




Optimal Parking Path Planning and Parking Space Selection Based on the Entropy Power Method and Bayesian Network: A Case Study in an Indoor Parking Lot




Abstract
:1. Introduction
2. Methods and Model Establishment
2.1. Vehicle Model
2.1.1. Vehicle Parameters
2.1.2. Vehicle Kinematic Model
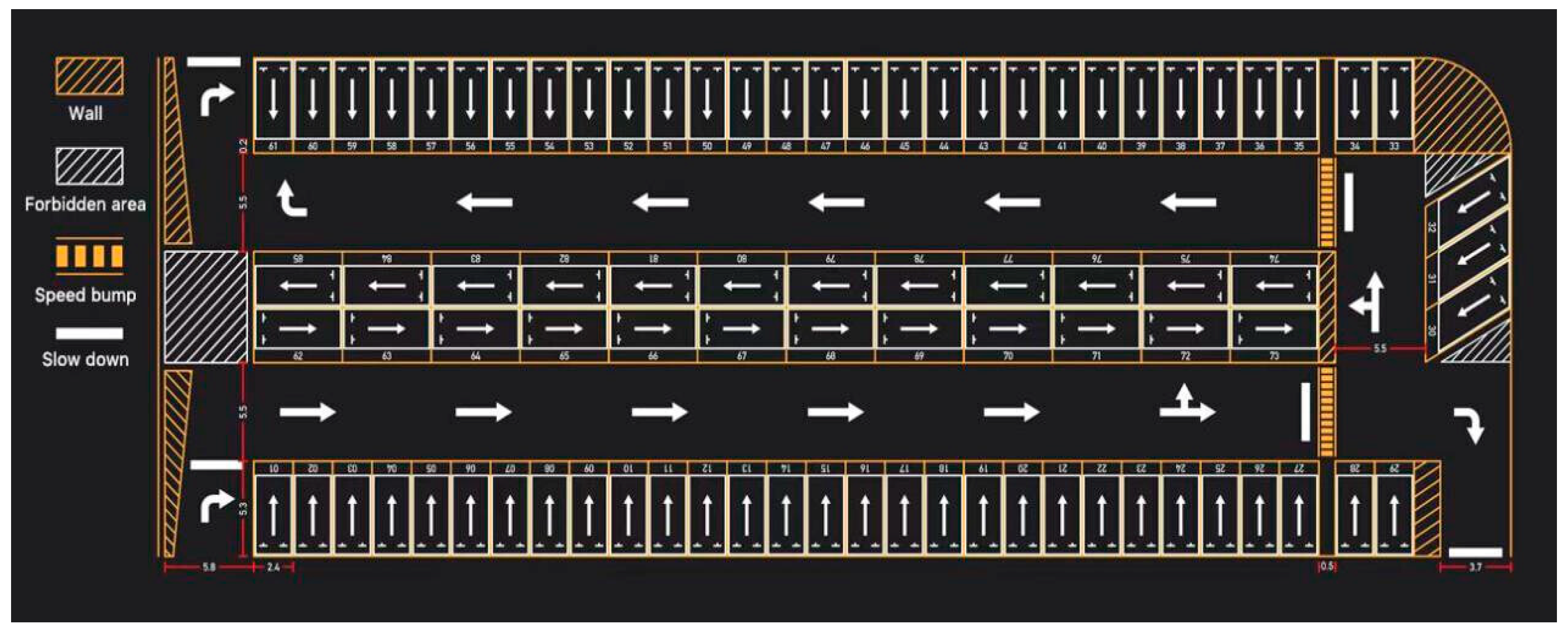
2.2. Parking Lot Plan Model
2.3. Entropy Method [16,17,18,19]
2.4. Bayesian Networks [20,21,22,23]
2.5. Principle of KMO Test [24]
3. Analysis and Results Discussion
3.1. Vehicle Parking Path Planning
3.1.1. Vertical Parking
Vertical Parking Path Planning
Analysis of Vertical Parking Obstacle Avoidance
- (1)
- The vehicle apex does not collide with the left parking space boundary.
- (2)
- The vehicles do not collide with obstacles on the right.
- (3)
- The vehicles sit on top of the apex and road boundaries without colliding.
Vertical Parking Trajectory
3.1.2. Parallel Parking
Parallel Parking Path Planning and Obstacle Avoidance Analysis
Parallel Parking Trajectory
3.1.3. Inclined Parking
Inclined Parking Path Planning
Obstacle Avoidance Analysis of Inclined Parking Path
3.2. Optimal Berth Selection
3.2.1. Static Optimal Parking Space Selection Based on Entropy Weight Method
Parking Space Attributes
Types of Parking Spaces
Left and Right Situation
3.2.2. Distance
3.2.3. Dynamic Optimal Parking Space Selection Based on Entropy Weight Method and Bayesian Network
4. Conclusions
- (1)
- Clear and specific analysis of the obstacles when parking the vehicle into the parking space is demonstrated with good consistency, and the parking guidance trajectory given by the parking assistance parking system is both safe and fast.
- (2)
- In the static case of selecting the optimal parking position, compared with other methods, the proposed method is more lightweight, faster, and more accurate in calculation, and can quickly give feedback on the optimal solution.
- (3)
- In the dynamic case, the proposed method can learn the situation of the previous moment to reason out the parking space usage condition of the next moment, which is highly sensitive and can adapt well to the change of site conditions, and the auxiliary system could give the car driver a quick guide to find a suitable parking space in a crowded and busy parking lot.
- (4)
- Based on the findings of this research, the efficient parking path and parking lot selection could be applied in the future rearrangement of indoor parking lots, which could be a feasible way to improve the whole process management sustainability.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lee, B.; Wei, Y.; Guo, I.Y. Automatic parking of self-driving car based on lidar. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2/W7, 241–246. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, H.; Song, S.; Hu, F. Reinforcement Learning-Based Motion Planning for Automatic Parking System. IEEE Access 2020, 8, 154485–154501. [Google Scholar] [CrossRef]
- Gan, N.; Zhang, M.; Zhou, B.; Chai, T.; Wu, X.; Bian, Y. Spatio-temporal heuristic method: A trajectory planning for automatic parking considering obstacle behavior. J. Intell. Connect. Veh. 2022, 5, 177–187. [Google Scholar] [CrossRef]
- Zhang, C.; Zhou, R.; Lei, L.; Yang, X. Research on Automatic Parking System Strategy. World Electr. Veh. J. 2021, 12, 200. [Google Scholar] [CrossRef]
- Su, B.; Yang, J.; Li, L.; Wang, Y. Secondary parallel automatic parking of endpoint regionalization based on genetic algorithm. Clust. Comput. 2019, 22, 7515–7523. [Google Scholar] [CrossRef]
- García, J.M.C.; Piorno, J.R.; Mata-García, M.G. Expert system design for vacant parking space location using automatic learning and artificial vision. Multimed. Tools Appl. 2022, 81, 38661–38683. [Google Scholar] [CrossRef] [PubMed]
- Oetiker, M.B.; Baker, G.P.; Guzzella, L. A Navigation-Field-Based Semi-Autonomous Nonholonomic Vehicle-Parking Assistant. IEEE Trans. Veh. Technol. 2009, 58, 1106–1118. [Google Scholar] [CrossRef]
- Zeng, C.; Ma, C.; Wang, K.; Cui, Z.; Dawson, K.A.; Indekeu, J.O.; Stanley, H.E.; Tsallis, C. Predicting vacant parking space availability: A DWT-Bi-LSTM model. Phys. A Stat. Mech. Its Appl. 2022, 599, 127498. [Google Scholar] [CrossRef]
- Peng, X.; Sun, Z.; Chen, M.; Geng, Z. Arbitrary Configuration Stabilization Control for Nonholonomic Vehicle with Input Saturation: A c-Nonholonomic Trajectory Approach. IEEE Trans. Ind. Electron. 2021, 69, 1663–1672. [Google Scholar] [CrossRef]
- Aye, Y.Y.; Watanabe, K.; Maeyama, S.; Nagai, I. An automatic parking system using an optimized image-based fuzzy controller by genetic algorithms. Artif. Life Robot. 2016, 22, 1–6. [Google Scholar] [CrossRef]
- Zhang, P.; Yu, Z.; Xiong, L.; Zeng, D. Research on Parking Slot Tracking Algorithm Based on Fusion of Vision and Vehicle Chassis Information. Int. J. Automot. Technol. 2020, 21, 603–614. [Google Scholar] [CrossRef]
- Chai, R.; Tsourdos, A.; Savvaris, A.; Chai, S.; Xia, Y.; Chen, C. Design and Implementation of Deep Neural Network-Based Control for Automatic Parking Maneuver Process. IEEE Trans. Neural Netw. Learn. Syst. 2020, 33, 1400–1413. [Google Scholar] [CrossRef] [PubMed]
- Nakrani, N.M.; Joshi, M.M. A human-like decision intelligence for obstacle avoidance in autonomous vehicle parking. Appl. Intell. 2021, 52, 3728–3747. [Google Scholar] [CrossRef]
- Lee, C.K.; Lin, C.L.; Shiu, B.M. Autonomous Vehicle Parking Using Hybrid Artificial Intelligent Approach. J. Intell. Robot. Syst. 2009, 56, 319–343. [Google Scholar] [CrossRef]
- Xie, J.; He, Z.; Zhu, Y. A DRL based cooperative approach for parking space allocation in an automated valet parking system. Appl. Intell. 2022, 53, 5368–5387. [Google Scholar] [CrossRef]
- Zhang, H.; Jiang, W.; Deng, X. Data-driven multi-attribute decision-making by combining probability distributions based on compatibility and entropy. Appl. Intell. 2020, 50, 4081–4093. [Google Scholar] [CrossRef]
- Joseph, A.G.; Bhatnagar, S. An online prediction algorithm for reinforcement learning with linear function approximation using cross entropy method. Mach. Learn. 2018, 107, 1385–1429. [Google Scholar] [CrossRef]
- Jiaxin, L.; Weijun, W.; Yingchao, Z.; Song, C. Multi-Objective Optimal Design of Stand-Alone Hybrid Energy System Using Entropy Weight Method Based on HOMER. Energies 2017, 10, 1664. [Google Scholar]
- Xu, T.; Gondra, I.; Chiu, D.K. A maximum partial entropy-based method for multiple-instance concept learning. Appl. Intell. 2016, 46, 865–875. [Google Scholar] [CrossRef]
- Bgm, A.; Tdp, B. Advances in Bayesian network modelling: Integration of modelling technologies. Environ. Model. Softw. 2019, 111, 386–393. [Google Scholar]
- Larra Aga, P.; Karshenas, H.; Bielza, C.; Santana, R. A review on evolutionary algorithms in Bayesian network learning and inference tasks. Inf. Sci. Int. J. 2013, 233, 109–125. [Google Scholar]
- Rohmer, J. Uncertainties in conditional probability tables of discrete Bayesian Belief Networks: A comprehensive review. Eng. Appl. Artif. Intell. 2020, 88, 103384. [Google Scholar] [CrossRef]
- Daly, R.; Shen, Q.; Aitken, S. Learning Bayesian networks: Approaches and issues. Knowl. Eng. Rev. 2011, 26, 99–157. [Google Scholar] [CrossRef]
- Kim, J.O.; Mueller, C.W. Introduction to factor analysis: What it is and how to do it. Contemp. Sociol. 1980, 9, 562. [Google Scholar]
- Kaiser, H.F. An Index of Factorial Simplicity. Psychometrika 1974, 39, 31–36. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Category | Range of Values | Factor Analysis is Appropriate for the Situation |
|---|---|---|
| Perfect for | ||
| Great for | ||
| Suitable for | ||
| Barely fit | ||
| Not really suitable | ||
| Not suitable |
| /s | /m/s | /m | /m/s2 | /m/s3 | |
|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 | 90 |
| 0.15 | 0.25 | 0.01125 | 3 | 20 | 90 |
| 0.59 | 1.544 | 0.4 | 3 | 0 | 90 |
| 7.082 | 1.544 | 10.423 | 0 | 0 | 0 |
| 7.232 | 1.769 | 10.655 | 3 | 20 | 0 |
| 8.494 | 5.556 | 20.055 | 3 | 0 | 0 |
| 10.619 | 5.556 | 31.863 | 0 | 0 | 0 |
| 10.919 | 4.656 | 33.348 | −6 | −20 | 0 |
| 11.695 | 0 | 35.155 | −6 | 0 | 0 |
| Vacant Parking Space Number | Coordinate Location |
|---|---|
| 2 | (−57.35, −5.7) |
| 5 | (−50.15, −5.7) |
| 6 | (−40.55, −5.7) |
| 13 | (−30.95, −5.7) |
| 45 | (−21.35, 16.2) |
| 47 | (−26.15, 16.2) |
| 49 | (−30.95, 16.2) |
| 52 | (−38.15, 16.2) |
| 53 | (−40.55, 16.2) |
| 54 | (−42.95, 16.2) |
| 64 | (−44.6, 4.15) |
| 67 | (−29.3, 4.15) |
| 78 | (−19.1, 6.55) |
| 81 | (−34.4, 6.55) |
| 82 | (−39.5, 6.55) |
| Parking Space Number | p1 (Type of Parking Space) | p2 (Left and Right Cases) | p3 (Distance) |
|---|---|---|---|
| 2 | 0 | 1 | 1.00 |
| 5 | 0 | 1 | 0.81 |
| 9 | 0 | 1 | 0.55 |
| 13 | 0 | 1 | 0.30 |
| 45 | 0 | 1 | 0.18 |
| 47 | 0 | 1 | 0.28 |
| 49 | 0 | 1 | 0.39 |
| 52 | 0 | 0.2 | 0.57 |
| 53 | 0 | 0 | 0.63 |
| 54 | 0 | 0.4 | 0.69 |
| 64 | 1 | 1 | 0.66 |
| 67 | 1 | 1 | 0.25 |
| 78 | 1 | 0.2 | 0.00 |
| 81 | 1 | 0.4 | 0.40 |
| 82 | 1 | 1 | 0.53 |
| Parking Space Number | p1 (Type of Parking Space) | p2 (Left and Right Cases) | p3 (Distance) |
|---|---|---|---|
| 2 | 0.05 | 0.08 | 0.10 |
| 5 | 0.05 | 0.08 | 0.09 |
| 9 | 0.05 | 0.08 | 0.07 |
| 13 | 0.05 | 0.08 | 0.05 |
| 45 | 0.05 | 0.08 | 0.05 |
| 47 | 0.05 | 0.08 | 0.05 |
| 49 | 0.05 | 0.08 | 0.06 |
| 52 | 0.05 | 0.05 | 0.07 |
| 53 | 0.05 | 0.04 | 0.08 |
| 54 | 0.05 | 0.05 | 0.08 |
| 64 | 0.1 | 0.08 | 0.08 |
| 67 | 0.1 | 0.08 | 0.05 |
| 78 | 0.1 | 0.05 | 0.04 |
| 81 | 0.1 | 0.05 | 0.06 |
| 82 | 0.1 | 0.08 | 0.07 |
| Properties | p1 (Type of Parking Space) | p2 (Left and Right Cases) | p3 (Distance) |
|---|---|---|---|
| Weights | 0.517 | 0.211 | 0.272 |
| Parking Space Number | Difficulty Score |
|---|---|
| 2 | 0.23 |
| 5 | 0.21 |
| 9 | 0.18 |
| 13 | 0.15 |
| 45 | 0.14 |
| 47 | 0.15 |
| 49 | 0.16 |
| 52 | 0.09 |
| 53 | 0.07 |
| 54 | 0.13 |
| 64 | 0.96 |
| 67 | 0.91 |
| 78 | 0.79 |
| 81 | 0.86 |
| 82 | 0.95 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xue, J.; Wang, J.; Yi, J.; Wei, Y.; Huang, K.; Ge, D.; Sun, R. Optimal Parking Path Planning and Parking Space Selection Based on the Entropy Power Method and Bayesian Network: A Case Study in an Indoor Parking Lot. Sustainability 2023, 15, 8450. https://doi.org/10.3390/su15118450
Xue J, Wang J, Yi J, Wei Y, Huang K, Ge D, Sun R. Optimal Parking Path Planning and Parking Space Selection Based on the Entropy Power Method and Bayesian Network: A Case Study in an Indoor Parking Lot. Sustainability. 2023; 15(11):8450. https://doi.org/10.3390/su15118450
Chicago/Turabian StyleXue, Jingwei, Jiaqing Wang, Jiyang Yi, Yang Wei, Kaijian Huang, Daming Ge, and Ruiyu Sun. 2023. "Optimal Parking Path Planning and Parking Space Selection Based on the Entropy Power Method and Bayesian Network: A Case Study in an Indoor Parking Lot" Sustainability 15, no. 11: 8450. https://doi.org/10.3390/su15118450