
Modelling Parking Choice Behaviour Considering Alternative Availability and Systematic and Random Variations in User Tastes



Abstract
:1. Introduction
- Develop a methodology which provides more realism when simulating parking scenarios. The hypothetical scenarios were obtained by adapting them to the drivers’ actual journeys (pivot design).
- Define the most influential variables affecting user parking choice.
- Simulate which policies could increase the use of more efficient and sustainable parking alternatives.
2. Literature Review
3. Methodology
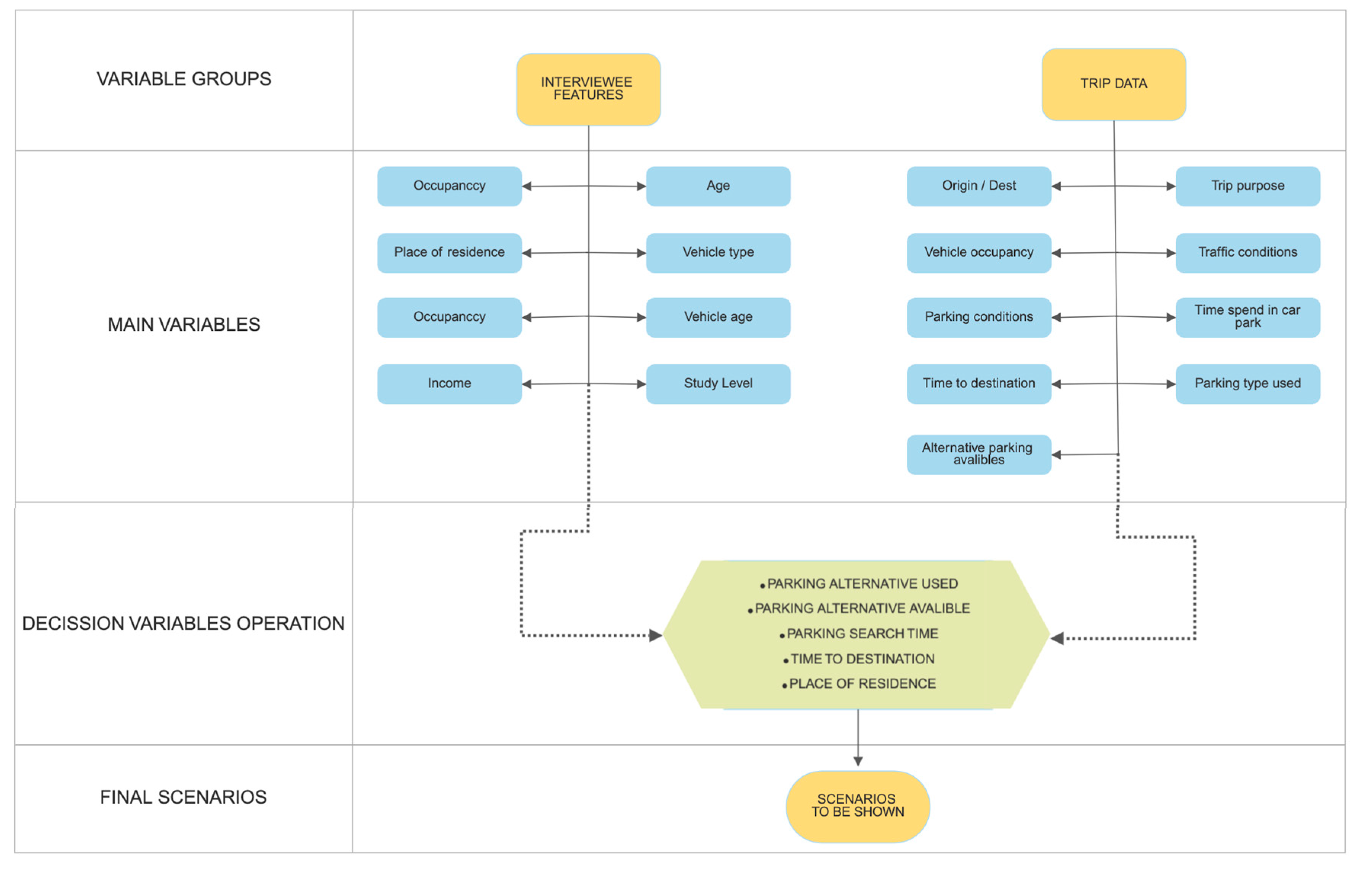
3.1. Selection of Attributes
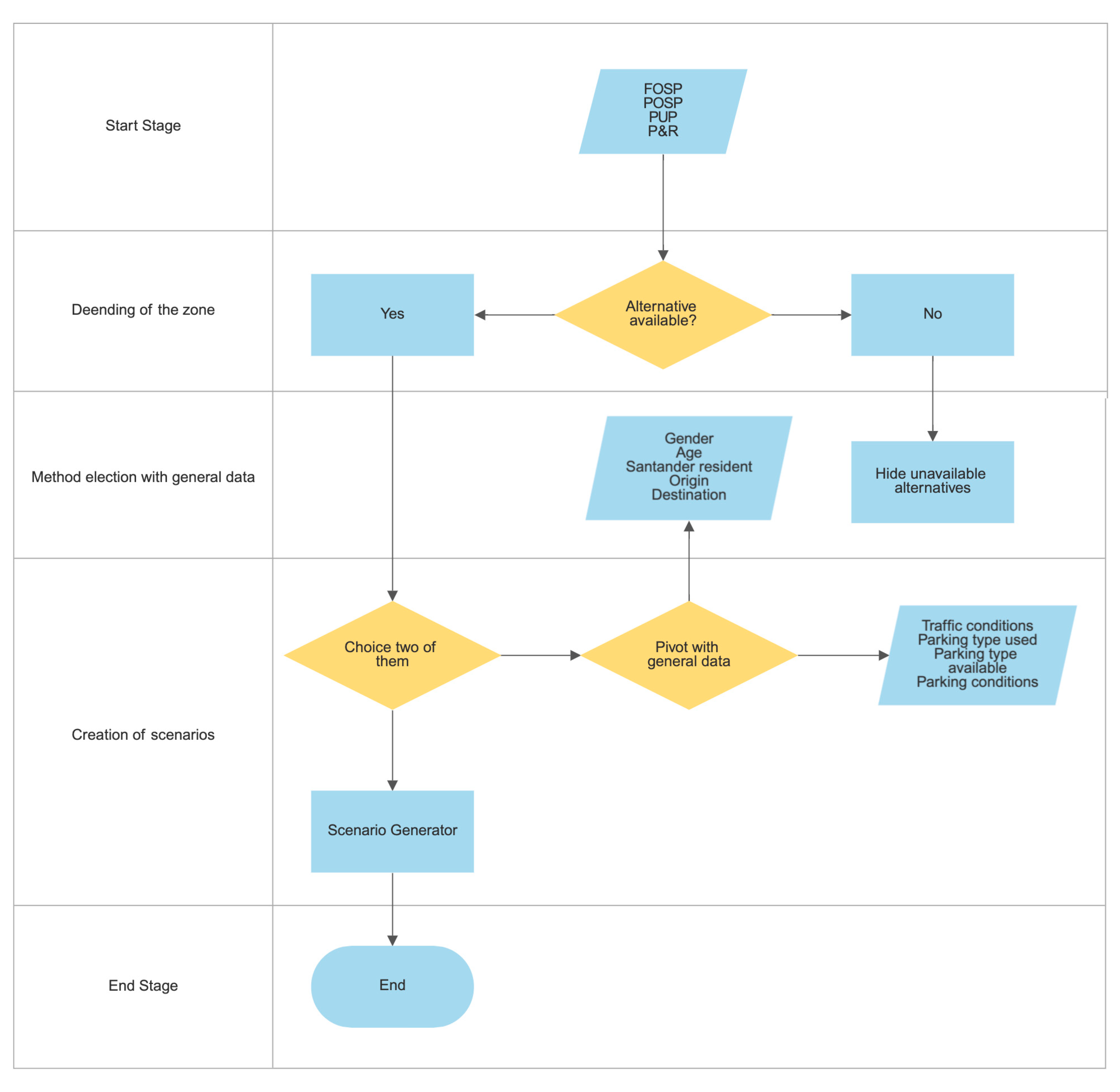
3.2. Survey Design
3.3. Efficient Design
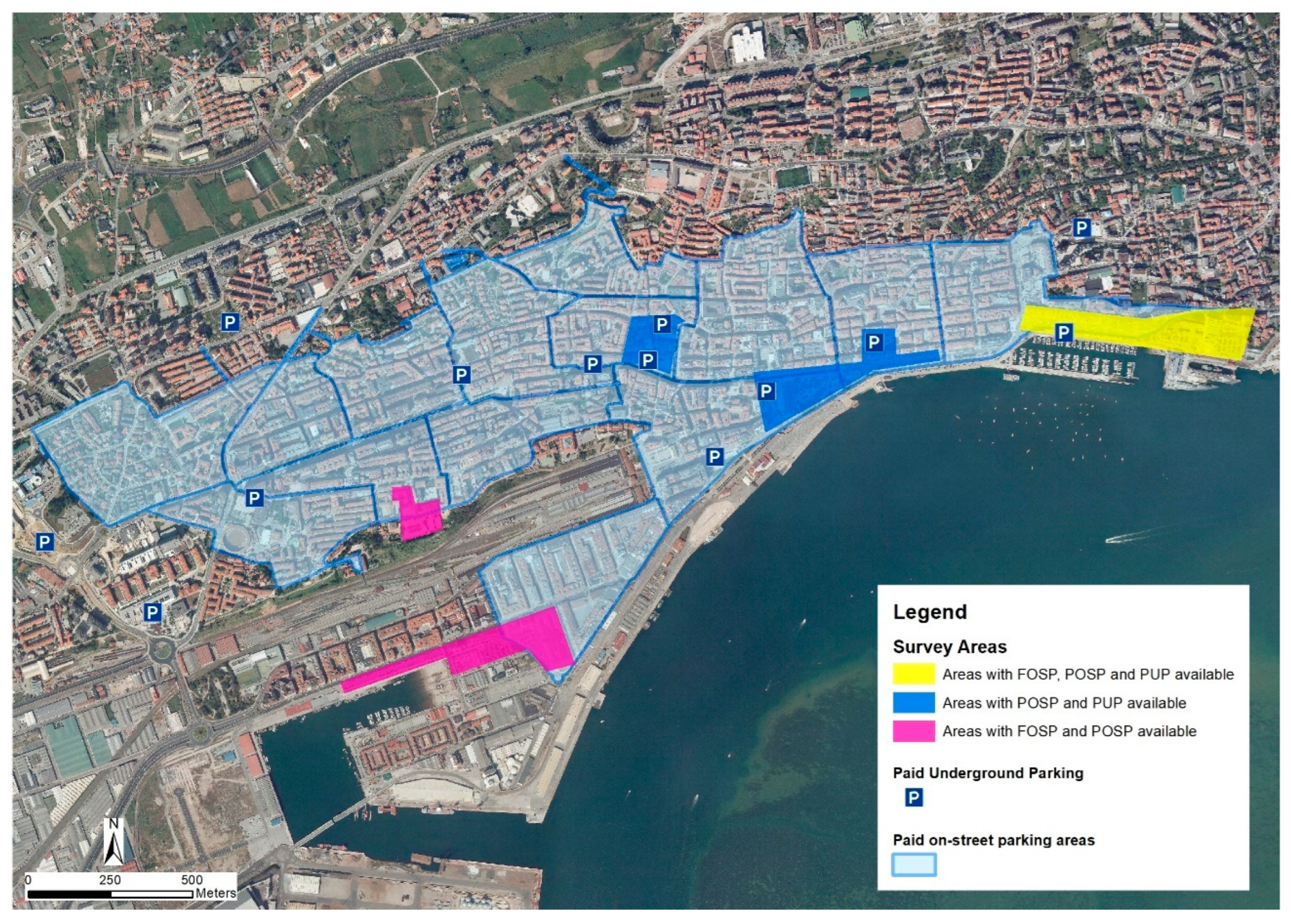
- Free on-street parking (FOSP)
- Paid on-street parking (POSP)
- Paid underground parking (PUP)
- Park and Ride (P&R)
- The designed SP survey contained the following choice variables;
- Parking fee (FEE): the price paid for parking, present in the parking alternatives of paid street parking, paid underground parking, and park and ride;
- Time spent in the car park (TE): the time that the car is parked in the car park;
- Time to destination (TD): the time taken to travel from the parking place to the destination of the drivers;
- Parking search time (PST): the time to find somewhere to park once they have reached their destination area;
- Maximum allowed parking time (MAPT): the maximum allowed parking time present in paid street parking and park-and-ride alternatives;
- The arrival time depends on the desired time (EA, LA): a variable introduced into the experiment to represent the cases of an early arrival (EA) or late arrival (LA);
- Available information about the park-and-ride alternative (INFO): variable of information about the characteristics of the park-and-ride installation, if there are available parking slots (AVAI) or if the car park is full (FULL).
3.4. Pilot and Definitive Surveys
4. Estimated Discrete Choice Models
- The following variables were found to be significant and presented the expected sign in the estimated models;
- : Specific constant for the alternative FOSP;
- : Specific constant for the alternative POSP;
- : Specific constant for the alternative PUP;
- : Specific constant for the alternative P&R;
- : Parking fare, specific parameter for each alternative;
- : Cruising time for parking, specific parameter for the alternatives FOSP and POSP;
- : Walking time to the destination from parking space, specific parameter for each alternative;
- : Maximum allowed parking time, specific parameter for the alternatives POSP and P&R;
- : Dummy variable relative to the age of the vehicle (equals 1 if the vehicle is under three years and 0 in other cases);
- TE: Dummy variable associated with parking duration (equals 1 for longer than 6 h and 0 in other cases);
- : Annual permit for parking in the area of POSP where his home is located;
- : Variable indicative of the scenario representing the case of arriving later than the desired time;
- : Variable indicative of the scenario representing the case of arriving earlier than the desired time;
- : Variable for trips with a health purpose;
- : Variable for trips with a work purpose;
- : Interaction of the socioeconomic variable, resident in the study area, and the fare associated with the parking alternative PUP;
- : Interaction of the socioeconomic variable, a trip of work purpose, and the fare associated with the parking alternative POSP;
- : Interaction of the trip variables parking duration and cruising time for parking for the parking alternative FOSP.
5. Findings on Parking Choice Behaviour
6. Discussion of Simulation of Different Scenarios
- Scenario 1: This parking scenario involves a 100% increase in the destination time for the free on-street parking (FOSP) alternative. This means that the time it takes for someone to reach their destination after parking is doubled in this scenario. This could represent an increased distance from parking spaces to the destination given that some free parking spaces are removed;
- Scenario 2: Building on Scenario 1, this scenario also includes a 50% increase in the parking fee for the paid on-street parking (POSP) alternative. This means that the cost of using paid on-street parking options is increased by half, making this option more expensive for users;
- Scenario 3: This scenario adds to Scenario 2 by introducing a 50% increase in the parking fee for the paid underground parking (PUP) alternative. Thus, in this scenario, both paid on-street parking and paid underground parking become more expensive by 50%;
- Scenario 4: This scenario starts with the changes made in Scenario 1 (i.e., a 100% increase in the destination time for FOSP) and then adds a 75% increase in the parking fees for both POSP and PUP. This represents a significant increase in the cost of both paid on-street and underground parking options;
- Scenario 5: This final scenario builds on Scenario 4 but also includes a 25% decrease in the fee for the park and ride (P&R) alternative. This means that in addition to the changes in the previous scenarios, the cost of using the park-and-ride option is reduced by a quarter, making this option more attractive for users.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shoup, D.C. The trouble with minimum parking requirements. Transp. Res. Part A Policy Pract. 1999, 33, 549–574. [Google Scholar] [CrossRef]
- Shoup, D. The High Cost of Free Parking: Updated Edition; Routledge: London, UK, 2017. [Google Scholar]
- Azari, K.A.; Arintono, S.; Hamid, H.; Rahmat, R.A.O. Modelling demand under parking and cordon pricing policy. Transp. Policy 2013, 25, 1–9. [Google Scholar] [CrossRef]
- Chang, F.; Xie, B.; Wang, Z. Simulation study of parking choice behavior based on multi-agent. J. Wuhan Univ. Technol. (Transp. Sci. Eng.) 2012, 36, 1283–1287. [Google Scholar]
- Pierce, G.; Shoup, D. Getting the Prices Right. J. Am. Plan. Assoc. 2013, 79, 67–81. [Google Scholar] [CrossRef]
- Dell’Olio, L.; Ibeas, A.; Moura, J.L. Paying for parking: Improving stated-preference surveys. In Proceedings of the Institution of Civil Engineers-Transport; ICE Publishing: London, UK, 2009; pp. 39–45. [Google Scholar]
- Shoup, D.C. Cruising for parking. Transp. Policy 2006, 13, 479–486. [Google Scholar] [CrossRef]
- Barham, S.; Bejcek, B.; Pundle, A.; Stus, O.; Vlah, M. Can Traffic Sensors Detect Vehicle Cruising? Report. Data Science for Social Good Project 2017. Available online: https://escience.washington.edu/wp-content/uploads/2018/2001/Traffic-Cruising-Summary.pdf (accessed on 10 November 2022).
- Kong, C.; Jovanovic, R.; Bayram, I.S.; Devetsikiotis, M. A Hierarchical Optimization Model for a Network of Electric Vehicle Charging Stations. Energies 2017, 10, 675. [Google Scholar] [CrossRef]
- Boucetta, M.; Hossain, N.U.I.; Jaradat, R.; Keating, C.; Tazzit, S.; Nagahi, M. The Architecture Design of Electrical Vehicle Infrastructure Using Viable System Model Approach. Systems 2021, 9, 19. [Google Scholar] [CrossRef]
- Wei, W.; Gu, C.; Yang, C. Examining the Influence of Moral Norms on Dockless Shared Bicycle Users’ Parking Behavior—An Exploratory Study Based on the Theory of Planned Behavior. Systems 2022, 10, 11. [Google Scholar] [CrossRef]
- ITE. Parking Generation; Institute of Transportation Engineers: Washington, DC, USA, 2004. [Google Scholar]
- ITE. Parking Generation; Institute of Transportation Engineers: Washington, DC, USA, 2010. [Google Scholar]
- Clifton, K.J.; Currans, K.M.; Muhs, C.D. Adjusting ITE’s Trip Generation Handbook for urban context. J. Transp. Land Use 2015, 8, 5–29. [Google Scholar] [CrossRef]
- Handy, S.L. Trip generation: Introduction to the special section. J. Transp. Land Use 2015, 8, 1–4. [Google Scholar] [CrossRef]
- Ibeas, A.; Cordera, R.; Dell’olio, L.; Moura, J.L. Modelling demand in restricted parking zones. Transp. Res. Part A Policy Pract. 2011, 45, 485–498. [Google Scholar] [CrossRef]
- Anselin, L.; Rey, S.J. Modern Spatial Econometrics in Practice: A Guide to GeoDa, GeoDaSpace and PySAL; GeoDa Press LLC: Chicago, IL, USA, 2014. [Google Scholar]
- Axhausen, K.W.; Polak, J.W. Choice of parking: Stated preference approach. Transportation 1991, 18, 59–81. [Google Scholar] [CrossRef]
- Hensher, D.; King, J. Parking demand and responsiveness to supply, pricing and location in the Sydney central business district. Transp. Res. Part A Policy Pract. 2001, 35, 177–196. [Google Scholar] [CrossRef]
- Coppola, P. A Joint Model of Mode/Parking Choice with Elastic Parking Demand. In Transportation Planning; Springer: Boston, MA, USA, 2006; pp. 85–104. [Google Scholar] [CrossRef]
- Dell’olio, L.; Cordera, R.; Ibeas, A.; Barreda, R.; Alonso, B.; Moura, J.L. A methodology based on parking policy to promote sustainable mobility in college campuses. Transp. Policy 2019, 80, 148–156. [Google Scholar] [CrossRef]
- Khaliq, A.; van der Waerden, P.; Janssens, D.; Wets, G. A Conceptual Framework for Forecasting Car Driver’s On-Street Parking Decisions. Transp. Res. Procedia 2019, 37, 131–138. [Google Scholar] [CrossRef]
- Wang, H.; Li, R.; Wang, X.; Shang, P. Effect of on-street parking pricing policies on parking characteristics: A case study of Nanning. Transp. Res. Part A Policy Pract. 2020, 137, 65–78. [Google Scholar] [CrossRef]
- Lehner, S.; Peer, S. The price elasticity of parking: A meta-analysis. Transp. Res. Part A Policy Pract. 2019, 121, 177–191. [Google Scholar] [CrossRef]
- Kuppam, A.R.; Pendyala, R.; Gollakoti, M.A.V. Stated Response Analysis of the Effectiveness of Parking Pricing Strategies for Transportation Control. Transp. Financ. Econ. Manag. 1998, 1649, 39–46. [Google Scholar] [CrossRef]
- Bianco, M.J. Effective Transportation Demand Management: Combining Parking Pricing, Transit Incentives, and Transportation Management in a Commercial District of Portland, Oregon. Transp. Res. Rec. J. Transp. Res. Board 2000, 1711, 46–54. [Google Scholar] [CrossRef]
- Shiftan, Y.; Burd-Eden, R. Modeling Response to Parking Policy. Transp. Res. Rec. J. Transp. Res. Board 2001, 1765, 27–34. [Google Scholar] [CrossRef]
- Kelly, J.A.; Clinch, J.P. Influence of varied parking tariffs on parking occupancy levels by trip purpose. Transp. Policy 2006, 13, 487–495. [Google Scholar] [CrossRef]
- Sattayhatewa, P.; Smith, R.L. Development of Parking Choice Models for Special Events. Transp. Res. Rec. J. Transp. Res. Board 2003, 1858, 31–38. [Google Scholar] [CrossRef]
- Hess, S.; Polak, J. Mixed Logit Modelling of Parking Type Choice Behaviour. Transportation Statistics; JD Ross Publishing: London, UK, 2009; pp. 77–102. [Google Scholar]
- Chaniotakis, E.; Pel, A.J. Drivers’ parking location choice under uncertain parking availability and search times: A stated preference experiment. Transp. Res. Part A Policy Pract. 2015, 82, 228–239. [Google Scholar] [CrossRef]
- Hess, S.; Polak, J.W. Mixed Logit estimation of parking type choice. In Proceedings of the 83rd Annual Meeting of the Transportation Research Board, Washington, DC, USA, 11–15 January 2004; pp. 1–23. [Google Scholar]
- Dell’Orco, M.; Ottomanelli, M.; Sassanelli, D. Modelling uncertainty in parking choice behaviour. In Proceedings of the 82nd Annual Meeting of the Transportation Research Board, Washington, DC, USA, 12–16 January 2003. [Google Scholar]
- Ruisong, Y.; Meiping, Y.; Xiaoguang, Y. Study on driver’s parking location choice behavior considering drivers’ information acquisition. In Proceedings of the 2009 Second International Conference on Intelligent Computation Technology and Automation, Changsha, China, 10–11 October 2009; pp. 764–770. [Google Scholar]
- Zong, F.; Yu, P.; Tang, J.; Sun, X. Understanding parking decisions with structural equation modeling. Phys. A Stat. Mech. Appl. 2019, 523, 408–417. [Google Scholar] [CrossRef]
- Van der Waerden, P. Pamela, a Parking Analysis Model for Predicting Effects in Local Areas. Ph.D. Thesis, Eindhoven University of Technology, Eindhoven, The Netherlands, 9 October 2012. [Google Scholar]
- Ibeas, A.; Dell’olio, L.; Montequín, R.B. Citizen involvement in promoting sustainable mobility. J. Transp. Geogr. 2011, 19, 475–487. [Google Scholar] [CrossRef]
- Rose, J.M.; Bliemer, M.C.J. Constructing Efficient Stated Choice Experimental Designs. Transp. Rev. 2009, 29, 587–617. [Google Scholar] [CrossRef]
- San Martín, G.A.; Berodia, J.L.M.; Portilla, Á.I. Modelo de comportamiento del usuario en la búsqueda de aparcamiento. Ing. Transp. 2016, 19, 50–75. [Google Scholar]
- ChoiceMetrics. Ngene 1.1. 1 User Manual & Reference Guide; ChoiceMetrics: Sydney, Australia, 2012; Volume 19, p. 20. [Google Scholar]
- Greene, W. Nlogit. Student Reference Guide; Econometric Software, Inc.: Plainview, NY, USA, 2012; Volume 11. [Google Scholar]
- Mishra, P.; Singh, U.; Pandey, C.M.; Mishra, P.; Pandey, G. Application of student’s t-test, analysis of variance, and covariance. Ann. Card. Anaesth. 2019, 22, 407. [Google Scholar] [CrossRef]
- Sillano, M.; Ortúzar, J.D.D. Willingness-to-Pay Estimation with Mixed Logit Models: Some New Evidence. Environ. Plan. A Econ. Space 2005, 37, 525–550. [Google Scholar] [CrossRef]
- Greene, W.H. Nlogit 6 Software; Econometric Software, Inc.: Plainview, NY, USA, 2016. [Google Scholar]
- Anderson, C.M.; Das, C.; Tyrrell, T.J. Parking preferences among tourists in Newport, Rhode Island. Transp. Res. Part A Policy Pract. 2006, 40, 334–353. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Alternative | Survey Scenario | FOSP | POSP | PUP | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| FOSP | POSP | PUP | P&R | FOSP | POSP | PUP | P&R | FOSP | POSP | PUP | P&R | ||
| FEE (€) | 1 | 0 | 1.2·TE | 1.5·TE | 3.00 | 0 | TE | 1.5·TE | 3.00 | 0 | 1.2·TE | TE | 3.00 |
| 2 | 0.9·TE | 1.2·TE | 2.50 | 1.2·TE | 2.50 | 0.9·TE | 2.50 | ||||||
| 3 | 0.6·TE | 0.9·TE | 2.00 | 0.9·TE | 2.00 | 0.6·TE | 2.00 | ||||||
| 4 | 0.3·TE | 0.6·TE | 1.50 | 0.6·TE | 1.50 | 0.3·TE | 1.50 | ||||||
| SEARCHING + WAITING TIMES (P&R) (minutes) | 1 | PST | 0 | 0 | PST | PST | 0 | PST | 0 | 0 | |||
| 2 | 0.25·PST | 2 | 2·PST | 2 | 2·PST | 0.25·PST | 2 | ||||||
| 3 | 0.50·PST | 4 | 3·PST | 4 | 3·PST | 0.50·PST | 4 | ||||||
| 4 | PST | 8 | 4·PST | 8 | 4·PST | PST | 8 | ||||||
| TIME TO DESTINATION (minutes) | 1 | TD | 0 | 0 | 0 | TD | PST | 0 | 0 | TD | 0 | TD | 0 |
| 2 | 0.25·TD | 0.25·TD | 0.25·TD | 1.5·TD | 0.50·TD | 0.50·TD | 1.5·TD | 0.50·TD | 0.50·TD | ||||
| 3 | 0.50·TD | 0.50·TD | 0.50·TD | 2·TD | TD | TD | 2·TD | TD | TD | ||||
| 4 | TD | TD | TD | 2.5·TD | 1.5·TD | 1.5·TD | 2.5·TD | 1.5·TD | 1.5·TD | ||||
| MAXIMUM ALLOWED PARKING TIME (hours) | 1 | no limit | 1 | no limit | 4 | no limit | 1 | no limit | 4 | no limit | 1 | no limit | 4 |
| 2 | 2 | 8 | 2 | 8 | 2 | 8 | |||||||
| 3 | 4 | 12 | 4 | 12 | 4 | 12 | |||||||
| 4 | 8 | 24 | 8 | 24 | 8 | 24 | |||||||
| INFORMATION | AVAI. | AVAI. | AVAI. | ||||||||||
| FULL. | FULL. | FULL. | |||||||||||
| ARRIVAL TIME COMPARED TO EXPECTED (minutes) | −15 | ||||||||||||
| −5 | |||||||||||||
| 0 | |||||||||||||
| 5 | |||||||||||||
| 15 | |||||||||||||
| Composition of the Sample. | ||||
|---|---|---|---|---|
| All Users | Users of FOSP | Users of POSP | Users of PUP | |
| Gender | ||||
| Male | 58% | 63% | 49% | 58% |
| Female | 42% | 37% | 51% | 42% |
| Age | ||||
| <24 | 14% | 20% | 9% | 10% |
| 25–34 | 18% | 16% | 25% | 15% |
| 35–44 | 27% | 28% | 26% | 28% |
| 45–54 | 19% | 16% | 17% | 25% |
| 55–64 | 13% | 13% | 14% | 12% |
| >65 | 8% | 6% | 9% | 10% |
| Place of residence | ||||
| Santander | 46% | 46% | 66% | 52% |
| Outside Santander | 54% | 54% | 34% | 48% |
| Income level | ||||
| <900 € | 25% | 29% | 18% | 25% |
| 900–1500 € | 23% | 17% | 25% | 30% |
| 1500–2500 € | 20% | 21% | 17% | 22% |
| >2500 € | 3% | 1% | 2% | 7% |
| No Response | 30% | 32% | 38% | 17% |
| Sample size | 223 | 98 | 65 | 60 |
| Variable Name (Alternative) | Parameter (Alternative) | Multinomial Logit Model (MNL) | Mixed Logit with Panel Effects (ML) | Error Component Mixed Logit with Panel Effect (ECML) | |||
|---|---|---|---|---|---|---|---|
| Estimate | t-Test | Estimate | t-Test | Estimate | t-Test | ||
| Random parameters in the utility function | |||||||
| Fee (POSP) | - | - | −0.719 | −5.79 | −0.717 | −4.88 | |
| Fee (PUP) | - | - | −0.551 | −3.87 | −0.495 | −2.55 | |
| Parking Search Time (FOSP) | - | - | −0.133 | −5.61 | −0.135 | −5.78 | |
| Non-random parameters in the utility function | |||||||
| Parking Search Time (FOSP) | −0.037 | −8.51 | - | - | - | - | |
| Time to destination (FOSP) | −0.051 | −4.42 | −0.112 | −4.74 | −0.113 | −4.75 | |
| Specific Constant (POSP) | −1.159 | −6.36 | −2.227 | −7.01 | −2.472 | −6.54 | |
| Fee (POSP) | −0.313 | −7.51 | - | - | - | - | |
| Annual parking permit (POSP) | 0.750 | 3.14 | - | - | - | - | |
| Parking Search Time (POSP) | −0.047 | −5.99 | −0.073 | −6.03 | −0.084 | −5.71 | |
| Maximum allowed time (POSP) | 0.063 | 2.84 | 0.103 | 3.64 | 0.114 | 4.14 | |
| Specific Constant (PUP) | −1.137 | −5.19 | −1.589 | −4.44 | −1.747 | −3.74 | |
| Fee (PUP) | −0.277 | −4.60 | - | - | - | - | |
| Vehicle age < three years (PUP) | 0.519 | 2.79 | - | - | - | - | |
| Time to destination (PUP) | −0.059 | −2.83 | −0.141 | −4.55 | −0.153 | −3.41 | |
| Arrive late (PUP) | 0.041 | 3.22 | 0.067 | 4.31 | 0.076 | 4.71 | |
| Specific Constant (P&R) | −1.033 | −2.25 | −2.366 | −4.02 | −2.522 | −2.91 | |
| Fee (P&R) | −0.488 | −2.65 | −0.521 | −2.43 | −0.754 | −2.56 | |
| Time to destination (P&R) | −0.068 | −2.38 | −0.087 | −2.69 | −0.086 | −1.91 | |
| Parking duration > 6 h (P&R) | 0.690 | 2.41 | 1.711 | 3.52 | 1.517 | 1.41 | |
| Arrive early (P&R) | 0.039 | 2.23 | 0.051 | 2.46 | 0.054 | 2.39 | |
| Health purpose (POSP and PUP) | 0.671 | 3.02 | 0.894 | 2.29 | 0.869 | 1.50 | |
| Work purpose (P&R) | 0.027 | 0.13 | 0.459 | 1.44 | 0.889 | 1.62 | |
| Interactions of random parameters with socioeconomic variables | |||||||
| Interaction Work purpose and Fee (POSP) | - | - | 0.263 | 1.88 | 0.333 | 2.05 | |
| Interaction Resident and Fee (PUP) | - | - | −0.570 | −2.54 | −0.533 | −2.22 | |
| Interaction Parking Search Time and Parking Duration (FOSP) | - | - | 0.000 | 3.14 | 0.000 | 2.07 | |
| Deviation of the distributions of the random parameters | |||||||
| Deviation of the distributions of the random parameters (Normal Distribution) | Sigma FEE(POSP) (N) | - | - | 0.359 | 2.99 | 0.408 | 3.05 |
| Sigma FEE(PUP) (N) | - | - | 0.917 | 5.50 | 0.542 | 3.27 | |
| Sigma PST(FOSP) (N) | - | - | 0.139 | 6.45 | 0.091 | 6.10 | |
| Deviation of the random latent effects | |||||||
| Deviation of the random latent effects | Sigma (FOSP, POSP) | - | - | - | - | 0.600 | 2.75 |
| Sigma (POSP, PUP) | - | - | - | - | 0.431 | 2.59 | |
| Sigma (P&R) | - | - | - | - | 2.246 | 3.79 | |
| Log-likelihood | −1208.53 | −1044.77 | −1004.45 | ||||
| 0.188 | 0.298 | 0.325 | |||||
| 0.098 | 0.220 | 0.250 | |||||
| Log-likelihood (Constants only) | −1339.50 | ||||||
| Attribute (Alternative) | FOSP | POSP | PUP | P&R |
|---|---|---|---|---|
| −0.2440 | 0.2793 | 0.0425 | 0.2530 | |
| −0.1519 | 0.1524 | 0.0401 | 0.1912 | |
| 0.0798 | −0.2092 | 0.0757 | 0.0629 | |
| 0.0503 | −0.2057 | 0.1331 | 0.0508 | |
| −0.0469 | 0.1344 | −0.0600 | −0.0330 | |
| −0.0097 | 0.0281 | −0.0124 | −0.0079 | |
| 0.0174 | 0.1125 | −0.2083 | 0.1039 | |
| 0.0113 | 0.0949 | −0.1744 | 0.1020 | |
| −0.0091 | −0.0523 | 0.0969 | −0.0430 | |
| 0 | −0.0103 | 0.0165 | −0.0111 | |
| 0.0557 | 0.0434 | 0.0640 | −0.6146 | |
| 0.0131 | 0.0075 | 0.0156 | −0.1369 | |
| −0.0146 | 0 | 0 | 0.0773 | |
| 0.0068 | 0.0059 | 0.0100 | −0.0830 | |
| −0.0139 | −0.0082 | −0.0057 | 0.1171 |
| Scenario | FOSP | POSP | PUP | P&R |
|---|---|---|---|---|
| 1. 100% increase in the destination time of FOSP alternative | −6.74% | +4.11% | +0.99% | +1.64% |
| 2. Scenario 1 + 50% increase in the fee of POSP alternative | −4.91% | +1.25% | +1.78% | +1.88% |
| 3. Scenario 2 + 50% increase in the fee of PUP alternative | −4.49% | +2.64% | −0.44% | +2.29% |
| 4. Scenario 1 + 75% increase in the fee of POSP and PUP alternatives | −3.56% | +2.15% | −1.21% | +2.62% |
| 5. Scenario 4 + 25% decrease in the fee of P&R alternative | −4.27% | +1.71% | −1.50% | +4.06% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodríguez, A.; dell’Olio, L.; Moura, J.L.; Alonso, B.; Cordera, R. Modelling Parking Choice Behaviour Considering Alternative Availability and Systematic and Random Variations in User Tastes. Sustainability 2023, 15, 8618. https://doi.org/10.3390/su15118618
Rodríguez A, dell’Olio L, Moura JL, Alonso B, Cordera R. Modelling Parking Choice Behaviour Considering Alternative Availability and Systematic and Random Variations in User Tastes. Sustainability. 2023; 15(11):8618. https://doi.org/10.3390/su15118618
Chicago/Turabian StyleRodríguez, Andrés, Luigi dell’Olio, José Luis Moura, Borja Alonso, and Rubén Cordera. 2023. "Modelling Parking Choice Behaviour Considering Alternative Availability and Systematic and Random Variations in User Tastes" Sustainability 15, no. 11: 8618. https://doi.org/10.3390/su15118618