
A Dynamic Assessment of Rubber–Sand Mixtures as Subgrade Materials during Vibratory Roller Compaction through DEM Simulation in 2D


Abstract
:1. Introduction
2. DEM Simulation of Vibration Roller
2.1. Contact Law
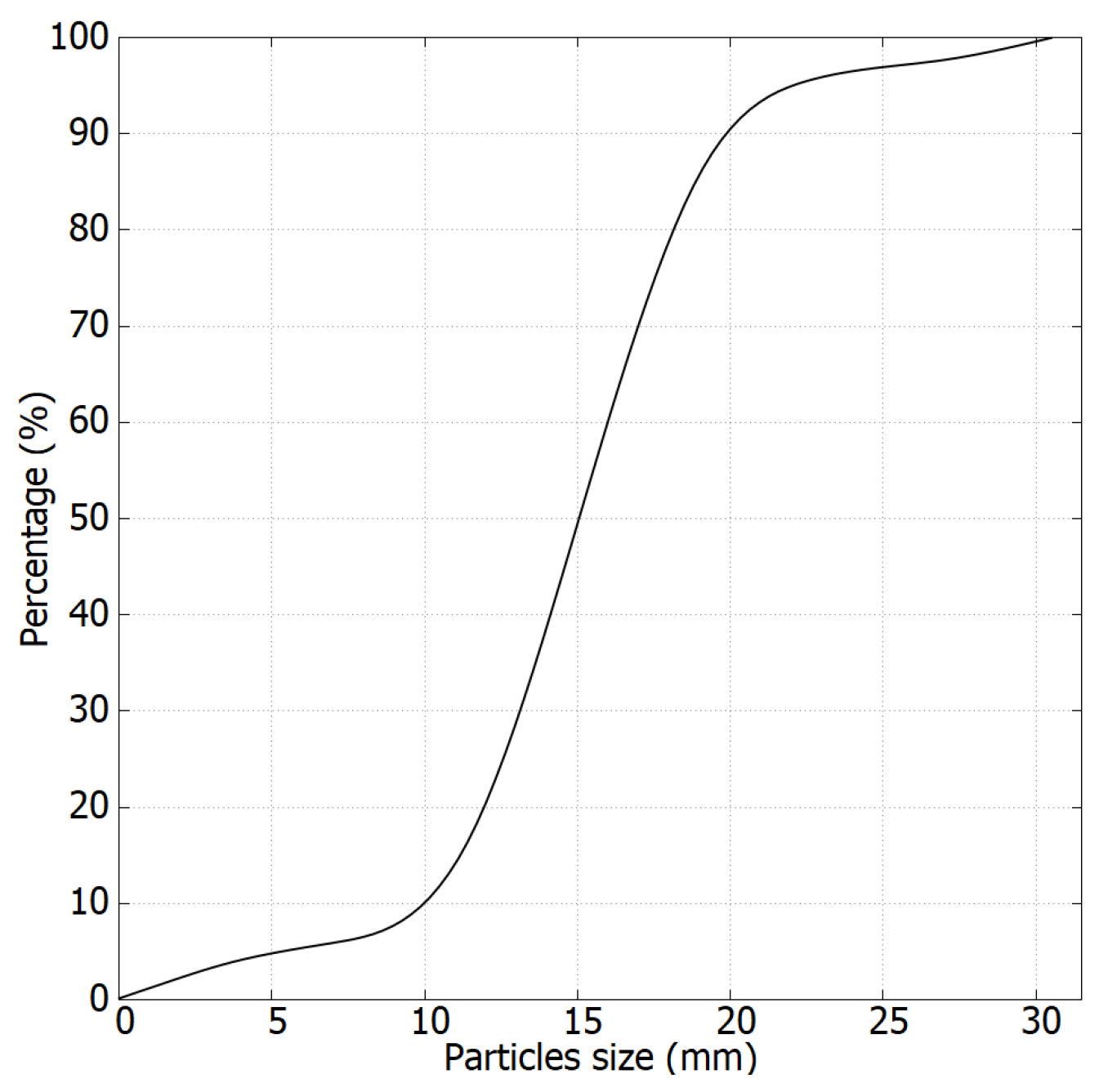
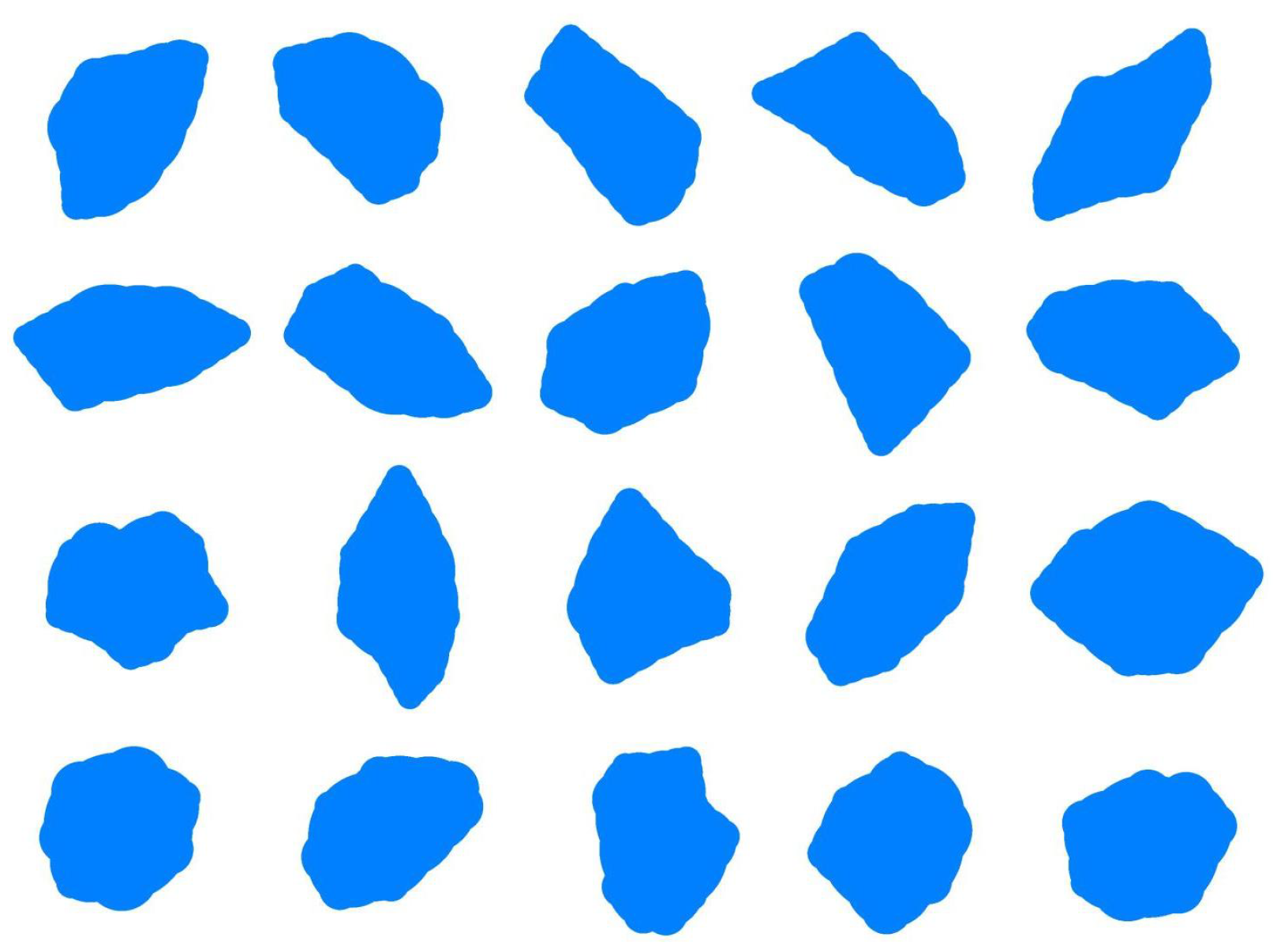
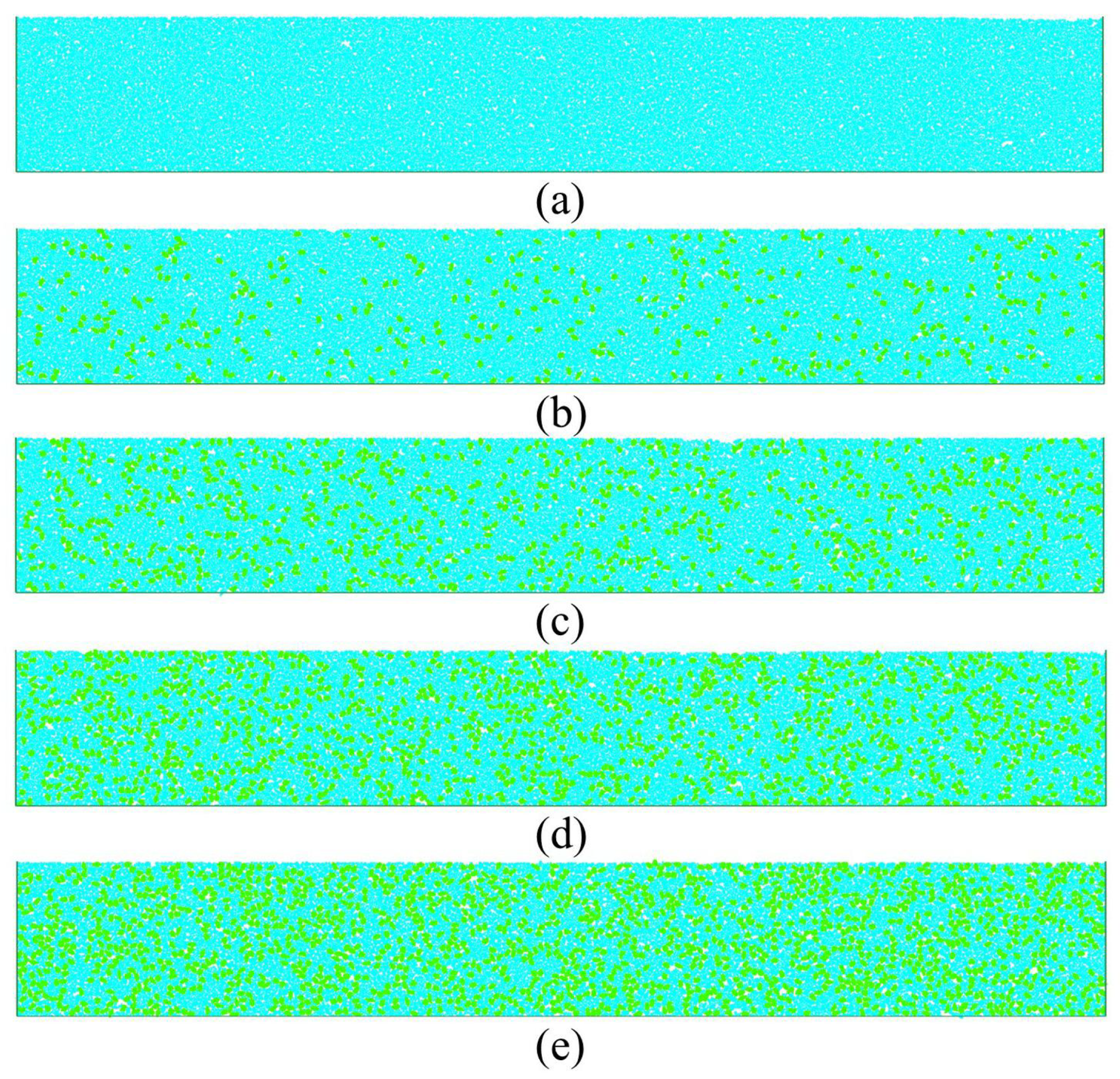
2.2. Generation of Subgrade Sample of Gravels and Rubber Mixtures
2.3. DEM Simulation of Vibration Roller
3. Results and Discussions
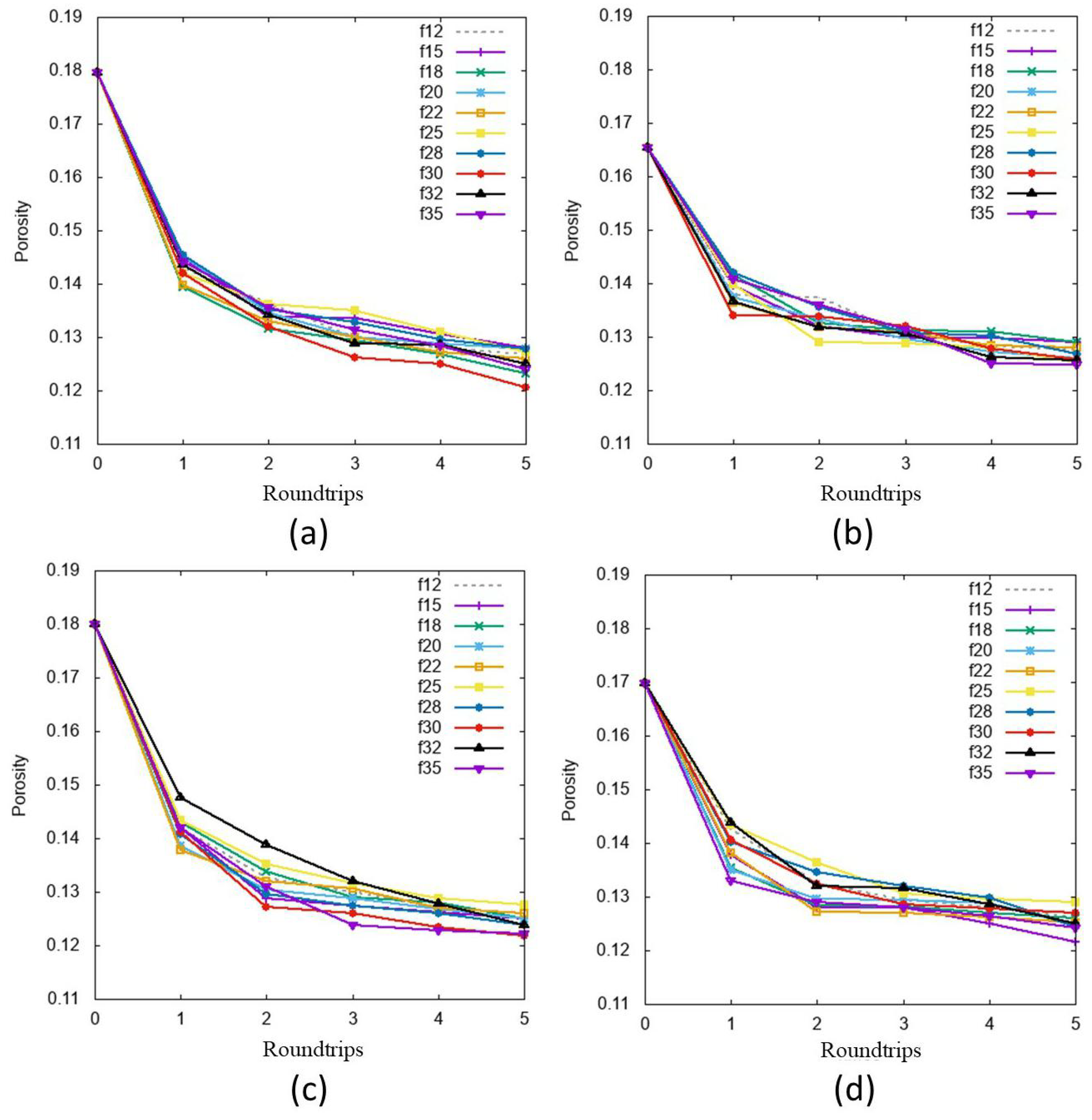
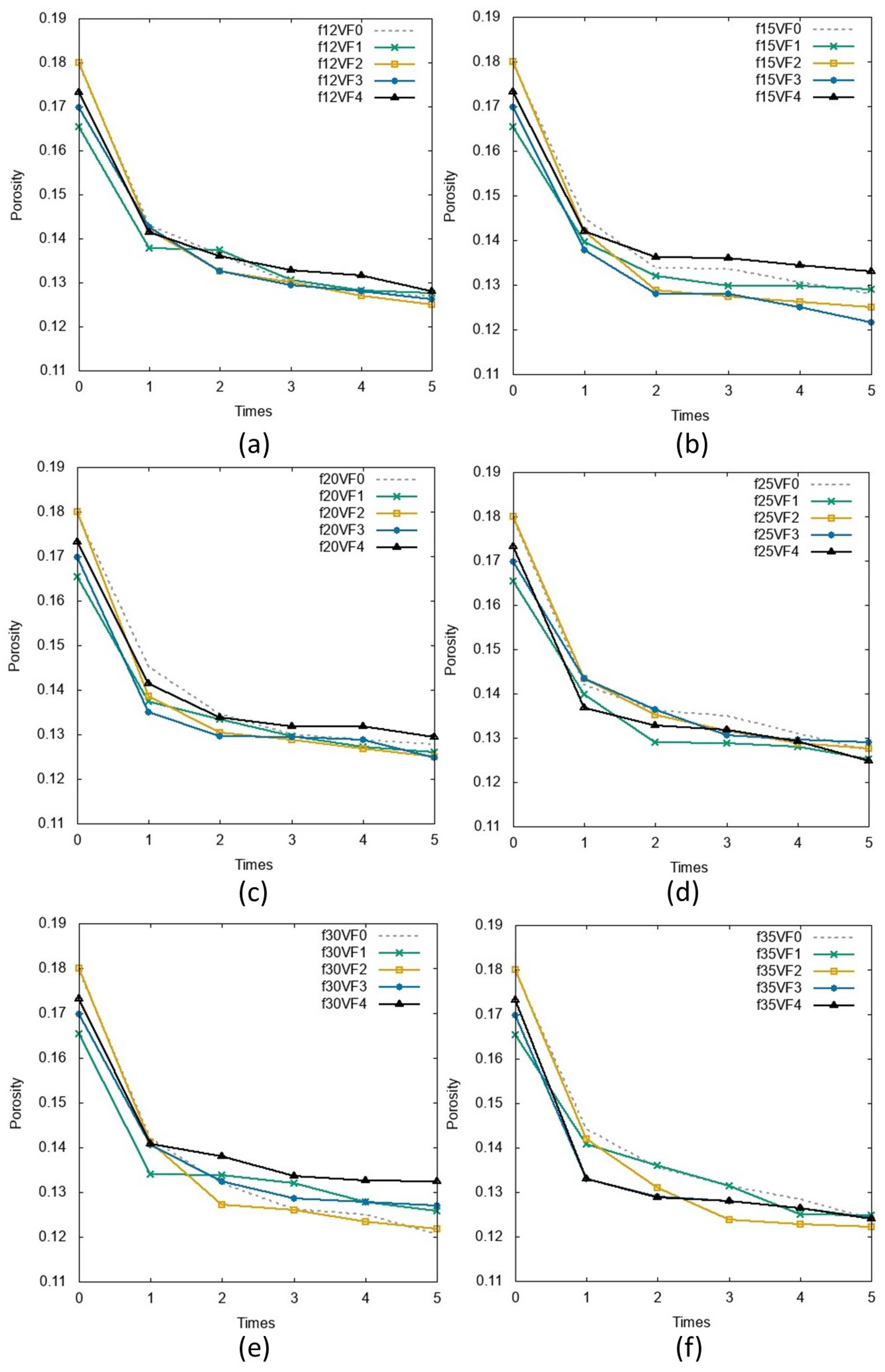
3.1. Influence of Vibration Frequency
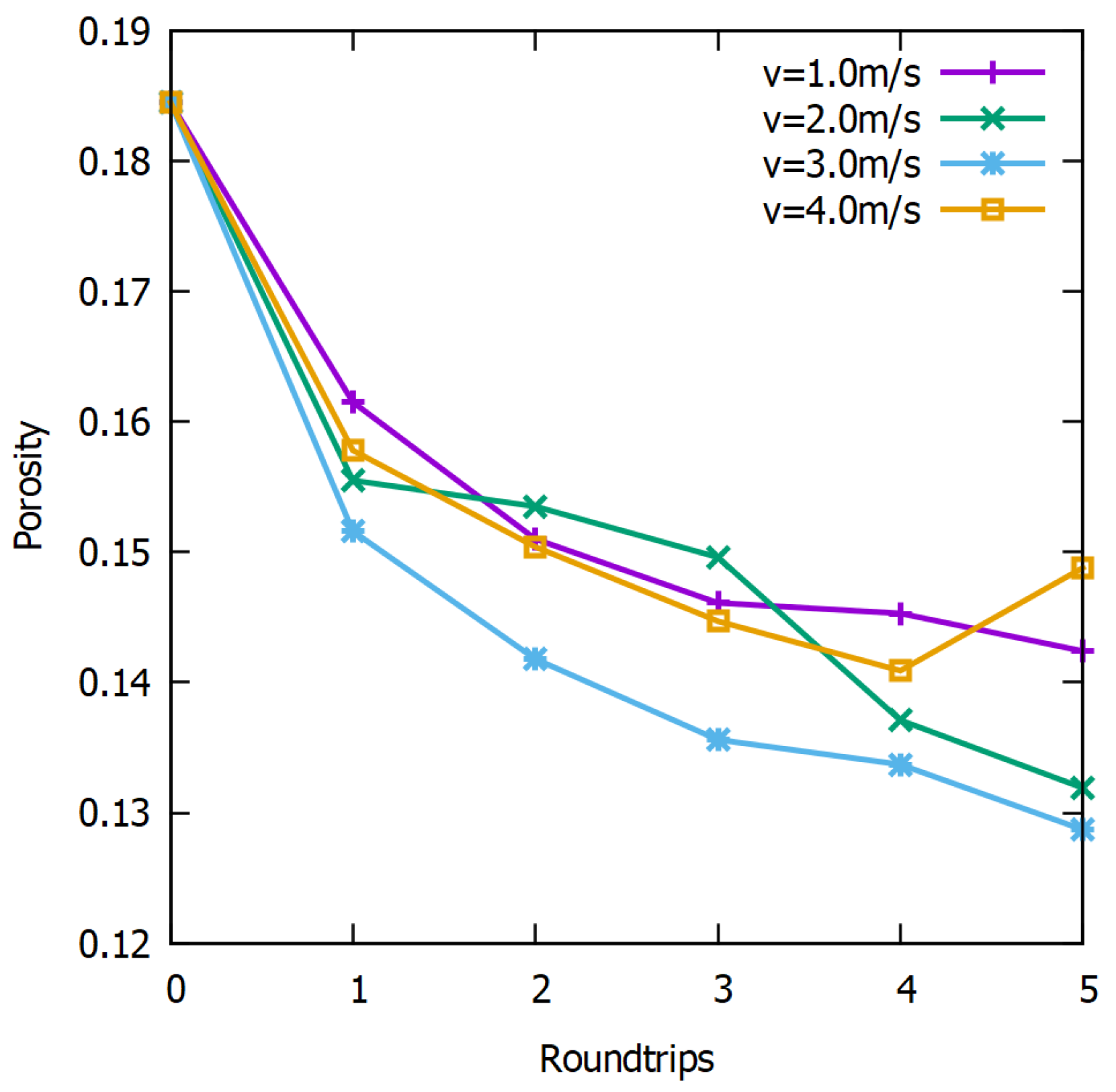
3.2. Influence of Rolling Velocity
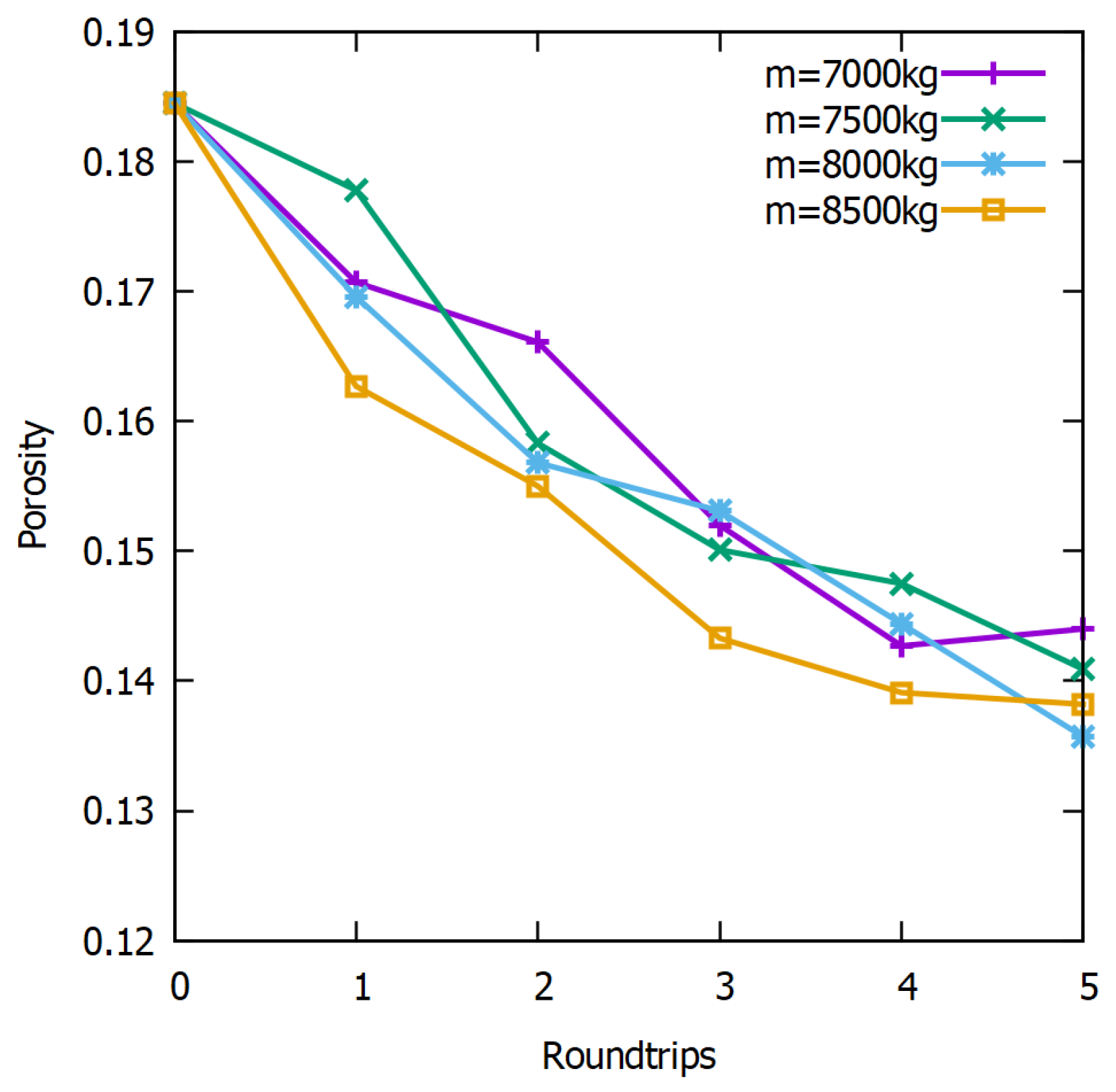
3.3. Influence of Roller Mass
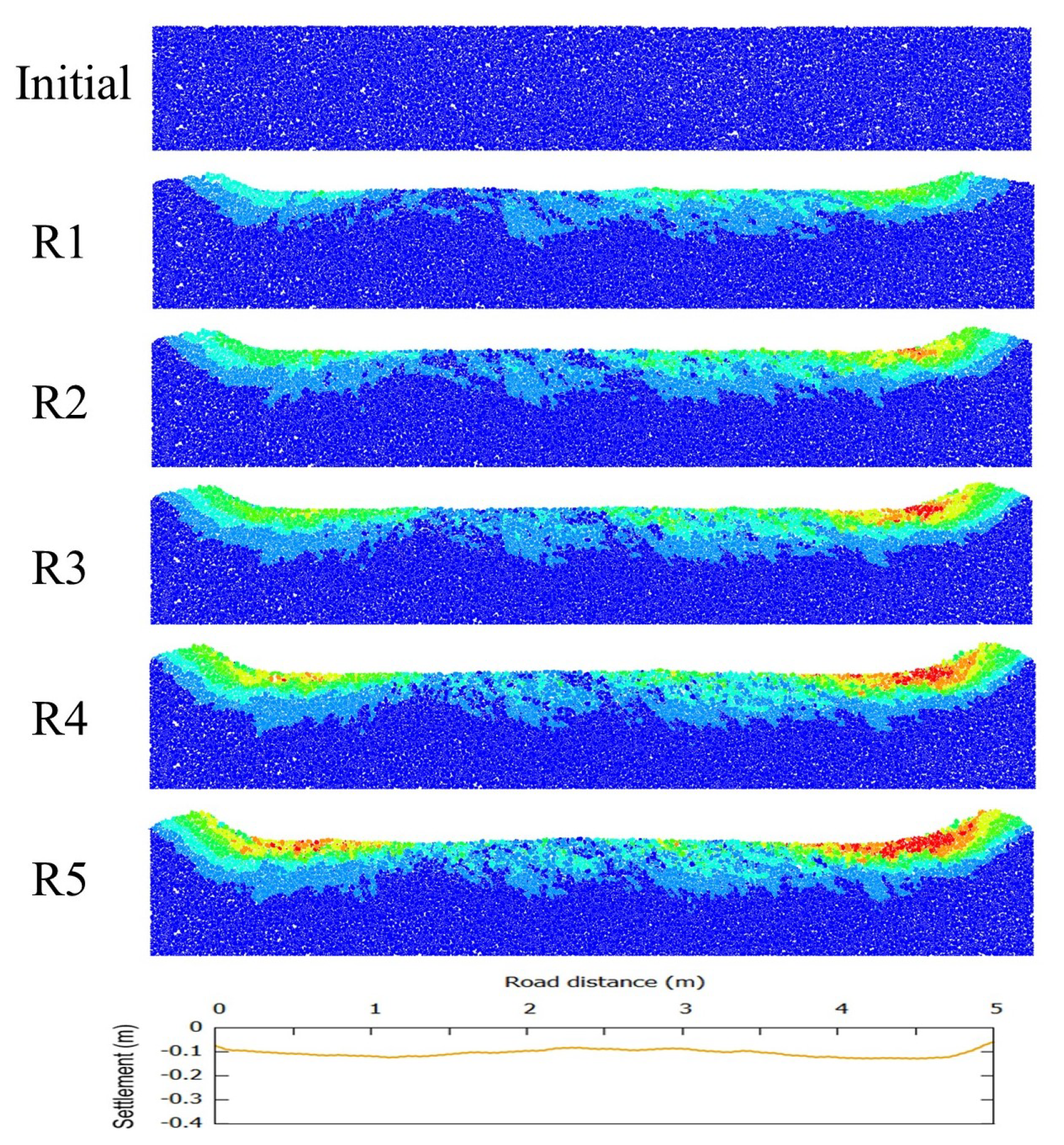
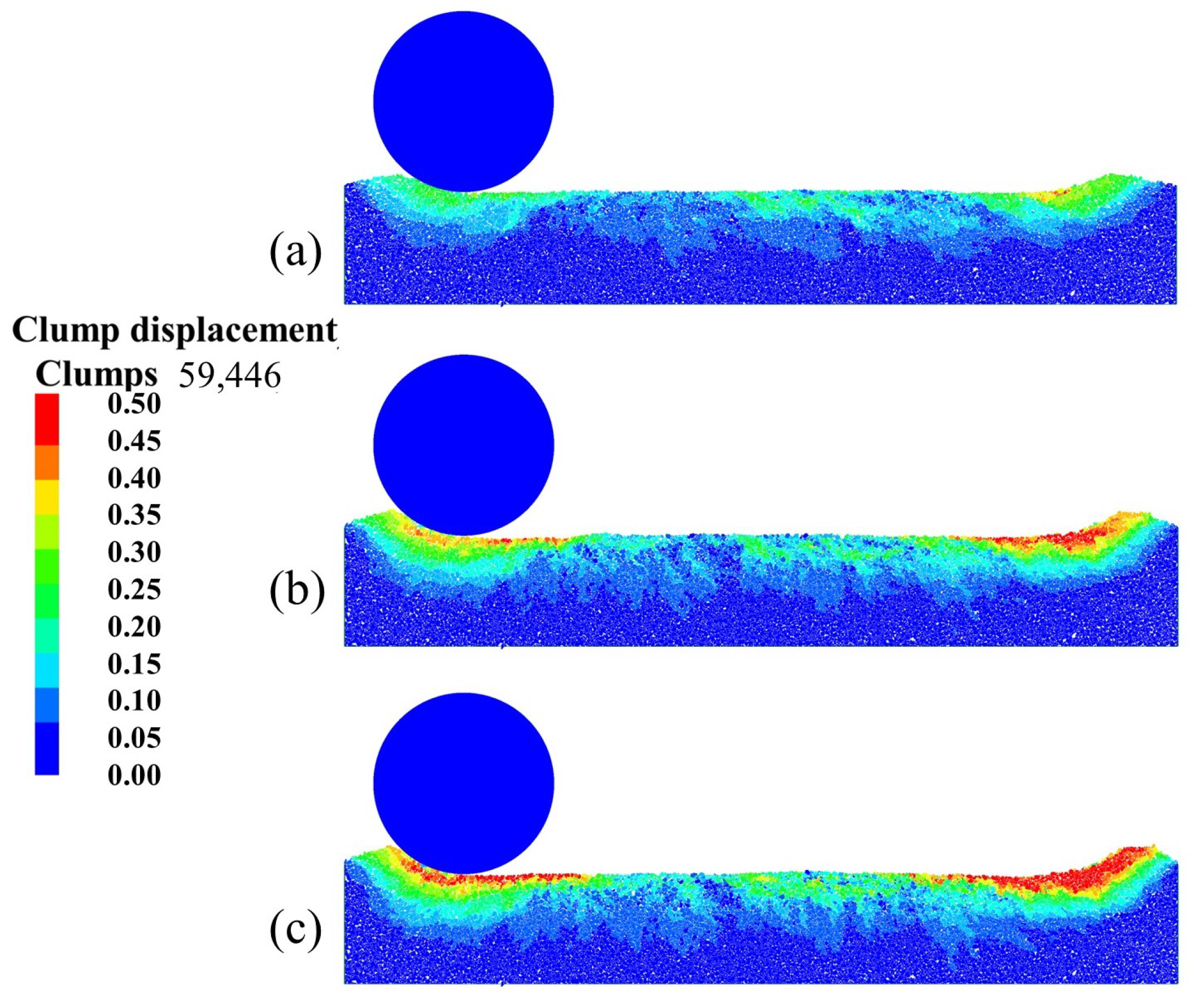
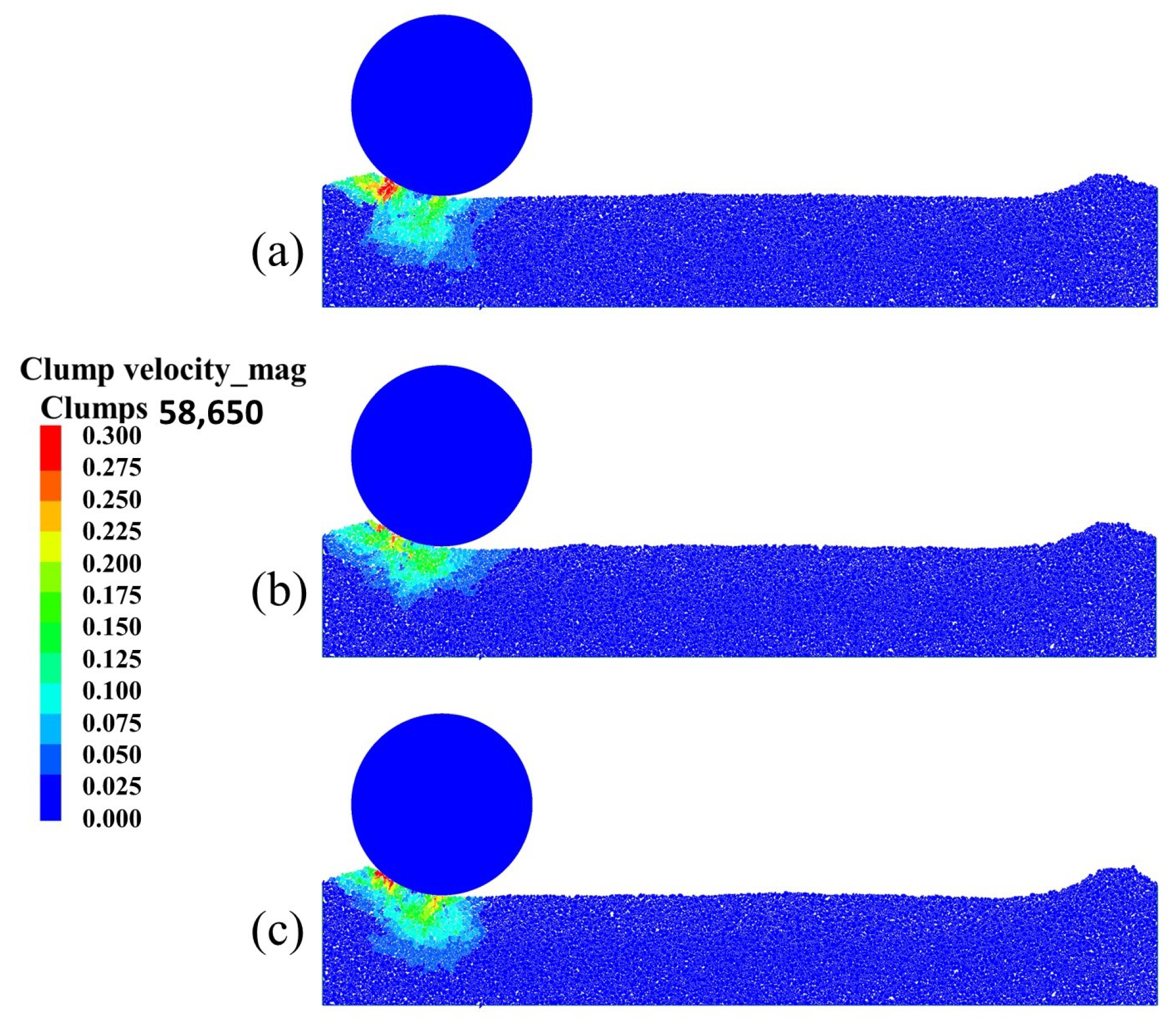
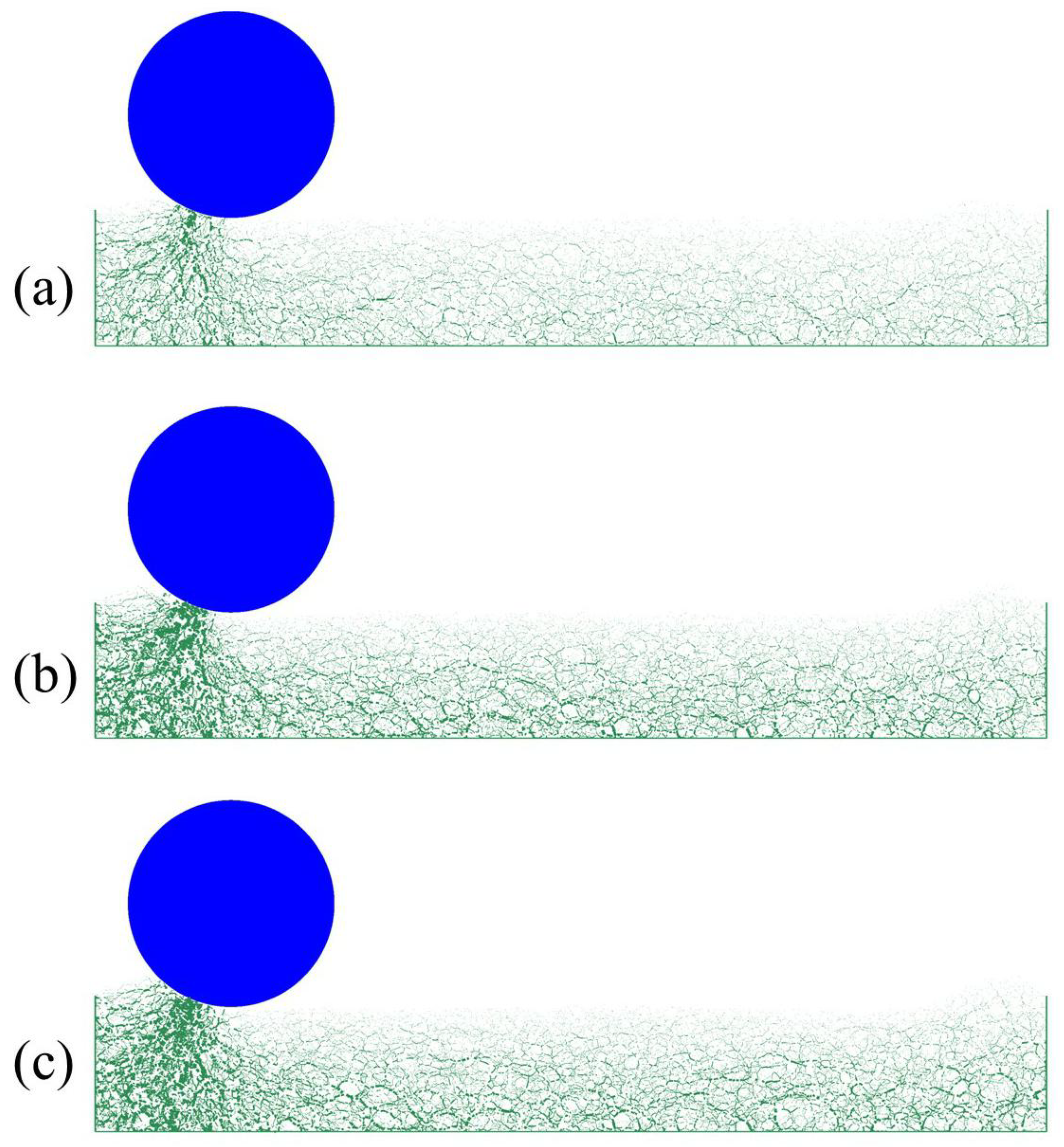
3.4. Displacement Field, Velocity Field, and Contact Force Chain
4. Conclusions
- The vibration frequency significantly influences the vibration compaction effect of rubber–sand mixtures. For mixtures with lower rubber content, optimal vibration effects are achieved at lower frequencies. Conversely, mixtures with higher rubber content require a progressively higher optimal vibration frequency to achieve the desired compaction effect.
- The rubber content also affects the vibration compaction effect at the same vibration frequency, showing an initial increase followed by a decrease. Both the absence of rubber and high rubber content can reduce the vibration compaction effect. The 20% content of rubber with 35 Hz is demonstrated as a better compaction effects and lower energy consumption.
- The rolling velocity and roller mass have a substantial influence on the vibration compaction effect, and their impacts do not follow a linear increase or decrease pattern. Therefore, achieving optimal compaction efficiency in engineering requires considering not only the rubber content in the mixture but also selecting an appropriate rolling velocity and roller mass.
- The displacement field, velocity field, and contact forces offer insights into the interaction mechanism between the roller and rubber–sand mixture particles during the vibration compaction process. The movement of gravel under the roller is typically divided into two directions, and the strong force network plays a crucial role in the interaction between the roller and the granular particles.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, J.Y.; Nicot, F.; Zhou, W. Sustainability of internal structures during shear band forming in 2D granular materials. Powder Technol. 2018, 338, 458–470. [Google Scholar] [CrossRef]
- Platzer, A.; Rouhanifar, S.; Richard, P.; Cazacliu, B.; Ibraim, E. Sand-rubber mixtures undergoing isotropic loading derivation and experimental probing of a physical model. Granul. Matter 2018, 20, 81. [Google Scholar] [CrossRef]
- Manohar, D.R.; Anbazhagan, P. Shear strength characteristics of geosynthetic reinforced rubber-sand mixtures. Geotext. Geomembranes 2021, 49, 910–920. [Google Scholar] [CrossRef]
- Wu, K.; Sun, W.C.; Liu, S.Y.; Huang, H.B. Discrete Element Modeling of Vibration Compaction Effect of the Vibratory Roller in Roundtrips on Gravels. J. Test. Eval. 2021, 49, 3869–3884. [Google Scholar] [CrossRef]
- Ding, Y.; Zhang, J.S.; Chen, X.B.; Wang, X.; Jia, Y. Experimental investigation on static and dynamic characteristics of granulated rubber sand mixtures as a new railway subgrade filler. Constr. Build. Mater. 2021, 273, 121955. [Google Scholar] [CrossRef]
- Fakharian, K.; Ahmad, A. Effect of anisotropic consolidation and rubber content on dynamic parameters of granulated rubber-sand mixtures. Soil Dyn. Earthq. Eng. 2021, 141, 106531. [Google Scholar] [CrossRef]
- Khatami, H.; Deng, A.; Jaksa, M. Discrete-element modelling of the trapdoor arching effect in sand and rubberised sand. Proc. Inst. Civ. Eng. Geotech. Eng. 2021, 174, 657–669. [Google Scholar] [CrossRef]
- Yaowarat, T.; Suddeepong, A.; Hoy, M.; Horpibulsuk, S.; Takaikaew, T.; Vichitcholchai, N.; Arulrajah, A.; Chinkulkijniwat, A. Improvement of flexural strength of concrete pavements using natural rubber latex. Constr. Build. Mater. 2021, 282, 122704. [Google Scholar] [CrossRef]
- Saberian, M.; Li, J.; Perera, S.T.A.M.; Zhou, A.; Roychand, R.; Ren, G. Large-scale direct shear testing of waste crushed rock reinforced with waste rubber as pavement base/subbase materials. Transp. Geotech. 2021, 28, 100546. [Google Scholar] [CrossRef]
- Li, D.L.; Leng, Z.; Zhang, S.W.; Jiang, J.W.; Yu, H.Y.; Wellner, F.; Leischner, S. Blending efffciency of reclaimed asphalt rubber pavement mixture and its correlation with cracking resistance. Resour. Conserv. Recycl. 2022, 185, 106506. [Google Scholar] [CrossRef]
- Tran, N.Q.; Hoy, M.; Suddeepong, A.; Horpibulsuk, S.; Kantathum, K.; Arulrajah, A. Improved mechanical and microstructure of cement-stabilized lateritic soil using recycled materials replacement and natural rubber latex for pavement applications. Constr. Build. Mater. 2022, 347, 128547. [Google Scholar] [CrossRef]
- Valizadeh, H.; Ecemis, N. Soil liquefaction-induced uplift of buried pipes in sand-granulated-rubbermixture Numerical modeling. Transp. Geotech. 2022, 33, 100719. [Google Scholar] [CrossRef]
- Tan, T.; Xing, C.; Tan, Y.Q. Rubber friction on icy pavement Experiments and modeling. Cold Reg. Sci. Technol. 2020, 174, 103022. [Google Scholar] [CrossRef]
- Wersall, C.; Nordfelt, I.; Larsson, S. Soil compaction by vibratory roller with variable frequency. Geotechnique 2017, 67, 272–278. [Google Scholar] [CrossRef]
- Wersall, C.; Nordfelt, I.; Larsson, S. Resonant roller compaction of gravel in full-scale tests. Transp. Geotech. 2018, 14, 93–97. [Google Scholar] [CrossRef]
- Cundall, P.A.; Strack, O.D.L. A discrete numerical model for granular assemblies. Geotechnique 1979, 29, 47–65. [Google Scholar] [CrossRef]
- Tian, J.Q.; Liu, E.L. Effect of particle shape on micro-and mesostructure evolution of granular assemblies under biaxial loading conditions. Comptes Rendus Mec. 2018, 346, 1233–1252. [Google Scholar] [CrossRef]
- Wu, K.; Remond, S.; Abriak, N.E.; Pizette, P.; Becquart, F.; Liu, S.Y. Study of the shear behavior of binary granular materials by DEM simulations and experimental triaxial tests. Adv. Powder Technol. 2017, 28, 2198–2210. [Google Scholar] [CrossRef]
- Ma, C.; Yao, W.M.; Yao, Y.; Li, J. Simulating Strength Parameters and Size Effect of Stochastic Jointed Rock Mass using DEM Method. KSCE J. Civ. Eng. 2018, 22, 4872–4881. [Google Scholar] [CrossRef]
- Hanley, K.J.; O’Sullivan, C.; Huang, X. Particle-scale mechanics of sand crushing incompression and shearing using DEM. Soils Found. 2015, 55, 1100–1112. [Google Scholar] [CrossRef]
- Chen, Y.; Jaksa, M.B.; Kuo, Y.; Airey, D.W. Investigating the effectiveness of Rolling Dynamic Compaction using Discrete Element Method. Granul. Matter 2021, 23, 94. [Google Scholar] [CrossRef]
- Perez, J.C.L.; Kwok, C.Y.; Senetakis, K. Micromechanical analyses of the effect of rubber size and content on sand-rubber mixtures at the critical state. Geotext. Geomembranes 2017, 45, 81–97. [Google Scholar] [CrossRef]
- Asadi, M.; Thoeni, K.; Mahboubi, A. An experimental and numerical study on the compressive behavior of sand rubber particle mixtures. Comput. Geotech. 2018, 104, 185–195. [Google Scholar] [CrossRef]
- Gong, L.X.; Nie, L.; Xu, Y.; Wang, H.; Zhang, T.; Du, C.; Wang, Y.Z. Discrete element modelling of the mechanical behaviour of a sand-rubber mixture containing large rubber particles. Constr. Build. Mater. 2019, 205, 574–585. [Google Scholar] [CrossRef]
- Sarajpoor, S.; Kavand, A.; Zogh, P.; Ghalandarzadeh, A. Dynamic behavior of sand-rubber mixtures based on hollow cylinder tests. Constr. Build. Mater. 2020, 251, 118948. [Google Scholar] [CrossRef]
- Akbarimehr, D.; Fakharian, K. Dynamic shear modulus and damping ratio of clay mixed with waste rubber using cyclic triaxial apparatus. Soil Dyn. Earthq. Eng. 2021, 140, 106435. [Google Scholar] [CrossRef]
- Akbarimehr, D.; Hosseini, S. Elasto-plastic characteristics of the clay soil mixed with rubber waste using cyclic triaxial test results. Arab. J. Geosci. 2022, 15, 1280. [Google Scholar] [CrossRef]
- Ai, J.; Chen, J.F.; Rotter, J.M.; Ooi, J.Y. Assessment of Rolling Resistance Models in Discrete Element Simulations. Powder Technol. 2011, 206, 269–282. [Google Scholar] [CrossRef]
- Baghbani, A.; Costa, S.; Lu, Y.; Soltani, A.; Abuel-Naga, H.; Samui, P. Effects of particle shape on shear modulus of sand using dynamic simple shear testing. Arab. J. Geosci. 2023, 16, 422. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Samples | Volume Fraction (VF) | Sand Particles | Rubber Particles | Initial Porosity |
|---|---|---|---|---|
| VF1 | 0% | 60,356 | 0 | 0.181 |
| VF2 | 10% | 54,278 | 5168 | 0.165 |
| VF3 | 20% | 48,204 | 10,446 | 0.180 |
| VF4 | 30% | 42,183 | 15,537 | 0.172 |
| VF5 | 40% | 36,214 | 20,922 | 0.175 |
| Parameter | Value | Unity |
|---|---|---|
| Effective modulus of between sand particles, | 50 | MPa |
| Effective modulus of between rubber particles, | 5 | MPa |
| Effective modulus of between sand and rubber particles, | 5 | MPa |
| Normal to shear stiffness ratio, | 1.5 | - |
| Normal critical damping ratio, | 0.25 | - |
| Shear critical damping ratio, | 1.5 × 10 | - |
| Density of sand particles, | 2230 | kg/m |
| Density of rubber particles, | 1680 | kg/m |
| Local damping, | 0.5 | - |
| Friction coefficient between sand particles, | 0.3 | - |
| Rolling resistance coefficient between sand particles, | 0.2 | - |
| Friction coefficient between rubber particles, | 0.5 | - |
| Rolling resistance coefficient between rubber particles, | 0.3 | - |
| Friction coefficient between sand–rubber particles, | 0.5 | - |
| Rolling resistance coefficient between sand–rubber particles, | 0.3 | - |
| Friction coefficient between wall–sand/rubber particles, | 0.1 | - |
| Rolling resistance coefficient between wall–sand/rubber particles, | 0.05 | - |
| Parameter | Value | Unity |
|---|---|---|
| Roller diameter, d | 1.52 | m |
| Roller width, l | 2.13 | m |
| Roller mass, m | 7000, 7600, 8000, 8500 | kg |
| Vibration frequency, f | 12, 15, 18, 20, 22, 25, 28, 30, 32, 35 | Hz |
| Rolling velocity, v | 1.0, 2.0, 3.0, 4.0 | m/s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, W.; Xie, Q.; Li, H.; Chen, J.; Wu, K. A Dynamic Assessment of Rubber–Sand Mixtures as Subgrade Materials during Vibratory Roller Compaction through DEM Simulation in 2D. Sustainability 2023, 15, 14238. https://doi.org/10.3390/su151914238
Sun W, Xie Q, Li H, Chen J, Wu K. A Dynamic Assessment of Rubber–Sand Mixtures as Subgrade Materials during Vibratory Roller Compaction through DEM Simulation in 2D. Sustainability. 2023; 15(19):14238. https://doi.org/10.3390/su151914238
Chicago/Turabian StyleSun, Weichen, Qiang Xie, Hao Li, Junxu Chen, and Kai Wu. 2023. "A Dynamic Assessment of Rubber–Sand Mixtures as Subgrade Materials during Vibratory Roller Compaction through DEM Simulation in 2D" Sustainability 15, no. 19: 14238. https://doi.org/10.3390/su151914238