
A Novel Brushless PM-Assisted DC Motor with Compound-Excited Circular Winding



Abstract
:1. Introduction
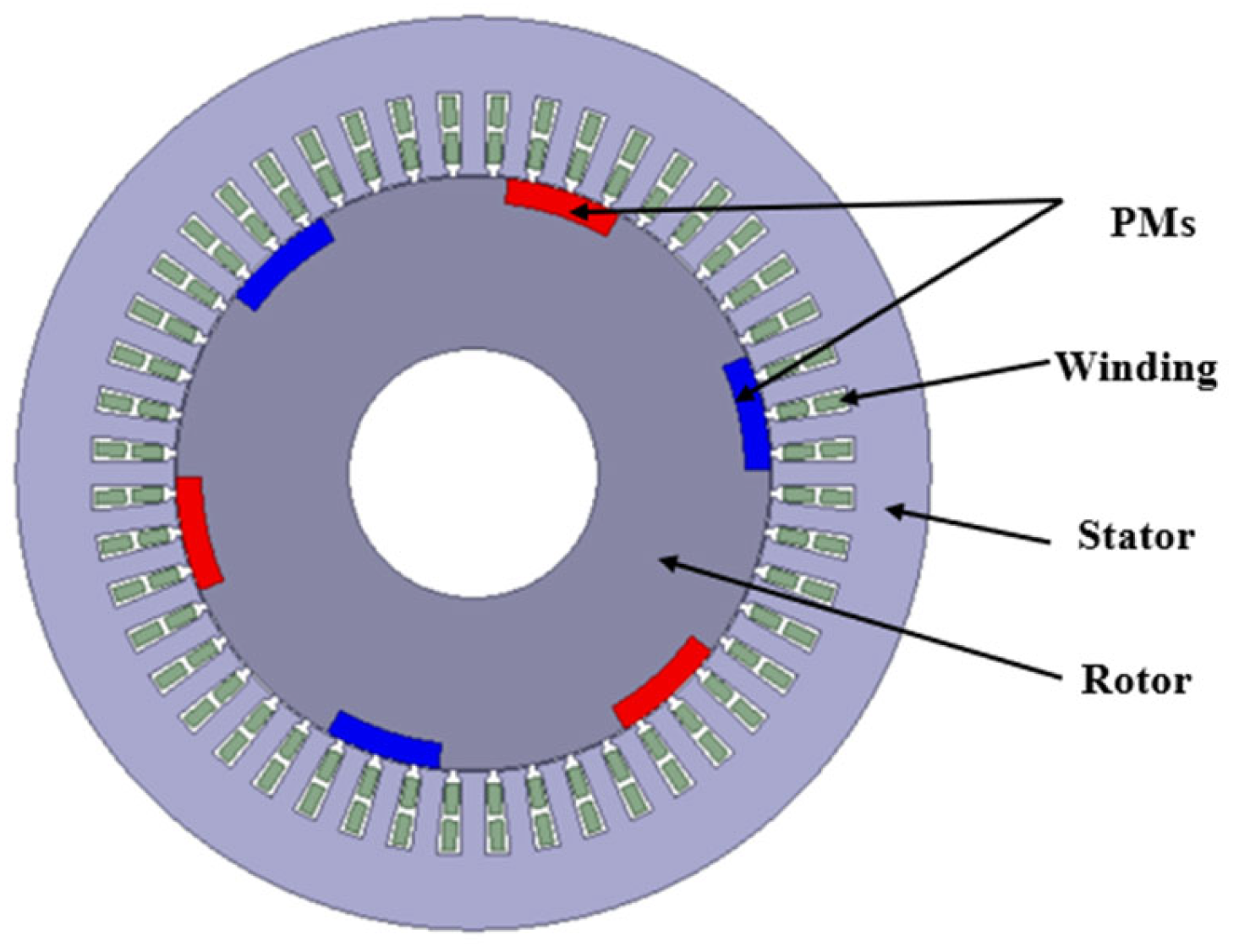
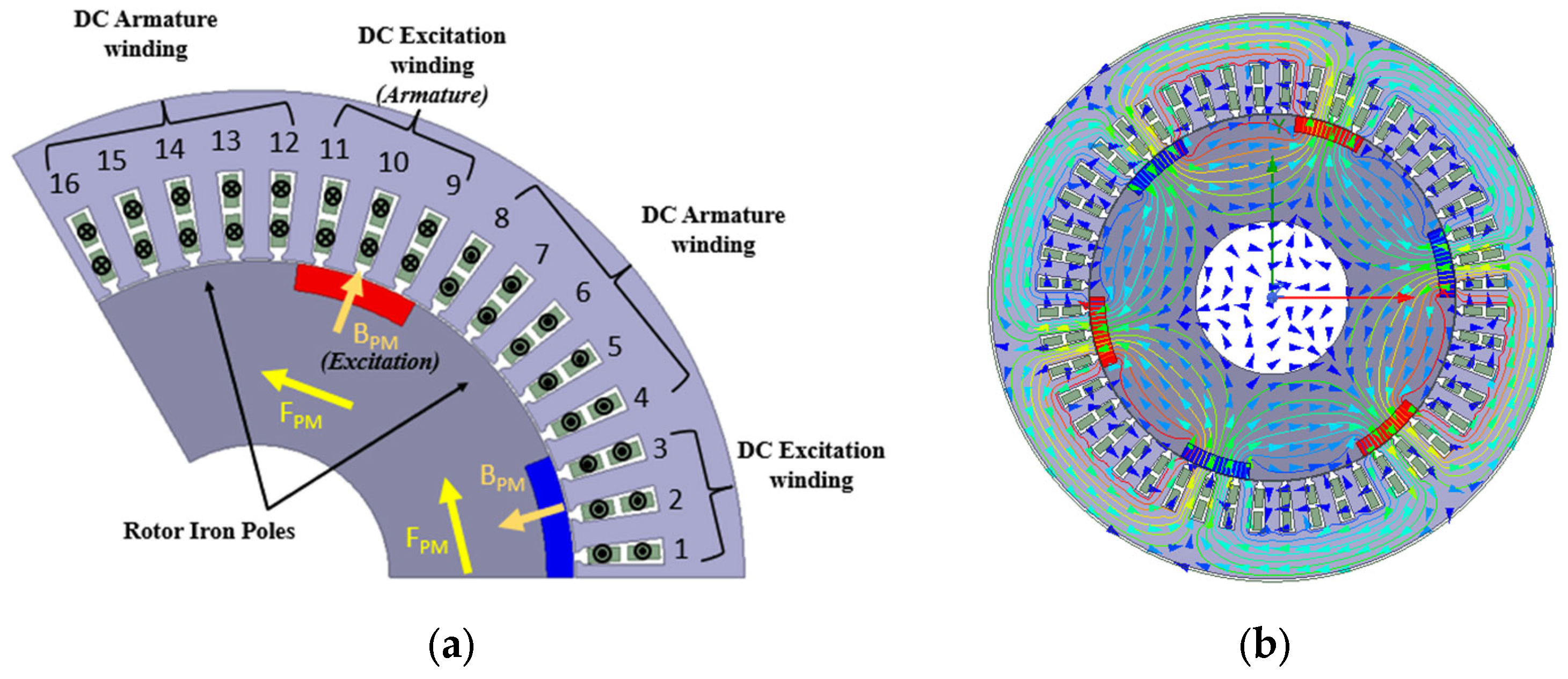
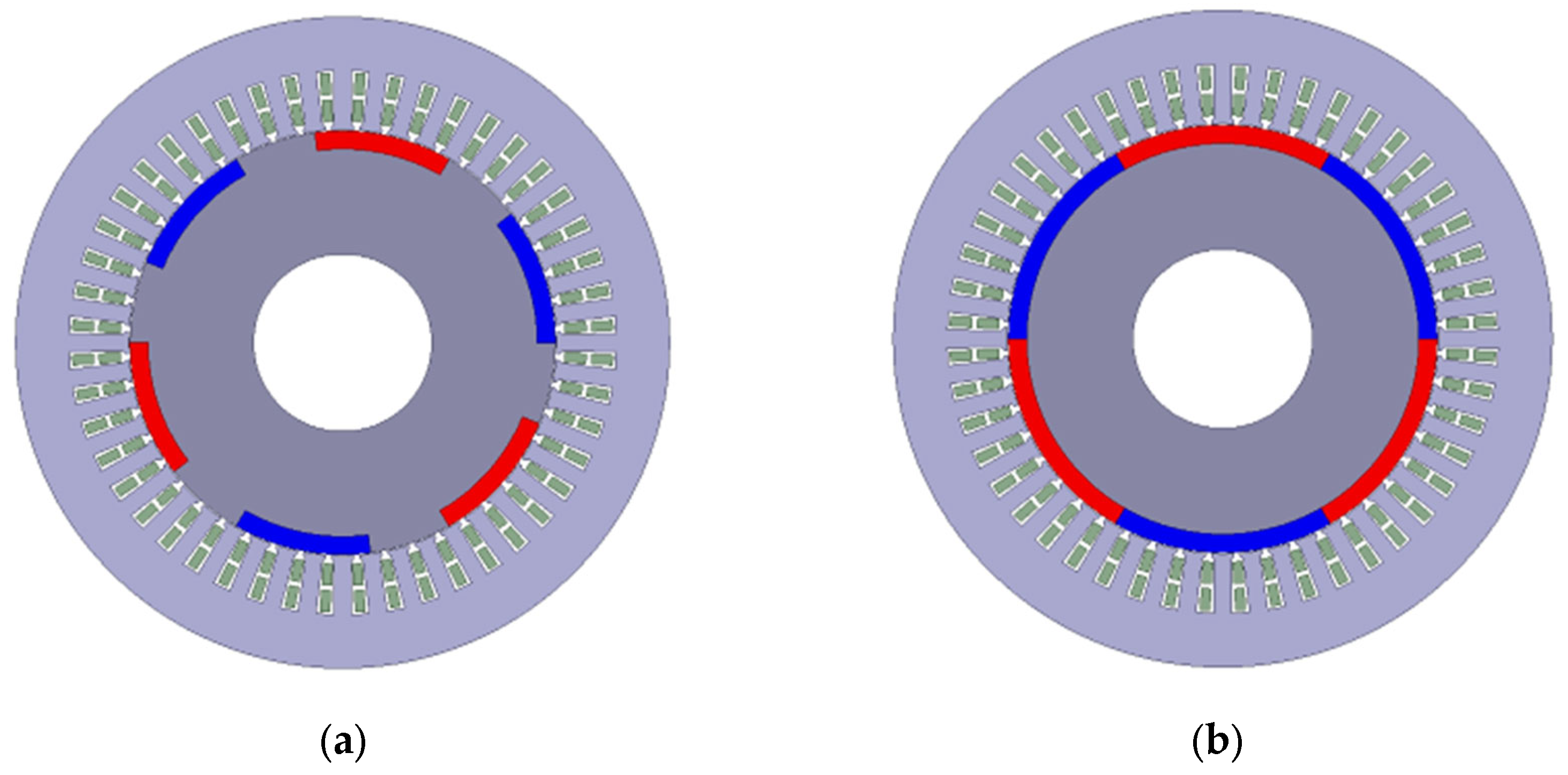
2. Machine Structure
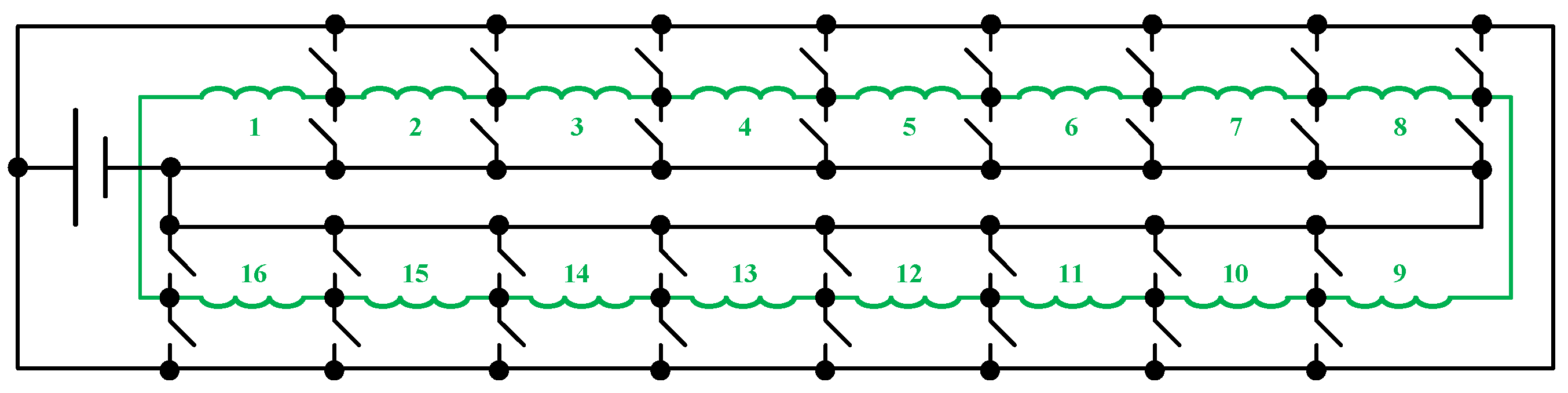
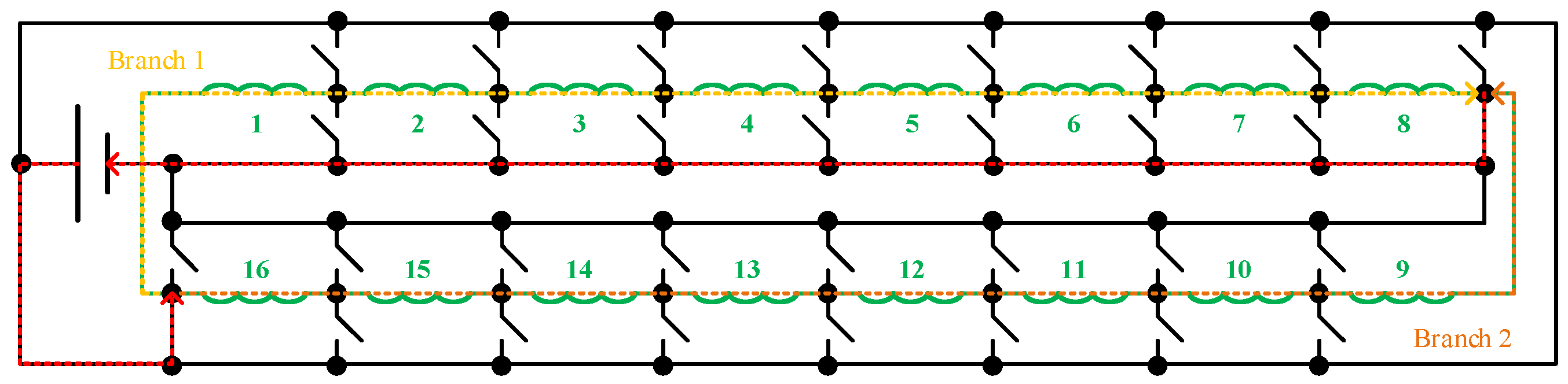
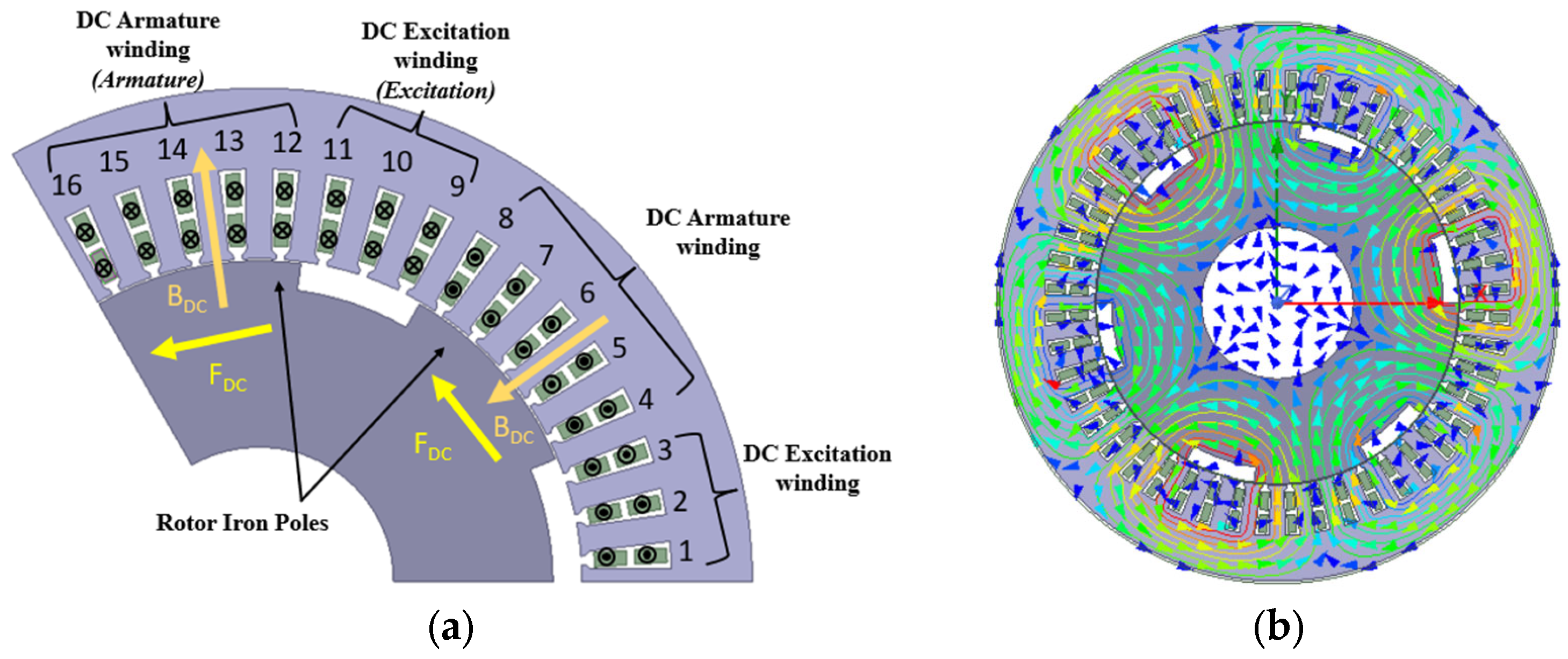
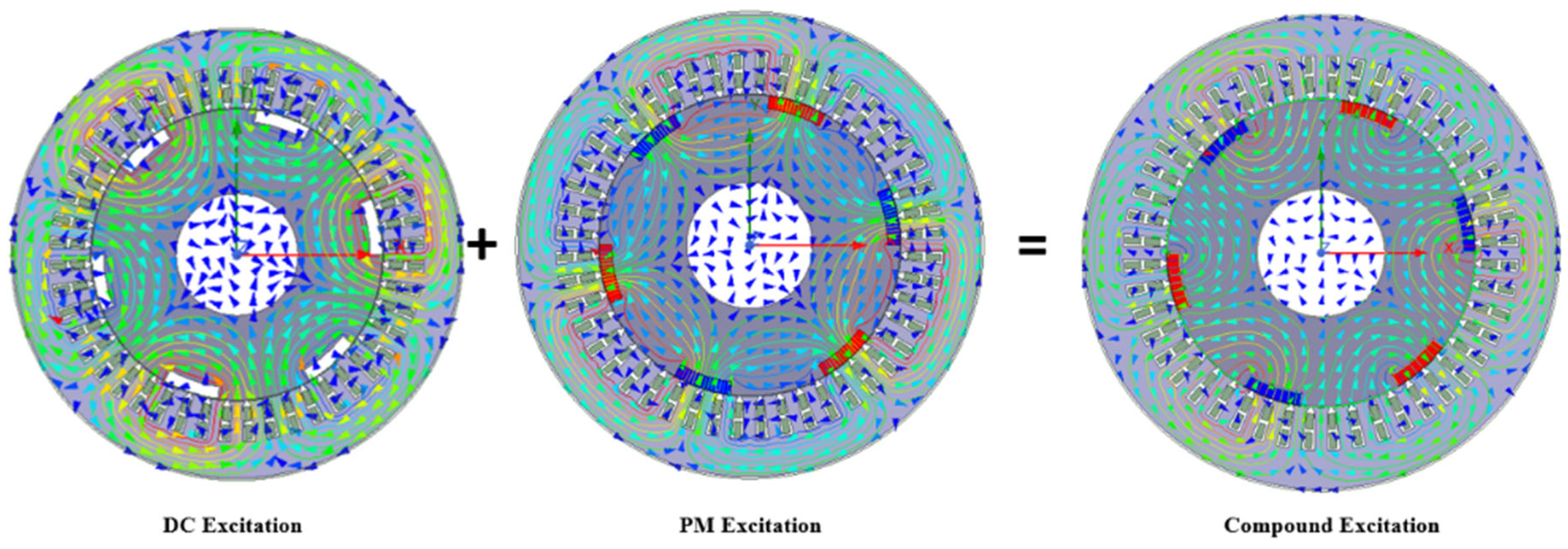
3. Operating Principle
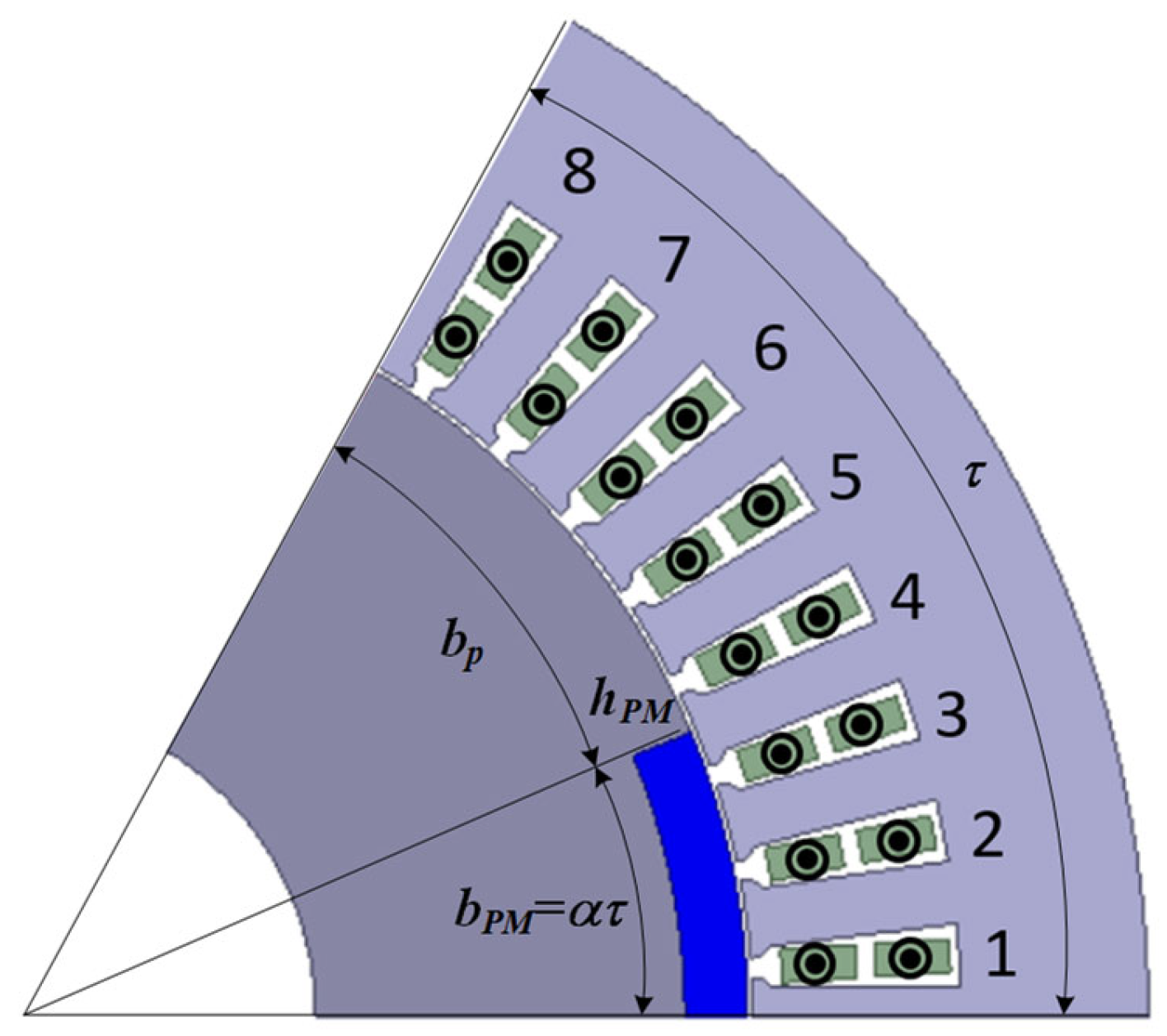
4. Analytical Analysis of the PMA-CE-BLDCM
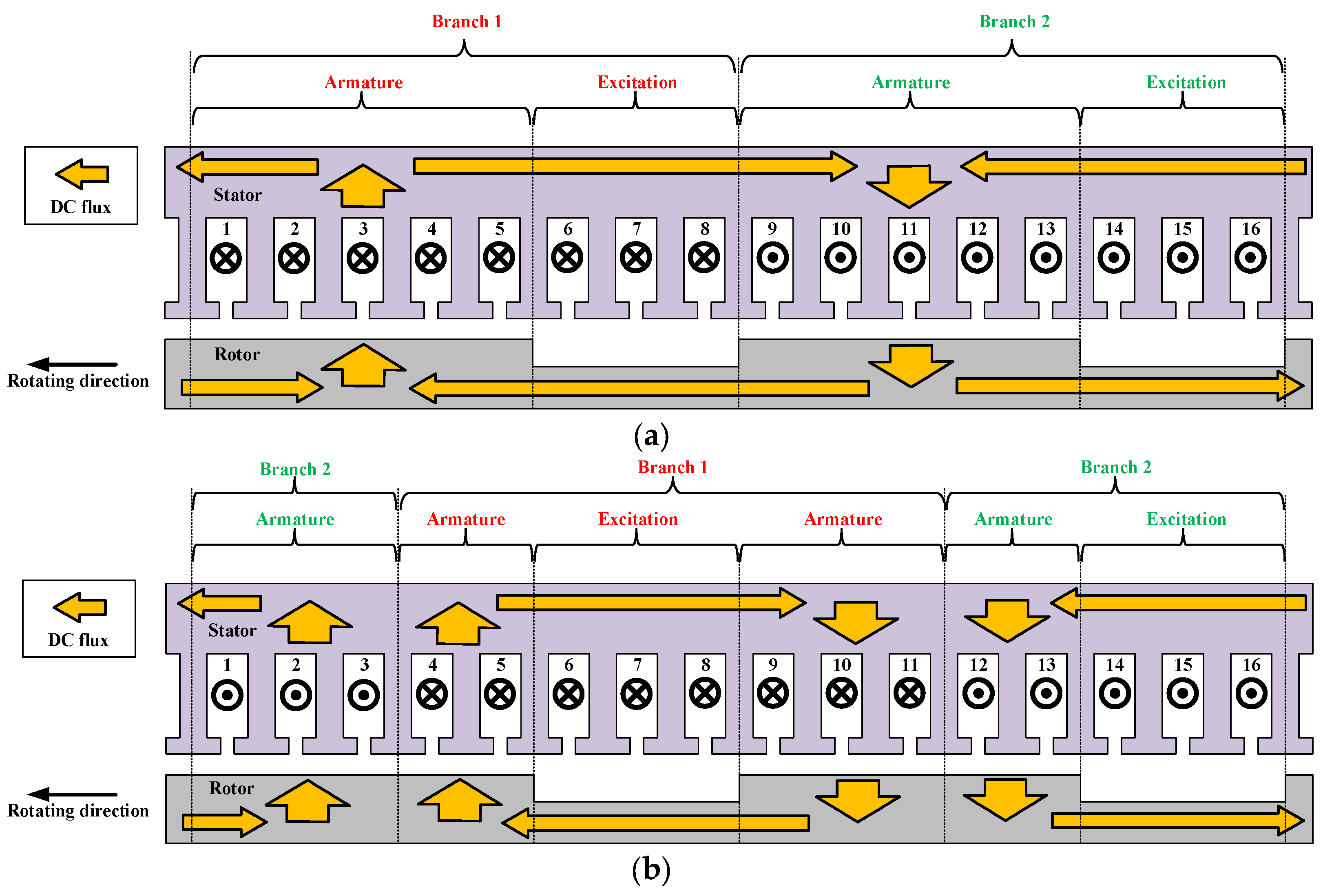
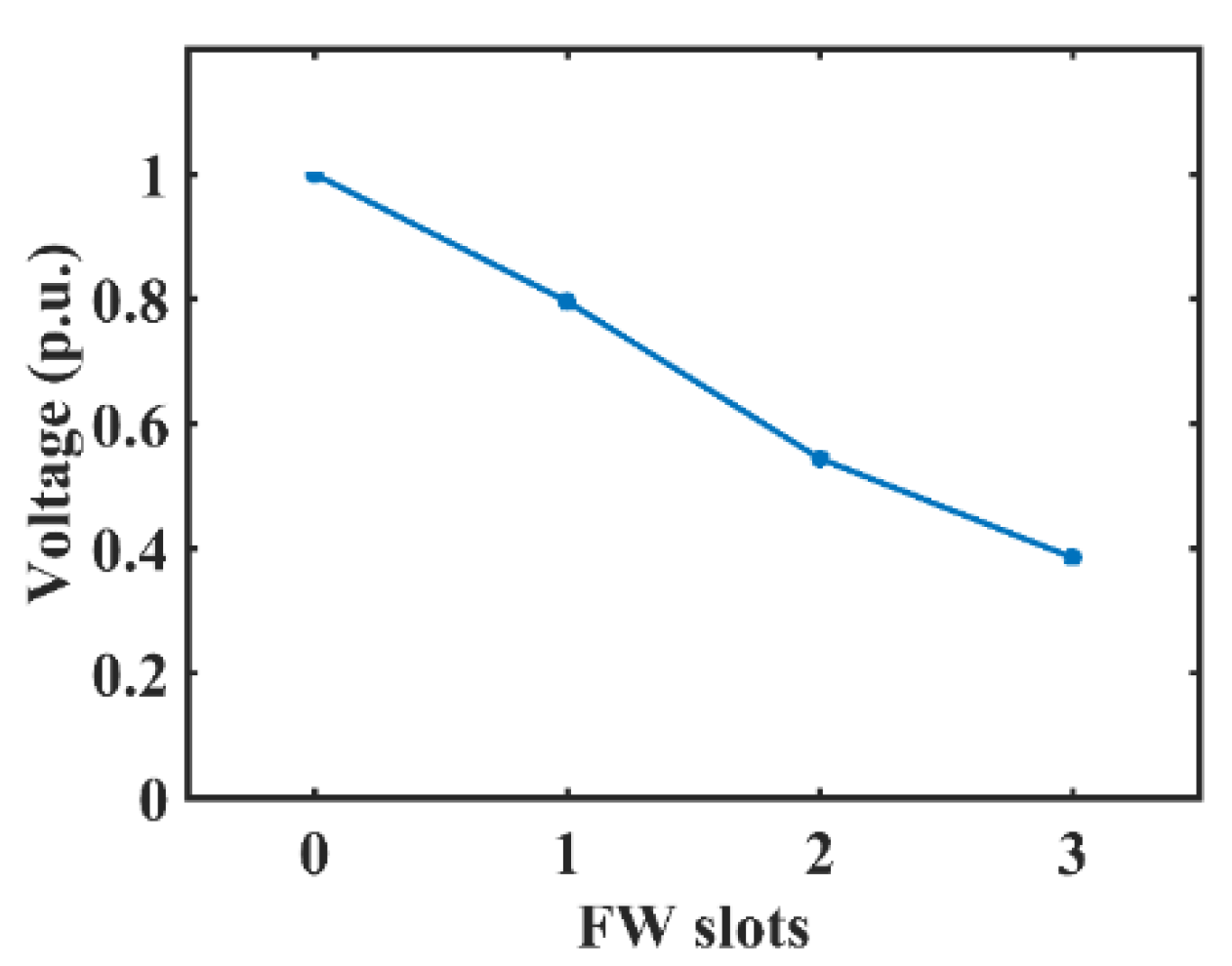
5. Analysis of the Flux Weakening Principle
6. Characteristics of the PMA-CE-BLDCM
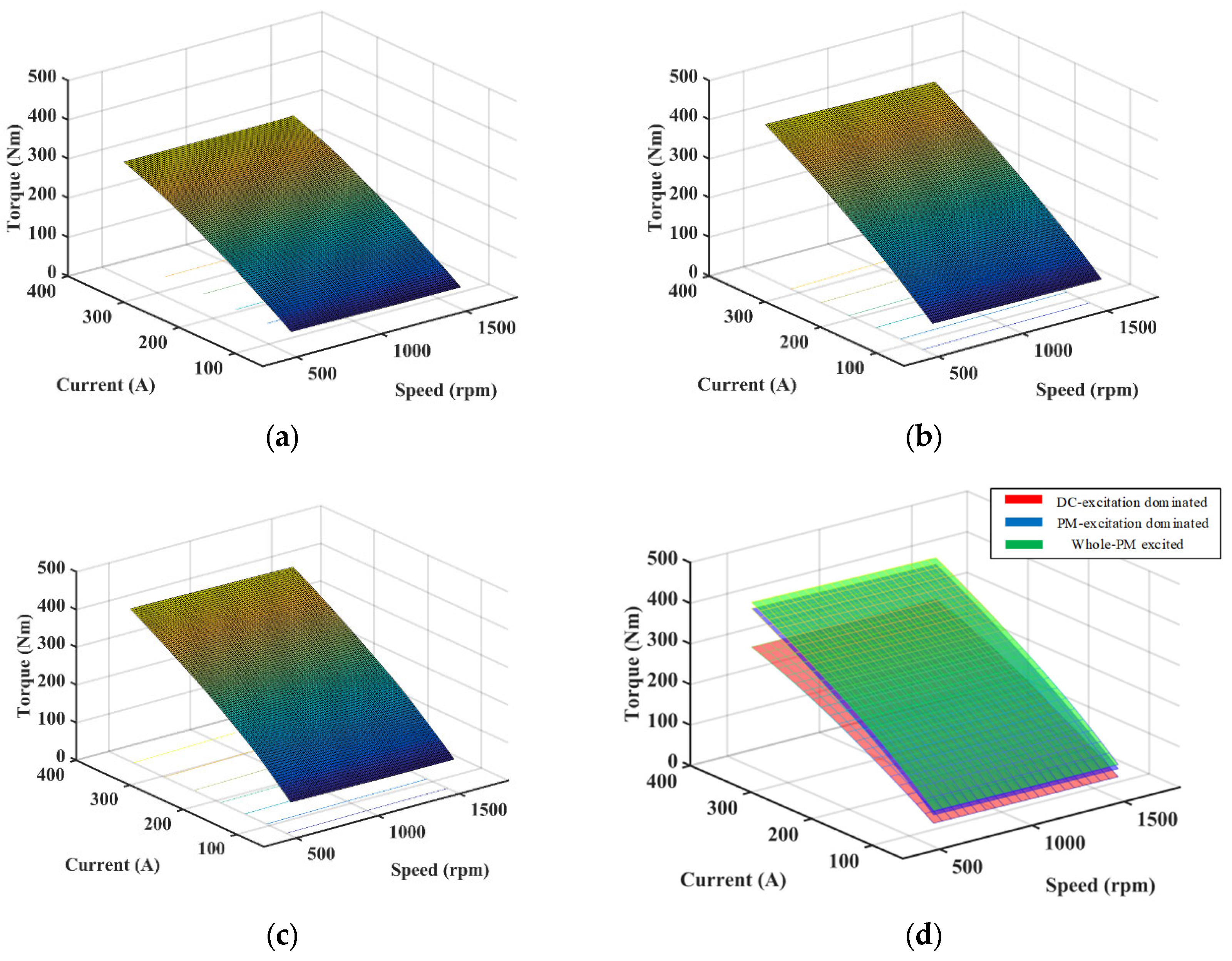
6.1. The Mechanical Characteristics
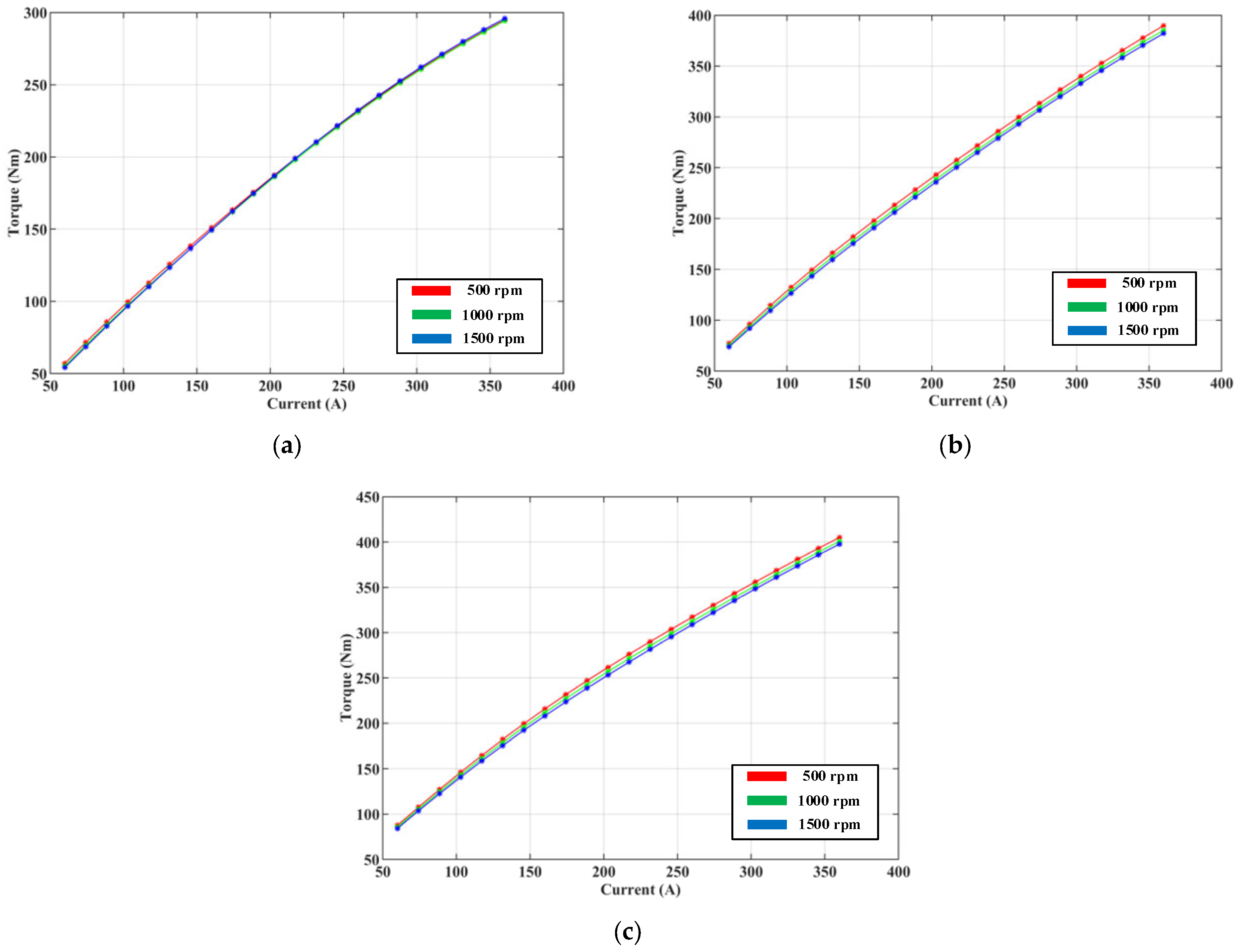
6.2. The Regulating Characteristics
6.3. The Working Characteristics
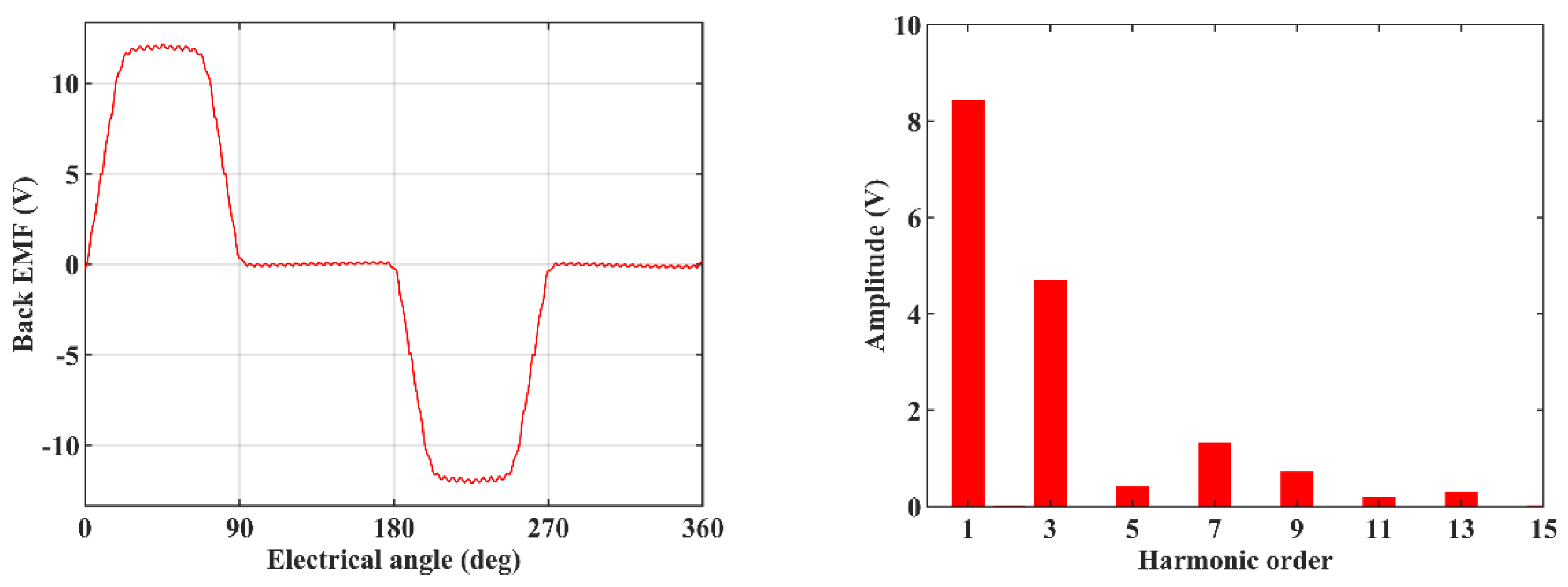
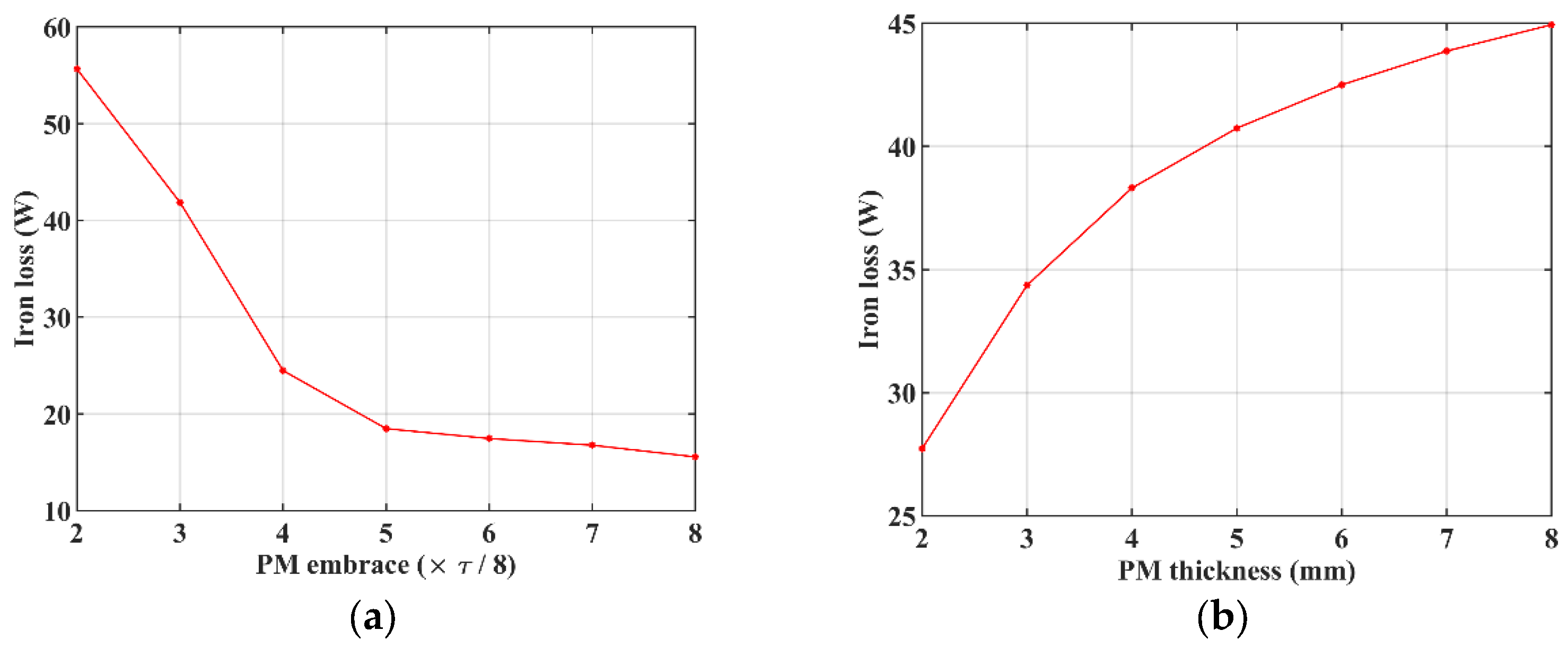
6.4. Back EMF and Iron Loss Analysis
7. Comparison of Different Designs
7.1. Torque per PM Volume
7.2. Torque Ripple
8. Conclusions
- i.
- High torque per PM volume: As PM material is, relatively, the most expensive part in current machine manufacturing costs, the PMA-CE-BLDCM uses DC excitation along with the PM excitation, which greatly reduces the use of PM while keeping the performance unchanged, compared to the whole-PM excited machine. Its torque per PM volume is higher than the conventional BLDC motors’.
- ii.
- Simple and easy speed regulation: For the constant-torque region, because the PMA-CE-BLDCM is a DC motor, its controlling method is much simpler than the AC motors, which only need to regulate the input voltage. For the constant-power region, the PMA-CE-BLDCM also has the merit of a simple and advantageous flux weakening ability, which allows the motor to increase its speed range. By controlling the lagging slots of the winding excitation behind the rotor’s position, the flux weakening of the proposed machine can be smoothly achieved to near 100%.
- iii.
- Full use of windings and good torque-speed characteristics: The PMA-CE-BLDCM uses DC-excited and PM-excited sources to fully use all the windings. It has the characteristics of a compound-excited motor.
- iv.
- Simple manufacturing: The PMA-CE-BLDCM’s structure is almost the same as an SPM type PMSM (also can be modified to interior PM type), whose manufacturing procedure is highly developed.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fitzgerald, A.E.; Kingsiey, C., Jr.; Umans, S.D. Electric Machinery, 6th ed.; McGraw-Hill: New York, NY, USA, 2002. [Google Scholar]
- Tang, Y.; Shi, N. Electric Machinery, 2nd ed.; China Machine Press: Beijing, China, 2008. [Google Scholar]
- Miller, T.J.E. Brushless Permanent-Magnet and Reluctance Motor Drives; Oxford University Press: New York, NY, USA, 1989. [Google Scholar]
- Gieras, J.F.; Wing, M. Permanent Magnet Motor Technology: Design and Applications; Marcel Dekker: New York, NY, USA, 2002. [Google Scholar]
- Gan, J.; Chau, K.T.; Chan, C.C.; Jiang, J.Z. A new surface-inset, permanent-magnet, brushless DC motor drive for electric vehicles. IEEE Trans. Magn. 2000, 36, 3810–3818. [Google Scholar]
- Wang, Y.; Chau, K.T.; Gan, J.; Chan, C.C.; Jiang, J.Z. Design and analysis of a new multiphase polygonal-winding permanent-magnet brushless DC machine. IEEE Trans. Magn. 2002, 38, 3258–3260. [Google Scholar] [CrossRef]
- Zhu, L.; Jiang, S.Z.; Jiang, J.Z.; Zhu, Z.Q.; Chan, C.C. A New Simplex Wave Winding Permanent-Magnet Brushless DC Machine. IEEE Trans. Magn. 2011, 47, 252–259. [Google Scholar] [CrossRef]
- Zhu, L.; Jiang, S.Z.; Jiang, J.Z.; Zhu, Z.Q.; Chan, C.C. Speed Range Extension for Simplex Wave Winding Permanent-Magnet Brushless DC Machine. IEEE Trans. Magn. 2013, 49, 890–897. [Google Scholar] [CrossRef]
- Jia, Z.; Zhang, Q.; Wang, D. A Sensorless Control Algorithm for the Circular Winding Brushless DC Motor Based on Phase Voltages and DC Current Detection. IEEE Trans. Ind. Electron. 2021, 68, 9174–9184. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value | ||
|---|---|---|---|
| DC-Dominated | PM-Dominated | Whole-PM | |
| Stator outer diameter | 220 mm | ||
| Stator inner diameter | 144 mm | ||
| Airgap length | 0.5 mm | ||
| Axial length | 135 mm | ||
| Pole pair number | 3 | ||
| Slot number | 48 | ||
| Thickness of PM | 6 mm | ||
| Embrace of PM | |||
| Rated voltage | 47 V | 62 V | 81 V |
| Designs | ||||||
|---|---|---|---|---|---|---|
| The PMA-CE-BLDCM derivatives | DC-excitation dominated | 168 Nm | 14.03 Nm | 10−4 m3 | 106 Nm/m3 | |
| PM-excitation dominated | 219 Nm | 67.83 Nm | 10−4 m3 | 106 Nm/m3 | ||
| Whole-PM excited | 238 Nm | 71.03 Nm | 10−4 m3 | 106 Nm/m3 | ||
| Conventional BLDC motor | 192 Nm | 62.53 Nm | 10−4 m3 | 106 Nm/m3 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, M.; Zhao, K.; Wang, W.; Niu, S. A Novel Brushless PM-Assisted DC Motor with Compound-Excited Circular Winding. Sustainability 2023, 15, 13924. https://doi.org/10.3390/su151813924
Jiang M, Zhao K, Wang W, Niu S. A Novel Brushless PM-Assisted DC Motor with Compound-Excited Circular Winding. Sustainability. 2023; 15(18):13924. https://doi.org/10.3390/su151813924
Chicago/Turabian StyleJiang, Mingyuan, Kangshuo Zhao, Weiyu Wang, and Shuangxia Niu. 2023. "A Novel Brushless PM-Assisted DC Motor with Compound-Excited Circular Winding" Sustainability 15, no. 18: 13924. https://doi.org/10.3390/su151813924
APA StyleJiang, M., Zhao, K., Wang, W., & Niu, S. (2023). A Novel Brushless PM-Assisted DC Motor with Compound-Excited Circular Winding. Sustainability, 15(18), 13924. https://doi.org/10.3390/su151813924