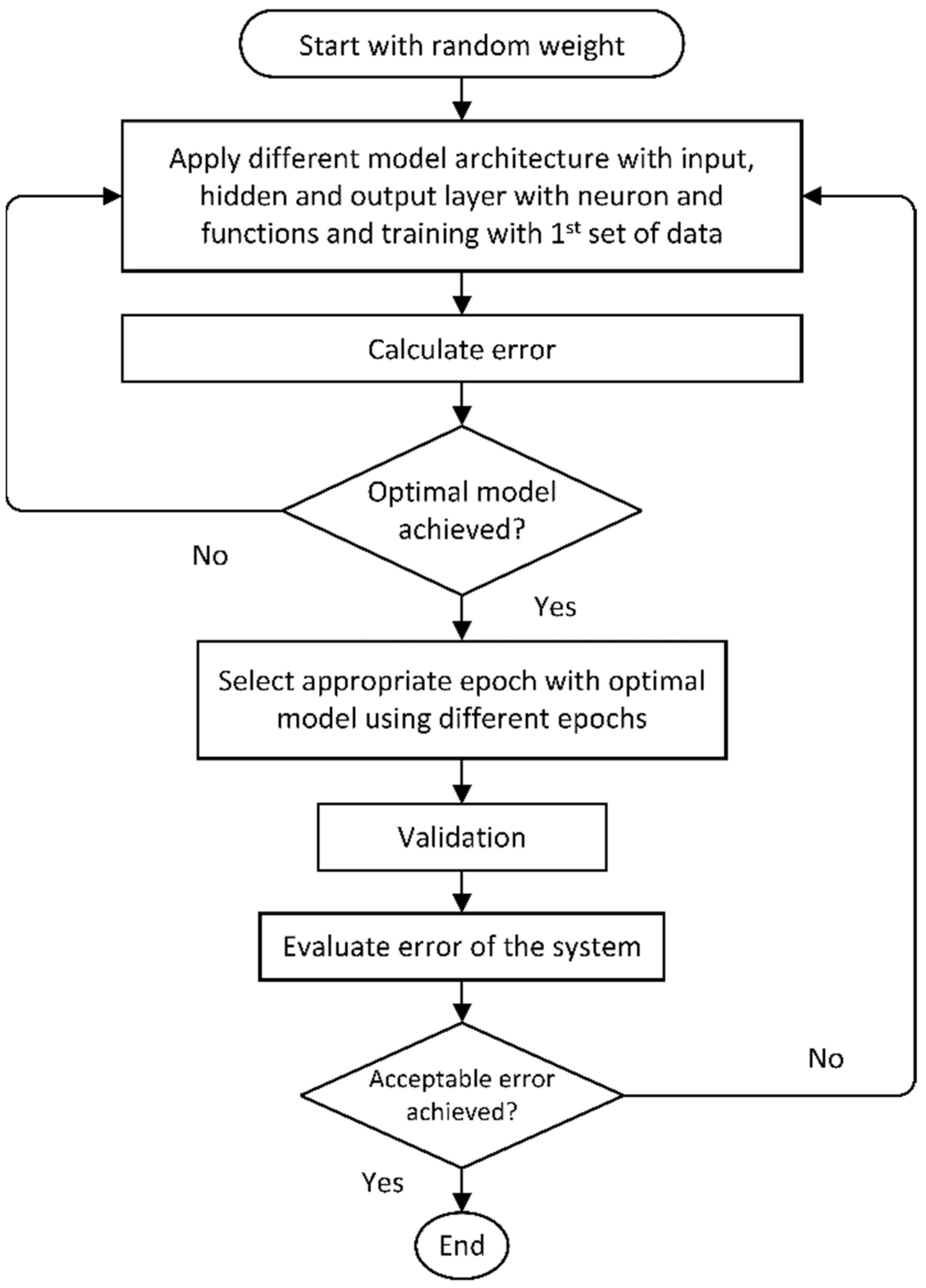
5.4. Artificial Intelligence (AI) Control Techniques
5.5. Fuzzy Logic Approach
5.6. Moth-Flame Optimization Technique
5.7. Other Soft Computing Approaches
6. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Asghar, R.; Ullah, Z.; Azeem, B.; Aslam, S.; Hashmi, M.H.; Rasool, E.; Shaker, B.; Anwar, M.J.; Mustafa, K. Wind Energy Potential in Pakistan: A Feasibility Study in Sindh Province. Energies 2022, 15, 8333. [Google Scholar] [CrossRef]
- Li, J.; Wang, G.; Li, Z.; Yang, S.; Chong, W.T.; Xiang, X. A Review on Development of Offshore Wind Energy Conversion System. Int. J. Energy Res. 2020, 44, 9283–9297. [Google Scholar] [CrossRef]
- REN21. Renewables 2021 Global Status Report. Available online: https://www.ren21.net/wp-content/uploads/2019/05/GSR2021_Full_Report.pdf (accessed on 21 October 2022).
- International Energy. AGENCY Net Zero by 2050 A Roadmap for the Global Energy Sector. Available online: https://iea.blob.core.windows.net/assets/deebef5d-0c34-4539-9d0c-10b13d840027/NetZeroby2050-ARoadmapfortheGlobalEnergySector_CORR.pdf (accessed on 21 October 2022).
- Pahasa, J.; Ngamroo, I. Coordinated Control of Wind Turbine Blade Pitch Angle and PHEVs Using MPCs for Load Frequency Control of Microgrid. IEEE Syst. J. 2016, 10, 97–105. [Google Scholar] [CrossRef]
- Ratnam, K.S.; Palanisamy, K.; Yang, G. Future Low-Inertia Power Systems: Requirements, Issues, and Solutions—A Review. Renew. Sustain. Energy Rev. 2020, 124, 109773. [Google Scholar] [CrossRef]
- Yan, Z.; Xu, Y. Data-Driven Load Frequency Control for Stochastic Power Systems: A Deep Reinforcement Learning Method with Continuous Action Search. IEEE Trans. Power Syst. 2019, 34, 1653–1656. [Google Scholar] [CrossRef]
- Singh, B.; Slowik, A.; Bishnoi, S.K. A Dual-Stage Controller for Frequency Regulation in a Two-Area Realistic Diverse Hybrid Power System Using Bull–Lion Optimization. Energies 2022, 15, 8063. [Google Scholar] [CrossRef]
- Jood, P.; Aggarwal, S.K.; Chopra, V. Performance Assessment of a Neuro-Fuzzy Load Frequency Controller in the Presence of System Non-Linearities and Renewable Penetration. Comput. Electr. Eng. 2019, 74, 362–378. [Google Scholar] [CrossRef]
- Dreidy, M.; Mokhlis, H.; Mekhilef, S. Inertia Response and Frequency Control Techniques for Renewable Energy Sources: A Review. Renew. Sustain. Energy Rev. 2017, 69, 144–155. [Google Scholar] [CrossRef]
- Ochoa, D.; Martinez, S. Frequency Dependent Strategy for Mitigating Wind Power Fluctuations of a Doubly-Fed Induction Generator Wind Turbine Based on Virtual Inertia Control and Blade Pitch Angle Regulation. Renew. Energy 2018, 128, 108–124. [Google Scholar] [CrossRef]
- Guo, S.F.; Zhang, J.T.; Asaah, P.; Hao, L.L.; Ji, J. A Review of Wind Turbine Deloaded Operationtechniques for Primary Frequency Control in Power System. In Proceedings of the 2018 China International Conference on Electricity Distribution (CICED), Tianjin, China, 17–19 September 2018; pp. 63–71. [Google Scholar] [CrossRef]
- Abouzeid, S.I.; Guo, Y.; Zhang, H.C. Coordinated Control of the Conventional Units, Wind Power, and Battery Energy Storage System for Effective Support in the Frequency Regulation Service. Int. Trans. Electr. Energy Syst. 2019, 29, e2845. [Google Scholar] [CrossRef]
- Hazari, M.R.; Jahan, E.; Mannan, M.A.; Tamura, J. Coordinated Control Scheme of Battery Storage System to Augment LVRT Capability of SCIG-Based Wind Turbines and Frequency Regulation of Hybrid Power System. Electronics 2020, 9, 239. [Google Scholar] [CrossRef]
- Barra, P.H.A.; de Carvalho, W.C.; Menezes, T.S.; Fernandes, R.A.S.; Coury, D.V. A Review on Wind Power Smoothing Using High-Power Energy Storage Systems. Renew. Sustain. Energy Rev. 2021, 137, 110455. [Google Scholar] [CrossRef]
- Ahmed, E.M.; Mohamed, E.A.; Elmelegi, A.; Aly, M.; Elbaksawi, O. Optimum Modified Fractional Order Controller for Future Electric Vehicles and Renewable Energy-Based Interconnected Power Systems. IEEE Access 2021, 9, 29993–30010. [Google Scholar] [CrossRef]
- Bibak, B.; Tekiner-Moğulkoç, H. A Comprehensive Analysis of Vehicle to Grid (V2G) Systems and Scholarly Literature on the Application of Such Systems. Renew. Energy Focus 2021, 36, 1–20. [Google Scholar] [CrossRef]
- Gonzalez Venegas, F.; Petit, M.; Perez, Y. Active Integration of Electric Vehicles into Distribution Grids: Barriers and Frameworks for Flexibility Services. Renew. Sustain. Energy Rev. 2021, 145, 111060. [Google Scholar] [CrossRef]
- Khamies, M.; Magdy, G.; Kamel, S.; Khan, B. Optimal Model Predictive and Linear Quadratic Gaussian Control for Frequency Stability of Power Systems Considering Wind Energy. IEEE Access 2021, 9, 116453–116474. [Google Scholar] [CrossRef]
- Yadav, P.K.; Bhasker, R.; Upadhyay, S.K. Comparative Study of ANFIS Fuzzy Logic and Neural Network Scheduling Based Load Frequency Control for Two-Area Hydro Thermal System. Mater. Today Proc. 2021, 56, 3042–3050. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, S.; Zhao, Q. Distributed Economic MPC for LFC of Multi-Area Power System with Wind Power Plants in Power Market Environment. Int. J. Electr. Power Energy Syst. 2021, 126, 106548. [Google Scholar] [CrossRef]
- Khan, M.; Sun, H.; Xiang, Y.; Shi, D. Electric Vehicles Participation in Load Frequency Control Based on Mixed H2/H∞. Int. J. Electr. Power Energy Syst. 2021, 125, 106420. [Google Scholar] [CrossRef]
- Dhundhara, S.; Verma, Y.P. Grid Frequency Enhancement Using Coordinated Action of Wind Unit with Redox Flow Battery in a Deregulated Electricity Market. Int. Trans. Electr. Energy Syst. 2020, 30, e12189. [Google Scholar] [CrossRef]
- Ebrahim, M.A.; Becherif, M.; Abdelaziz, A.Y. Dynamic Performance Enhancement for Wind Energy Conversion System Using Moth-Flame Optimization Based Blade Pitch Controller. Sustain. Energy Technol. Assess. 2018, 27, 206–212. [Google Scholar] [CrossRef]
- Jalali, N.; Razmi, H.; Doagou-Mojarrad, H. Optimized Fuzzy Self-Tuning PID Controller Design Based on Tribe-DE Optimization Algorithm and Rule Weight Adjustment Method for Load Frequency Control of Interconnected Multi-Area Power Systems. Appl. Soft Comput. 2020, 93, 106424. [Google Scholar] [CrossRef]
- Sharma, G.; Panwar, A.; Arya, Y.; Kumawat, M. Integrating Layered Recurrent ANN with Robust Control Strategy for Diverse Operating Conditions of AGC of the Power System. IET Gener. Transm. Distrib. 2020, 14, 3886–3895. [Google Scholar] [CrossRef]
- Annamraju, A.; Nandiraju, S. Robust Frequency Control in a Renewable Penetrated Power System: An Adaptive Fractional Order-Fuzzy Approach. Prot. Control Mod. Power Syst. 2019, 4, 16. [Google Scholar] [CrossRef]
- Lv, X.; Sun, Y.; Wang, Y.; Dinavahi, V. Adaptive Event-Triggered Load Frequency Control of Multi-Area Power Systems under Networked Environment via Sliding Mode Control. IEEE Access 2020, 8, 86585–86594. [Google Scholar] [CrossRef]
- Vo, A.T.; Kang, H.J.; Le, T.D. An Adaptive Fuzzy Terminal Sliding Mode Control Methodology for Uncertain Nonlinear Second-Order Systems. In Proceedings of the 14th International Conference, ICIC 2018, Wuhan, China, 15–18 August 2018; pp. 123–135. [Google Scholar] [CrossRef]
- Borrelli, F.; Bemporad, A.; Morari, M. Predictive Control for Linear and Hybrid Systems; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar] [CrossRef]
- Wu, C.; Gao, S.; Liu, Y.; Song, T.E.; Han, H. A Model Predictive Control Approach in Microgrid Considering Multi-Uncertainty of Electric Vehicles. Renew. Energy 2021, 163, 1385–1396. [Google Scholar] [CrossRef]
- Mohamed, M.A.; Diab, A.A.Z.; Rezk, H.; Jin, T. A Novel Adaptive Model Predictive Controller for Load Frequency Control of Power Systems Integrated with DFIG Wind Turbines. Neural Comput. Appl. 2020, 32, 7171–7181. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, Y.; Lee, K.Y. Robust Distributed MPC for Load Frequency Control of Uncertain Power Systems. Control Eng. Pract. 2016, 56, 136–147. [Google Scholar] [CrossRef]
- Oshnoei, A.; Kheradmandi, M.; Muyeen, S.M. Robust Control Scheme for Distributed Battery Energy Storage Systems in Load Frequency Control. IEEE Trans. Power Syst. 2020, 35, 4781–4791. [Google Scholar] [CrossRef]
- Jain, S.K.; Chakrabarti, S.; Singh, S.N. Review of Load Frequency Control Methods, Part-I: Introduction and Pre-Deregulation Scenario. In Proceedings of the 2013 International Conference on Control, Automation, Robotics and Embedded Systems (CARE), Jabalpur, India, 16–18 December 2013. [Google Scholar] [CrossRef]
- Pappachen, A.; Peer Fathima, A. Critical Research Areas on Load Frequency Control Issues in a Deregulated Power System: A State-of-the-Art-of-Review. Renew. Sustain. Energy Rev. 2017, 72, 163–177. [Google Scholar] [CrossRef]
- Pandey, S.K.; Mohanty, S.R.; Kishor, N. A Literature Survey on Load–Frequency Control for Conventional and Distribution Generation Power Systems. Renew. Sustain. Energy Rev. 2013, 25, 318–334. [Google Scholar] [CrossRef]
- Prakash, A.; Kumar, K.; Parida, S.K. PIDF(1+FOD) Controller for Load Frequency Control with Sssc and Ac-Dc Tie-Line in Deregulated Environment. IET Gener. Transm. Distrib. 2020, 14, 2751–2762. [Google Scholar] [CrossRef]
- Prakash, A.; Kumar, K.; Parida, S.K. A Novel I-PDF Controller for LFC with AC/DC Tie-Line. In Proceedings of the 2019 20th International Conference on Intelligent System Application to Power Systems (ISAP), New Delhi, India, 10–14 December 2019. [Google Scholar] [CrossRef]
- Imam, A.M.; Chaudhary, K.; Kunya, A.B.; Rizvi, Z.; Ali, J. Impact of Communication Delay on Distributed Load Frequency Control (Dis-LFC) in Multi-Area Power System (MAPS). Malays. J. Fundam. Appl. Sci. 2019, 15, 626–632. [Google Scholar] [CrossRef]
- Asghar, R.; Ali, A.; Rehman, F.; Ullah, R.; Ullah, K.; Ullah, Z.; Sarwar, M.A.; Khan, B. Load Frequency Control for EVs Based Smart Grid System Using PID and MPC. In Proceedings of the 2020 3rd International Conference on Computing, Mathematics and Engineering Technologies (iCoMET), Sukkur, Pakistan, 29–30 January 2020. [Google Scholar] [CrossRef]
- Haes Alhelou, H.; Hamedani-Golshan, M.E.; Zamani, R.; Heydarian-Forushani, E.; Siano, P. Challenges and Opportunities of Load Frequency Control in Conventional, Modern and Future Smart Power Systems: A Comprehensive Review. Energies 2018, 11, 2497. [Google Scholar] [CrossRef]
- Mikulčić, H.; Baleta, J.; Klemeš, J.J.; Wang, X. Energy Transition and the Role of System Integration of the Energy, Water and Environmental Systems. J. Clean. Prod. 2021, 292, 126027. [Google Scholar] [CrossRef]
- Fouladi, E.; Baghaee, H.R.; Bagheri, M.; Gharehpetian, G.B. Power Management of Microgrids Including PHEVs Based on Maximum Employment of Renewable Energy Resources. IEEE Trans. Ind. Appl. 2020, 56, 5299–5307. [Google Scholar] [CrossRef]
- Al Kez, D.; Foley, A.M.; McIlwaine, N.; Morrow, D.J.; Hayes, B.P.; Zehir, M.A.; Mehigan, L.; Papari, B.; Edrington, C.S.; Baran, M. A Critical Evaluation of Grid Stability and Codes, Energy Storage and Smart Loads in Power Systems with Wind Generation. Energy 2020, 205, 117671. [Google Scholar] [CrossRef]
- Aziz, A.; Oo, A.T.; Stojcevski, A. Analysis of Frequency Sensitive Wind Plant Penetration Effect on Load Frequency Control of Hybrid Power System. Int. J. Electr. Power Energy Syst. 2018, 99, 603–617. [Google Scholar] [CrossRef]
- Gulzar, M.M.; Iqbal, M.; Shahzad, S.; Muqeet, H.A.; Shahzad, M.; Hussain, M.M. Load Frequency Control (LFC) Strategies in Renewable Energy-Based Hybrid Power Systems: A Review. Energies 2022, 15, 3488. [Google Scholar] [CrossRef]
- Guo, J. Application of Full Order Sliding Mode Control Based on Different Areas Power System with Load Frequency Control. ISA Trans. 2019, 92, 23–34. [Google Scholar] [CrossRef]
- Uyioghosa, I.E.; Saha, A.K. DMPC Scheme for Load Frequency Control with Application to Interconnected Power System. In Proceedings of the 2020 International SAUPEC/RobMech/PRASA Conference, Cape Town, South Africa, 29–31 January 2020. [Google Scholar] [CrossRef]
- Naga Sai Kalyan, C.H.; Srikanth Goud, B.; Rami Reddy, C.; Bajaj, M.; Sharma, N.K.; Alhelou, H.H.; Siano, P.; Kamel, S. Comparative Performance Assessment of Different Energy Storage Devices in Combined LFC and AVR Analysis of Multi-Area Power System. Energies 2022, 15, 629. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, Y.; Lee, K.Y. Coordinated Distributed MPC for Load Frequency Control of Power System with Wind Farms. IEEE Trans. Ind. Electron. 2017, 64, 5140–5150. [Google Scholar] [CrossRef]
- Dhillon, S.S.; Lather, J.S.; Marwaha, S. Multi Objective Load Frequency Control Using Hybrid Bacterial Foraging and Particle Swarm Optimized PI Controller. Int. J. Electr. Power Energy Syst. 2016, 79, 196–209. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, X.; Qu, B. Distributed Model Predictive Load Frequency Control of Multi-Area Power System with DFIGs. IEEE/CAA J. Autom. Sin. 2017, 4, 125–135. [Google Scholar] [CrossRef]
- Dahiya, P.; Sharma, V.; Naresh, R. Optimal Sliding Mode Control for Frequency Regulation in Deregulated Power Systems with DFIG-Based Wind Turbine and TCSC–SMES. Neural Comput. Appl. 2019, 31, 3039–3056. [Google Scholar] [CrossRef]
- Osman, S.O.; Rahim, A.; Mustafa, S.P.; Nawari, O. Load Frequency Control for a Two Area Power System; University of Khartoum: Al Khurtum, Sudan, 2017. [Google Scholar]
- Aung, S.S.; Htike, Z.M. Modeling and Simulation of Load Frequency Control for Three Area Power System Using Proportional Integral Derivative (PID) Controller. Am. Acad. Sci. Res. J. Eng. Technol. Sci. 2016, 26, 301–315. [Google Scholar]
- Oshnoei, A.; Kheradmandi, M.; Muyeen, S.M.; Hatziargyriou, N.D. Disturbance Observer and Tube-Based Model Predictive Controlled Electric Vehicles for Frequency Regulation of an Isolated Power Grid. IEEE Trans. Smart Grid 2021, 12, 4351–4362. [Google Scholar] [CrossRef]
- Tumino, P. Frequency Control in a Power System-Technical Articles. Available online: https://eepower.com/technical-articles/frequency-control-in-a-power-system/# (accessed on 15 October 2020).
- Alhelou, H.H.; Siano, P.; Tipaldi, M.; Iervolino, R.; Mahfoud, F. Primary Frequency Response Improvement in Interconnected Power Systems Using Electric Vehicle Virtual Power Plants. World Electr. Veh. J. 2020, 11, 40. [Google Scholar] [CrossRef]
- Bektache, A.; Boukhezzar, B. Nonlinear Predictive Control of a DFIG-Based Wind Turbine for Power Capture Optimization. Int. J. Electr. Power Energy Syst. 2018, 101, 92–102. [Google Scholar] [CrossRef]
- Lei, W.; Li, C.; Chen, M.Z.Q. Robust Adaptive Tracking Control for Quadrotors by Combining PI and Self-Tuning Regulator. IEEE Trans. Control Syst. Technol. 2019, 27, 2663–2671. [Google Scholar] [CrossRef]
- Mishra, S.; Nayak, P.C.; Prusty, U.C.; Prusty, R.C. Model Predictive Controller Based Load Frequency Control of Isolated Microgrid System Integrated to Plugged-in Electric Vehicle. In Proceedings of the 2021 1st Odisha International Conference on Electrical Power Engineering, Communication and Computing Technology (ODICON), Bhubaneswar, India, 8–9 January 2021. [Google Scholar] [CrossRef]
- Elsaied, M.M.; Attia, M.A.; Abdelhamed, M.; Said, M.; Mekhamer, F.; Mostafa, M.A.; Mekhamer, S.F. Application of Different Optimization Techniques to Load Frequency Control with WECS in a Multi-Area System. Electr. Power Compon. Syst. 2018, 46, 739–756. [Google Scholar] [CrossRef]
- Kumar, A.; Shankar, R. A Quasi Opposition Lion Optimization Algorithm for Deregulated AGC Considering Hybrid Energy Storage System. J. Electr. Eng. Technol. 2021, 16, 2995–3015. [Google Scholar] [CrossRef]
- Vedik, B.; Kumar, R.; Deshmukh, R.; Verma, S.; Shiva, C.K. Renewable Energy-Based Load Frequency Stabilization of Interconnected Power Systems Using Quasi-Oppositional Dragonfly Algorithm. J. Control Autom. Electr. Syst. 2020, 32, 227–243. [Google Scholar] [CrossRef]
- Guo, J. Application of a Novel Adaptive Sliding Mode Control Method to the Load Frequency Control. Eur. J. Control 2021, 57, 172–178. [Google Scholar] [CrossRef]
- Delassi, A.; Arif, S.; Mokrani, L. Load Frequency Control Problem in Interconnected Power Systems Using Robust Fractional PIλD Controller. Ain Shams Eng. J. 2018, 9, 77–88. [Google Scholar] [CrossRef]
- Das, S.; Saikia, L.C.; Datta, S. Maiden Application of TIDN-(1+PI) Cascade Controller in LFC of a Multi-Area Hydro-Thermal System Incorporating EV–Archimedes Wave Energy-Geothermal-Wind Generations under Deregulated Scenario. Int. Trans. Electr. Energy Syst. 2021, 31, e12907. [Google Scholar] [CrossRef]
- Khooban, M.H.; Niknam, T. A New Intelligent Online Fuzzy Tuning Approach for Multi-Area Load Frequency Control: Self Adaptive Modified Bat Algorithm. Int. J. Electr. Power Energy Syst. 2015, 71, 254–261. [Google Scholar] [CrossRef]
- Shayeghi, H.; Rahnama, A.; Mohajery, R.; Bizon, N.; Mazare, A.G.; Ionescu, L.M. Multi-Area Microgrid Load-Frequency Control Using Combined Fractional and Integer Order Master–Slave Controller Considering Electric Vehicle Aggregator Effects. Electronics 2022, 11, 3440. [Google Scholar] [CrossRef]
- Kumar, A.; Anwar, M.N.; Kumar, S. Sliding Mode Controller Design for Frequency Regulation in an Interconnected Power System. Prot. Control Mod. Power Syst. 2021, 6, 6. [Google Scholar] [CrossRef]
- Mudi, J.; Shiva, C.K.; Mukherjee, V. Multi-Verse Optimization Algorithm for LFC of Power System with Imposed Nonlinearities Using Three-Degree-of-Freedom PID Controller. Iran. J. Sci. Technol. Trans. Electr. Eng. 2019, 43, 837–856. [Google Scholar] [CrossRef]
- Memon, S.; Kalhoro, A.N. Design of Multivariable PID Controllers: A Comparative Study. Int. J. Comput. Sci. Netw. Secur. 2021, 21, 11–18. [Google Scholar] [CrossRef]
- Khamari, D.; Sahu, R.K.; Panda, S. Moth Swarm Algorithm Based Cascade PI-PD Controller for Frequency Regulation of Distributed Power Generation System with Electric Vehicle. In Proceedings of the 2020 First International Conference on Power, Control and Computing Technologies (ICPC2T), Raipur, India, 3–5 January 2020; pp. 16–20. [Google Scholar] [CrossRef]
- Asghar, R.; Rehman, F.; Ullah, Z.; Aman, A.; Iqbal, K.; Nawaz, A.A. Modified Switch Type Fault Current Limiter for Low-Voltage Ride-through Enhancement and Reactive Power Support of DFIG-WT under Grid Faults. IET Renew. Power Gener. 2020, 14, 1481–1490. [Google Scholar] [CrossRef]
- Sami, I.; Khan, B.; Asghar, R.; Mehmood, C.A.; Ali, S.M.; Ullah, Z.; Basit, A. Sliding Mode-Based Model Predictive Torque Control of Induction Machine. In Proceedings of the 2019 International Conference on Engineering and Emerging Technologies (ICEET), Lahore, Pakistan, 21–22 February 2019. [Google Scholar] [CrossRef]
- Abubakr, H.; Guerrero, J.M.; Vasquez, J.C.; Mohamed, T.H.; Mahmoud, K.; Darwish, M.M.F.; Dahab, Y.A. Adaptive LFC Incorporating Modified Virtual Rotor to Regulate Frequency and Tie-Line Power Flow in Multi-Area Microgrids. IEEE Access 2022, 10, 33248–33268. [Google Scholar] [CrossRef]
- Vafamand, N.; Arefi, M.M.; Asemani, M.H.; Dragicevic, T. Decentralized Robust Disturbance-Observer Based LFC of Interconnected Systems. IEEE Trans. Ind. Electron. 2022, 69, 4814–4823. [Google Scholar] [CrossRef]
- Yan, W.; Sheng, L.; Xu, D.; Yang, W.; Liu, Q. H∞ Robust Load Frequency Control for Multi-Area Interconnected Power System with Hybrid Energy Storage System. Appl. Sci. 2018, 8, 1748. [Google Scholar] [CrossRef]
- Farooq, Z.; Rahman, A.; Lone, S.A. Load Frequency Control of Multi-Source Electrical Power System Integrated with Solar-Thermal and Electric Vehicle. Int. Trans. Electr. Energy Syst. 2021, 31, e12918. [Google Scholar] [CrossRef]
- Kumari, S.; Shankar, G. Maiden Application of Cascade Tilt-Integral-Derivative Controller in Load Frequency Control of Deregulated Power System. Int. Trans. Electr. Energy Syst. 2020, 30, e12257. [Google Scholar] [CrossRef]
- Anderson, B.; Bennick, A.; Salciccioli, M. 12.3: MIMO Using Model Predictive Control-Engineering LibreTexts. Available online: https://eng.libretexts.org/Bookshelves/Industrial_and_Systems_Engineering/Chemical_Process_Dynamics_and_Controls_(Woolf)/12%3A_Multiple_Input_Multiple_Output_(MIMO)_Control/12.03%3A_MIMO_using_model_predictive_control (accessed on 23 November 2022).
- Ding, Y.; Wang, L.; Li, Y.; Li, D. Model Predictive Control and Its Application in Agriculture: A Review. Comput. Electron. Agric. 2018, 151, 104–117. [Google Scholar] [CrossRef]
- Ekaputri, C.; Syaichu-Rohman, A. Model Predictive Control (MPC) Design and Implementation Using Algorithm-3 on Board SPARTAN 6 FPGA SP605 Evaluation Kit. In Proceedings of the 2013 3rd International Conference on Instrumentation Control and Automation (ICA), Ungasan, Indonesia, 28–30 August 2013; pp. 115–120. [Google Scholar] [CrossRef]
- Behrooz, F.; Mariun, N.; Marhaban, M.H.; Radzi, M.A.M.; Ramli, A.R. Review of Control Techniques for HVAC Systems—Nonlinearity Approaches Based on Fuzzy Cognitive Maps. Energies 2018, 11, 495. [Google Scholar] [CrossRef]
- Báez, X.; Defaz, F.; Leica, P.; Camacho, O. Application of a Sliding Mode Controller to a Cooling Tower. Rev. Técnica la Fac. Ing. Univ. del Zulia 2018, 41, 15–24. [Google Scholar]
- Komurcugil, H.; Biricik, S.; Bayhan, S.; Zhang, Z. Sliding Mode Control: Overview of Its Applications in Power Converters. IEEE Ind. Electron. Mag. 2021, 15, 40–49. [Google Scholar] [CrossRef]
- Xu, Z.; Huang, W.; Li, Z.; Hu, L.; Lu, P. Nonlinear Nonsingular Fast Terminal Sliding Mode Control Using Deep Deterministic Policy Gradient. Appl. Sci. 2021, 11, 4685. [Google Scholar] [CrossRef]
- Pfeiffer, C.F.; Skeie, N.-O.; Perera, D.W.U. Control of Temperature and Energy Consumption in Buildings—A Review. Int. J. Energy Environ. 2014, 5, 2076–2909. [Google Scholar]
- Song, Y.; Wu, S.; Yan, Y.Y. Control Strategies for Indoor Environment Quality and Energy Efficiency—A Review. Int. J. Low-Carbon Technol. 2015, 10, 305–312. [Google Scholar] [CrossRef]
- Sivaranjith Cascade Control Loop Working, Application, Avantages|Instrumentation and Control Engineering. Available online: https://automationforum.co/cascade-control-loop-working-application-avantages/ (accessed on 23 November 2022).
- ahshamseldin Cascade Pid Controllers. Available online: https://www.slideshare.net/ahshamseldin/cascade-pid-controllers (accessed on 23 November 2022).
- Raja, G.L.; Ali, A. Series Cascade Control: An Outline Survey. In Proceedings of the 2017 Indian Control Conference (ICC), Guwahati, India, 4–6 January 2017; pp. 409–414. [Google Scholar] [CrossRef]
- Yenduri, G.; Gadekallu, T.R. A Systematic Literature Review of Soft Computing Techniques for Software Maintainability Prediction: State-of-the-Art, Challenges and Future Directions. arXiv 2022, arXiv:2209.10131. [Google Scholar] [CrossRef]
- Latif, A.; Hussain, S.M.S.; Das, D.C.; Ustun, T.S. State-of-the-Art of Controllers and Soft Computing Techniques for Regulated Load Frequency Management of Single/Multi-Area Traditional and Renewable Energy Based Power Systems. Appl. Energy 2020, 266, 114858. [Google Scholar] [CrossRef]
- Pandey, S.K.; Pandey, V.; Tiwari, S.; Mohanty, S.R.; Singh, V.P. Load Frequency Control of Hybrid Power System Using Soft Computing Approach. In Computing Algorithms with Applications in Engineering, Proceedings of the ICCAEEE 2019, Sonbhadra, India, 30–31 August 2019; Springer: Berlin/Heidelberg, Germany, 2020; pp. 429–438. [Google Scholar] [CrossRef]
- Kalyan, C.N.S.; Suresh, C.V. Differential Evolution Based Intelligent Control Approach for LFC of Multiarea Power System with Communication Time Delays. In Proceedings of the 2021 International Conference on Computing, Communication, and Intelligent Systems (ICCCIS), Greater Noida, India, 19–20 February 2021; pp. 868–873. [Google Scholar] [CrossRef]
- Zamee, M.A.; Islam, K.K.; Ahmed, A.; Zafreen, K.R. Differential Evolution Algorithm Based Load Frequency Control in a Two-Area Conventional and Renewable Energy Based Nonlinear Power System. In Proceedings of the 2016 4th International Conference on the Development in the in Renewable Energy Technology (ICDRET), Dhaka, Bangladesh, 7–9 January 2016. [Google Scholar] [CrossRef]
- Chen, M.; Xiao, J.; Wang, X. Load Frequency Control of Two-Region Power System Based on Differential Evolution Algorithm. Int. Core J. Eng. 2021, 7, 403–409. [Google Scholar] [CrossRef]
- Osinski, C.; Leandro, G.V.; da Costa Oliveira, G.H. A New Hybrid Load Frequency Control Strategy Combining Fuzzy Sets and Differential Evolution. J. Control Autom. Electr. Syst. 2021, 32, 1627–1638. [Google Scholar] [CrossRef]
- Eltaeib, T.; Mahmood, A. Differential Evolution: A Survey and Analysis. Appl. Sci. 2018, 8, 1945. [Google Scholar] [CrossRef]
- Anuradhika, K.; Dash, P. Genetic Algorithm-Based Load Frequency Control of a Grid-Connected Microgrid in Presence of Electric Vehicles. In Sustainable Energy and Technological Advancements, Proceedings of the ISSETA 2021, Shillong, India, 24–25 September 2021; Springer: Singapore, 2022; pp. 435–447. [Google Scholar] [CrossRef]
- Cam, E.; Gorel, G.; Mamur, H.; Bernal-Agustín, J.L.; Dufo-López, R. Use of the Genetic Algorithm-Based Fuzzy Logic Controller for Load-Frequency Control in a Two Area Interconnected Power System. Appl. Sci. 2017, 7, 308. [Google Scholar] [CrossRef]
- Huang, Z.; Chen, Z.; Zheng, Y.; Sun, M.; Sun, Q. Optimal Design of Load Frequency Active Disturbance Rejection Control via Double-Chains Quantum Genetic Algorithm. Neural Comput. Appl. 2021, 33, 3325–3345. [Google Scholar] [CrossRef]
- Hassanat, A.; Almohammadi, K.; Alkafaween, E.; Abunawas, E.; Hammouri, A.; Prasath, V.B.S. Choosing Mutation and Crossover Ratios for Genetic Algorithms—A Review with a New Dynamic Approach. Information 2019, 10, 390. [Google Scholar] [CrossRef]
- Lu, H.; Chen, J.; Guo, L. 5.7 Energy Quality Management. Compr. Energy Syst. 2018, 5, 258–314. [Google Scholar] [CrossRef]
- Sami, I.; Ali, S.M.; Asghar, R.; Khan, I.; Abid, M.A.; Ullah, Z.; Khan, B.; Mehmood, C.A. Linear and Nonlinear Control Schemes for Smart Grid. In Proceedings of the 2019 International Conference on Electrical, Communication, and Computer Engineering (ICECCE), Swat, Pakistan, 24–25 July 2019. [Google Scholar] [CrossRef]
- Cheng, P.C.; Peng, B.R.; Liu, Y.H.; Cheng, Y.S.; Huang, J.W. Optimization of a Fuzzy-Logic-Control-Based MPPT Algorithm Using the Particle Swarm Optimization Technique. Energies 2015, 8, 5338–5360. [Google Scholar] [CrossRef]
- Han, S.-H.; Kim, K.W.; Kim, S.; Youn, Y.C. Artificial Neural Network: Understanding the Basic Concepts without Mathematics. Dement. Neurocognitive Disord. 2018, 17, 83–89. [Google Scholar] [CrossRef]
- Abiodun, O.I.; Jantan, A.; Omolara, A.E.; Dada, K.V.; Mohamed, N.A.E.; Arshad, H. State-of-the-Art in Artificial Neural Network Applications: A Survey. Heliyon 2018, 4, e00938. [Google Scholar] [CrossRef]
- Kumar, P.K.A.; Uthirasamy, R.; Saravanan, G.; Ibrahim, A.M. AGC Performance Enhancement Using ANN. In Proceedings of the 2016 2nd International Conference on Contemporary Computing and Informatics (IC3I), Greater Noida, India, 14–17 December 2016; pp. 452–456. [Google Scholar] [CrossRef]
- Chang, Y.K.; Mahmud, M.S.; Shin, J.; Nguyen-Quang, T.; Price, G.W.; Prithiviraj, B. Comparison of Image Texture Based Supervised Learning Classifiers for Strawberry Powdery Mildew Detection. AgriEngineering 2019, 1, 32. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, J.; Han, D.; Wu, H.; Zhou, R. Fuzzy-Logic Based Distributed Energy-Efficient Clustering Algorithm for Wireless Sensor Networks. Sensors 2017, 17, 1554. [Google Scholar] [CrossRef]
- Li, Y.; Zhu, X.; Liu, J. An Improved Moth-Flame Optimization Algorithm for Engineering Problems. Symmetry 2020, 12, 1234. [Google Scholar] [CrossRef]
- Mohamed, A.A.; Kamel, S.; Hassan, M.H.; Mosaad, M.I.; Aljohani, M. Optimal Power Flow Analysis Based on Hybrid Gradient-Based Optimizer with Moth–Flame Optimization Algorithm Considering Optimal Placement and Sizing of FACTS/Wind Power. Mathematics 2022, 10, 361. [Google Scholar] [CrossRef]
- Sahu, A.; Hota, S.K. Performance Comparison of 2-DOF PID Controller Based on Moth-Flame Optimization Technique for Load Frequency Control of Diverse Energy Source Interconnected Power System. In Proceedings of the 2018 Technologies for Smart-City Energy Security and Power (ICSESP), Bhubaneswar, India, 28–30 March 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Nandi, M.; Shiva, C.K.; Mukherjee, V. Moth-Flame Algorithm for TCSC- and SMES-Based Controller Design in Automatic Generation Control of a Two-Area Multi-Unit Hydro-Power System. Iran. J. Sci. Technol. Trans. Electr. Eng. 2019, 44, 1173–1196. [Google Scholar] [CrossRef]
- Abazari, A.; Monsef, H.; Wu, B. Coordination Strategies of Distributed Energy Resources Including FESS, DEG, FC and WTG in Load Frequency Control (LFC) Scheme of Hybrid Isolated Micro-Grid. Int. J. Electr. Power Energy Syst. 2019, 109, 535–547. [Google Scholar] [CrossRef]
- Mohammadikia, R.; Aliasghary, M. A Fractional Order Fuzzy PID for Load Frequency Control of Four-Area Interconnected Power System Using Biogeography-Based Optimization. Int. Trans. Electr. Energy Syst. 2019, 29, e2735. [Google Scholar] [CrossRef]
- Sahoo, D.K.; Sahu, R.K.; Sekhar, G.T.C.; Panda, S. A Novel Modified Differential Evolution Algorithm Optimized Fuzzy Proportional Integral Derivative Controller for Load Frequency Control with Thyristor Controlled Series Compensator. J. Electr. Syst. Inf. Technol. 2018, 5, 944–963. [Google Scholar] [CrossRef]
- Rezk, H.; Mohamed, M.A.; Diab, A.Z.; Kanagaraj, N. Load Frequency Control of Multi-Interconnected Renewable Energy Plants Using Multi-Verse Optimizer. Comput. Syst. Sci. Eng. 2021, 37, 219–231. [Google Scholar] [CrossRef]




| References | Power System Types | Source of Generation | Controller Types | Soft Computing | Advantages | Disadvantages |
|---|---|---|---|---|---|---|
| [5] | Hybrid | Thermal, WTs, PHEV | MPC | - | Robust to parameter variations | Excludes short-term frequency stabilization |
| [7] | Hybrid | Steam, WTs, Generators | Deep reinforcement learning | - | Faster response speed, System dynamics adaptability | Incorporate offline training of agents, Heavy communication burdens |
| [11] | Hybrid | Thermal, WTs, | Pitch angle frequency control | - | Smooth WTG output power, Used less equipment | Force unsafe turbine operation, Increasing the WTG’s energy costs |
| [13] | Hybrid | Thermal, Gas units, Hydraulic, WTs, BSS | Centralized integral controller | - | Effective at all wind speeds, Robust to non-linearities | Costly for large power system operation |
| [14] | Hybrid | Thermal, Hydro, WTs, BSS | PI cascade | - | Reduce frequency fluctuations, Ensuring the reactive and active power adjustment | Non-linearities and WTG penetration levels are not considered |
| [16] | Hybrid | Thermal, Hydro, Solar, WTs, EV | FOPID, TID | Artificial ecosystem optimization | Increased robustness, Enhanced system stability for parameter uncertainty, Fast response during transients | Cross-area power balance is difficult to accomplish, Unable to dampen large fluctuations |
| [19] | Hybrid | Thermal, Wind | MPC, LQG | Chimp optimization algorithm | Robustness to system non-linearities and uncertainties, Support high wind power penetration | - |
| [20] | Hybrid | Hydro, Thermal | ANFIS | Fuzzy and Neural | Improves dynamic response, Reduces fault magnitudes, and lower transitory frequency | WTG penetration and its impact on LFC are ignored |
| [22] | Conventional | Thermal, EVs | H2/H∞ | Linear matrix inequalities | Robustness to load fluctuation and parameter uncertainties | WTG penetration and its impact on LFC are ignored, Lacks peak-hour voltage transient or other constraints support |
| [24] | Hybrid | Thermal, WTs | PID | MFO | Adaptable to local and large-scale uncertainty | Load disturbances and system non-linearity reduce efficiency |
| [25] | Conventional | Thermal, Hydro, Gas | Fuzzy-PID | Tribe-DE | Excellent transient behavior, Resilience to disturbance, Robust to parameter variations | WTG penetration and its impact on LFC are ignored, MFs and criterion selection have certain limitations |
| [27] | Hybrid | Thermal, Hydro, PHEV | FO-fuzzy-PID | Teaching–learning based optimization | Good response to systems uncertainties and parameter variations | Not considered WTGs for LFC, MFs and baseline rules, might reduce the controller’s transient performance |
| [34] | Hybrid | Thermal, Solar, WTs, BSS | MPC | Fuzzy logic | Manage distributed power and system constraints, Good response to physical and operational constraints | Increasingly complex when more criteria for evaluation and model parameters are added |
| [52] | Hybrid | Steam, WTs | PI | Particle swarm optimization, Bacterial foraging algorithm | Reduces the settling time, Adaptable to parameter variations, Eliminate frequency area control error | Multiple disturbances are not evaluated simultaneously, Improperly configured PI/PID controllers may reduce dynamic performance |
| [54] | Hybrid | Thermal, WTs | SMC | Disrupted oppositional learned gravitational search algorithm | Good frequency response during load disturbances, Requiring less computational effort, Minimizes objective function optimal values | Variations in parameters and physical constraints are not examined, Reduce resilience in regard to time delays |
| [63] | Renewable | WTs | PID, PIDA | TLBO, Harmony search algorithm, Sine-cosine algorithm | Optimize transient frequency response and tie-line power, Excellent performance for load fluctuations | Increasing parametric uncertainty and plant non-linearities reduce efficiency |
| [64] | Hybrid | Thermal, Gas, Solar, WTs, EV, HES | Tilt-PID | Quasi Opposition Lion Optimization Algorithm | Reduced settling time. Suitable for varying wind power penetration, Good response to system non-linearity | - |
| [67] | Conventional | Reheat-Thermal | PIλD | Differential Evolution | Robustness to non-linear constraints and fuel dynamics, Resilience to increased load disturbance, and severe parametric fluctuation | WTG penetration and its impact on LFC are ignored |
| [68] | Hybrid | Wave, Geothermal, Hydro, Thermal, WTs | TIDN-(1+PI) | - | Lower peak overshoot/undershoot, Increased system-damping factor, Enhanced stability in the presence of numerous non-linearities and load disturbances | PI’s control theory remained unchanged, limiting the system’s adaptability to complex systems |
| [80] | Hybrid | Thermal, Solar, EV | IDD | Magnetotactic bacteria optimization | Robustness to load disturbances and overloading, Suitable for varying solar penetration | Not considered WTGs for LFC |
| [69] | Hybrid | Reheat-Thermal, Hydro | PI | Self-Adaptive Modified Bat Algorithm, Fuzzy Logic | Resilience against external disruptions and uncertainties, Optimizes system parameters and MFs concurrently | Unstable optimization outcomes, Tendency to slip into local optimums, WTGs are not considered for LFC |
| [72] | Conventional | Reheat-Thermal | 3DOF-PID | Multi-verse optimization | Improve the design of dynamic controllers, Excellent performance for optimization constraints | WTG penetration and its impact on LFC are ignored |
| [74] | Renewable | Solar, Flywheel, EV, WTs | PI-PD | Moth Swarm Algorithm | Minimize the grid’s oscillation frequency, Simple design and tuning of the controller | Operational and physical constraints are not considered, Improperly configured PI-PD controller may reduce dynamic performance |
| [103] | Hybrid | Reheat-Thermal, Solar | FLC | Genetic algorithm | Reduce overshoot and settling time, Excellent dynamic response, Improved results for varied levels of solar energy penetration | WTGs are not considered for LFC, False data could cause unrealistic system efficiency |
| [104] | Hybrid | Thermal, Hydro, Gas | ADRC | Double chains quantum genetic algorithm | Ability to handle non-linear constraints, Reduce the stabilization time, Ability to handle non-linear constraints | Difficulty in adjusting parameters, Slow rate of convergence, WTGs are not evaluated |
| [120] | Conventional | Thermal | Fuzzy-PID | Differential evolution | Adaptable to parameter variations, Avoid re-tuning controller parameters under varied loading conditions | WTG penetration and its impact on LFC are ignored, Difficulty in attaining optimum controller gain, Needs considerable training data for implementation |
| [121] | Hybrid | Thermal, Hydro, Gas, Solar, WTs | PI | Multi-verse optimization | Robustness to loading disturbances, Adaptable to changes in input parameters | Not considering the impact of non-linearities, No detailed analysis of the proposed system, System is susceptible to large staring overshoot, and the controller gains |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Asghar, R.; Riganti Fulginei, F.; Wadood, H.; Saeed, S. A Review of Load Frequency Control Schemes Deployed for Wind-Integrated Power Systems. Sustainability 2023, 15, 8380. https://doi.org/10.3390/su15108380
Asghar R, Riganti Fulginei F, Wadood H, Saeed S. A Review of Load Frequency Control Schemes Deployed for Wind-Integrated Power Systems. Sustainability. 2023; 15(10):8380. https://doi.org/10.3390/su15108380
Chicago/Turabian StyleAsghar, Rafiq, Francesco Riganti Fulginei, Hamid Wadood, and Sarmad Saeed. 2023. "A Review of Load Frequency Control Schemes Deployed for Wind-Integrated Power Systems" Sustainability 15, no. 10: 8380. https://doi.org/10.3390/su15108380