
A Non-Intrusive Identification Approach for Residential Photovoltaic Systems Using Transient Features and TCN with Attention Mechanisms



Abstract
:1. Introduction
- (1)
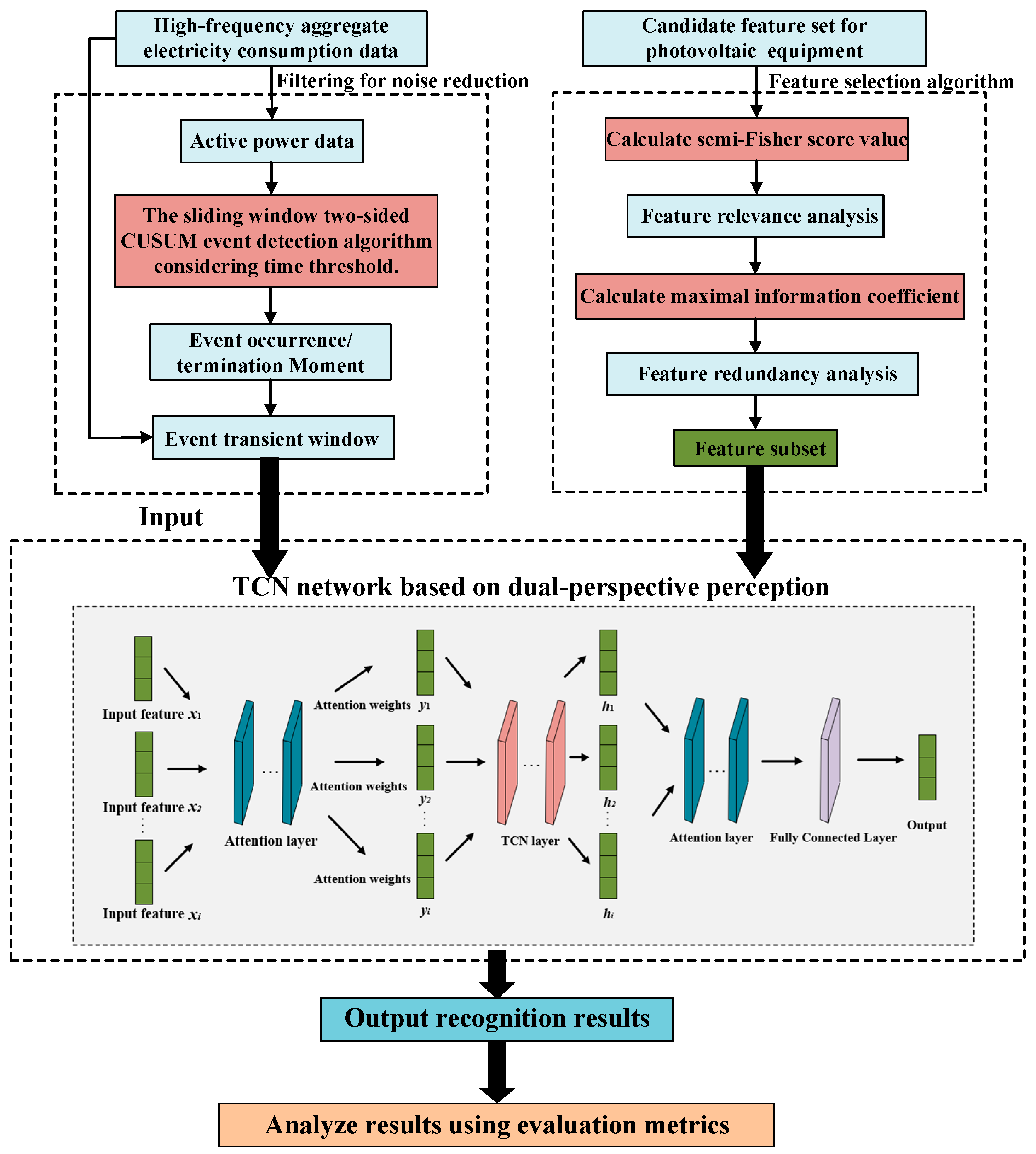
- By using a feature selection method based on the semi-Fisher score and MIC, the discrimination and redundancy of nine types of transient features of PV systems were analyzed. The features were ranked, and a subset of PV device features with the highest classification accuracy was extracted.
- (2)
- To address the issue that current event detection algorithms are not suitable for detecting the power characteristics of PV devices, which have long rise times and large fluctuations, a sliding-window two-sided CUSUM event detection algorithm considering the time threshold was proposed. The Gaussian function, sigmoid function, and volatility criteria were utilized to accurately obtain real-time behavior time windows of PVs, enabling the real-time and accurate judgment of PV events.
- (3)
- A TCN model with attention mechanisms was proposed. Feature combination and balance weights were employed to accurately perceive and identify the behavior of residential PV systems. The effectiveness and superiority of the proposed method were validated using a custom-designed non-intrusive platform.
2. Non-Intrusive Residential PV Recognition Process
3. Feature Selection and Ranking of PV Devices
3.1. Feature Analysis of PV Devices
3.2. Semi-Fisher Score Method
3.3. MIC Method
3.4. Methods for Feature Selection and Ranking
4. Sliding-Window Two-Sided CUSUM Event Detection Algorithm Considering the Time Threshold
5. Identification Model of TCN with Attention Mechanisms
5.1. Concatenated Attention Mechanism
5.2. Temporal Convolutional Network
- (1)
- TCN Model
- (2)
- Dilated Causal Convolution
- (3)
- Residual Block
5.3. Framework of TCN Model with Attention Mechanisms
6. Example Verification and Analysis
6.1. Hardware Environment and Experimental Platform
6.2. Data Set Selection
6.3. Evaluation Indicators
6.4. Validation of Event Detection Performance
6.5. Validation of Feature Selection and Ranking Methods
6.6. Validation of Classification Algorithms
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Acronyms | Fn | The n-th selected feature | |
| PV | Photovoltaic | Fs | The selected feature subset |
| TCN | Temporal convolutional network | Wm | The mean calculation window |
| MIC | maximal information coefficient | Wd | The transient detection window |
| CUSUM | cumulative sum | Nm, Nn | Length of the two windows |
| NILM | Non-intrusive load monitoring | Mm, Md | The power mean values of the two windows |
| GLRT | Generalized likelihood ratio test | The two-sided event cumulative sums | |
| GOF | Goodness-of-fit | β | The externally introduced noise |
| BIC | Bayesian information criterion | d | The time delay factor |
| SVM | Support vector machine | h | The cumulative and threshold values |
| RF | Random forest | Nmax | The maximum allowable delay in terms of the number of sampling points |
| KNN | K-nearest neighbors | Ts | The sampling interval |
| HMM | Hidden Markov models | Δt | The time difference between two consecutive events |
| KLE | Karhunen Loeve expansion | Tth | The given time threshold. |
| ANN | Artificial neural network | ui | The sampling point in the average value window |
| CNNs | Convolutional neural networks | uc | The position of the sampling point in the middle of the window |
| DCC | Dilated causal convolution | φ(ui) | The weight value |
| OCSVM | OneClass support vector machine | μgauss | The average value of the obtained Gaussian window |
| LSTM | Long short-term memory | μd | the middle value of the maximum width of the detection window |
| GRU | Gated recurrent unit | vi | The Position of each sampling point in the detection window |
| BP | Backpropagation | The detection window weights | |
| Indices | Cumulative and minimum thresholds | ||
| r | Index for features | The cumulative sum within a window | |
| i | Index for samples | Concatenated Attention Mechanism coefficient | |
| k | Index for the sampling time | Two feature vectors | |
| Paremeters | || | The concatenation operation | |
| δ, λ | Two control parameters | The single-layer feedforward neural network, parametrized by a weight vector | |
| W | An n by n weight matrix. | Final output for each feature | |
| σ | The Gaussian coefficient | N | The number of feature values |
| α | The coefficient for backward offset of the detection window weight | The normalized attention coefficients computed by the k-th attention mechanism | |
| e | The similarity coefficient | Dilated convolution operation for time series | |
| The corresponding input linear transformation’s weight matrix | The product of the step lengths of all previous layers | ||
| Variables | K | The specific value of the convolution kernel | |
| n | The number of samples in the sample set | The output value of the residual block | |
| c | The number of categories in the samples | The input value in Residual Block | |
| ni | The quantity of samples in the i-th class | Activation | The Activation function |
| μr | The mean value of all samples on the r-th feature | The proportion of correctly classified events among all detected events. | |
| , | The mean and variance of the r-th feature for samples in the i-th class | The proportion of all events that are detected. | |
| Vr | The variance score of the r-th feature | TP | The true positive |
| fri, frj | The r-th feature of the i-th and j-th samples | FP | The false positive |
| X, Y | Two sets of feature variables | FN | The false negative |
| xi, yi | The x-th and y-th features of the i-th sample | F1-score | The harmonic mean of precision and recall |
| I(X:Y) | The mutual information between X and Y | ti,real | The real occurrence time of the event |
| The redundancy between X and Y | The time error mean indicates the precision | ||
| p(x,y) | The joint probability density of variables X and Y | ti | the event occurrence time calculated by the event detection algorithm |
References
- United Nations Climate Change. The Paris Agreement. Available online: https://unfccc.int/process-and-meetings/the-paris-agreement/the-paris-agreement (accessed on 21 March 2021).
- Jäger-Waldau, A. Snapshot of photovoltaics—March 2021. EPJ Photovolt. 2021, 12, 7. [Google Scholar] [CrossRef]
- Mahato, G.C.; Choudhury, T.R.; Nayak, B.; Debnath, D.; Santra, S.B.; Misra, B. A review on high PV penetration on smart grid: Challenges and its mitigation using FPPT. In Proceedings of the 2021 1st International Conference on Power Electronics and Energy (ICPEE), Bhubaneswar, India, 2–3 January 2021; pp. 1–6. [Google Scholar]
- Amanipoor, A.; Golsorkhi, M.S.; Bayati, N.; Savaghebi, M. V-Iq Based Control Scheme for Mitigation of Transient Overvoltage in Distribution Feeders with High PV Penetration. IEEE Trans. Sustain. Energy 2022, 14, 283–296. [Google Scholar] [CrossRef]
- Li, Y.; Wang, R.; Yang, Z. Optimal Scheduling of Isolated Microgrids Using Automated Reinforcement Learning-Based Multi-Period Forecasting. IEEE Trans. Sustain. Energy 2022, 13, 159–169. [Google Scholar] [CrossRef]
- Hart, G.W. Nonintrusive appliance load monitoring. Proc. IEEE 1992, 80, 1870–1891. [Google Scholar] [CrossRef]
- Luo, D.; Norford, L.; Shaw, S.; Leeb, S.; Ashrae, T. Monitoring HVAC equipment electrical loads from a centralized location-methods and field test results. ASHRAE Trans. 2002, 108, 841–857. [Google Scholar]
- De Baets, L.; Ruyssinck, J.; Develder, C.; Dhaene, T.; Deschrijver, D. On the Bayesian optimization and robustness of event detection methods in NILM. Energy Build. 2017, 145, 57–66. [Google Scholar] [CrossRef]
- Ajmera, J.; McCowan, I.; Bourlard, H. Robust speaker change detection. IEEE Signal Process. Lett. 2004, 11, 649–651. [Google Scholar] [CrossRef]
- Lin, S.; Zhao, L.; Li, F.; Liu, Q.; Li, D.; Fu, Y. A nonintrusive load identification method for residential applications based on quadratic programming. Electr. Power Syst. Res. 2016, 133, 241–248. [Google Scholar] [CrossRef]
- Truong, C.; Oudre, L.; Vayatis, N. Selective review of offline change point detection methods. Signal Process. 2019, 167, 107299. [Google Scholar] [CrossRef]
- Cominola, A.; Giuliani, M.; Piga, D.; Castelletti, A.; Rizzoli, A. A Hybrid Signature-based Iterative Disaggregation algorithm for Non-Intrusive Load Monitoring. Appl. Energy 2017, 185, 331–344. [Google Scholar] [CrossRef]
- Lindahl, P.A.; Ali, M.T.; Armstrong, P.; Aboulian, A.; Donnal, J.; Norford, L.; Leeb, S.B. Nonintrusive Load Monitoring of Variable Speed Drive Cooling Systems. IEEE Access 2020, 8, 211451–211463. [Google Scholar] [CrossRef]
- Liu, Y.C.; Wang, X.; You, W. Non-intrusive load monitoring by voltage-current trajectory enabled transfer learning. IEEE Trans. Smart Grid 2019, 10, 5609–5619. [Google Scholar] [CrossRef]
- Tayal, A.; Dewan, L.; Lather, J.S. Artificial neural network based source identification producing harmonic pollution in the electric network. In Advances in Renewable Energy and Sustainable Environment; Dewan, L., Bansal, R.C., Kalla, U.K., Eds.; Springer: Singapore, 2021; pp. 49–58. [Google Scholar]
- Lee, D. Phase noise as power characteristic of individual appliance for non-intrusive load monitoring. Electron. Lett. 2018, 54, 993–995. [Google Scholar] [CrossRef]
- Drouaz, M.; Colicchio, B.; Moukadem, A.; Dieterlen, A.; Ould-Abdeslam, D. New Time-Frequency Transient Features for Nonintrusive Load Monitoring. Energies 2021, 14, 1437. [Google Scholar] [CrossRef]
- Hernandez, A.S.; Ballado, A.H.; Heredia, A.P.D. Development of a non-intrusive load monitoring (NILM) with unknown loads using support vector machine. In Proceedings of the 2021 IEEE International Conference on Automatic Control & Intelligent Systems (I2CACIS), Shah Alam, Malaysia, 26 June 2021; pp. 203–207. [Google Scholar] [CrossRef]
- Dufour, L.; Genoud, D.; Jara, A.; Treboux, J.; Ladevie, B.; Bezian, J.-J. A non-intrusive model to predict the exible energy in a residential building. In Proceedings of the 2015 IEEE Wireless Communications and Networking Conference Workshops (WCNCW), New Orleans, LA, USA, 9–12 March 2015; pp. 69–74. [Google Scholar] [CrossRef]
- Wu, X.; Gao, Y.; Jiao, D. Multi-Label Classification Based on Random Forest Algorithm for Non-Intrusive Load Monitoring System. Processes 2019, 7, 337. [Google Scholar] [CrossRef]
- Yang, C.C.; Soh, C.S.; Yap, V.V. A systematic approach in load disaggregation utilizing a multi-stage classification algorithm for consumer electrical appliances classification. Front. Energy 2019, 13, 386–398. [Google Scholar] [CrossRef]
- Kelly, J.; Knottenbelt, W.J. Neural NILM: Deep Neural Networks Applied to Energy Disaggregation; Springer International Publishing: Cham, Switzerland, 2015. [Google Scholar]
- Garcia-Perez, D.; Perez-Lopez, D.; Diaz-Blanco, I.; Gonzalez-Muniz, A.; Dominguez-Gonzalez, M.; Vega, A.A.C. Fully-Convolutional Denoising Auto-Encoders for NILM in Large Non-Residential Buildings. IEEE Trans. Smart Grid 2021, 12, 2722–2731. [Google Scholar] [CrossRef]
- Çimen, H.; Wu, Y.; Wu, Y.; Terriche, Y.; Vasquez, J.C.; Guerrero, J.M. Deep learning-based probabilistic autoencoder for residential energy disaggregation: An adversarial approach. IEEE Trans. Ind. Inform. 2022, 18, 8399–8408. [Google Scholar] [CrossRef]
- Norford, L.K.; Leeb, S.B. Non-intrusive electrical load monitoring in commercial buildings based on steady-state and transient load-detection algorithms. Energy Build. 1996, 24, 51–64. [Google Scholar] [CrossRef]
- Enríquez, R.; Jiménez, M.; Heras, M. Towards non-intrusive thermal load Monitoring of buildings: BES calibration. Appl. Energy 2017, 191, 44–54. [Google Scholar] [CrossRef]
- Xiang, Y.; Liu, J.; Li, R.; Li, F.; Gu, C.; Tang, S. Economic planning of electric vehicle charging stations considering traffic constraints and load profile templates. Appl. Energy 2016, 178, 647–659. [Google Scholar] [CrossRef]
- Dinesh, C.; Welikala, S.; Liyanage, Y.; Ekanayake, M.P.B.; Godaliyadda, R.I.; Ekanayake, J. Non-intrusive load monitoring under residential solar power influx. Appl. Energy 2017, 205, 1068–1080. [Google Scholar] [CrossRef]
- Jaramillo, A.F.M.; Laverty, D.M.; Rincon, J.M.D.; Brogan, P.; Morrow, D.J. Non-intrusive load monitoring algorithm for PV identification in the residential sector. In Proceedings of the 31st Irish Signals and Systems Conference (ISSC), Letterkenny, Ireland, 11–12 June 2020. [Google Scholar]
- Jaramillo, A.M.F.; Lopez-Lorente, J.; Laverty, D.M. Effective identification of distributed energy resources using smart meter net-demand data. IET Smart Grid 2022, 5, 120–135. [Google Scholar] [CrossRef]
- Vavouris, A.; Garside, B.; Stankovic, L.; Stankovic, V. Low-Frequency Non-Intrusive Load Monitoring of Electric Vehicles in Houses with Solar Generation: Generalisability and Transferability. Energies 2022, 15, 2200. [Google Scholar] [CrossRef]
- Zhang, Y.; Qian, W.; Ye, Y.; Li, Y.; Tang, Y.; Long, Y.; Duan, M. A novel non-intrusive load monitoring method based on ResNet-seq2seq networks for energy disaggregation of distributed energy resources integrated with residential houses. Appl. Energy 2023, 349, 121703. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, C.; Ling, Q.; Zhao, X.; Gao, S.; Huang, X. Toward smart distributed renewable generation via multi-uncertainty featured non-intrusive interactive energy monitoring. Appl. Energy 2021, 303, 117689. [Google Scholar] [CrossRef]
- Sun, Q.; Liu, Y.; Hu, J.; Hu, X. Non-intrusive We-energy Modeling Based on GAN Technology. Proc. CSEE 2020, 40, 6784–6794. [Google Scholar] [CrossRef]
- Murtaza, A.F.; Sher, H.A. A Reconfiguration Circuit to Boost the Output Power of a Partially Shaded PV String. Energies 2023, 16, 622. [Google Scholar] [CrossRef]
- Murtaza, A.F.; Sher, H.A.; Khan, F.U.; Nasir, A.; Spertino, F. Efficient MPP Tracking of Photovoltaic (PV) Array Through Modified Boost Converter With Simple SMC Voltage Regulator. IEEE Trans. Sustain. Energy 2022, 13, 1790–1801. [Google Scholar] [CrossRef]
- Tsuda, K.; Kawanabe, M.; Müller, K.R. Clustering with the fisher score. In Proceedings of the Advances in Neural Information Processing Systems 15, NIPS 2002, Vancouver, BC, Canada, 9–14 December 2002; pp. 745–752. [Google Scholar]
- Yang, M.; Chen, Y.; Ji, G. Semi-Fisher Score: A Semi-Supervised Method for Feature Selection//Proc of International Conference on Machine Learning and Cybernetics; IEEE Press: Piscataway, NJ, USA, 2010; pp. 527–532. [Google Scholar]
- Reshef, Y.A.; Reshef, D.N.; Finucane, H.K.; Sabeti, P.C.; Mitzenmacher, M. Measuring dependence powerfully and equitably. J. Mach. Learn. Res. 2016, 17, 7406–7468. [Google Scholar]
- Reshef, D.N.; Reshef, Y.A.; Finucane, H.K.; Grossman, S.R.; McVean, G.; Turnbaugh, P.J.; Lander, E.S.; Mitzenmacher, M.; Sabeti, P.C. Detecting Novel Associations in Large Data Sets. Science 2011, 334, 1518–1524. [Google Scholar] [CrossRef] [PubMed]
- Romero-Cadaval, E.; Spagnuolo, G.; Franquelo, L.G.; Ramos-Paja, C.A.; Suntio, T.; Xiao, W.M. Grid-Connected Photovoltaic Generation Plants: Components and Operation. IEEE Ind. Electron. Mag. 2013, 7, 6–20. [Google Scholar] [CrossRef]
- Bai, S.; Kolter, J.; Koltun, V. An Empirical Evaluation of Generic Convolutional and Recurrent Networks for Sequence Modelling [EB/OL]. Available online: https://arxiv.org/abs/1803.01271v1 (accessed on 16 May 2018).
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. In Proceedings of the Advances in Neural Information Processing Systems 30 (NIPS 2017), Long Beach, CA, USA, 4–9 December 2017. [Google Scholar]
- Veličković, P.; Cucurull, G.; Casanova, A.; Romero, A.; Lio, P.; Bengio, Y. Graph Attention Networks. In Proceedings of the International Conference on Learning Representations (ICLR), Vancouver, BC, Canada, 30 April–3 May 2018. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition [EB/OL]. 2015. Available online: https://arxiv.org/abs/1512.03385 (accessed on 25 August 2023).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature ID | Feature Name |
|---|---|
| A1 | Active power |
| A2 | Reactive power |
| A3 | Current Amplitude |
| A4 | Current Total Harmonic Distortion |
| A5 | Current 3rd harmonic amplitude |
| A6 | Current 5th harmonic amplitude |
| A7 | Current 7th harmonic amplitude |
| A8 | Current Pulse Peak |
| A9 | Voltage amplitude |
| Equipment Type | Brand Model | Rated Power/kW |
|---|---|---|
| PV equipment | CHINT CPS SCA36KTL-DO-480, Chint Power Systems America, Richardson, TX, USA | 5 |
| Air conditioner | Gree RF7.2WQ/NhA-N3JY01, Gree Electric, Zhuhai, China | 2 |
| Electric kettle | PHILIPS HD9316, Philips, Amsterdam, The Netherlands | 1.8 |
| Microwaves | GalanZ G80F23CN2P-B5(RO), Galanz, Foshan, China | 1.5 |
| Refrigerator | Hisense BCD-183FH, Hisense, Qingdao, China | 0.52 |
| Lighting | OPPLE, Suzhou, China | 0.1 |
| BIC | Hotelling T2 | CUSUM | Improved CUSUM | |
|---|---|---|---|---|
| PR | 0.889 | 0.729 | 0.946 | 0.976 |
| Recall | 0.891 | 0.965 | 0.912 | 0.985 |
| F1 | 0.890 | 0.831 | 0.929 | 0.980 |
| TMAE/s | 0.328 | 0.456 | 0.147 | 0.029 |
| Algorithm | Identification Accuracy/% | Number of Feature Subsets |
|---|---|---|
| TCN model with attention mechanisms | 98.32 | 4 |
| GRU | 92.21 | 6 |
| LSTM | 93.06 | 6 |
| CNNs | 93.45 | 5 |
| BP | 91.83 | 5 |
| OCSVM | 86.23 | 6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ni, Y.; Xia, Y.; Li, Z.; Feng, Q. A Non-Intrusive Identification Approach for Residential Photovoltaic Systems Using Transient Features and TCN with Attention Mechanisms. Sustainability 2023, 15, 14865. https://doi.org/10.3390/su152014865
Ni Y, Xia Y, Li Z, Feng Q. A Non-Intrusive Identification Approach for Residential Photovoltaic Systems Using Transient Features and TCN with Attention Mechanisms. Sustainability. 2023; 15(20):14865. https://doi.org/10.3390/su152014865
Chicago/Turabian StyleNi, Yini, Yanghong Xia, Zichen Li, and Qifan Feng. 2023. "A Non-Intrusive Identification Approach for Residential Photovoltaic Systems Using Transient Features and TCN with Attention Mechanisms" Sustainability 15, no. 20: 14865. https://doi.org/10.3390/su152014865
APA StyleNi, Y., Xia, Y., Li, Z., & Feng, Q. (2023). A Non-Intrusive Identification Approach for Residential Photovoltaic Systems Using Transient Features and TCN with Attention Mechanisms. Sustainability, 15(20), 14865. https://doi.org/10.3390/su152014865