
New Technologies to Assess and Map an Urban Riparian Area in Drama, Greece, and Determine Opportunity Sites for Litter Traps





Abstract
:
1. Introduction
2. Materials and Methods
2.1. The Study Area
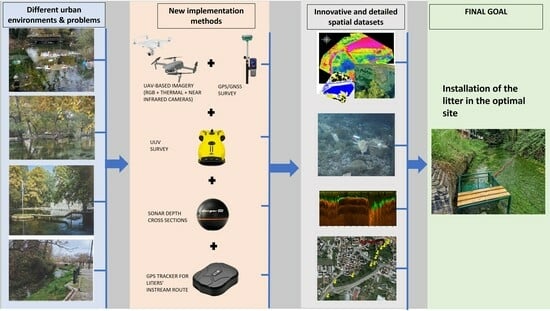
2.2. Assessment and Mapping Approaches, Tools, and Software
2.2.1. The UAV “DJI Phantom 4 Pro”
2.2.2. The UAV “DJI Enterprise Advanced”
2.2.3. The Photogrammetric Software “Pix4D 4.5.6.”
2.2.4. The Photogrammetric Software “OpenDroneMap”
2.2.5. The Spatial Analysis Software “ArcGIS”
2.2.6. The Software “Thermal Analysis Tool 2”
2.2.7. The GPS/GNSS—RUIDE PULSAR R6P
2.2.8. The UUV
2.2.9. The GPS Tracker
2.2.10. The Sonar Device
2.3. Litter Trap—Determine Opportunity Sites
3. Results
3.1. Orthomosaic RGB—General Characteristics
3.2. Digital Surface Model (DSM)
3.3. NDVI
3.4. Thermal Orthomosaic
3.5. Unmanned Underwater Vehicle
3.6. GPS Tracker
3.7. Sonar Results—Optimal Litter Trap Location
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the unmanned aerial vehicles (UAVs): A comprehensive review. Drones 2022, 6, 147. [Google Scholar] [CrossRef]
- Cai, G.; Dias, J.; Seneviratne, L. A survey of small-scale unmanned aerial vehicles: Recent advances and future development trends. Unmanned Syst. 2014, 2, 175–199. [Google Scholar] [CrossRef]
- Estrada, M.A.R.; Ndoma, A. The uses of unmanned aerial vehicles–UAV’s-(or drones) in social logistic: Natural disasters response and humanitarian relief aid. Procedia Comput. Sci. 2019, 149, 375–383. [Google Scholar] [CrossRef]
- Zohdi, T. The Game of Drones: Rapid agent-based machine-learning models for multi-UAV path planning. Comput. Mech. 2020, 65, 217–228. [Google Scholar] [CrossRef]
- Vélez-Nicolás, M.; García-López, S.; Barbero, L.; Ruiz-Ortiz, V.; Sánchez-Bellón, Á. Applications of unmanned aerial systems (UASs) in hydrology: A review. Remote Sens. 2021, 13, 1359. [Google Scholar] [CrossRef]
- Koutalakis, P.; Tzoraki, O.; Zaimes, G. UAVs for hydrologic scopes: Application of a low-cost UAV to estimate surface water velocity by using three different image-based methods. Drones 2019, 3, 14. [Google Scholar] [CrossRef]
- Fujita, I.; Notoya, Y.; Tani, K.; Tateguchi, S. Efficient and accurate estimation of water surface velocity in STIV. Environ. Fluid Mech. 2019, 19, 1363–1378. [Google Scholar] [CrossRef]
- Ridolfi, E.; Manciola, P. Water level measurements from drones: A pilot case study at a dam site. Water 2018, 10, 297. [Google Scholar] [CrossRef]
- Koutalakis, P.; Zaimes, G.N. River Flow Measurements Utilizing UAV-Based Surface Velocimetry and Bathymetry Coupled with Sonar. Hydrology 2022, 9, 148. [Google Scholar] [CrossRef]
- Handcock, R.N.; Torgersen, C.E.; Cherkauer, K.A.; Gillespie, A.R.; Tockner, K.; Faux, R.; Tan, J.; Carbonneau, P.E. Thermal infrared remote sensing of water temperature in riverine landscapes. In Fluvial Remote Sensing for Science and Management; John Wiley & Sons: New York, NY, USA, 2012; pp. 85–113. [Google Scholar]
- Kislik, C.; Dronova, I.; Kelly, M. UAVs in support of algal bloom research: A review of current applications and future opportunities. Drones 2018, 2, 35. [Google Scholar] [CrossRef]
- Lally, H.T.; O’Connor, I.; Jensen, O.P.; Graham, C.T. Can drones be used to conduct water sampling in aquatic environments? A review. Sci. Total Environ. 2019, 670, 569–575. [Google Scholar] [CrossRef]
- Adão, T.; Hruška, J.; Pádua, L.; Bessa, J.; Peres, E.; Morais, R.; Sousa, J.J. Hyperspectral imaging: A review on UAV-based sensors, data processing and applications for agriculture and forestry. Remote Sens. 2017, 9, 1110. [Google Scholar] [CrossRef]
- Rivas Casado, M.; Ballesteros Gonzalez, R.; Kriechbaumer, T.; Veal, A. Automated identification of river hydromorphological features using UAV high resolution aerial imagery. Sensors 2015, 15, 27969–27989. [Google Scholar] [CrossRef]
- Latsiou, A.; Kouvarda, T.; Stefanidis, K.; Papaioannou, G.; Gritzalis, K.; Dimitriou, E. Pressures and status of the riparian vegetation in Greek rivers: Overview and preliminary assessment. Hydrology 2021, 8, 55. [Google Scholar] [CrossRef]
- Antoine, R.; Lopez, T.; Tanguy, M.; Lissak, C.; Gailler, L.; Labazuy, P.; Fauchard, C. Geoscientists in the sky: Unmanned aerial vehicles responding to geohazards. Surv. Geophys. 2020, 41, 1285–1321. [Google Scholar] [CrossRef]
- Erdelj, M.; Natalizio, E.; Chowdhury, K.R.; Akyildiz, I.F. Help from the sky: Leveraging UAVs for disaster management. IEEE Pervasive Comput. 2017, 16, 24–32. [Google Scholar] [CrossRef]
- Watson, S.; Duecker, D.A.; Groves, K. Localisation of unmanned underwater vehicles (UUVs) in complex and confined environments: A review. Sensors 2020, 20, 6203. [Google Scholar] [CrossRef]
- Kalwa, J.; Tietjen, D.; Carreiro-Silva, M.; Fontes, J.; Brignone, L.; Gracias, N.; Ridao, P.; Pfingsthorn, M.; Birk, A.; Glotzbach, T.; et al. The european project morph: Distributed uuv systems for multimodal, 3d underwater surveys. Mar. Technol. Soc. J. 2016, 50, 26–41. [Google Scholar] [CrossRef]
- Mahrad, B.E.; Newton, A.; Icely, J.D.; Kacimi, I.; Abalansa, S.; Snoussi, M. Contribution of remote sensing technologies to a holistic coastal and marine environmental management framework: A review. Remote Sens. 2020, 12, 2313. [Google Scholar] [CrossRef]
- Basu, S.; Ahmed, A.; Debnath, A. Hydrone: IoT enabled Autonomous Underwater Vehicle for Aquatic Ecosystem Monitoring. In Applications of Machine Intelligence in Engineering, 1st ed.; Mandal, J.K., SMisra, S., Banerjee, J.S., Nayak, S., Eds.; CRC Press: Boca Raton, FL, USA, 2022; pp. 591–598. [Google Scholar]
- Naiman, R.J.; Decamps, H. The ecology of interfaces: Riparian zones. Annu. Rev. Ecol. Evol. Syst. 1997, 28, 621–658. [Google Scholar] [CrossRef]
- Zaimes, G.N.; Iakovoglou, V. Assessing riparian areas of Greece—An overview. Sustainability 2020, 13, 309. [Google Scholar] [CrossRef]
- Monk, W.A.; Compson, Z.G.; Choung, C.B.; Korbel, K.L.; Rideout, N.K.; Baird, D.J. Urbanisation of floodplain ecosystems: Weight-of-evidence and network meta-analysis elucidate multiple stressor pathways. Sci. Total Environ. 2019, 684, 741–752. [Google Scholar] [CrossRef] [PubMed]
- Chiu, M.-C.; Leigh, C.; Mazor, R.; Cid, N.; Resh, V. Anthropogenic threats to intermittent rivers and ephemeral streams. In Intermittent Rivers and Ephemeral Streams: Ecology and Management; Datry, T., Bonada, N., Boulton, A.J., Eds.; Elsevier, Inc.: Cambridge, MA, USA, 2017; pp. 433–454. [Google Scholar]
- Iakovoglou, V.; Zaimes, G.N.; Gounaridis, D. Riparian areas in urban settings: Two case studies from Greece. Int. J. Innov. Sustain. Dev. 2013, 7, 271–288. [Google Scholar] [CrossRef]
- Barnosky, A.D.; Hadly, E.A.; Bascompte, J.; Berlow, E.L.; Brown, J.H.; Fortelius, M.; Getz, W.M.; Harte, J.; Hastings, A.; Marquet, P.A.; et al. Approaching a state shift in Earth’s biosphere. Nature 2012, 486, 52–58. [Google Scholar] [CrossRef] [PubMed]
- Cao, Y.; Natuhara, Y. Effect of Urbanization on Vegetation in Riparian Area: Plant Communities in Artificial and Semi-Natural Habitats. Sustainability 2020, 12, 204. [Google Scholar] [CrossRef]
- White, M.D.; Greer, K.A. The effects of watershed urbanization on the stream hydrology and riparian vegetation of Los Peñasquitos Creek, California. Landsc. Urban Plan. 2006, 74, 125–138. [Google Scholar] [CrossRef]
- Barboza, L.G.A.; Cózar, A.; Gimenez, B.C.G.; Barros, T.B.; Kershaw, P.J.; Guilhermino, L. Chapter 17—Macroplastics Pollution in the Marine Environment. In World Seas: An Environmental Evaluation, 2nd ed.; Sheppard, C., Ed.; Academic Press: Cambridge, MA, USA, 2019; pp. 305–328. [Google Scholar]
- Anik, A.H.; Hossain, S.; Alam, M.; Sultan, M.B.; Hasnine, M.D.T.; Rahman, M.M. Microplastics pollution: A comprehensive review on the sources, fates, effects, and potential remediation. Environ. Nanotechnol. Monit. Manag. 2021, 16, 100530. [Google Scholar]
- Stella, J.C.; Rodríguez-González, P.M.; Dufour, S.; Bendix, J. Riparian vegetation research in Mediterranean-climate regions: Common patterns, ecological processes, and considerations for management. Hydrobiologia 2013, 719, 291–315. [Google Scholar] [CrossRef]
- González, E.; Sher, A.A.; Tabacchi, E.; Masip, A.; Poulin, M. Restoration of riparian vegetation: A global review of implementation and evaluation approaches in the international, peer-reviewed literature. J. Environ. Manag. 2015, 158, 85–94. [Google Scholar] [CrossRef]
- Haase, D. Urban Wetlands and Riparian Forests as a Nature-Based Solution for Climate Change Adaptation in Cities and Their Surroundings. In Nature-Based Solutions to Climate Change Adaptation in Urban Areas—Linkages between Science, Policy and Practice; Theory and Practice of Urban Sustainability Transitions; Kabisch, N., Korn, H., Stadler, J., Bonn, A., Eds.; Springer: Cham, Switzerland, 2017; pp. 111–122. [Google Scholar]
- Koutsovili, E.I.; Tzoraki, O.; Kalli, A.A.; Provatas, S.; Gaganis, P. Participatory approaches for planning nature-based solutions in flood vulnerable landscapes. Environ. Sci. Policy 2023, 140, 12–23. [Google Scholar] [CrossRef]
- Lemes de Oliveira, F.; do Carmo de Lima Bezerra, M.; Teba, T.; Oliveira, A.d.N. The Environment-Culture-Technology Nexus Framework: An Approach for Assessing the Challenges and Opportunities for Implementing Nature-Based Solutions in Brazil. In Nature-Based Solutions for Sustainable Urban Planning; Contemporary Urban Design Thinking; Mahmoud, I.H., Morello, E., Lemes de Oliveira, F., Geneletti, D., Eds.; Springer: Cham, Switzerland, 2022; pp. 69–102. [Google Scholar]
- Raymond, C.M.; Frantzeskaki, N.; Kabisch, N.; Berry, P.; Breil, M.; Nita, M.R.; Geneletti, D.; Calfapietra, C. A framework for assessing and implementing the co-benefits of nature-based solutions in urban areas. Environ. Sci. Policy 2017, 77, 15–24. [Google Scholar] [CrossRef]
- Mahmoud, I.H.; Morello, E.; Vona, C.; Benciolini, M.; Sejdullahu, I.; Trentin, M.; Pascual, K.H. Setting the social monitoring framework for nature-based solutions impact: Methodological approach and pre-greening measurements in the case study from CLEVER cities Milan. Sustainability 2021, 13, 9672. [Google Scholar] [CrossRef]
- Frantzeskaki, N.; Mahmoud, I.H.; Morello, E. Nature-Based Solutions for Resilient and Thriving Cities: Opportunities and Challenges for Planning Future Cities. In Nature-Based Solutions for Sustainable Urban Planning; Contemporary Urban Design Thinking; Mahmoud, I.H., Morello, E., Lemes de Oliveira, F., Geneletti, D., Eds.; Springer: Cham, Switzerland, 2022; pp. 3–17. [Google Scholar]
- Arif, M.; Behzad, H.M.; Tahir, M.; Li, C. The impact of ecotourism on ecosystem functioning along main rivers and tributaries: Implications for management and policy changes. J. Environ. Manag. 2022, 320, 115849. [Google Scholar] [CrossRef]
- Hellenic Statistical Authority—Census 2021. Available online: https://www.statistics.gr/2021-census-pop-hous-results (accessed on 15 March 2023).
- AgroCam NDVI Camera. Available online: https://www.agrocam.eu/ (accessed on 25 January 2023).
- Duffy, J.P.; Pratt, L.; Anderson, K.; Land, P.E.; Shutler, J.D. Spatial assessment of intertidal seagrass meadows using optical imaging systems and a lightweight drone. Estuar. Coast. Shelf Sci. 2018, 200, 169–180. [Google Scholar] [CrossRef]
- Darettamarlan, R.R.; Hidayat, H.; Darminto, M.R. Correlation analysis of Land Surface Temperature (LST) measurement using DJI Mavic Enterprise Dual Thermal and Landsat 8 Satellite Imagery (case study: Surabaya City). IOP Conf. Ser. Earth Environ. Sci. 2021, 936, 012037. [Google Scholar] [CrossRef]
- Metcalfe, M.W. Investigating the Potential for Hazard Tree Identification Using Thermal Imagery from the DJI Mavic 2 Enterprise Dual. Bachelor’s Thesis, Lakehead University, Thunder Bay, ON, USA, 2019. [Google Scholar]
- Aliane, N.; Muñoz, C.Q.G.; Sánchez-Soriano, J. Web and MATLAB-Based Platform for UAV Flight Management and Multispectral Image Processing. Sensors 2022, 22, 4243. [Google Scholar] [CrossRef]
- Huang, S.; Tang, L.; Hupy, J.P.; Wang, Y.; Shao, G. A commentary review on the use of normalized difference vegetation index (NDVI) in the era of popular remote sensing. J. For. Res. 2021, 32, 1–6. [Google Scholar] [CrossRef]
- Meneses-Tovar, C.L. NDVI as indicator of degradation. Unasylva 2011, 62, 39–46. [Google Scholar]
- Vacca, G. Overview of open source software for close range photogrammetry. In Proceedings of the 2019 Free and Open Source Software for Geospatial, FOSS4G 2019 of International Society for Photogrammetry and Remote Sensing, Bucharest, Romania, 26–30 August 2019. [Google Scholar]
- Drone Mapping Software—OpenDroneMap. Available online: http://opendronemap.org/ (accessed on 25 January 2023).
- Palma, M.; Rivas Casado, M.; Pantaleo, U.; Cerrano, C. High resolution orthomosaics of African coral reefs: A tool for wide-scale benthic monitoring. Remote Sens. 2017, 9, 705. [Google Scholar] [CrossRef]
- DJI Thermal Analysis Tool 2.1. Available online: https://www.dji.com/gr/downloads/softwares/dji-dtat2 (accessed on 25 January 2023).
- Rodríguez, M.V.; Melgar, S.G.; Márquez, J.M.A. Assessment of aerial thermography as a method of in situ measurement of radiant heat transfer in urban public spaces. Sustain. Cities Soc. 2022, 87, 104228. [Google Scholar] [CrossRef]
- RUIDE PULSAR R6p. Available online: https://www.ruide.xyz/r6p (accessed on 25 January 2023).
- Han, X.; Thomasson, J.A.; Xiang, Y.; Gharakhani, H.; Yadav, P.K.; Rooney, W.L. Multifunctional ground control points with a wireless network for communication with a UAV. Sensors 2019, 19, 2852. [Google Scholar] [CrossRef]
- NEMO Underwater Drone. Available online: https://hse-uav.com/products/nemo-underwater-drone (accessed on 25 January 2023).
- Allotta, B.; Brandani, L.; Casagli, N.; Costanzi, R.; Mugnai, F.; Monni, N.; Natalini, M.; Ridolfi, A. Development of Nemo remotely operated underwater vehicle for the inspection of the Costa Concordia wreck. J. Eng. Marit. Environ. 2017, 231, 3–18. [Google Scholar] [CrossRef]
- Deeper Sonar PRO+. Available online: https://deepersonar.com/us/en_us/products/deeper-smart-sonar-pro-plus (accessed on 25 January 2023).
- Beaumont, N.J.; Aanesen, M.; Austen, M.C.; Börger, T.; Clark, J.R.; Cole, M.; Hooper, T.; Lindeque, P.K.; Pascoe, C.; Wyles, K.J. Global ecological, social and economic impacts of marine plastic. Mar. Pollut. Bull. 2019, 142, 189–195. [Google Scholar] [CrossRef]
- Jambeck, J.R.; Geyer, R.; Wilcox, C.; Siegler, T.R.; Perryman, M.; Andrady, A.; Narayan, R.; Law, K.L. Plastic waste inputs from land into the ocean. Science 2015, 347, 768–771. [Google Scholar] [CrossRef]
- Battawi, A.; Mallon, E.; Vedral, A.; Sparks, E.; Ma, J.; Marufuzzaman, M. In-Stream Marine Litter Collection Device Location Determination Using Bayesian Network. Sustainability 2022, 14, 6147. [Google Scholar] [CrossRef]
- Geneletti, D.; Cortinovis, C.; Orta-Ortiz, M.S.; Kato-Huerta, J.; Longato, D.; Falco, E. Mainstreaming Nature-Based Solutions in Cities Through Performance-BasedPlanning: A Case Study in Trento, Italy. In Nature-Based Solutions for Sustainable Urban Planning; Contemporary Urban Design Thinking; Mahmoud, I.H., Morello, E., Lemes de Oliveira, F., Geneletti, D., Eds.; Springer: Cham, Switzerland, 2022; pp. 19–46. [Google Scholar]
- Eisenbeiss, H.; Sauerbier, M. Investigation of UAV systems and flight modes for photogrammetric applications. Photogramm. Rec. 2011, 26, 400–421. [Google Scholar] [CrossRef]
- Mancini, F.; Salvini, R. Applications of photogrammetry for environmental research. ISPRS Int. J. Geo-Inf. 2019, 8, 542. [Google Scholar] [CrossRef]
- Rusnák, M.; Goga, T.; Michaleje, L.; Šulc Michalková, M.; Máčka, Z.; Bertalan, L.; Kidová, A. Remote Sensing of Riparian Ecosystems. Remote Sens. 2022, 14, 2645. [Google Scholar] [CrossRef]
- Dunford, R.; Michel, K.; Gagnage, M.; Piégay, H.; Trémelo, M.L. Potential and constraints of Unmanned Aerial Vehicle technology for the characterization of Mediterranean riparian forest. Int. J. Remote Sens. 2009, 30, 4915–4935. [Google Scholar] [CrossRef]
- Huylenbroeck, L.; Laslier, M.; Dufour, S.; Georges, B.; Lejeune, P.; Michez, A. Using remote sensing to characterize riparian vegetation: A review of available tools and perspectives for managers. J. Environ. Manag. 2020, 267, 110652. [Google Scholar] [CrossRef] [PubMed]
- Lobo Torres, D.; Queiroz Feitosa, R.; Nigri Happ, P.; Cué La Rosa, E.L.; Marcato Junior, J.; Martins, J.; Olã Bressan, P.; Nunes Gonçalves, W.; Liesenberg, V. Applying fully convolutional architectures for semantic segmentation of a single tree species in urban environment on high resolution UAV optical imagery. Sensors 2020, 20, 563. [Google Scholar] [CrossRef]
- Sessanna, R.; Iavorivska, L.; Kelleher, C. Applying multispectral UAV imagery to delineate in and near stream cover along a small urban stream. River Res. Appl. 2022, 38, 717–726. [Google Scholar] [CrossRef]
- Langhammer, J. UAV monitoring of stream restorations. Hydrology 2019, 6, 29. [Google Scholar] [CrossRef]
- Dimitriou, E.; Stavroulaki, E. Assessment of riverine morphology and habitat regime using unmanned aerial vehicles in a Mediterranean environment. Pure Appl. Geoph. 2018, 175, 3247–3261. [Google Scholar] [CrossRef]
- Andraši, P.; Radišić, T.; Muštra, M.; Ivošević, J. Night-time detection of uavs using thermal infrared camera. Transp. Res. Proc. 2017, 28, 183–190. [Google Scholar] [CrossRef]
- Goddijn-Murphy, L.; Williamson, B.J.; McIlvenny, J.; Corradi, P. Using a UAV thermal infrared camera for monitoring floating marine plastic litter. Remote Sens. 2022, 14, 3179. [Google Scholar] [CrossRef]
- Zaimes, G.N. Mediterranean riparian areas–climate change implications and recommendations. J. Environ. Biol. 2020, 41, 957–965. [Google Scholar] [CrossRef]
- Xie, Y.; Sha, Z.; Yu, M. Remote sensing imagery in vegetation mapping: A review. J Plant Ecol. 2008, 1, 9–23. [Google Scholar] [CrossRef]
- Boon, M.A.; Tesfamichael, S. Wetland vegetation integrity assessment with low altitude multispectral UAV imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2017, 42, 55. [Google Scholar] [CrossRef]
- Silva, T.S.; Costa, M.P.; Melack, J.M.; Novo, E.M. Remote sensing of aquatic vegetation: Theory and applications. Environ. Monit. Assess 2008, 140, 131–145. [Google Scholar] [CrossRef]
- Jamali, A.A.; Zarekia, S.; Keshavarz, S.R. Assessing climatic, edaphic, vegetation cover data, and their trends around cities located in desert environments using online remote sensing. Environ. Dev. Sustain. 2023. [Google Scholar] [CrossRef]
- Zaimes, G.N.; Tardio, G.; Iakovoglou, V.; Gimenez, M.; Garcia-Rodriguez, J.L.; Sangalli, P. New tools and approaches to promote soil and water bioengineering in the Mediterranean. Sci. Total Environ. 2019, 693, 133677. [Google Scholar] [CrossRef] [PubMed]
- Zaimes, G.Ν.; Tamparopoulos, A.E.; Tufekcioglu, M.; Schultz, R.C. Understanding stream bank erosion and deposition in Iowa, USA: A seven year study along streams in different regions with different riparian land-uses. J. Environ. Manag. 2021, 287, 112352. [Google Scholar] [CrossRef]
- Gkiatas, G.; Kasapidis, I.; Koutalakis, P.; Iakovoglou, V.; Savvopoulou, A.; Germantzidis, I.; Zaimes, G.N. Enhancing urban and sub-urban riparian areas through ecosystem services and ecotourism activities. Water Supply 2021, 21, 2974–2988. [Google Scholar] [CrossRef]
- Wong, P.P. A microclimate study of traffic and pedestrianization scenarios in a densely populated urban city. Adv. Meteorol. 2020, 2020, 8741049. [Google Scholar] [CrossRef]
- Krehbiel, C.P.; Jackson, T.; Henebry, G.M. Web-enabled Landsat data time series for monitoring urban heat island impacts on land surface phenology. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 9, 2043–2050. [Google Scholar] [CrossRef]
- Newman, G.; Sansom, G.T.; Yu, S.; Kirsch, K.R.; Li, D.; Kim, Y.; Horney, J.A.; Kim, G.; Musharrat, S. A Framework for Evaluating the Effects of Green Infrastructure in Mitigating Pollutant Transferal and Flood Events in Sunnyside, Houston, TX. Sustainability 2022, 14, 4247. [Google Scholar] [CrossRef]
- Haines, A.; Scheelbeek, P. European Green Deal: A major opportunity for health improvement. Lancet 2020, 395, 1327–1329. [Google Scholar] [CrossRef]
- Julienne, F.; Delorme, N.; Lagarde, F. From macroplastics to microplastics: Role of water in the fragmentation of polyethylene. Chemosphere 2019, 236, 124409. [Google Scholar] [CrossRef]
- Akdogan, Z.; Guven, B. Microplastics in the environment: A critical review of current understanding and identification of future research needs. Environ. Pollut. 2019, 254, 113011. [Google Scholar] [CrossRef]
- Tramoy, R.; Gasperi, J.; Colasse, L.; Silvestre, M.; Dubois, P.; Noûs, C.; Tassin, B. Transfer dynamics of macroplastics in estuaries–New insights from the Seine estuary: Part 2. Short-term dynamics based on GPS-trackers. Mar. Pollut. Bull. 2020, 160, 111566. [Google Scholar] [CrossRef] [PubMed]
- Nex, F.; Remondino, F. Preface: Latest developments, methodologies, and applications based on uav platforms. Drones 2019, 3, 26. [Google Scholar] [CrossRef]
- Let’s Launch the Right Boat This Year in the Waters of Agia Varvara. Available online: https://www.youtube.com/watch?v=rs48up3xrKg&ab_channel=ROOTSAMKE (accessed on 25 January 2023). (In Greek).
- Arif, M.; Jiajia, L.; Tahir, M.; Jie, Z.; Changxiao, L. Environmental literacy scenarios lead to land degradation and changes in riparian zones: Implications for policy in China. Land Degrad. Dev. 2022, 4450, 1–17. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location | Latitude | Longitude | Date (Day/Month/Year) | Time |
|---|---|---|---|---|
| 1 | 41°9′0.43″ | 24°8′31.26″ | 12 March 2022 | 10:00 |
| 2 | 41°8′59.93″ | 24°8′31.25″ | 12 March 2022 | 10:05 |
| 3 | 41°8′59.71″ | 24°8′30.49″ | 12 March 2022 | 10:10 |
| 4 | 41°8′59.02″ | 24°8′29.81″ | 12 March 2022 | 10:13 |
| 5 | 41°8′58.30″ | 24°8′28.68″ | 12 March 2022 | 10:20 |
| 6 | 41°8′56.92″ | 24°8′27.17″ | 12 March 2022 | 11:00 |
| 7 | 41°8′55.47″ | 24°8′26.49″ | 12 March 2022 | 11:02 |
| 8 | 41°8′53.74″ | 24°8′25.93″ | 12 March 2022 | 11:03 |
| 9 | 41°8′53.31″ | 24° 8′2 4.69″ | 12 March 2022 | 11:15 |
| 10 | 41°8′50.18″ | 24°8′17.97″ | 12 March 2022 | 11:17 |
| 11 | 41°8′48.40″ | 24°8′11.65″ | 12 March 2022 | 11:20 |
| 12 | 41°8′44.51″ | 24°8′9.14″ | 12 March 2022 | 11:27 |
| 13 | 41°8′40.15″ | 24°8′8.98″ | 12 March 2022 | 11:35 |
| 14 | 41°8′40.15″ | 24°8′7.62″ | 12 March 2022 | 11:37 |
| 15 | 41°8′33.49″ | 24°8′1.95″ | 12 March 2022 | 11:40 |
| 16 | 41°8′29.08″ | 24°8′0.11″ | 12 March 2022 | 11:44 |
| 17 | 41°8′24.97″ | 24°8′1.15″ | 12 March 2022 | 12:52 |
| 18 | 41°8′20.70″ | 24°7′59.22″ | 12 March 2022 | 13:20 |
| 19 | 41°8′13.32″ | 24°8′0.30″ | 12 March 2022 | 18:00 |
| 20 | 41°8′6.01″ | 24°7′52.34″ | 12 April 2022 | 19:20 |
| 21 | 41°7′45.97″ | 24°7′48.60″ | 12 May 2022 | 9:37 |
| 22 | 41°7′40.65″ | 24°7′42.39″ | 12 May 2022 | 10:00 |
| 23 | 41°7′36.41″ | 24°7′34.36″ | 12 May 2022 | 10:15 |
| 24 | 41°7′29.51″ | 24°7′26.52″ | 12 May 2022 | 10:26 |
| 25 | 41°7′17.44″ | 24°7′17.44″ | 12 June 2022 | 11:00 |
| 26 | 41°7′8.55″ | 24°7′9.76″ | 12 June 2022 | 14:39 |
| 27 | 41°6′57.42″ | 24°6′41.97″ | 12 June 2022 | 19:11 |
| 28 | 41°6′48.14″ | 24°6′28.60″ | 12 July 2022 | 09:33 |
| 29 | 41°6′44.01″ | 24°6′31.34″ | 12 July 2022 | 12:46 |
| 30 | 41°6′41.66″ | 24°6′32.58″ | 12 July 2022 | 15:51 |
| Location | UAV (RGB) Orthomosaic | UAV (RGB + NIR) DSM and NDVI | UAV (Thermal, RGB) + UUV | UUV + GPS Tracker | Sonar | ||
|---|---|---|---|---|---|---|---|
| Nr | Water Presence | Vegetation Density— Environmental Conditions | Infrastructure Proximity + Aesthetics | Wildlife Terrestrial Non Disturbance | Wildlife Underwater Non Disturbance | Litter Concentration | Cross-Sections Adequate Depth |
| 1 | ✓ | ✓ | ✗ | ✗ | ✓ | ✗ | - |
| 2 | ✓ | ✓ | ✗ | ✗ | ✓ | ✗ | - |
| 3 | ✓ | ✓ | ✗ | ✗ | ✓ | ✗ | - |
| 4 | ✓ | ✓ | ✓ | ✗ | ✓ | ✓ | ✓ |
| 5 | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| 6 | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| 7 | ✓ | ✓ | ✗ | ✓ | ✗ | ✗ | - |
| 8 | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| 9 | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ | - |
| 10 | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ | - |
| 11 | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ | - |
| 12 | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ | - |
| 13 | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ | - |
| 14 | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ | - |
| 15 | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ | - |
| 16 | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ | - |
| 17 | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ | - |
| 18 | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| 19 | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ | - |
| 20 | ✓ | ✗ | ✗ | ✓ | ✗ | ✓ | - |
| 21 | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ | - |
| 22 | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ | - |
| 23 | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ | - |
| 24 | ✓ | ✗ | ✗ | ✗ | ✓ | ✓ | - |
| 25 | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ | - |
| 26 | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ | - |
| 27 | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ | - |
| 28 | ✓ | ✗ | ✗ | ✗ | ✓ | ✓ | - |
| 29 | ✓ | ✗ | ✗ | ✓ | ✗ | ✗ | - |
| 30 | ✓ | ✗ | ✗ | ✓ | ✗ | ✗ | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koutalakis, P.; Gkiatas, G.; Iakovoglou, V.; Zaimes, G.N. New Technologies to Assess and Map an Urban Riparian Area in Drama, Greece, and Determine Opportunity Sites for Litter Traps. Sustainability 2023, 15, 15620. https://doi.org/10.3390/su152115620
Koutalakis P, Gkiatas G, Iakovoglou V, Zaimes GN. New Technologies to Assess and Map an Urban Riparian Area in Drama, Greece, and Determine Opportunity Sites for Litter Traps. Sustainability. 2023; 15(21):15620. https://doi.org/10.3390/su152115620
Chicago/Turabian StyleKoutalakis, Paschalis, Georgios Gkiatas, Valasia Iakovoglou, and George N. Zaimes. 2023. "New Technologies to Assess and Map an Urban Riparian Area in Drama, Greece, and Determine Opportunity Sites for Litter Traps" Sustainability 15, no. 21: 15620. https://doi.org/10.3390/su152115620
APA StyleKoutalakis, P., Gkiatas, G., Iakovoglou, V., & Zaimes, G. N. (2023). New Technologies to Assess and Map an Urban Riparian Area in Drama, Greece, and Determine Opportunity Sites for Litter Traps. Sustainability, 15(21), 15620. https://doi.org/10.3390/su152115620