Abstract
The excessive consumption of herbicides has gradually led to the herbicide resistance weed phenomenon. Managing herbicide resistance weeds can only be explicated by applying high-tech strategies such as artificial intelligence (AI)-based methods. We review here AI-based methods and tools against herbicide-resistant weeds. There are a few commercially available AI-based tools and technologies for controlling weed, as machine learning makes the classification process significantly easy, namely remote sensing, robotics, and spectral analysis. Although AI-based techniques make outstanding improvements against herbicide resistance weeds, there are still limited applications compared to the real potential of the methods due to the challenges. In this review, we identify the need for AI-based weed management against herbicide resistance, comparative evaluation of chemical vs. non-chemical management, advances in remote sensing, and AI technology for weed identification, mapping, and management. We anticipate the ideas will contribute as a forum for establishing and adopting proven AI-based technologies in controlling more weed species across the world.
1. Introduction
Weeds have always aggravated crop fields as any plant or group of plants with no economic importance compete for available resources for growth decreasing the agricultural value and productivity of the desirable crop population. They aggressively compete with the crop plant for nutrients, water, sunlight, air, etc., impacting the economic value of yield and productivity. Uncontrolled weeds result in a yield reduction of 34% worldwide [1]. It can significantly reduce crop yields by up to 50% in beans and corn, a 48–60% reduction in wheat, and a 50–75% reduction in sesame [2]. However, yield reduction is not the only negative impact of weeds on farm products; they can also decline product and harvest quality. For example, Bassia scoparia (commonly known as Kochia) is green at wheat harvest, bringing about poor harvest quality and contaminated wheat grain products [3]. In addition, weeds can emerge throughout the farming season due to frequent irrigation and abundant moisture for weed growing [4]. Therefore, weed management is a crucial and continuous agricultural task in small and large-scale lands for optimizing sustainable and economically viable agricultural productions. Cultivation, especially inter-row cultivation, manual weeding, herbicide application, and sustainable strategies are the main methods of weed management practiced on a commercial scale worldwide (Figure 1). Cultivation causes soil erosion, and deteriorating the soil health properties, Manual weeding is a labor-intensive job and due to labor shortage and high labor costs, the demand for efficient and precision weeding practices is remarkably increasing, while using herbicides has a huge negative impact on health and the environment and sustainable strategies are expensive and not affordable for all producers [5].
Figure 1.
Summary of weed management methods and their biggest challenge.
The first herbicides were introduced after the chemical revolution in agrochemical science in 1940. Since then, herbicides could effectively control weeds offering versatility and efficient production systems for farmers across the world [1,5]. Across the United States, annually, $26 billion is spent on herbicides [6]. Nevertheless, the excessive consumption of herbicides gradually has been leading to the herbicide resistance (HR) weed phenomenon, which was predicted in 1956 [7] and the first HR weed was reported in 1957 [1], that raised concerns and skepticism hindering development and use of herbicide to control unwanted plants in the field. Nowadays, many weed species have evolved into HR, and this trend continues nonstop. A list of these HR weeds and the kind of herbicides they show resistance to is provided on different resources (i.e., www.weedscience.org).
Unfortunately, the HR phenomenon is inevitable, though in order to delay it, farmers take some measures such as herbicide management, herbicide rotation, tillage, etc. [7,8,9,10]. Furthermore, herbicides (generally agrochemicals) can cause health problems for the labor operator who applies them to the farm, and the residue of the chemicals in the crop leads to chemically contaminated crops bringing about health problems for consumers. Inappropriate herbicide consumption damages crop yield. In addition, drifts and runoffs of the chemicals have severe impacts on the environment [5,6]. The world population will increase by up to 9 billion by 2050 [11]; therefore, in the long term, the existing weed management methods will not be capable of coping with the future challenges of HR weeds, the growing population needs, and other agroecological problems. Hence there is an urgent need for other sustainable methods to maintain productivity while simultaneously identifying methods and techniques.
The developing techniques in precision agriculture suggest high-tech strategies such as Artificial Intelligence (AI), machine learning, and deep learning techniques to manage weeds by using agrochemicals in optimized ways or not using them at all [6,12]. These techniques have opened the doors to site-specific weed management (SSWM) [6,13]. It means AI allows to integrate photogrammetry or image analysis to establish a database for developing algorithms to enable weed management using automated or robotic techniques to distinguish weeds from the crop plant [14,15,16] and HR weeds from herbicide-sensitive (HS) ones [17,18]. Uncrewed aerial vehicles (UAVs) or piloted aircraft can fly over large farm acreage to collect all the necessary weed data on a spatial scale, which is impossible or extremely hard to do by other mis technology, gives highly detailed information according to which the farmer can make precise and optimized decisions for controlling weed patches [19,20,21] Thus, integrating UAV datasets to train and test the AI algorithms is the future solution for weed mapping and management in large farms [19] Moreover, automated or mechanical weed control robots equipped with the specific ability for machine vision allow us to develop mechanisms for targeted weed control by spot spraying.
Weed early-stage management is the most effective strategy to avoid seed dispersal [11]. In contrast to shape-based machine vision, AI-based methods can effectively detect weeds in this stage as well as distinguish weeds from crop plants in dense vegetation fields [22,23]. Currently, the adoption of AI-based weed management, smart systems, and robotics are practically limited to early adopters due to the limited range of plants that can be detected based on spectral signatures or not precisely based on species or geocoordinates enough to protect the crop plant [23] To the authors’ best knowledge, other than the signaling method [24]), no weed or detection system is reported yet, with the same or nearly the same distinguishing power as human beings. However, the fluorescent substance used in the signaling methods to mark crop plants at the planting stage must be examined for harmful effects on the crop, the environment, and human health. Moreover, the signaling methods cannot be used in farms, especially organic ones, which use a direct sown system [25]. Therefore, researchers still have a long way to go to have a distinguishing system that works in the field.
In a weed control robotic system, AI is not only used in the distinguishing processes (image processing), but also it is used in trajectory planning, operation control, data management, data sharing, weed distribution prediction model, etc. [11,20]. It helps to immensely decrease herbicide use which is a significant step towards sustainable agriculture, preserving the environment, enhancing the consumers’ health, and declining production costs. It also plays a leading role in effectively controlling and managing the HR phenomenon [5,11,21,23,24]. The current AI under development phases could be expensive and hence less desirable in rural areas with low-income farms [11]. Generally, remote sensing data are in various forms to be interpreted to be used accurately for any decision systems. But its advantage is the ability to offer an instant response, which enables the robotic weed control systems to operate in real-time [2], making it a solution for the challenges of future agriculture.
This review article provides a forum to identify the use of artificial intelligence techniques for precise and sustainable weed management techniques by providing researchers with a holistic overview of HR weed management. We discuss the overview of herbicide resistance weed management, challenges, and opportunities of managing herbicide resistance weed; overview of AI-Based applications, weed mapping and classification; current and innovative tools and technologies to manage herbicide resistance weed.
2. Overview of Herbicide Resistance Weed Management
It is complicated to predict the reaction of weeds to applied herbicides as it depends on the weed species, applied herbicides, and crop management practices. This section presents statistical information about HR weeds and management strategies. Although there are some challenges to managing the HR weeds such as low adoption of resistance-avoidance tactics, lack of herbicides with new modes of action, and lack of field-specific decision support system (DSS) for weed management, there are some opportunities to apply advanced tools and technologies against HR weeds.
2.1. Herbicide Resistance in Weeds (HR)
While herbicides are the most reliant measure to control weeds in larger crop production systems, over-reliance on herbicides has created herbicide-resistant (HR) weeds that have incurred crop yield losses and global food insecurity [26] Moreover, as herbicide-resistant crops were introduced in the 1990s, the use of herbicides such as glyphosate increased simultaneously, which further contributed to HR in weeds [27]. Herbicide resistance has been related to the intense selection pressure exerted by herbicides resulting in adaptive weeds [27]. Weed species or biotype of weed species that was initially controlled by a specific herbicide is no longer controlled effectively and has been increasing rapidly worldwide [1]. Recurrent application of highly efficacious herbicides with the same site of action, annual prolific breeding weed species that occur at high population densities, and cropping systems that favor a few dominant weed species have been found to increase the risk for the evolution of HR weeds Beckie and Reboud, 2009; Vencill et al., 2012 [28,29]. As of 2021, globally, 266 species (153 dicots and 113 monocots) have evolved resistance to 21 of the 31 known herbicide sites of action and 165 different herbicides in 96 crops in 71 countries [30].
2.2. HR Weed Management Strategies
2.2.1. Traditional Weed Management Practices
Traditional weed management practices include physical, chemical, and biological. Physical control includes prevention of physical movement of weed seeds to clean areas by cleaning equipment, using clean seeds, preventing movement of plant reproductive structures by timely scouting of fields, and manual or mechanical controlling weeds that escape herbicidal control, among others [29] Chemical control includes the use of herbicides. Herbicide rotation and mixture have also been effective in reducing weeds’ HR traits [28] However, weed control in commercial production systems relies heavily on herbicides, which can eventually lead to HR weeds (Figure 2). Hence, to avoid or delay the development of resistant weeds, a diverse, and integrated program of weed management practices is required [31]. The biological control includes crop rotation, cover crops (including those with allelopathic activity), intercropping, mulches, water management, manipulation of crop planting dates, seeding rates, cultivar choices, fertilization, row spacing, and tillage, among others [7,29,31].
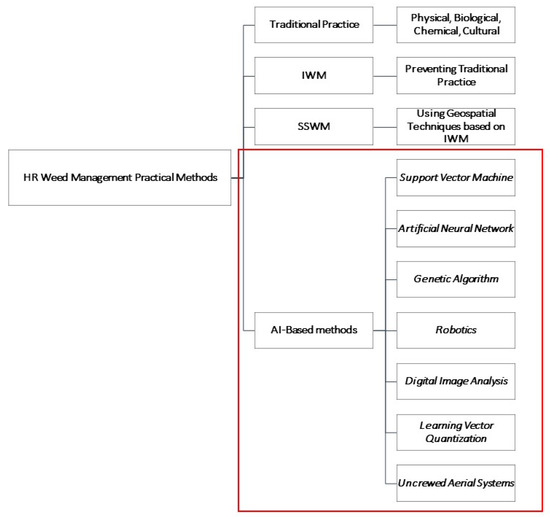
Figure 2.
Summary of HR weed management strategies and practical methods.
2.2.2. Integrated Weed Management (IWM) and Site-Specific Weed Management (SSWM)
Integrated weed management (IWM) is a component of integrated pest management (IPM) that was formulated to promote the combined use of non-chemical and chemical methods to control a pest with more targeted, site-specific, and rational applications [32,33]. The IWM practices involve prevention practices and synergistic use of cultural, mechanical, biological, genetic, and chemical weed control methods to reduce reliance on herbicides and use less-prone herbicides or those with less impact on the environment and health [29,34].
The increased cost and risk, reduced efficacy, and dependency on weather conditions are some of the important factors affecting the adoption of non-chemical methods of weed control by farmers [34]. This indicates that chemical control is indispensable in commercial fields. However, site-specific management of weeds based on IWM can be another effective strategy for weed management and minimizing HR in weeds. Site-specific aims to estimate the spatial and temporal variability within fields and management inputs using geospatial techniques and sensing analytics (such as GIS, GPS, and remote sensing) to achieve optimum profitability, sustainability, and environmental protection [35,36].
In commercial fields, site-specific HR weed management at the landscape level or farm scale can lead to reduced time and effort. In addition, there is a potential for reduced cost of production and enhanced economic and environmental benefits [37] Studies have shown that there are multiple ways for site-specific management of weeds to achieve these benefits. Intermittent herbicide application, in which the herbicide is applied only in areas with prominent weed problems, has been shown to reduce herbicide use by up to 97% [38,39]. Monteiro and Santos (2022) summarized the most common site-specific weed control strategies from different perspectives [40] and other scientists focused on the precision technologies and essential parts of the spot sprayers to save herbicides while managing weeds without losing yields [41].
2.3. Challenges and Opportunities of Managing Herbicide Resistance Weed
2.3.1. Challenges of HR Weed Management
- i.
- Low adoption of resistance-avoidance tactics
The cost and effort of preventing/delaying resistance to many herbicides are widely perceived or estimated to be the same as that of managing HR weeds, and therefore, farmers often do not change their weed management program until resistance has occurred [31]. The inability of farmers to assess the economic risks associated with HR weeds, farmers interested in optimizing short-term income, lack of herbicide groups to control target weeds, and lack of knowledge on the impact of management practices are some of the challenges faced while adopting herbicide resistance tectics (Figure 3). Further, the convenience of applying chemical herbicide compared to increased complexity, costs, and management time associated with non-chemical or IWM practice demotivate the farmers in the implementation of IWM [34,42].
Figure 3.
Challenges and opportunities of managing herbicide resistance weeds.
- ii.
- Lack of herbicides with new mode of action
There is a reduced market for new herbicides and not enough research to support the potential of herbicides with alternate modes of action or target sites. Glyphosate-resistant (GR) crops made it worse since they could only be used with glyphosate herbicide and ultimately leading to GR weeds [27]. Moreover, consolidation of the pesticide discovery industry over the past several decades resulted in attrition in the number and diversity of scientists engaged in this type of research. Meanwhile, the cost of getting a new market has risen and is less effective on predominant GR crops.
- iii.
- Lack of field-specific decision support system (DSS) for weed management
Decision support models for weed management are categorized as efficacy-based and population-based. In the efficacy-based category, usage of herbicides is predicted by the large datasets with herbicide performance on the different types of weeds and crops, while the population-based category focuses on yield loss and soil characteristic changes. Most of the developed weed management decision support systems have severe limitations to the spatial variation of weed population [43,44,45]. DSS can significantly impact improving weed management strategies and strong communication between researcher, producers, and farmers as agricultural decision-makers [46]. Although weed management decision support systems are designed to simulate the stocks and flows between agricultural systems, they need to be controlled in order to collect the required data to run the models; farmers have more tendency toward the usage of low-cost herbicides [47,48]. To make a more effective model for DSS, integrated site-specific information about weeds, the interaction of weed and crop, effect on crop yield and quality are necessary data to collect, but the decision and definition of minimum data are complicated for each scale of management zone and individual farm [49].
2.3.2. Opportunities for HR Weed Management
- i.
- Approach to herbicide discovery
Experiments are going on to explore the mode of action of old herbicides that were not studied before and to explore new molecular target sites to determine their potential for herbicides. Recently, the omics approach has been going on, such as transcriptomics, proteomics, and phenomics, among others, as a powerful tool with powerful analytical capabilities for the quantitative analysis of hundreds of metabolites in plant extracts [27].
- ii.
- HR crops
HR crops can be seen both as a challenge to HR weeds and an opportunity to fight with HR weeds. With proper management that may include diverse crop rotation sequences with multiple HR and non-HR crops, HR crops can reduce herbicide use intensity and help reduce selection pressure on weed populations [50].
- iii.
- Address barriers to IWM
Better recognition of the reasons why farmers are reluctant to use non-chemical methods of weed control at the farm level and devising field-specific strategies, encouraging farmers to adopt a longer-term approach to weed control strategies by research and demonstration, changing farmer attitude by providing incentives on IWM practices, change in the mindset of government and funding agencies [33,34].
- iv.
- Advanced tools and technology: AI, remote sensing
Detecting and diagnosing HR weeds are the initial step in resistance management and monitoring their nature, distribution, and abundance. While there are abundant methods for the initial characterization of herbicide resistance in a weed biotype in the laboratory setting [51], effective weed management in a commercial environment requires time-effective and efficient weed detection and management methods [52]. Advancements in sensor technologies have improved the accuracy of weed detection and classification, leading to adaptive algorithms for a mechanical response. Moreover, integrating artificial intelligence programming and neural networks for real-time image processing can aid decision-making by systematically notifying plant and soil properties based on optical properties, shape, and textural characteristics [53].
- Remote Sensing with UAVs and satellites provides the opportunity to increase field scouting in a timely, efficient manner [54] but is not available for commercial agriculture due to its limited coverage and legal and regulatory issues. Detecting hotspots, maps created from remote sensing or piling, or both allow site-specific weed management of only the areas requiring corrective actions [54]. Remote sensing can provide accurate, site-specific data that can be converted into information used by decision support systems. Studies have shown that vegetation indices based on spectral reflectance captured by remote sensors can help determine herbicides’ efficacy and identify HR weeds. This information can help farmers in the selection and application timing of selected herbicides [52]. Martin et al. (2019) [55] investigated the impact of the height and speed of UAVs as well as different types of nozzles on spot sprayer uniformity and evaluated the effectiveness of the system economically [56].
- Robotics could integrate mechanical, cultural, and herbicidal tactics for timely weed management and at the same time, increase time, labor, and cost efficiency, flame weeding, radio wave, microwave energy, use of animals, AI for real-time image processing and decision making. Zhang et al., 2022 provided an overview of current robotic approaches, key technologies, current limitations, and potential research ideas for the future to manage weeds [57].
3. Overview of Machine Learning and Artificial Intelligence Applied for HR Weed Management
There are a few commercially available AI-based tools and technologies for controlling weed, as machine learning makes the classification process significantly easy [58,59]. Robocrop [60], Remoweed [61], Robovotor [62]. The techniques have been used to classify weed vs. crop [15] and almost 97% accuracy is reported by the scientists [63]. A deep learning technique was applied for object classification to distinguish weeds and crops [64]. As the main goal is to remove the HR weeds, it is necessary to develop reliable weed removal technologies to remove weeds automatically. A lack of an automated and robust weed classification technique was one of the main barriers to developing a fully automated robotic weeder. The Autonomous Weeder uses carbon dioxide lasers to annihilate 100,000 weeds per hour [65]. Scientists work on electrocution as the future of weed management against weeds resistant to herbicides [66]. Therefore, the modification of current available AI-based detection systems by adding the weed removal part (such as mechanical arms, laser, or electrocution) will overcome the HR weed management.
Machine learning approaches are based on sufficiently annotated data to train supervised methods by testing on the unsupervised dataset. The process of data collection and annotation can be time-consuming and may require technical and computing skillset, which limits the applicability of machine learning methods in real-world scenarios. To alleviate this problem, few-shot learning (FSL) has recently gained attention as a potential solution to reduce the amount of annotated data required to train effective models [67]. The FSL methods are generally categorized into (i) data augmentation, (ii) transfer learning, and (iii) meta-learning. Data augmentation techniques include various strategies to artificially generate new training samples to increase the amount of annotated data. Transfer learning-based approaches involve pretraining a model on a larger source dataset before pursuing training on a small target dataset. Finally, meta-learning, or learning-to-learn approaches, aim to develop models that can quickly be specialized on new tasks with little data.
A large variety of crops and weeds makes it very challenging, if not impossible, to develop a universal vision system that could work on all farms. Having machine learning models that can quickly be trained on a few examples of a new environment could facilitate the deployment of robotic systems at a larger scale. For weed management, FSL can play an essential role in developing vision systems for robotic solutions of selective weed spraying or removal by addressing the following challenges.
- Cost: if the acquisition and annotation of large enough datasets is an obstacle in developing new technologies for weed identification, FSL can limit the cost and time of this process by reducing the amount of required data [68,69];
- Skills: the annotation of specific weed images can also require experts, as well as deploying machine learning technologies. On the contrary, FSL can facilitate annotators’ work since fewer images per class are needed to be labeled. Models that can easily learn new classes can also participate in the democratization of machine learning technologies by simplifying the optimization procedure, which otherwise can require robust computation architectures (e.g., GPUs) and complex hyperparameter searches. [70,71].
- I.
- Transfer learning
Transfer learning is a common practice in computer vision with deep learning. Knowledge acquired from training on a source dataset takes the form of optimized weights in neural networks and can be reused while learning novel tasks. Weights of popular models, pretrained on large public datasets such as ImageNet [72], or COCO [73], are generally used in deep learning libraries. These datasets contain color spaces in the visible range (red-green-blue images) of natural scenes and common objects, which allow learning generic features that can be transferred to other tasks, including weed identification. For instance, [74] proposed two strategies to transfer features learned from ImageNet to the task of weed/crop classification. The first strategy was to reuse a deep convolutional network pre-trained on ImageNet and fine-tune the last layer on the target dataset. The second was to use the pre-trained network as a feature extractor and use the features to train other machine learning models such as gradient boosting, support vector machine, logistic regression, or random forests. In this study, pretraining on an agriculture dataset was aimed to improve weed identification more than pretraining on ImageNet, as the former is from a closer source domain to the target task [75]. Although both transfer learning strategies performed very well, pre-trained deep learning models on agriculture datasets were more robust to noise, converged faster, and obtained slightly better results.
Similarly, transfer learning for weed and crop segmentation has been studied by [70]. Pretraining was done on a given crop dataset, and then fine-tuning was performed on either fully labeled or partially labeled data of another crop. The results showed that training time could be reduced by up to 80% when transfer learning was performed as compared to a CNN trained from scratch [70].
- II.
- Data augmentation
The solution to the problem of small datasets for training the AI-based models is to enlarge the training dataset with data augmentation artificially. Geometrical transformations are often used as a low-cost preprocessing strategy to generate multiple variations of training images [76]. These can include operations such as flipping, cropping, rescaling, translation, rotation, etc. Alternatively, semantic segmentation of weeds, [77] proposes to randomly paste a few weed leaves in background images to generate synthetic training data of weeds in various conditions. Image patches can be sampled from multiple images and combined to generate additional training data [78]. However, the samples generated from geometrical transformations maintain correlations with the original data and can thus be limited. Generative models such as generative adversarial networks have been employed to produce realistic images of weeds and crops [71,79,80].
- III.
- Meta-learning
Meta-learning aims to solve the problem by adopting the N-way K-shot mechanism, which aims to learn N new classes from K examples where K is small, e.g., 1, 5, or 10. Meta-learning approaches can further be divided into meta-optimization and metric learning [67]. A typical approach of meta-optimization aims to train models that can learn new classes in a few optimization steps, thus requiring less training data [81]. This strategy has been employed to learn to estimate weed density from UAV multispectral images with only a few iterations [82].
Metric learning approaches the task of data identification from a different perspective in which models are trained to project input data into an embedding space where similar data are close and dissimilar data are farther (according to a predefined distance metric such as “Euclidean distance”) [83]. Learning a mapping from input data to a learned embedding space allows one to classify previously unseen data with only a few examples based on distances. For instance, a popular approach is a prototypical network [68] which uses fewer examples (e.g., 5 images) for each class and then projects in the embedding space, averaged to serve as class prototypes. Unlabeled images are then classified based on the nearest class prototype. The application of prototypical networks to agriculture datasets and establishing baselines for few-shot classification of plant leaves classification are primarily based on metric learning [69].
Contrastive learning, a form of metric learning, has also been employed to learn classification and segmentation with unlabeled data [84]. Their method obtained significantly higher accuracy when leveraging contrastive learning in a semi-supervised setting with fewer annotated data.
4. Weed Mapping and Classification
Weed mapping and classification are referred to represents synergies of spatial information for weed identification. The identification part is divided into data acquisition, crop classification, and results visualization. The efficient combination of systems and sensors, several machine learning techniques, and spectral indices can be successfully applied to identify the weeds and the herbicide resistance ones.
4.1. Reflectance Properties in Spatial and Spectral Weed Detection and Localization
The revolutionized application of Uncrewed Aerial Vehicles (UAVs) technology in input management for crop production has significantly impacted the productivity of large farm acres. UAVs are widely used for identifying weed patches in the field. The acquired drone imagery is then processed using machine learning techniques. Other aerial reflectance-based (e.g., satellite) imagery is deployed for early weed patch monitoring [85]. UAVs are useful for detecting weeds at an ultra-high resolution based on the camera and spectral band. On the contrary, satellite imagery can range from 30 m to a kilometer range.
The spectral bands UAVs on or satellites are acquired using spectral sensors/cameras. Therefore, it is important to identify the right subset of bands that can distinguish the appropriate patch sizes based on the scale and resolution [86]. Many narrow and contiguous spectral bands are used to distinguish weeds from other vegetation based on the properties of pigment compositions of plants (Table 1) [87,88,89]. Researchers have determined several techniques to detect and localize weeds based on (i) spectral signatures to develop imaging spectrographs [90,91], (ii) morphological properties like leaf shape and geometric features [92], (iii) modelized leaf shapes based on high-resolution imagery [93], (iv) aerial imagery using cameras with optical bandpass filters to differentiate weeds and crops [94].

Table 1.
The absorption spectrum of common plant compounds useful for differentiating crops and weeds with crops using spectral signatures.
The reflectance properties of aerial imagery in the visible range of 400 to 700 nm are well established to reflect and absorb specific wavelengths in red (R), green (G), and blue (B) spectra as primary color space [95]. The reflectance is low in this region, with a peak at approximately 550 to 560 nm that reflects the green spectra, indicating the maximum sensitivity for chlorophyll in this region [96,97]. Determining chlorophyll content is useful in correlating with crop stages and types, to distinguish weed patches from crops. The transition to near-infrared (NIR) regions has been the subject of several studies [90,98,99,100,101,102]. The NIR band lies in the 800–1350 nm spectral range and exhibits a plateau [97]. Under field conditions, the NIR plateau exhibited light readily and was followed by a region of low reflectance to major moisture absorption bands (1450–1950 nm) [97,103]. Multispectral imagery expresses the spectral responses in terms of red, green, blue, red edge, and infra-red wavelength and is commonly used for photogrammetric analysis of spatial features [104]. However, imaging spectroscopy or hyperspectral imaging expresses the full spectral range for each pixel of the image and also expresses the three-dimensional structure [105,106]. Due to light hardware and faster calculation speed, multispectral imagery is widely gaining advantages over hyperspectral imagery for weed detection and localization.
Though AI-based methods are effective, robust, and reliable in understanding environmental conditions and plant characteristics, operational durability and limited payloads on some AI-Based systems like UAVs may constrain the treatment applicability at a larger scale. e.g., broad spatial coverage by uncrewed aerial systems (UAS) is not achievable due to short battery life and flight duration, and data processing cost increases exponentially as the volume of data increases with larger areas [107,108]. Apart from the financial cost, AI-based methods require understanding, investment in new skills and equipment, and sharing data with technology suppliers. Moreover, the adoption of new technologies by landowners is ambiguous since the decision is dependent on (1) the farmer’s perception and behavioral preferences, such as environmental consciousness about the utilization of technology; (2) pressure from peers, and the presence of complementary technology; (3) risk and reward assessment; and (4) policies rewarding farmers for the adoption of technologies or tax them for negatively generated externalities [109].
4.2. Thermal Imaging for Susceptible vs. Resistance Weed Canopies
Before the interactive effect of herbicides through a proper mode of action, weed resistance and susceptibility is a complex and challenging task to visually scout the distinctive phenology. This delays the management and significantly impacts the yield. Therefore, several techniques are being evaluated in combination with the spectral reflectance of weed patches. Several researchers have identified thermal imaging as one of the potential techniques for detecting increased levels of stress and reduced rates of photosynthesis in plants [110]. In production agriculture, glyphosate is one of the commonly used herbicides and is widely researched for resistance studies [111]. The chemical composition of glyphosate induces stress in plants and this stress is distinct for susceptible vs resistant weed species. The inhibition of stomatal conductance leads to a reduced rate of photosynthesis after glyphosate addition, as it lowers the ability of the leaf to transpire and increases the surface temperature [112]. This physiological phenomenon indicates that the addition of glyphosate leads to significantly higher temperatures for susceptible canopies than the resistant ones [110,112,113]. Therefore, a thermal camera mounted on UAV can be useful for detecting susceptible vs resistance patches on a spatial scale in large fields. This approach has been experimented on, and has been proven to be successful for common weeds like kochia, water hemp, palmer amaranth pigweed, and ragweed [27,28,110,114].
4.3. Spectral Measurements and Indices-Based Weed Detection
Spectral bands have extensively allowed for rapid, in situ, and non-destructive measurements of crop phenological properties like crop water stress [115,116], leaf area [117], nitrogen content [118], chlorophyll content [96,119], photosynthesis [120], vegetation indices [116], disease detection [121] and crop maturity and senescence [122]. The discrepancies or distinctive spectral signatures of weeds are an important factor for detecting herbicide resistance weeds [113,123,124]. Spectral weed indices have been used for kochia (Kochia scoparia), ragweed (Ambrosia artemisiifolia L.), and hemp (Amaranthus rudis) by combining a single wavelength and a normalized wavelength (450–920 nm) to identify herbicide (example glyphosate) resistance for weeds with a higher degree of resistance and optimization using machine learning techniques [124]. Several researchers have developed these weed indices and Table 2 identifies these spectral indices used by researchers for specific weeds.
Table 2.
Spectral weed indices formula.
Table 2.
Spectral weed indices formula.
| Index Name | Formula | Experimental Weed Population |
|---|---|---|
| Weed Spectral Resistance Index (WSRI) | Barnyard grass, Velvet leaf [125] | |
| Spectral Weed Indices (SWI) | A, C, D are wavelengths chosen from the pool of eight selected wavelengths (A ≠ C ≠ D) and b is the weighting factor | Kochia AB = R460 nm; C = R520 nm; D = R760 nm Ragweed AB = R670 nm; C = R790 nm; D = R760 nm Water hemp AB = R760 nm; C = R490 nm; D = R790 nm [124] |
| Red Edge Position (REP) | c1 and c2, intercepts and m1 and m2 represent the slopes of the far-red and near infra-red line | Grass species-Brachypodium genuense, Briza media, Bromus erectus and Festuca sp. Herb species–Anthemis carpatica, Cirsium creticum, Crepis pygmaea, Lamium garganicum, Onobrychis viciifolia, Tanacetum parthenium and Trifolium pretense [126] |
| Ratio Vegetation Index (RVI) | R677 is wavelength at 677 nm and R710 is wavelength at 710 nm | Foxtail, Goosegrass, Round and lobed leaf pharbitis redroot amaranth, purslane, lambs quarters [127] |
| Crofton Weed Index (CWI) | Crofton weed (Eupatorium adenophorum spreng) [128] | |
| Normalized Crop sample Index (NCSI) | λ(i,j) = cell in the dataset representing sample i in spectral band j. λnormVecj = spectral reflectance of band j in the vector of a selected labeled rectangle from the crop population | Weeds of the genus Convoluaceae in Watermelon [129] |
4.4. Integrating Reflectance Properties with Machine Learning Techniques
Agriculture applications are extremely effective and straightforward due to machine learning. There are three stages of the machine learning process: data collecting, model development, and generalization [125]. In most cases, machine learning algorithms are implemented to overcome complicated issues such as weed detection, classification, herbicide management, and the detection of resistant weeds when human expertise is insufficient. Machine learning is based on supervised, semi-supervised and unsupervised learning. It explores a large amount of known data sets that assist with predicting unknown variables or future event. The two strategies against weed resistance include the repetitive and rotational uses of herbicides based on the modes of action, and new discoveries of phytotoxic molecules [130]. The molecular features of herbicide resistance combined with the predictive models of phytotoxic properties are integrated to develop a comprehensive machine learning-based exploration of herbicide chemistry [130,131] Here are several machine learning examples, along with their application, working principles, and special features (Table 3).
Table 3.
Working principles of machine learning techniques for weed identification for non-chemical-based management.
Table 3.
Working principles of machine learning techniques for weed identification for non-chemical-based management.
| Machine Learning Technique | Application | Working Principle | Special Features | References |
|---|---|---|---|---|
| Convolutional Neural Networks (CNN) | The deeper CNN is used to classify weeds and crops, whereas the shallow network is used to detect weeds. | Machine learning algorithm with convolutional layers to test the weed features using images taken by UAVs (such as the leaf shape and position) | Propose a low-cost weed Identification system to build the identification model with an accuracy of 92% | [132] |
| Deep convolutional neural network (DCNN) | High-throughput phenotyping and accurate field management of resistant weeds | Spectral characteristics of susceptible weeds are different from resistant weeds after herbicide application | Capable of autonomously learning fundamental filters and combining them hierarchically | [125] |
| Support vector machine (SVM) | Identification of weeds, predict herbicide resistance in weeds, determine the appropriate herbicide | Two-dimensional spatial map with an additional dimension of spectral information, allowing to collect (NDVI) | Reduce the influence of the unknown variability and effective in small-sample handling with an accuracy of 97% | [133] |
| Artificial neural networks (ANNs) | Classify the weed species based on the color, texture, and leaf of weeds | Collect the spectral data in vegetation indices, canopy cover, and plant density by using remote sensors | ANN detects the weeds with an accuracy of up to 95% | [134] |
| Random forest (RF) classifier | Real-time detection of the weed and crop for precision UAV spraying | UAV images are used in the combination of digital surface models (DSMs), then separate the weeds from the crops | A popular option for its generalized performance and operational speed with an accuracy of 96% | [135] |
| k-nearest neighbors (KNN) | Evaluating crop damage from herbicides, Weed classification for real-time automatic sprayer | Based on the spectral data between crops and weeds | Classification and regression issues are addressed with an accuracy of 93%. | [136] |
| ShuffleNet-v2 and VGGNet | Detecting and discriminating weeds susceptible to herbicide | Trained according to the herbicide weed control spectrum with the goal of autonomous spot-spraying herbicides. | High overall accuracy (≥0.999) | [137] |
5. Conclusions
Weed management is necessary for agriculture productivity. Integrated management strategies allow us to manage weeds with limited or no chemicals. It is necessary not only to deal with general challenges in weed management but also to cope with a low adoption of resistance-avoidance tactics and the lack of field-specific decision support systems. Therefore, applying AI-based methods has been reported as an efficient technique to manage weeds by using agrochemicals in optimized ways and hopefully eliminate them in the future. This paper makes the first comprehensive review of AI-based methods and tools; applications, and challenges to manage herbicide-resistant weeds. These methodologies can be extended, creating more opportunities and guidance for future academic endeavors.
Author Contributions
Conceptualization, methodology, investigation, writing—review and editing, supervision, S.G.; conceptualization, methodology, investigation, writing—original draft preparation, G.J.; investigation, writing—original draft preparation, W.D.; investigation, writing—original draft preparation, F.M.; investigation, writing—original draft preparation, writing, F.N.; investigation, writing—original draft preparation, S.B.; investigation, writing—original draft preparation, U.D.; investigation, writing—original draft preparation, M.F.; investigation, writing—original draft preparation, J.N. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Délye, C.; Jasieniuk, M.; le Corre, V. Deciphering the evolution of herbicide resistance in weeds. Trends Genet. 2013, 29, 649–658. [Google Scholar] [CrossRef]
- Eli-Chukwu, N.C. Applications of Artificial Intelligence in Agriculture: A Review. Eng. Technol. Appl. Sci. Res. 2019, 9, 4377–4383. [Google Scholar] [CrossRef]
- Kumar, V.; Jha, P.; Jugulam, M.; Yadav, R.; Stahlman, P.W. Herbicide-Resistant Kochia (Bassia scoparia) in North America: A Review. Weed Sci. 2019, 67, 4–15. [Google Scholar] [CrossRef]
- Slaughter, D.C.; Giles, D.K.; Fennimore, S.A.; Smith, R.F. Multispectral Machine Vision Identification of Lettuce and Weed Seedlings for Automated Weed Control. Weed Technol. 2008, 22, 378–384. [Google Scholar] [CrossRef]
- Young, S.L.; Pierce, F.J.; Nowak, P. Automation: The Future of Weed Control in Cropping Systems. West Central Research, Extension and Education Center: North Platte, Nebraska, 2014. Available online: https://digitalcommons.unl.edu/westcentresext/80/ (accessed on 21 November 2013).
- Partel, V.; Kakarla, S.C.; Ampatzidis, Y. Development and evaluation of a low-cost and smart technology for precision weed management utilizing artificial intelligence. Comput. Electron. Agric. 2019, 157, 339–350. [Google Scholar] [CrossRef]
- Norsworthy, J.K.; Ward, S.M.; Shaw, D.R.; Llewellyn, R.S.; Nichols, R.L.; Webster, T.M.; Bradley, K.W.; Frisvold, G.; Powles, S.B.; Burgos, N.R.; et al. Reducing the Risks of Herbicide Resistance: Best Management Practices and Recommendations. Weed Sci. 2012, 60, 31–62. [Google Scholar] [CrossRef]
- Robinson, A. Herbicide Injury in Potatoes; North Dakota State University: Fargo, ND, USA, 2020. [Google Scholar]
- Peters, T.J.; Metzger, M.S.; Regitnig, P.J. Herbicide Mode of Action and Sugar Beet Injury Symptoms; North Dakota State University Extension: Fargo, ND, USA, 2018. [Google Scholar]
- Cavanugh, K.J.; Drugan, B.R.; Zollinger, R.K.; Selberg, W.A. Herbicide and Nonherbicide Injury Symptoms on Spring Wheat and Barley; University of Minnesota Extension Service: St. Paul, MN, USA, 1998. [Google Scholar]
- Roslim, M.H.M.; Juraimi, A.S.; Che’Ya, N.N.; Sulaiman, N.; Manaf, M.N.H.A.; Ramli, Z.; Motmainna, M. Using Remote Sensing and an Unmanned Aerial System for Weed Management in Agricultural Crops: A Review. Agronomy 2021, 11, 1809. [Google Scholar] [CrossRef]
- Gerhards, R.; Sanchez, D.A.; Hamouz, P.; Peteinatos, G.G.; Christensen, S.; Fernandez-Quintanilla, C. Advances in site-specific weed management in agriculture—A review. Weed Res. 2022, 62, 123–133. [Google Scholar] [CrossRef]
- de Castro, A.I.; Jurado-Expósito, M.; Peña-Barragán, J.M.; López-Granados, F. Airborne multi-spectral imagery for mapping cruciferous weeds in cereal and legume crops. Precis. Agric. 2012, 13, 302–321. [Google Scholar] [CrossRef]
- Rajaa, R.; Slaughtera, D.C.; Fennimoreb, S.; Siemensc, M. Precision weed control robot for vegetable fields with high crop and weed densities. In Proceedings of the 2019 ASABE Annual International Meeting, Boston, MA, USA, 7–10 July 2019. [Google Scholar] [CrossRef]
- Potena, C.; Nardi, D.; Pretto, A. Fast and Accurate Crop and Weed Identification with Summarized Train Sets for Precision Agriculture. In Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2017; pp. 105–121. [Google Scholar] [CrossRef]
- Sarvini, T.; Sneha, T.; Gowthami, G.S.S.; Sushmitha, S.; Kumaraswamy, R. Performance Comparison of Weed Detection Algorithms. In Proceedings of the 2019 International Conference on Communication and Signal Processing (ICCSP), Chennai, India, 4–6 April 2019; pp. 843–847. [Google Scholar] [CrossRef]
- Reddy, K.N.; Huang, Y.; A Lee, M.; Nandula, V.K.; Fletcher, R.S.; Thomson, S.J.; Zhao, F. Glyphosate-resistant and glyphosate-susceptible Palmer amaranth (Amaranthus palmeri S. Wats.): Hyperspectral reflectance properties of plants and potential for classification. Pest Manag. Sci. 2014, 70, 1910–1917. [Google Scholar] [CrossRef]
- Nugent, P.W.; Shaw, J.A.; Jha, P.; Scherrer, B.; Donelick, A.; Kumar, V. Discrimination of herbicide-resistant kochia with hyperspectral imaging. J. Appl. Remote Sens. 2018, 12, 1. [Google Scholar] [CrossRef]
- Beeharry, Y.; Bassoo, V. Drone-Based Weed Detection Architectures Using Deep Learning Algorithms and Real-Time Analytics. In Computer Vision and Machine Learning in Agriculture; Springer: Singapore, 2022; pp. 15–33. [Google Scholar] [CrossRef]
- Hung, C.; Sukkarieh, S. Robotic aircraft and intelligent surveillance systems for weed detection. In Proceedings of the 12th Queensland Weed Symposium, Hervey Bay, QLD, Australia, 15–18 July 2013; pp. 64–67. [Google Scholar]
- Lambert, J.P.; Childs, D.Z.; Freckleton, R.P. Testing the ability of unmanned aerial systems and machine learning to map weeds at subfield scales: A test with the weed Alopecurus myosuroides (Huds). Pest Manag. Sci. 2019, 75, 2283–2294. [Google Scholar] [CrossRef]
- Raja, R.; Slaughter, D.C.; Fennimore, S.A.; Nguyen, T.T.; Vuong, V.L.; Sinha, N.; Tourte, L.; Smith, R.F.; Siemens, M.C. Crop signalling: A novel crop recognition technique for robotic weed control. Biosyst. Eng. 2019, 187, 278–291. [Google Scholar] [CrossRef]
- Aitkenhead, M.J.; Dalgetty, I.A.; Mullins, C.E.; McDonald, A.J.S.; Strachan, N.J.C. Weed and crop discrimination using image analysis and artificial intelligence methods. Comput. Electron. Agric. 2003, 39, 157–171. [Google Scholar] [CrossRef]
- Amend, S.; Brandt, D.; Di Marco, D.; Dipper, T.; Gässler, G.; Höferlin, M.; Gohlke, M.; Kesenheimer, K.; Lindner, P.; Leidenfrost, R.; et al. Weed Management of the Future. KI—Künstliche Intell. 2019, 33, 411–415. [Google Scholar] [CrossRef]
- Su, W.-H. Crop plant signaling for real-time plant identification in smart farm: A systematic review and new concept in artificial intelligence for automated weed control. Artif. Intell. Agric. 2020, 4, 262–271. [Google Scholar] [CrossRef]
- Reddy, K.N.; Jha, P. Herbicide-resistant weeds: Management strategies and upcoming technologies. Indian J. Weed Sci. 2016, 48, 108. [Google Scholar] [CrossRef]
- Duke, S.O. Why have no new herbicide modes of action appeared in recent years? Pest Manag. Sci. 2012, 68, 505–512. [Google Scholar] [CrossRef]
- Beckie, H.J.; Reboud, X. Selecting for Weed Resistance: Herbicide Rotation and Mixture. Weed Technol. 2009, 23, 363–370. [Google Scholar] [CrossRef]
- Vencill, W.K.; Nichols, R.L.; Webster, T.M.; Soteres, J.K.; Mallory-Smith, C.; Burgos, N.R.; Johnson, W.G.; McClelland, M.R. Herbicide Resistance: Toward an Understanding of Resistance Development and the Impact of Herbicide-Resistant Crops. Weed Sci. 2012, 60, 2–30. [Google Scholar] [CrossRef]
- Heap, I. The International Herbicide-Resistant Weed Database. Available online: www.weedscience.org (accessed on 26 May 2022).
- Beckie, H.J. Herbicide-Resistant Weeds: Management Tactics and Practices. Weed Technol. 2006, 20, 793–814. [Google Scholar] [CrossRef]
- Ehler, L.E. Integrated pest management (IPM): Definition, historical development and implementation, and the other IPM. Pest Manag. Sci. 2006, 62, 787–789. [Google Scholar] [CrossRef]
- Owen, M.D.K. Diverse Approaches to Herbicide-Resistant Weed Management. Weed Sci. 2016, 64, 570–584. [Google Scholar] [CrossRef]
- Moss, S. Integrated weed management (IWM): Why are farmers reluctant to adopt non-chemical alternatives to herbicides? Pest Manag. Sci. 2019, 75, 1205–1211. [Google Scholar] [CrossRef] [PubMed]
- Oliver, M.; Bishop, T.; Marchant, B. (Eds.) Precision Agriculture for Sustainability and Environmental Protection; Routledge: London, UK, 2013. [Google Scholar] [CrossRef]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Shaw, D.R. Translation of remote sensing data into weed management decisions. Weed Sci. 2005, 53, 264–273. [Google Scholar] [CrossRef]
- Rew, L.J.; Cussans, G.W.; Mugglestone, M.A.; Miller, P.C.H. A technique for mapping the spatial distribution of Elymus repots, with estimates of the potential reduction in herbicide usage from patch spraying. Weed Res. 1996, 36, 283–292. [Google Scholar] [CrossRef]
- Wilkerson, G.G.; Price, A.J.; Bennett, A.C.; Krueger, D.W.; Roberson, G.T.; Robinson, B.L. Evaluating the Potential for Site-Specific Herbicide Application in Soybean. Weed Technol. 2004, 18, 1101–1110. [Google Scholar] [CrossRef]
- Monteiro, A.; Santos, S. Sustainable Approach to Weed Management: The Role of Precision Weed Management. Agronomy 2022, 12, 118. [Google Scholar] [CrossRef]
- Allmendinger, A.; Spaeth, M.; Saile, M.; Peteinatos, G.G.; Gerhards, R. Precision Chemical Weed Management Strategies: A Review and a Design of a New CNN-Based Modular Spot Sprayer. Agronomy 2022, 12, 1620. [Google Scholar] [CrossRef]
- Jussaume, R.A.; Ervin, D. Understanding Weed Resistance as a Wicked Problem to Improve Weed Management Decisions. Weed Sci. 2016, 64, 559–569. [Google Scholar] [CrossRef]
- Neeser, C.; Dille, J.A.; Krishnan, G.; Mortensen, D.A.; Rawlinson, J.T.; Martin, A.R.; Bills, L.B. WeedSOFT®: A weed management decision support system. Weed Sci. 2004, 52, 115–122. [Google Scholar] [CrossRef]
- Parsons, D.J.; Benjamin, L.R.; Clarke, J.; Ginsburg, D.; Mayes, A.E.; Milne, A.; Wilkinson, D.J. Weed Manager—A model-based decision support system for weed management in arable crops. Comput. Electron. Agric. 2009, 65, 155–167. [Google Scholar] [CrossRef]
- Rydahl, P.; Berit, A.; Munier-Jolain, N. 24-Decision Support Systems (DSS) For Weed Control in Europe–State-of-the-Art and Identification of ‘Best ’Parts’ For Unification on a European Level. 2008, Diversifying Crop Protection, La Grande-Motte, France, 12–15 October 2008. Available online: http://www.endure-network.eu/international_conference_2008/proceedings/tuesday_october_14 (accessed on 9 November 2022).
- Montull, J.M.; Soenderskov, M.; Rydahl, P.; Boejer, O.M.; Taberner, A. Four years validation of decision support optimising herbicide dose in cereals under Spanish conditions. Crop. Prot. 2014, 64, 110–114. [Google Scholar] [CrossRef]
- Rossi, V.; Salinari, F.; Poni, S.; Caffi, T.; Bettati, T. Addressing the implementation problem in agricultural decision support systems: The example of vite.net®. Comput. Electron. Agric. 2014, 100, 88–99. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; López-Granados, F.; de Castro, A.I.; Peña-Barragán, J.M. Configuration and Specifications of an Unmanned Aerial Vehicle (UAV) for Early Site Specific Weed Management. PLoS ONE 2013, 8, e58210. [Google Scholar] [CrossRef]
- Yost, M.A.; Sudduth, K.A.; Walthall, C.L.; Kitchen, N.R. Public–private collaboration toward research, education and innovation opportunities in precision agriculture. Precis. Agric. 2019, 20, 4–18. [Google Scholar] [CrossRef]
- Brunharo, C.A.C.G.; Gast, R.; Kumar, V.; Mallory-Smith, C.A.; Tidemann, B.D.; Beckie, H.J. Western United States and Canada perspective: Are herbicide-resistant crops the solution to herbicide-resistant weeds? Weed Sci. 2022, 70, 272–286. [Google Scholar] [CrossRef]
- Beckie, H.; Heap, I.; Smeda, R.; Hall, L. Screening for Herbicide Resistance in Weeds. Weed Technol. 2000, 14, 428–445. [Google Scholar] [CrossRef]
- Travlos, I.; Tsekoura, A.; Antonopoulos, N.; Kanatas, P.; Gazoulis, I. Novel sensor-based method (quick test) for the in-season rapid evaluation of herbicide efficacy under real field conditions in durum wheat. Weed Sci. 2021, 69, 147–160. [Google Scholar] [CrossRef]
- Singh, V.; Rana, A.; Bishop, M.; Filippi, A.M.; Cope, D.; Rajan, N.; Bagavathiannan, M. Unmanned aircraft systems for precision weed detection and management: Prospects and challenges. In Advances in Agronomy; Elsevier: Amsterdam, The Netherlands, 2020; pp. 93–134. [Google Scholar] [CrossRef]
- Molaei, F.; Ghatrehsamani, S.H. Kinematic-Based Multi-Objective Design Optimization of a Grapevine Pruning Robotic Manipulator. AgriEngineering 2022, 4, 606–625. [Google Scholar] [CrossRef]
- Martin, D.E.; Woldt, W.E.; Latheef, M.A. Effect of Application Height and Ground Speed on Spray Pattern and Droplet Spectra from Remotely Piloted Aerial Application Systems. Drones 2019, 3, 83. [Google Scholar] [CrossRef]
- Martin, D.E.; Latheef, M.A.; Lopez, J.D.; Duke, S.E. Aerial Application Methods for Control of Weed Species in Fallow Farmlands in Texas. Agronomy 2020, 10, 1764. [Google Scholar] [CrossRef]
- Zhang, W.; Miao, Z.; Li, N.; He, C.; Sun, T. Review of Current Robotic Approaches for Precision Weed Management. Curr. Robot. Rep. 2022, 3, 139–151. [Google Scholar] [CrossRef]
- Chapelle, O.; Haffner, P.; Vapnik, V.N. Support vector machines for histogram-based image classification. IEEE Trans. Neural. Netw. 1999, 10, 1055–1064. [Google Scholar] [CrossRef]
- Raja, R.; Dutta, A.; Dasgupta, B. Learning framework for inverse kinematics of a highly redundant mobile manipulator. Rob. Auton. Syst. 2019, 120, 103245. [Google Scholar] [CrossRef]
- Tillett, N.D.; Hague, T.; Grundy, A.C.; Dedousis, A.P. Mechanical within-row weed control for transplanted crops using computer vision. Biosyst. Eng. 2008, 99, 171–178. [Google Scholar] [CrossRef]
- Costruzioni Meccaniche Ferrari. Automated Weeders. 2017. Available online: https://ferraricostruzioni.com/en/automated-weeders/83-corpion.html (accessed on 11 October 2022).
- Poulsen, F. Engineering, Robovotor. 2017. Available online: http://www.visionweeding.com/robovator-mechanical/ (accessed on 10 April 2019).
- Zhang, Y.; Slaughter, D.C. Hyperspectral species mapping for automatic weed control in tomato under thermal environmental stress. Comput. Electron. Agric. 2011, 77, 95–104. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]
- Delbert, C. This Badass Robot Uses Lasers to Slay 100,000 Weeds per Hour. 2021. Available online: https://www.popularmechanics.com/technology/robots/a36331690/autonomous-farming-robot-kills-weeds/ (accessed on 10 November 2022).
- Bradley, K. Weed Electrocution Research Sparks Interest as Herbicide Resistance Impedes Current Methods. 2021. Available online: https://extension.missouri.edu/news/weed-electrocution-research-sparks-interest-as-herbicide-resistance-impedes-current-methods-5262 (accessed on 10 November 2022).
- Wang, Y.; Yao, Q.; Kwok, J.T.; Ni, L.M. Generalizing from a Few Examples. ACM Comput. Surv. 2021, 53, 63. [Google Scholar] [CrossRef]
- Snell, J.; Swersky, K.; Zemel, R. Prototypical Networks for Few-shot Learning. Adv. Neural Inf. Process. Syst. 2017, 30. [Google Scholar] [CrossRef]
- Li, Y.; Yang, J. Meta-learning baselines and database for few-shot classification in agriculture. Comput. Electron. Agric. 2021, 182, 106055. [Google Scholar] [CrossRef]
- Bosilj, P.; Aptoula, E.; Duckett, T.; Cielniak, G. Transfer learning between crop types for semantic segmentation of crops versus weeds in precision agriculture. J. Field Robot. 2020, 37, 7–19. [Google Scholar] [CrossRef]
- Fawakherji, M.; Potena, C.; Prevedello, I.; Pretto, A.; Bloisi, D.D.; Nardi, D. Data Augmentation Using GANs for Crop/Weed Segmentation in Precision Farming. In Proceedings of the 2020 IEEE Conference on Control Technology and Applications (CCTA), Montreal, QC, Canada, 24–26 August 2020; pp. 279–284. [Google Scholar] [CrossRef]
- Deng, J.; Dong, W.; Socher, R.; Li, L.-J.; Li, K.; Fei-Fei, L. ImageNet: A large-scale hierarchical image database. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 248–255. [Google Scholar] [CrossRef]
- Lin, T.Y.; Maire, M.; Belongie, S.; Bourdev, L.; Girshick, R.; Hays, J.; Perona, P.; Zitnick, C.L.; Dollár, P. Microsoft COCO: Common Objects in Context. In Proceedings of the 13th European Conference, Zurich, Switzerland, 6–12 September 2014; pp. 740–755. [Google Scholar] [CrossRef]
- Espejo-Garcia, B.; Mylonas, N.; Athanasakos, L.; Fountas, S.; Vasilakoglou, I. Towards weeds identification assistance through transfer learning. Comput. Electron. Agric. 2020, 171, 105306. [Google Scholar] [CrossRef]
- Espejo-Garcia, B.; Mylonas, N.; Athanasakos, L.; Fountas, S. Improving weeds identification with a repository of agricultural pre-trained deep neural networks. Comput. Electron. Agric. 2020, 175, 105593. [Google Scholar] [CrossRef]
- Shorten, C.; Khoshgoftaar, T.M. A survey on Image Data Augmentation for Deep Learning. J. Big Data 2019, 6, 60. [Google Scholar] [CrossRef]
- Guldenring, R.; Boukas, E.; Ravn, O.; Nalpantidis, L. Few-leaf Learning: Weed Segmentation in Grasslands. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 3248–3254. [Google Scholar] [CrossRef]
- Su, D.; Kong, H.; Qiao, Y.; Sukkarieh, S. Data augmentation for deep learning based semantic segmentation and crop-weed classification in agricultural robotics. Comput. Electron. Agric. 2021, 190, 106418. [Google Scholar] [CrossRef]
- Ghatrehsamani, S.H.; Ampatzidis, Y.; Schueller, J.; Ehsani, R. Simulation and Evaluation of Heat Transfer Inside a Diseased Citrus Tree during Heat Treatment. AgriEngineering 2021, 3, 19–28. [Google Scholar] [CrossRef]
- Fawakherji, M.; Potena, C.; Pretto, A.; Bloisi, D.D.; Nardi, D. Multi-Spectral Image Synthesis for Crop/Weed Segmentation in Precision Farming. Rob. Auton. Syst. 2021, 146, 103861. [Google Scholar] [CrossRef]
- Finn, C.; Abbeel, P.; Levine, S. Model-Agnostic Meta-Learning for Fast Adaptation of Deep Networks. In Proceedings of the International Conference on Machine Learning, Sydney, NSW, Australia, 6–11 August 2017; pp. 1126–1135. [Google Scholar]
- Wang, S.; Han, Y.; Chen, J.; He, X.; Zhang, Z.; Liu, X.; Zhang, K. Weed Density Extraction Based on Few-Shot Learning Through UAV Remote Sensing RGB and Multispectral Images in Ecological Irrigation Area. Front. Plant Sci. 2022, 12, 735230. [Google Scholar] [CrossRef]
- Kaya, M.; Bilge, H. Deep Metric Learning: A Survey. Symmetry 2019, 11, 1066. [Google Scholar] [CrossRef]
- Güldenring, R.; Nalpantidis, L. Self-supervised contrastive learning on agricultural images. Comput. Electron. Agric. 2021, 191, 106510. [Google Scholar] [CrossRef]
- Esposito, M.; Crimaldi, M.; Cirillo, V.; Sarghini, F.; Maggio, A. Drone and sensor technology for sustainable weed management: A review. Chem. Biol. Technol. Agric. 2021, 8, 18. [Google Scholar] [CrossRef]
- Farooq, A.; Hu, J.; Jia, X. Analysis of Spectral Bands and Spatial Resolutions for Weed Classification Via Deep Convolutional Neural Network. IEEE Geosci. Remote Sens. Lett. 2019, 16, 183–187. [Google Scholar] [CrossRef]
- Gausman, H.W.; Menges, R.M.; Richardson, A.J.; Walter, H.; Rodriguez, R.R.; Tamez, S. Optical Parameters of Leaves of Seven Weed Species. Weed Sci. 1981, 29, 24–26. [Google Scholar] [CrossRef]
- Zwiggelaar, R. A review of spectral properties of plants and their potential use for crop/weed discrimination in row-crops. Crop. Prot. 1998, 17, 189–206. [Google Scholar] [CrossRef]
- Zhang, Y.; He, Y. Crop/weed discrimination using near-infrared reflectance spectroscopy (NIRS). In Proceedings of the Fourth International Conference on Photonics and Imaging in Biology and Medicine, Tianjin, China, 3–6 September 2005; p. 60472G. [Google Scholar] [CrossRef]
- Vrindts, E.; de Baerdemaeker, J. Optical weed detection and evaluation using reflection measurements. In Proceedings of the Photonics East (ISAM, VVDC, IEMB), Boston, MA, USA, 1–6 November 1998; pp. 279–289. [Google Scholar] [CrossRef]
- Pollet, P.; Feyaerts, F.; Wambacq, P.; van Gool, L. Weed Detection Based on Structural Information Using an Imaging Spectrograph. In Proceedings of the Fourth International Conference on Precision Agriculture, St Paul, MI, USA, 19–22 July 2015; pp. 1579–1591. [Google Scholar] [CrossRef]
- Vioix, J.-B.; Douzals, J.-P.; Truchetet, F.; Assémat, L.; Guillemin, J.-P. Spatial and Spectral Methods for Weed Detection and Localization. EURASIP J. Adv. Signal. Process 2002, 2002, 793080. [Google Scholar] [CrossRef]
- Manh, A.-G.; Rabatel, G.; Assemat, L.; Aldon, M.-J. AE—Automation and Emerging Technologies. J. Agric. Eng. Res. 2001, 80, 139–146. [Google Scholar] [CrossRef]
- Wang, N.; Zhang, N.; Dowell, F.E.; Sun, Y.; Peterson, D.E. Design Of An Optical Weed Sensor Usingplant Spectral Characteristics. Trans. ASAE 2001, 44, 409. [Google Scholar] [CrossRef]
- Jha, G.; Sihi, D.; Dari, B.; Kaur, H.; Nocco, M.A.; Ulery, A.; Lombard, K. Rapid and inexpensive assessment of soil total iron using Nix Pro color sensor. Agric. Environ. Lett. 2021, 6, e20050. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Merzlyak, M.N. Signature Analysis of Leaf Reflectance Spectra: Algorithm Development for Remote Sensing of Chlorophyll. J. Plant Physiol. 1996, 148, 494–500. [Google Scholar] [CrossRef]
- Noble, S.D.; Brown, R.; Crowe, T. The use of spectral proplerties for weed detection and identification—A review. In Proceedings of the CSAE/SCGR Annual Meeting, Saskatoon, SK, Canada, 14–17 July 2002. [Google Scholar]
- Chang, J.; Clay, S.A.; Clay, D.E.; Dalsted, K. Detecting weed-free and weed-infested areas of a soybean field using near-infrared spectral data. Weed Sci. 2004, 52, 642–648. [Google Scholar] [CrossRef]
- Panneton, B.L.; Bizeau, A. Merging RGB and NIR imagery for mapping weeds and crop in 3D. In Proceedings of the 2014 ASABE Annual International Meeting, Montreal, QC, Canada, 13–16 July 2014; pp. 1–7. [Google Scholar] [CrossRef]
- Peteinatos, G.G.; Weis, M.; Andújar, D.; Ayala, V.R.; Gerhards, R. Potential use of ground-based sensor technologies for weed detection. Pest Manag. Sci. 2014, 70, 190–199. [Google Scholar] [CrossRef]
- Zhao, H.-T.; Feng, Y.-Z.; Chen, W.; Jia, G.-F. Application of invasive weed optimization and least square support vector machine for prediction of beef adulteration with spoiled beef based on visible near-infrared (Vis-NIR) hyperspectral imaging. Meat. Sci. 2019, 151, 75–81. [Google Scholar] [CrossRef]
- Wang, A.; Zhang, W.; Wei, X. A review on weed detection using ground-based machine vision and image processing techniques. Comput. Electron. Agric. 2019, 158, 226–240. [Google Scholar] [CrossRef]
- Brown, R.B.; Noble, S.D. Site-specific weed management: Sensing requirements—What do we need to see? Weed Sci. 2005, 53, 252–258. [Google Scholar] [CrossRef]
- McLennon, E.; Dari, B.; Jha, G.; Sihi, D.; Kankarla, V. Regenerative agriculture and integrative permaculture for sustainable and technology driven global food production and security. Agron. J. 2021, 113, 4541–4559. [Google Scholar] [CrossRef]
- Kamruzzaman, M.; Makino, Y.; Oshita, S. Online monitoring of red meat color using hyperspectral imaging. Meat. Sci. 2016, 116, 110–117. [Google Scholar] [CrossRef]
- Kamruzzaman, M.; Makino, Y.; Oshita, S. Rapid and non-destructive detection of chicken adulteration in minced beef using visible near-infrared hyperspectral imaging and machine learning. J. Food Eng. 2016, 170, 8–15. [Google Scholar] [CrossRef]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A Review on UAV-Based Applications for Precision Agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef]
- Weiss, M.; Jacob, F.; Duveiller, G. Remote sensing for agricultural applications: A meta-review. Remote Sens. Environ. 2020, 236, 111402. [Google Scholar] [CrossRef]
- Khanna, M.; Atallah, S.S.; Kar, S.; Sharma, B.; Wu, L.; Yu, C.; Chowdhary, G.; Soman, C.; Guan, K. Digital transformation for a sustainable agriculture in the United States: Opportunities and challenges. Agric. Econ. 2022, 53, 924–937. [Google Scholar] [CrossRef]
- Eide, A.; Koparan, C.; Zhang, Y.; Ostlie, M.; Howatt, K.; Sun, X. UAV-Assisted Thermal Infrared and Multispectral Imaging of Weed Canopies for Glyphosate Resistance Detection. Remote Sens. 2021, 13, 4606. [Google Scholar] [CrossRef]
- Pause, M.; Raasch, F.; Marrs, C.; Csaplovics, E. Monitoring Glyphosate-Based Herbicide Treatment Using Sentinel-2 Time Series—A Proof-of-Principle. Remote Sens. 2019, 11, 2541. [Google Scholar] [CrossRef]
- Picoli, G.J.; Carbonari, C.A.; Matos AK, A.; Rodrigues LF, O.S.; Velini, E.D. Influence Of Glyphosate On Susceptible And Resistant Ryegrass Populations To Herbicide. Planta Daninha 2017, 35. [Google Scholar] [CrossRef]
- Shirzadifar, A.; Bajwa, S.; Nowatzki, J.; Bazrafkan, A. Field identification of weed species and glyphosate-resistant weeds using high resolution imagery in early growing season. Biosyst. Eng. 2020, 200, 200–214. [Google Scholar] [CrossRef]
- Johnson, W.G.; Owen, M.D.K.; Kruger, G.R.; Young, B.G.; Shaw, D.R.; Wilson, R.G.; Wilcut, J.W.; Jordan, D.L.; Weller, S.C. U.S. Farmer Awareness of Glyphosate-Resistant Weeds and Resistance Management Strategies. Weed Technol. 2009, 23, 308–312. [Google Scholar] [CrossRef]
- Nocco, M.A.; Zipper, S.C.; Booth, E.G.; Cummings, C.R.; Loheide, S.P.; Kucharik, C.J. Combining Evapotranspiration and Soil Apparent Electrical Conductivity Mapping to Identify Potential Precision Irrigation Benefits. Remote Sens. 2019, 11, 2460. [Google Scholar] [CrossRef]
- Ebert, L.A.; Talib, A.; Zipper, S.C.; Desai, A.R.; U, K.T.P.; Chisholm, A.J.; Prater, J.; Nocco, M.A. How High to Fly? Mapping Evapotranspiration from Remotely Piloted Aircrafts at Different Elevations. Remote Sens. 2022, 14, 1660. [Google Scholar] [CrossRef]
- Zhou, Z.; Plauborg, F.; Thomsen, A.G.; Andersen, M.N. A RVI/LAI-reference curve to detect N stress and guide N fertigation using combined information from spectral reflectance and leaf area measurements in potato. Eur. J. Agron. 2017, 87, 1–7. [Google Scholar] [CrossRef]
- Frels, K.; Guttieri, M.; Joyce, B.; Leavitt, B.; Baenziger, P.S. Evaluating canopy spectral reflectance vegetation indices to estimate nitrogen use traits in hard winter wheat. Field Crops Res. 2018, 217, 82–92. [Google Scholar] [CrossRef]
- Ač, A.; Malenovský, Z.; Olejníčková, J.; Gallé, A.; Rascher, U.; Mohammed, G. Meta-analysis assessing potential of steady-state chlorophyll fluorescence for remote sensing detection of plant water, temperature and nitrogen stress. Remote Sens. Environ. 2015, 168, 420–436. [Google Scholar] [CrossRef]
- Zhang, C.; Filella, I.; Liu, D.; Ogaya, R.; Llusià, J.; Asensio, D.; Peñuelas, J. Photochemical Reflectance Index (PRI) for Detecting Responses of Diurnal and Seasonal Photosynthetic Activity to Experimental Drought and Warming in a Mediterranean Shrubland. Remote Sens. 2017, 9, 1189. [Google Scholar] [CrossRef]
- AL-Saddik, H.; Simon, J.-C.; Cointault, F. Development of Spectral Disease Indices for ‘Flavescence ’Dorée’ Grapevine Disease Identification. Sensors 2017, 17, 2772. [Google Scholar] [CrossRef]
- Gara, T.; Darvishzadeh, R.; Skidmore, A.; Wang, T. Impact of Vertical Canopy Position on Leaf Spectral Properties and Traits across Multiple Species. Remote Sens. 2018, 10, 346. [Google Scholar] [CrossRef]
- Shirzadifar, A.; Bajwa, S.; Mireei, S.A.; Howatt, K.; Nowatzki, J. Weed species discrimination based on SIMCA analysis of plant canopy spectral data. Biosyst. Eng. 2018, 171, 143–154. [Google Scholar] [CrossRef]
- Shirzadifar, A.; Bajwa, S.; Nowatzki, J.; Shojaeiarani, J. Development of spectral indices for identifying glyphosate-resistant weeds. Comput. Electron. Agric. 2020, 170, 105276. [Google Scholar] [CrossRef]
- Xia, F.; Quan, L.; Lou, Z.; Sun, D.; Li, H.; Lv, X. Identification and Comprehensive Evaluation of Resistant Weeds Using Unmanned Aerial Vehicle-Based Multispectral Imagery. Front. Plant Sci. 2022, 13, 938604. [Google Scholar] [CrossRef]
- Cho, M.A.; Skidmore, A.K. A new technique for extracting the red edge position from hyperspectral data: The linear extrapolation method. Remote Sens. Environ. 2006, 101, 181–193. [Google Scholar] [CrossRef]
- Chen, L.; Kaewkorn, S.; He, L.; Zhang, Q.; Karkee, M. Design and Evaluation of a Levelling System for a Weeding Robot. IFAC-Pap. 2016, 49, 299–304. [Google Scholar] [CrossRef]
- Qu, Y.; Xiao, Z.; Zhou, G.; Liang, X.; Li, X. Mapping the distribution of Crofton weed (Eupatorium adenophorum spreng) in southwest of China using time series remote sensing data. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 660–663. [Google Scholar] [CrossRef]
- Lazar, A.; Bechar, A. Four-band weed detection using machine learning algorithms based on hyperspectral images. Precis. Agric. 2021, 21, 233–240. [Google Scholar] [CrossRef]
- Oršolić, D.; Pehar, V.; Šmuc, T.; Stepanić, V. Comprehensive machine learning based study of the chemical space of herbicides. Sci. Rep. 2021, 11, 11479. [Google Scholar] [CrossRef]
- Retzinger, E.J.; Mallory-Smith, C. Classification of Herbicides by Site of Action for Weed Resistance Management Strategies. Weed Technol. 1997, 11, 384–393. [Google Scholar] [CrossRef]
- Li, L.; Fan, Y.; Huang, X.; Tian, L. Real- time UAV weed scout for selective weed control by adaptive robust control and machine learning algorithm. In Proceedings of the 2016 ASABE International Meeting, Orlando, FL, USA, 17–20 July 2016. [Google Scholar] [CrossRef]
- Scherrer, B.; Sheppard, J.; Jha, P.; Shaw, J.A. Hyperspectral imaging and neural networks to classify herbicide-resistant weeds. J. Appl. Remote Sens. 2019, 13, 1. [Google Scholar] [CrossRef]
- Kujawa, S.; Niedbała, G. Artificial Neural Networks in Agriculture. Agriculture 2021, 11, 497. [Google Scholar] [CrossRef]
- Islam, N.; Rashid, M.; Wibowo, S.; Xu, C.-Y.; Morshed, A.; Wasimi, S.; Moore, S.; Rahman, S. Early Weed Detection Using Image Processing and Machine Learning Techniques in an Australian Chilli Farm. Agriculture 2021, 11, 387. [Google Scholar] [CrossRef]
- Zhang, T.; Huang, Y.; Reddy, K.N.; Yang, P.; Zhao, X.; Zhang, J. Using Machine Learning and Hyperspectral Images to Assess Damages to Corn Plant Caused by Glyphosate and to Evaluate Recoverability. Agronomy 2021, 11, 583. [Google Scholar] [CrossRef]
- Jin, X.; Bagavathiannan, M.; Maity, A.; Chen, Y.; Yu, J. Deep learning for detecting herbicide weed control spectrum in turfgrass. Plant Methods 2022, 18, 94. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).