
Calculation and Analysis of Unbalanced Magnetic Pull of Rotor under Motor Air Gap Eccentricity Fault


Abstract
:1. Introduction
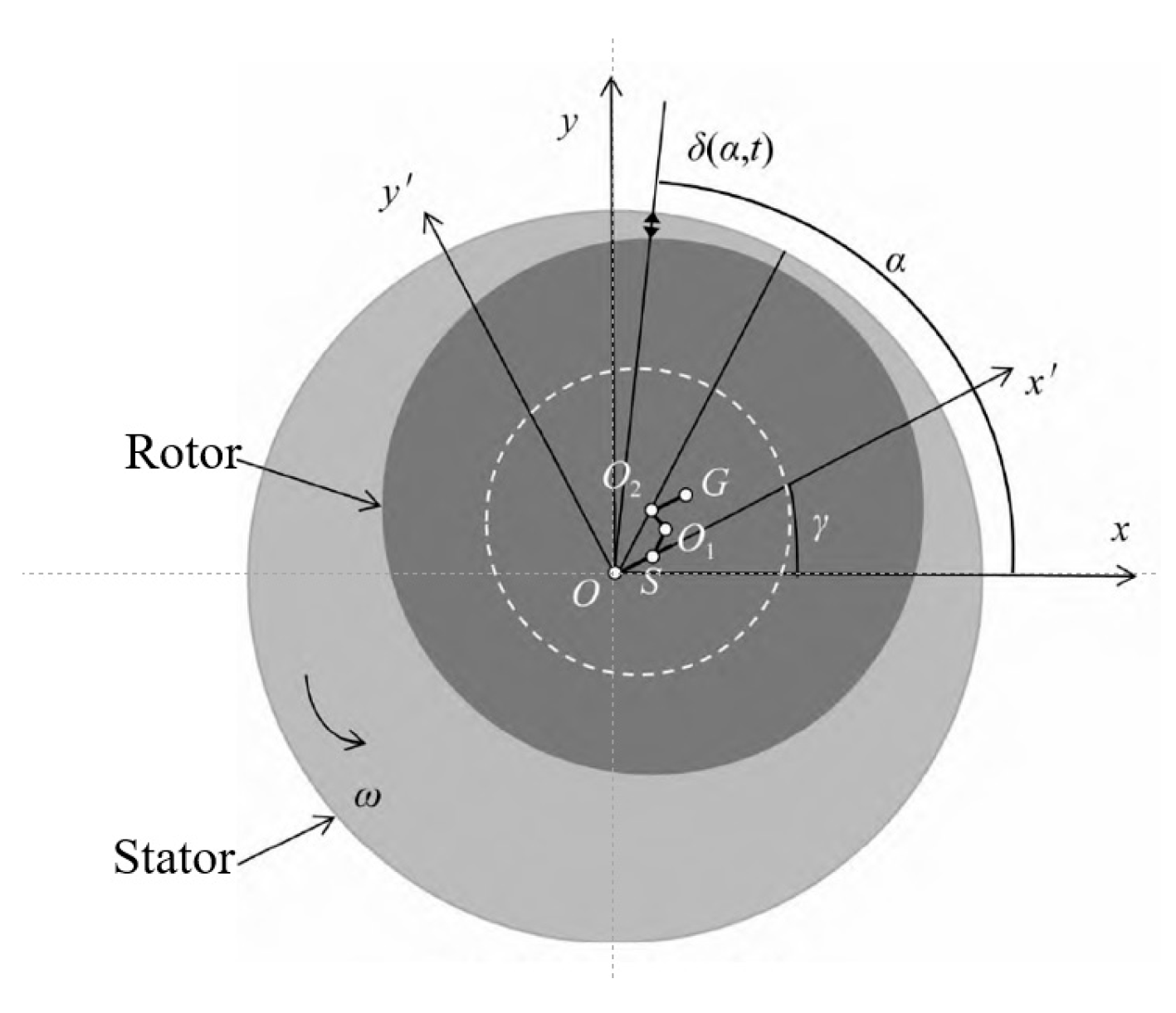
2. Calculation Method of UMP
2.1. Calculation Method of Linear Empirical Formula
2.2. Nonlinear Calculation Method
2.2.1. Energy Method
2.2.2. Maxwell Stress Integration Method
3. Finite Element Simulation
3.1. Numerical Calculation
- (1)
- UMP of rotor under static eccentricity of air gap

- (2)
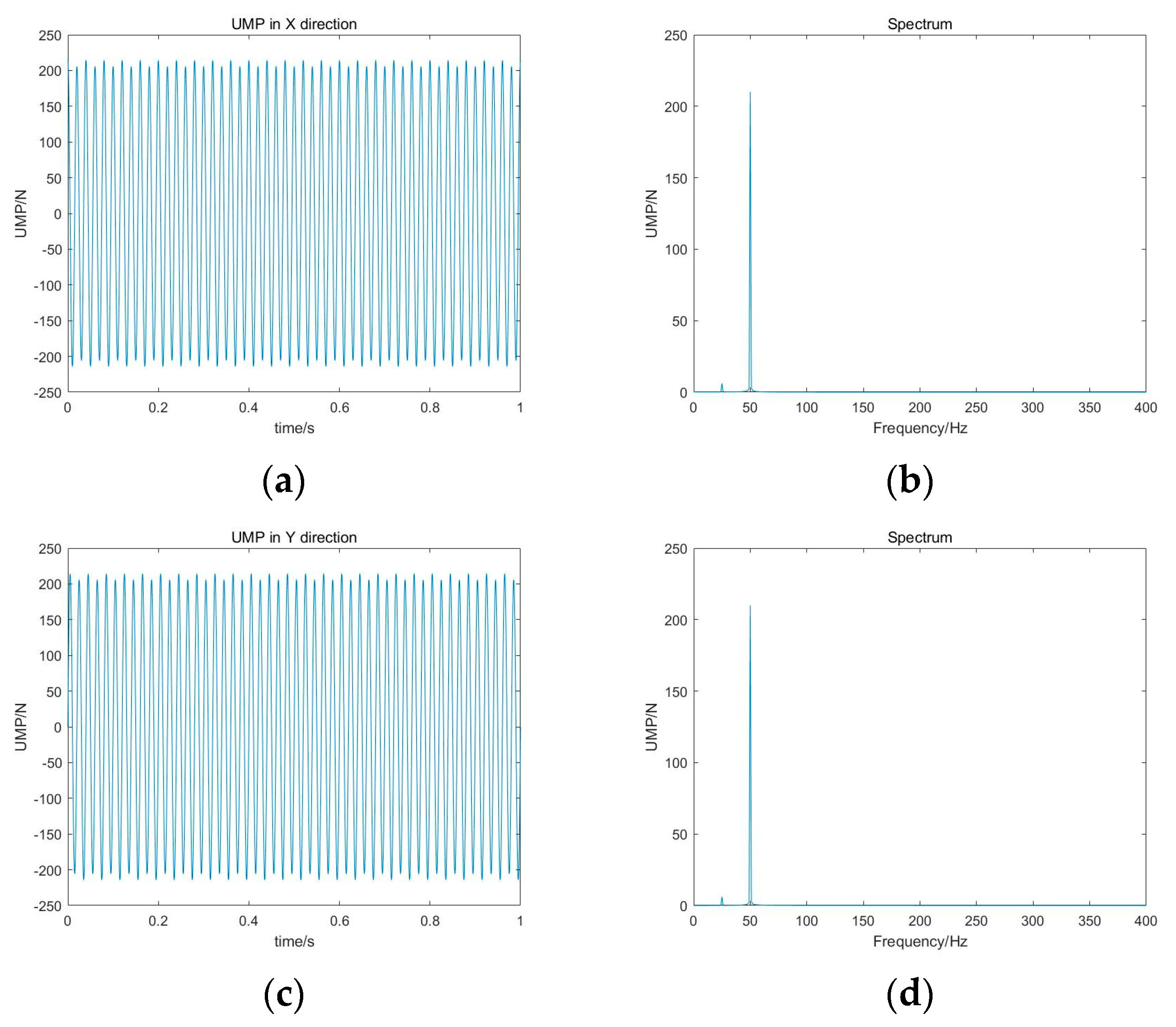
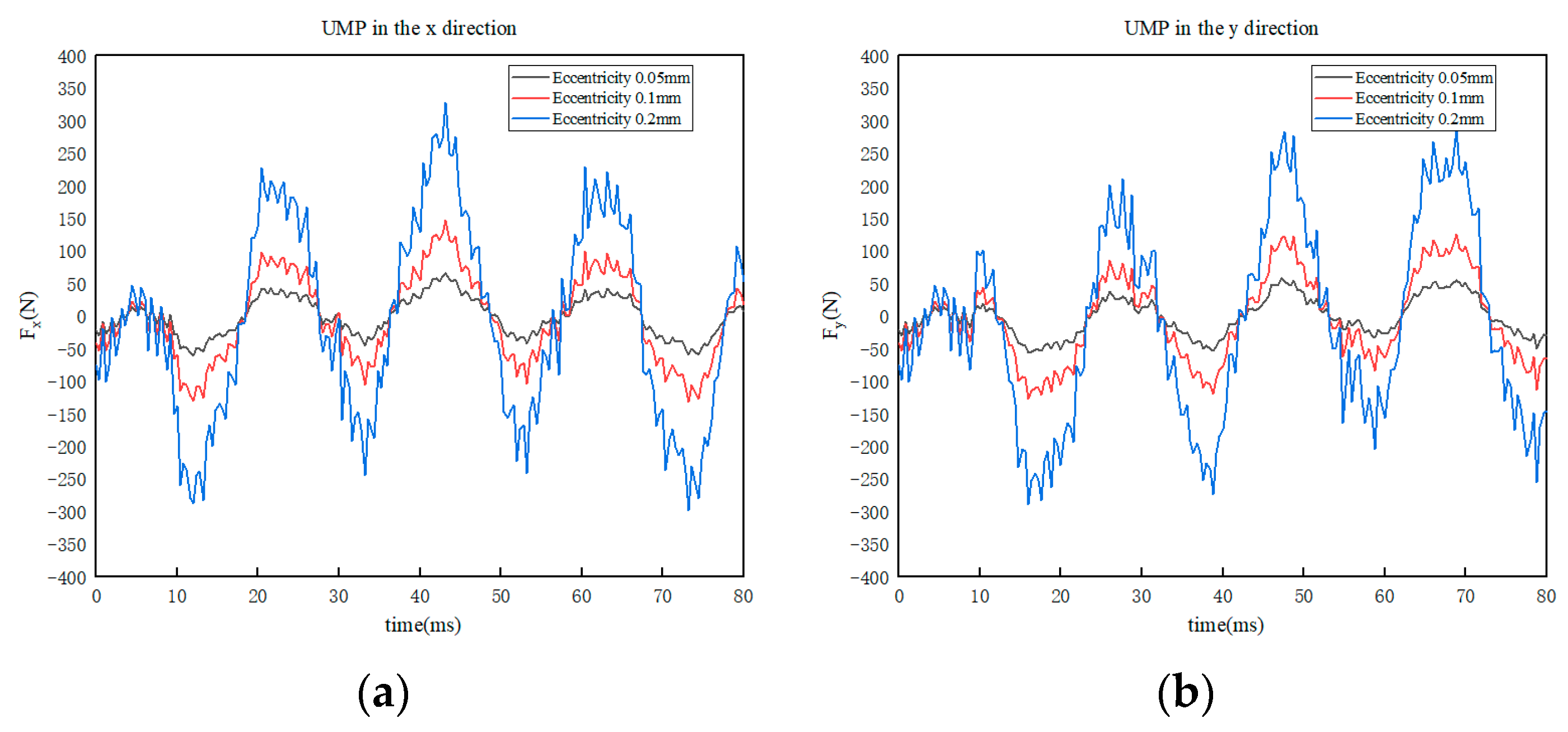
- UMP of rotor under dynamic eccentricity of air gap
- (3)
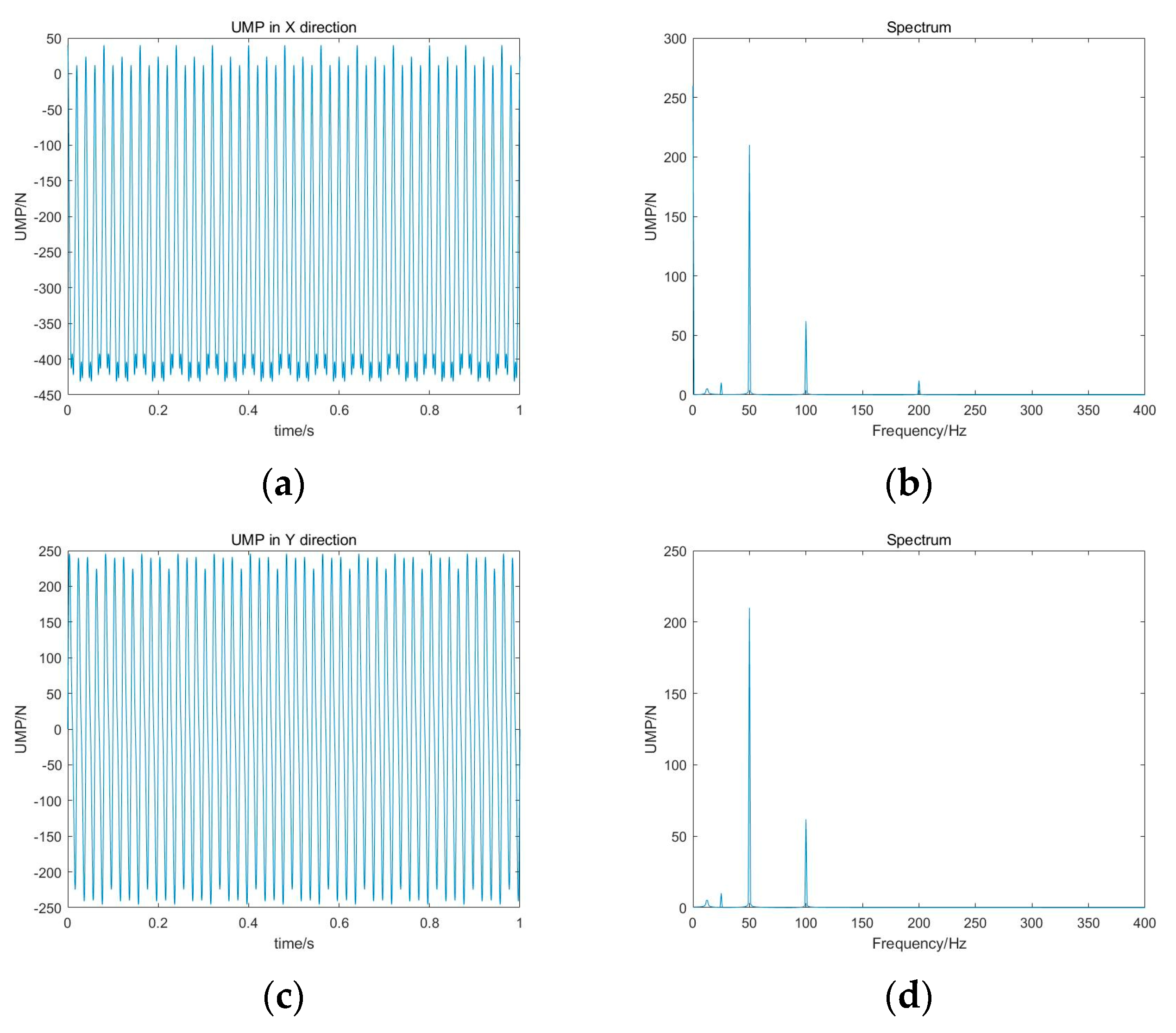
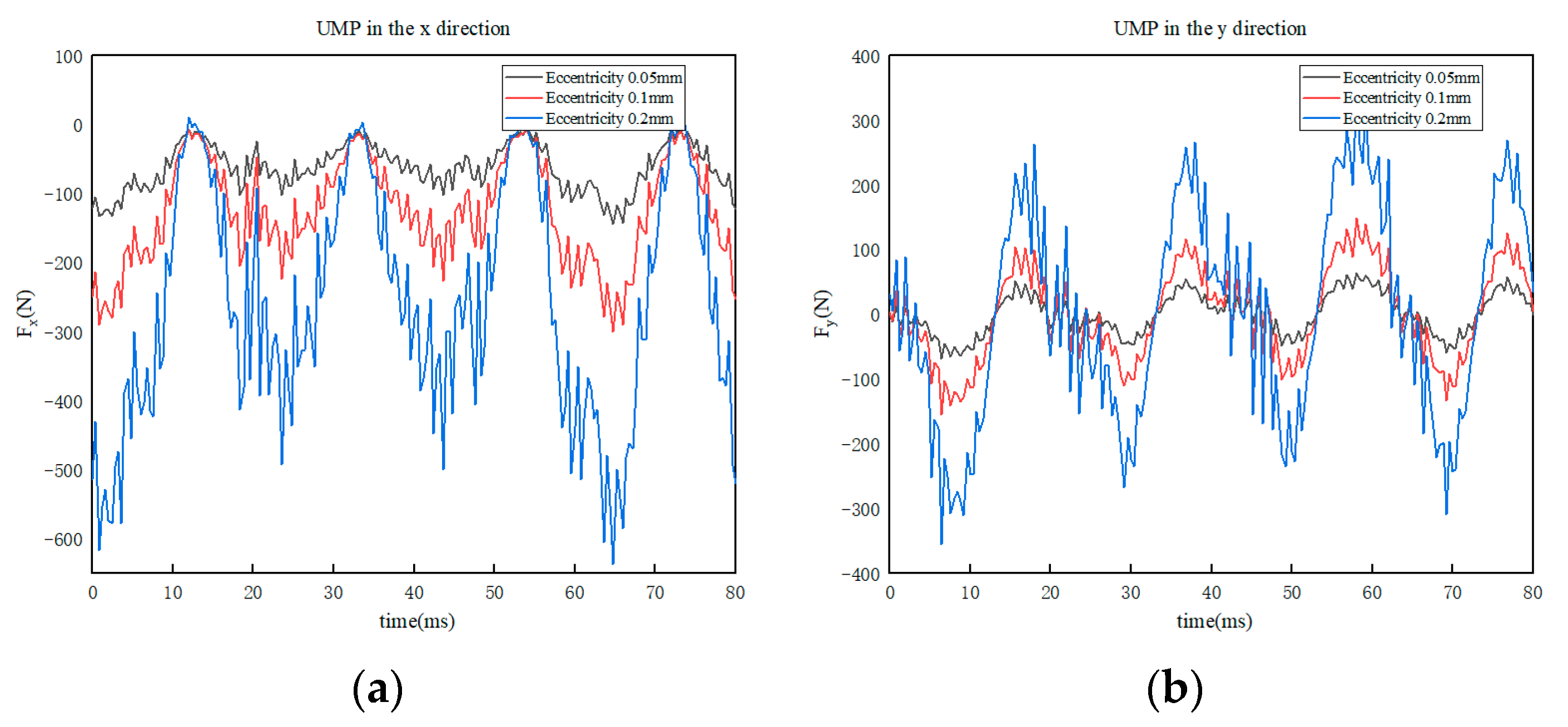
- UMP of rotor under mixed with static and dynamic eccentricity of air gap
3.2. Finite Element Simulation Based on Maxwell
- (1)
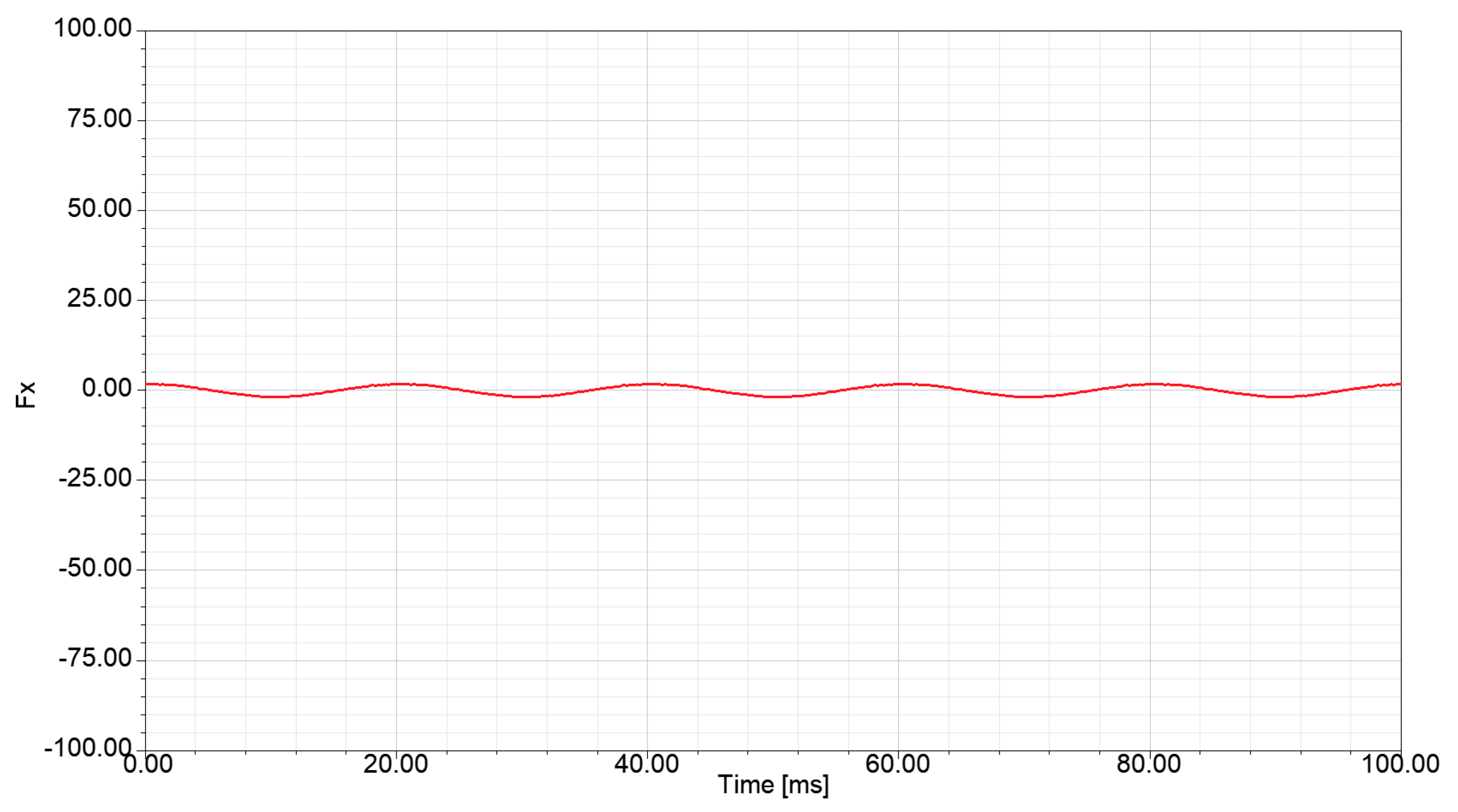
- UMP of rotor under normal conditions
- (2)
- UMP of rotor under static air gap eccentricity fault
- (3)
- UMP of rotor under dynamic air gap eccentricity fault
- (4)
- UMP of rotor in case of static and dynamic mixed air gap eccentricity fault
3.3. Comparison of Two Calculation Methods
- (1)
- Air gap static eccentricity

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
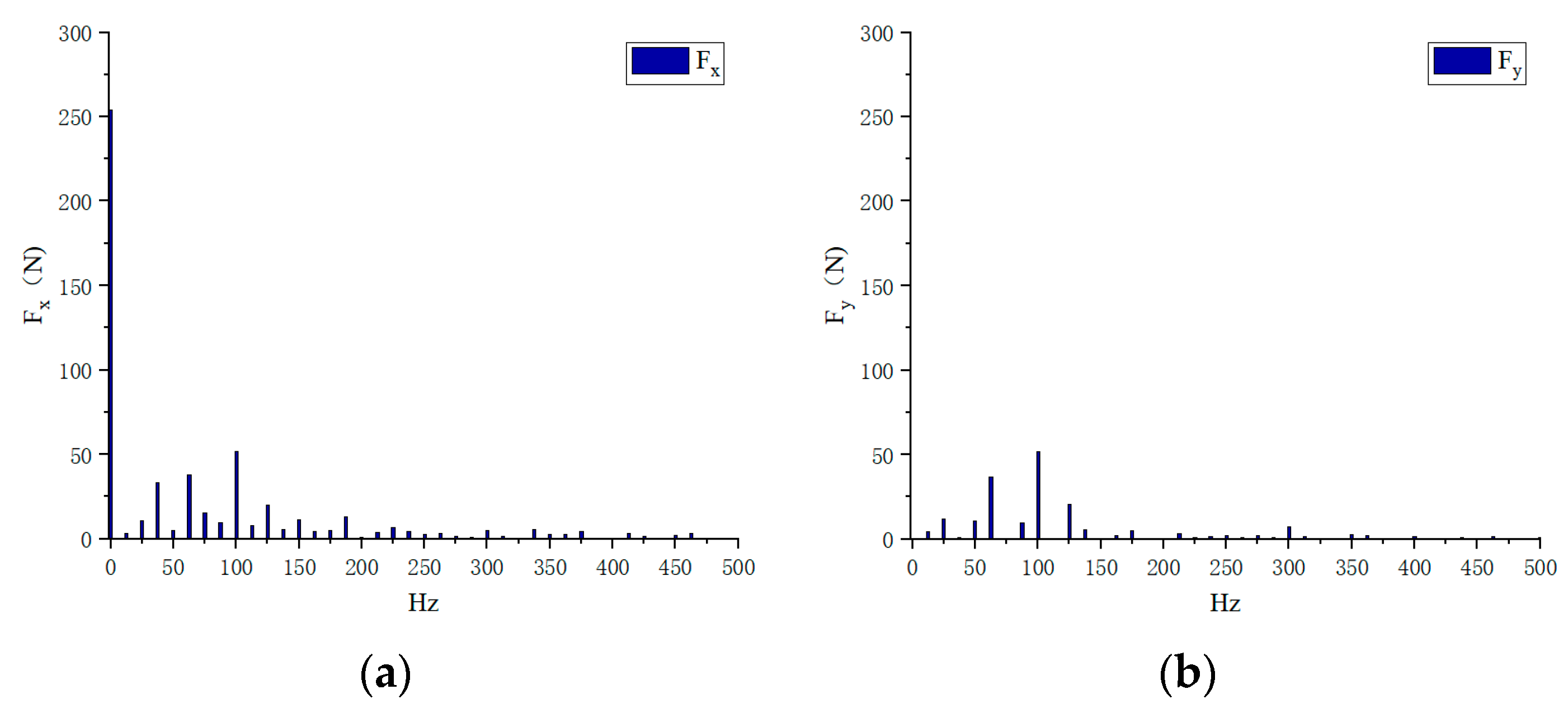
| Method | 0 Hz | 50 Hz | 100 Hz |
|---|---|---|---|
| Energy method | 261.1 N | 15.3 N | 62.3 N |
| Finite element calculation | 258.3 N | 6.1 N | 61.2 N |
- (2)
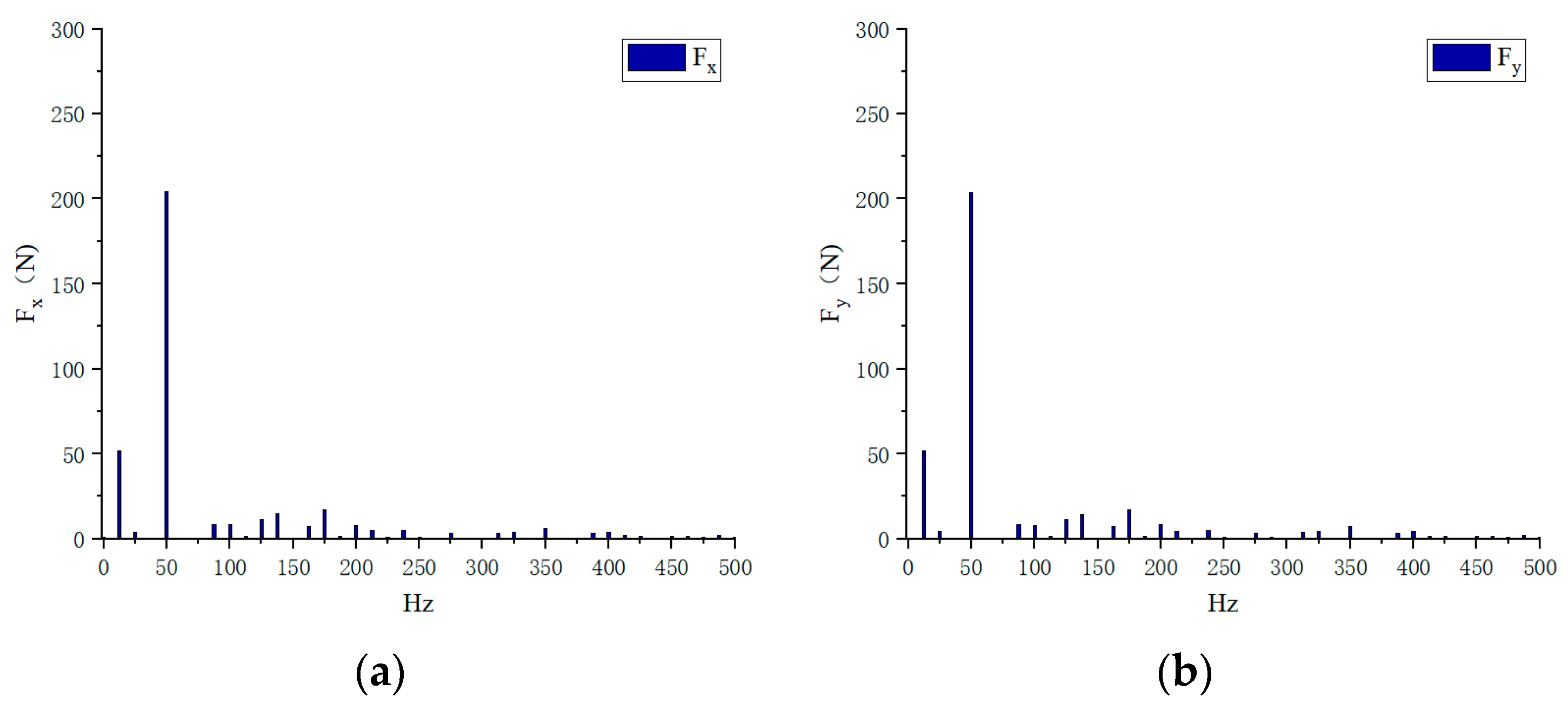
- Air gap dynamic eccentricity
| Method | 0 Hz | 50 Hz | 100 Hz |
|---|---|---|---|
| Energy method | 0 N | 210.2 N | 0 N |
| Finite element calculation | 0 N | 208.6 N | 5.3 N |
- (3)
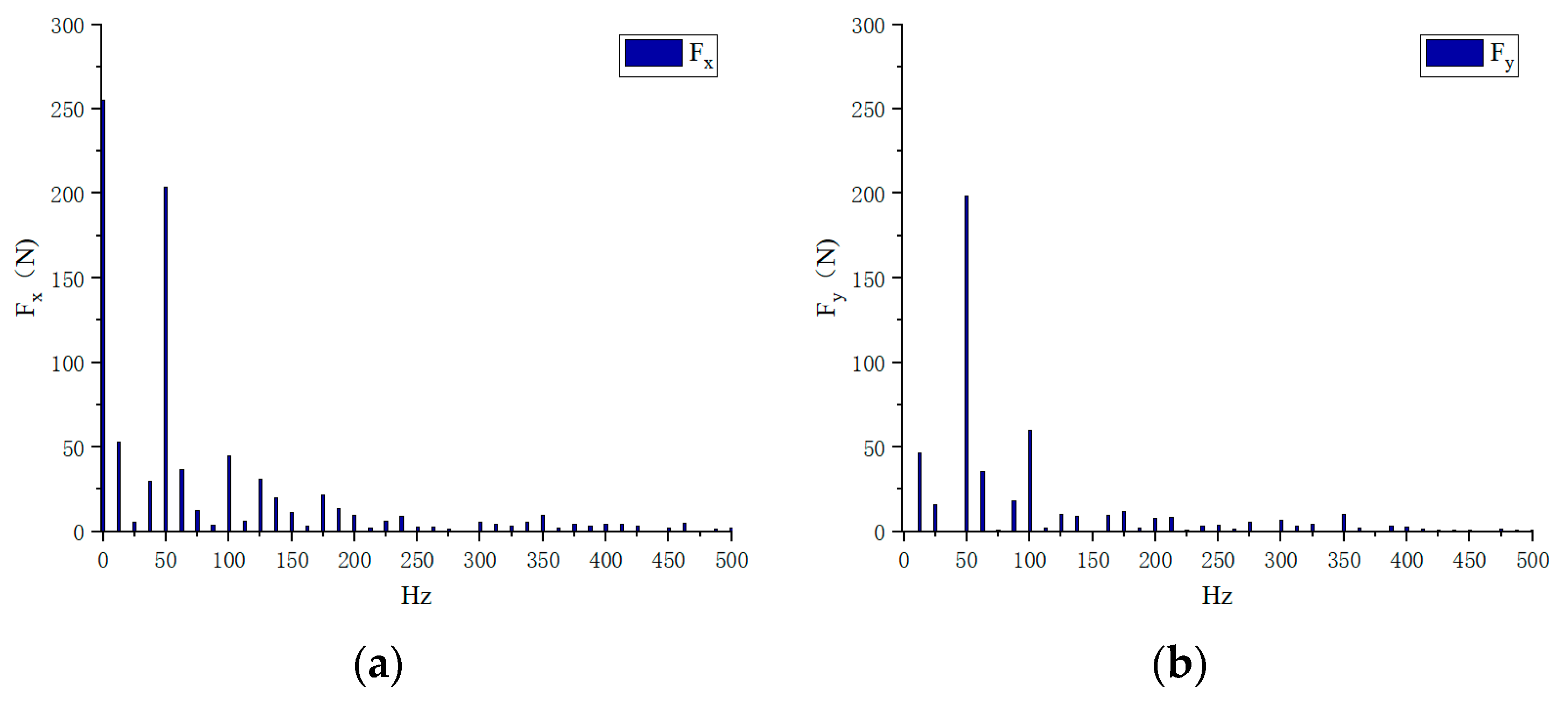
- Air gap dynamic and static mixing eccentricity
| Method | 0 Hz | 50 Hz | 100 Hz |
|---|---|---|---|
| Energy method | 262.3 N | 210.5 N | 62.3 N |
| Finite element calculation | 259.8 N | 208.6 N | 61.5 N |
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xu, X.P.; Han, Q.K.; Chu, F.L. Electromagnetic vibration characteristics of eccentric rotor under static load. J. Tsinghua Univ. (Nat. Sci. Sect.) 2016, 56, 176–184. [Google Scholar]
- Wan, S.T.; Peng, B. Distinction of electromagnetic torque characteristics between air gap static eccentricity and rotor interturn short circuit. J. Chin. Eng. Mach. 2021, 19, 65–71. [Google Scholar]
- Bao, X.H.; Lv, Q. Review and Prospect of Research on Air Gap Eccentricity Fault of Induction Motors. J. Chin. Electr. Eng. Sci. 2013, 33, 93–100 + 14. [Google Scholar]
- He, Y.L.; Wan, S.T.; Tang, G.J.; Xiang, L. Research on identification method of air gap eccentricity fault degree of turbo generator based on stator vibration characteristics. J. Vib. Shock 2012, 31, 53–57 + 89. [Google Scholar]
- Di, C.; Bao, X.; Wang, H.; Lv, Q.; He, Y. Modeling and Analysis of Unbalanced Magnetic Pull in Cage Induction Motors with Curved Dynamic Eccentricity. IEEE Trans. Magn. 2015, 51, 1–7. [Google Scholar]
- Zhou, S.T.; Guo, W.N.; Xiao, Q.; Zhu, J.; Zhou, X.; Tu, W. Analysis on vibration characteristics of traction motor rotor of EMU under eccentricity fault. Eng. Mech. 2021, 38, 216–225. [Google Scholar]
- Di, C.; Petrov, I.; Pyrhonen, J.J.; Bao, X. Unbalanced Magnetic Pull Compensation with Active Magnetic Bearings in a 2 MW High-Speed Induction Machine by FEM. IEEE Trans. Magn. 2018, 54, 194–201. [Google Scholar] [CrossRef]
- Zhou, S.T.; Zhu, J.W.; Xiao, Q. The influence of initial static eccentricity and gravity load on the rotor axis track of motor train traction motor. J. Mech. Eng. 2020, 56, 145–154. [Google Scholar]
- Wu, Y.C.; An, Q.F.; Ma, Q.Q.; Cai, Y.B. Research on unbalanced magnetic pull of typical electromechanical faults of hydrogenerator rotor. Hydropower Energy Sci. 2020, 38, 156–160. [Google Scholar]
- Chuan, H.; Shek, J.K.H. Mitigating Unbalanced Magnetic Pull in Induction Machines Using Active Control Method. IEEE Trans. Magn. 2021, 57, 172–179. [Google Scholar] [CrossRef]
- Zhang, L.; Yuan, Q.; Ma, X.; Hou, X.; Li, Z.; Zhang, J.; Wang, X. Study on Vibration Characteristics of Rotor Bearing System of Hydroelectric Generating Set Based on HB-AFT Method. J. Vib. Shock 2022, 41, 26–32. [Google Scholar] [CrossRef]
- Kumar, G.; Kalita, K.; Tammi, K. Analysis of Bridge Currents and UMP of an Induction Machine with Bridge Configured Winding Using Coupled Field and Circuit. IEEE Trans. Magn. 2018, 54, 8104416. [Google Scholar] [CrossRef]
- Feng, W.; Zhang, K.; Liu, B.G.; Sun, W.F.; Cai, S.J. Dynamic modeling and vibration response analysis of a synchronous motorized spindle with inclined eccentricity. J. Vib. Control 2021, 28, 2950–2964. [Google Scholar] [CrossRef]
- Guo, S.J.; Bai, C.Q. Coupling effect of unbalanced magnetic pull and ball bearing on nonlinear vibration of motor rotor system. J. Vib. Control 2020, 28, 665–676. [Google Scholar] [CrossRef]
- Li, X.W.; Bourdon, A.; Remond, D.; Koechlin, S.; Prieto, D. Angular-based modeling of unbalanced magnetic pull for analyzing the dynamical behavior of a 3-phase induction motor. J. Sound Vib. 2021, 494, 115884. [Google Scholar] [CrossRef]
- Hao, J.; Yao, Z.; Li, C.; Song, W.; Miao, H.; Xu, M.; Liu, Z. Dynamic characteristics analysis of asynchronous motorized spindle considering combined unbalanced magnetic pull and nonlinear bearing restoring force effects. Mech. Syst. Signal Process. 2022, 185, 109807. [Google Scholar] [CrossRef]
- Liu, F.; Xiang, C.L.; Liu, H.; Chen, X.; Feng, F.; Cong, H.; Yu, K. Model and experimental verification of a four degrees-of-freedom rotor considering combined eccentricity and electromagnetic effects. Mech. Syst. Signal Process. 2022, 169, 108740. [Google Scholar] [CrossRef]
- Chen, S.K. Motor Design, 2nd ed.; China Machine Press: Beijing, China, 2017; pp. 186–187. [Google Scholar]
- Lai, W.H.; Huang, K.S.; Zhou, Y. Analysis and calculation of eccentric electromagnetic force and deflection of permanent magnet synchronous motor rotor. Mot. Control Appl. 2022, 49, 74–79 + 95. [Google Scholar]
- He, Y.L.; Wang, F.L.; Tang, G.J. Influence of static eccentricity of generator air gap on electromagnetic torque. Vib. Test Diagn. 2017, 32, 76–81+217. [Google Scholar]
- Guo, D.; Chu, F.; Chen, D. The unbalanced magnetic pull and its effects on vibration in a three-phase generator with eccentric rotor. J. Sound Vib. 2002, 254, 297–312. [Google Scholar] [CrossRef]
| Parameter | Numerical Value |
|---|---|
| m (kg) | 24 |
| k (N/m) | 1.526 × 107 |
| C (N·s/m) | 200 |
| L (m) | 0.1 |
| R (m) | 5 × 10−2 |
| μ0 (N/A2) | 4π × 10−7 |
| Fj (A) | 30 |
| (°) | 27.595 |
| δ0 (m) | 1 × 10−3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, R.; Tong, X.; Han, Q.; He, K.; Wang, X.; Wang, X. Calculation and Analysis of Unbalanced Magnetic Pull of Rotor under Motor Air Gap Eccentricity Fault. Sustainability 2023, 15, 8537. https://doi.org/10.3390/su15118537
Zhu R, Tong X, Han Q, He K, Wang X, Wang X. Calculation and Analysis of Unbalanced Magnetic Pull of Rotor under Motor Air Gap Eccentricity Fault. Sustainability. 2023; 15(11):8537. https://doi.org/10.3390/su15118537
Chicago/Turabian StyleZhu, Rui, Xin Tong, Qingpeng Han, Keyuan He, Xinrou Wang, and Xuechao Wang. 2023. "Calculation and Analysis of Unbalanced Magnetic Pull of Rotor under Motor Air Gap Eccentricity Fault" Sustainability 15, no. 11: 8537. https://doi.org/10.3390/su15118537
APA StyleZhu, R., Tong, X., Han, Q., He, K., Wang, X., & Wang, X. (2023). Calculation and Analysis of Unbalanced Magnetic Pull of Rotor under Motor Air Gap Eccentricity Fault. Sustainability, 15(11), 8537. https://doi.org/10.3390/su15118537