

Design of a Fuzzy Adaptive Voltage Controller for a Nonlinear Polymer Electrolyte Membrane Fuel Cell with an Unknown Dynamical System


Abstract
:1. Introduction
2. Fuel Cell Concepts and Model
2.1. Operating Principle of the Fuel Cell
2.2. Open Circuit Voltage of PFMFCs
2.3. Fuel Cell Small-Signal Models
3. Adaptive Controller Design for PEMFCs
3.1. Design of the Proposed Adaptive Controller
3.2. Fuzzy Adaptive Controller Design for PEMFCs
3.3. Fuzzy Adaptive Controller Design
4. Simulation Confirmation
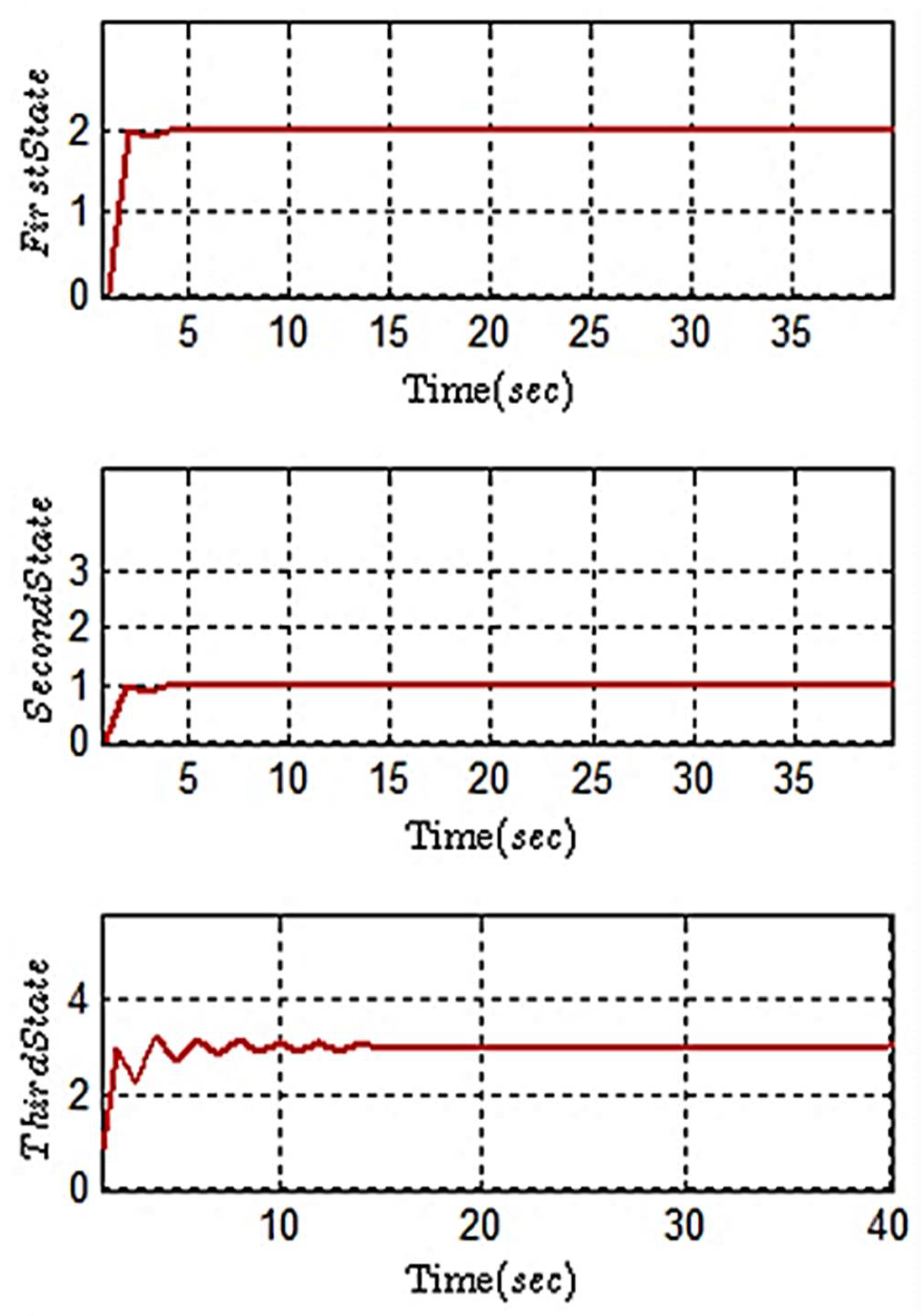
4.1. Adaptive Controller Simulations
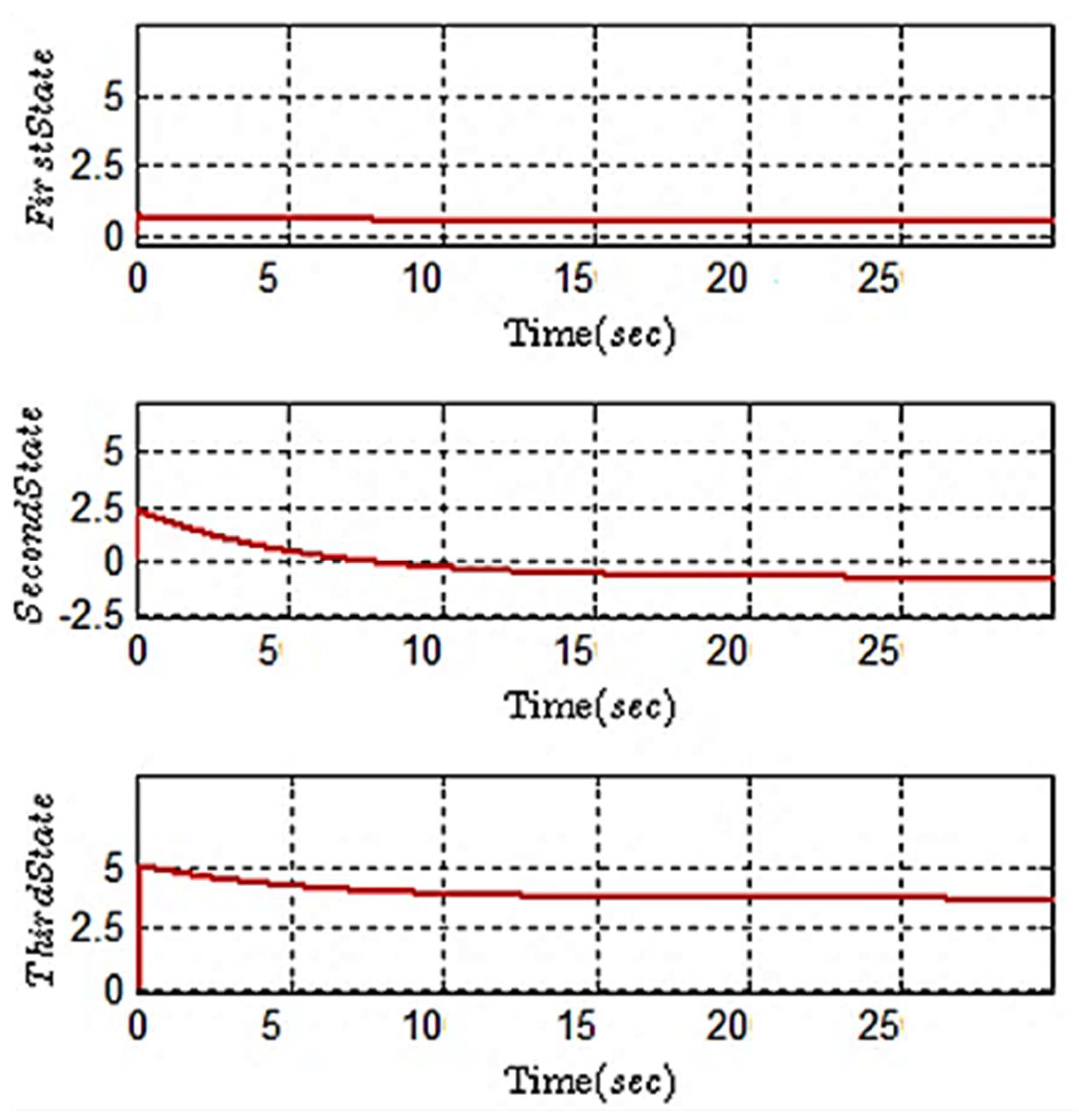
4.2. Fuzzy Adaptive Controller Simulations
- In both presented methods, convergence of the tracking error to zero is guaranteed.
- The closed-loop system’s stability is guaranteed in the presence of dynamic uncertainty.
- The fuzzy adaptive controller outperforms the adaptive controller in terms of tracking errors in the presence of uncertainties and disturbances.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Itoh, J.I.; Hayashi, F. Ripple Current Reduction of a Fuel Cell for a Single-Phase Isolated Converter Using a DC Active Filter with a Center Tap. IEEE Trans. Power Electron. 2010, 25, 550–556. [Google Scholar] [CrossRef]
- Sedighi, M.; Mohammadi, M.; Fard, S.F. The Nexus between Stock Returns of Oil Companies and Oil Price Fluctuations after Heavy Oil Upgrading: Toward Theoretical Progress. Economies 2019, 7, 71. [Google Scholar] [CrossRef]
- Logan, B.E. Scaling up Microbial Fuel Cells and Other Bio-electrochemical Systems. Appl. Microbiol. Biotechnol. 2010, 85, 1665–1671. [Google Scholar] [CrossRef] [PubMed]
- Mohammadi, M.; Sedighi, M.; Natarajan, R.; Hassan, S.H.A.; Ghasemi, M. Microbial fuel cell for oilfield produced water treatment and reuse: Modelling and process optimization. Korean J. Chem. Eng. 2021, 38, 72. [Google Scholar] [CrossRef]
- Sedighi, M.; Aljlil, S.A.; Alsubei, M.D.; Ghasemi, M.; Mohammadi, M. Performance optimisation of microbial fuel cell for wastewater treatment and sustainable clean energy generation using response surface methodology. Alex. Eng. J. 2018, 57, 4243. [Google Scholar] [CrossRef]
- Larminie, J.; Dicks, A.; McDonald, M.S. Fuel Cell Systems Explained; John Wiley and Sons Ltd.: Chichester, UK, 2003. [Google Scholar]
- Wang, C.; Nehrir, M.; Gao, H. Control of PEM Fuel Cell Distributed Generation Systems. IEEE Trans. Energy Convers. 2006, 21, 586. [Google Scholar] [CrossRef]
- Rakhtala, S.; Roudbari, E.S. Fuzzy PID Control of a Stand-Alone System Based on PEM Fuel Cell. Int. J. Electr. Power Energy Syst. 2016, 78, 576. [Google Scholar] [CrossRef]
- Ghasemi, R.; Menhaj, M.; Afshar, A. A Decentralized Stable Fuzzy Adaptive Controller for Large Scale Nonlinear Systems. J. Appl. Sci. 2009, 9, 892. [Google Scholar] [CrossRef]
- Ghasemi, R.; Menhaj, M.B.; Afshar, A. A New Decentralized Fuzzy Model Reference Adaptive Controller for a Class of Large-scale Nonaffine Nonlinear Systems. Eur. J. Control 2009, 15, 534. [Google Scholar] [CrossRef]
- Derbeli, M.; Saadi, W.; Napole, C.; Barambones, O. High order sliding mode based drift algorithm for a commercial PEM fuel cell system. IET Renew. Power Gener. 2023, 17, 260–270. [Google Scholar] [CrossRef]
- Aguilar, J.A.; Andrade-Cetto, J.; Husar, A. Control-oriented estimation of the exchange current density in PEM fuel cells via stochastic filtering. Int. J. Energy Res. 2022, 46, 22516–22529. [Google Scholar] [CrossRef]
- Afsharinejad, A.; Asemani, M.H.; Dehghani, M.; Abolpour, R.; Vafamand, N. Optimal gain-scheduling control of proton exchange membrane fuel cell: An LMI approach. IET Renew. Power Gener. 2022, 16, 459–469. [Google Scholar] [CrossRef]
- Aryan Nezhad, M.; Bevrani, H. μ and H∞ optimization control based on optimal oxygen excess ratio for the Proton Exchange Membrane Fuel Cell (PEMFC). J. Ind. Manag. Optim. 2023, 19, 3913–3930. [Google Scholar] [CrossRef]
- Ghasemi, J.; Rakhtala, S.M.; Rasekhi, J.; Dokhtala, S.R. PEM fuel cell system to extend the stack life based on a PID-PSO controller design. Complex Eng. Syst. 2022, 2, 4. [Google Scholar] [CrossRef]
- Nebeluk, R.; Lawrynczuk, M. Fast Model Predictive Control of PEM Fuel Cell System Using the L1 Norm. Energies 2022, 15, 5157. [Google Scholar] [CrossRef]
- Trinh, H.A.; Truong, H.V.A.; Ahn, K.K. Development of Fuzzy-Adaptive Control Based Energy Management Strategy for PEM Fuel Cell Hybrid Tramway System. Appl. Sci. 2022, 12, 3880. [Google Scholar] [CrossRef]
- AbouOmar, M.S.; Zhang, H.J.; Su, Y.X. Fractional Order Fuzzy PID Control of Automotive PEM Fuel Cell Air Feed System Using Neural Network Optimization Algorithm. Energies 2019, 12, 1435. [Google Scholar] [CrossRef]
- Phan, V.D.; Trinh, H.A.; Ahn, K.K. Design and evaluation of adaptive neural fuzzy-based pressure control for PEM fuel cell system. Energy Rep. 2022, 8, 12026–12037. [Google Scholar] [CrossRef]
- Chen, J.; Yao, W.; Lu, Q.; Duan, X.; Yang, B.; Zhu, F.; Cao, X.; Jiang, L. Robust nonlinear adaptive pressure control of polymer electrolyte membrane fuel cells considering sensor failures based on perturbation compensation. Energy Rep. 2022, 8, 8396–8412. [Google Scholar] [CrossRef]
- Han, F.; Tian, Y.; Zou, Q.; Zhang, X. Research on the Fault Diagnosis of a Polymer Electrolyte Membrane Fuel Cell System. Energies 2020, 13, 2531. [Google Scholar] [CrossRef]
- Park, G.; Gajic, Z. Sliding mode control of a linearized polymer electrolyte membrane fuel cell model. J. Power Sources 2012, 212, 226–232. [Google Scholar] [CrossRef]
- Younis, M.; Rahim, N.; Mekhilef, S. Dynamic and control of fuel cell system. In Proceedings of the 3rd IEEE Conference on Industrial Electronics and Applications, Singapore, 3–5 June 2008; p. 2063. [Google Scholar]
- Correa, J.M.; Farret, F.A.; Popov, V.A.; Simoes, M.G. Sensitivity Analysis of the Modeling Parameters Used in Simulation of Proton Exchange Membrane Fuel Cells. IEEE Trans. Energy Convers. 2005, 20, 211. [Google Scholar] [CrossRef]
- Pasricha, S.; Shaw, S.R. A Dynamic PEM Fuel Cell Model. IEEE Trans. Energy Convers. 2006, 21, 484. [Google Scholar] [CrossRef]
- Pasricha, S.; Keppler, M.; Shaw, S.R.; Nehrir, M.H. Comparison and Identification of Static Electrical Terminal Fuel Cell Models. IEEE Trans. Energy Convers. 2007, 22, 746. [Google Scholar] [CrossRef]
- Kim, H.-I.; Cho, C.Y.; Nam, J.H.; Shin, D.; Chung, T.-Y. A Simple Dynamic Model for Polymer Electrolyte Membrane Fuel Cell (PEMFC) Power Modules: Parameter Estimation and Model Prediction. Int. J. Hydrogen Energy 2010, 35, 3656. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 32 | 6.495 [cm3] | ||
| 338.5 [K] | 12.96 [cm3] | ||
| 40.28 [kPa] | 101 × 103 [Pa] | ||
| 19.28 [kPa] | 2 [A] | ||
| 10.28 [kPa] | 0.4 [A/m2] | ||
| 8.31 [J/K·mol] | 0.2 [A] | ||
| 96,439 [C/mol] | 0.2 [A] | ||
| 1 [A] | 0.0635 [Ω] | ||
| 1.6 [V] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghasemi, R.; Sedighi, M.; Ghasemi, M.; Sadat Ghazanfarpoor, B. Design of a Fuzzy Adaptive Voltage Controller for a Nonlinear Polymer Electrolyte Membrane Fuel Cell with an Unknown Dynamical System. Sustainability 2023, 15, 13609. https://doi.org/10.3390/su151813609
Ghasemi R, Sedighi M, Ghasemi M, Sadat Ghazanfarpoor B. Design of a Fuzzy Adaptive Voltage Controller for a Nonlinear Polymer Electrolyte Membrane Fuel Cell with an Unknown Dynamical System. Sustainability. 2023; 15(18):13609. https://doi.org/10.3390/su151813609
Chicago/Turabian StyleGhasemi, Reza, Mehdi Sedighi, Mostafa Ghasemi, and Bita Sadat Ghazanfarpoor. 2023. "Design of a Fuzzy Adaptive Voltage Controller for a Nonlinear Polymer Electrolyte Membrane Fuel Cell with an Unknown Dynamical System" Sustainability 15, no. 18: 13609. https://doi.org/10.3390/su151813609