



Micro-Mobility Sharing System Accident Case Analysis by Statistical Machine Learning Algorithms


Abstract
:1. Introduction
2. Methodology
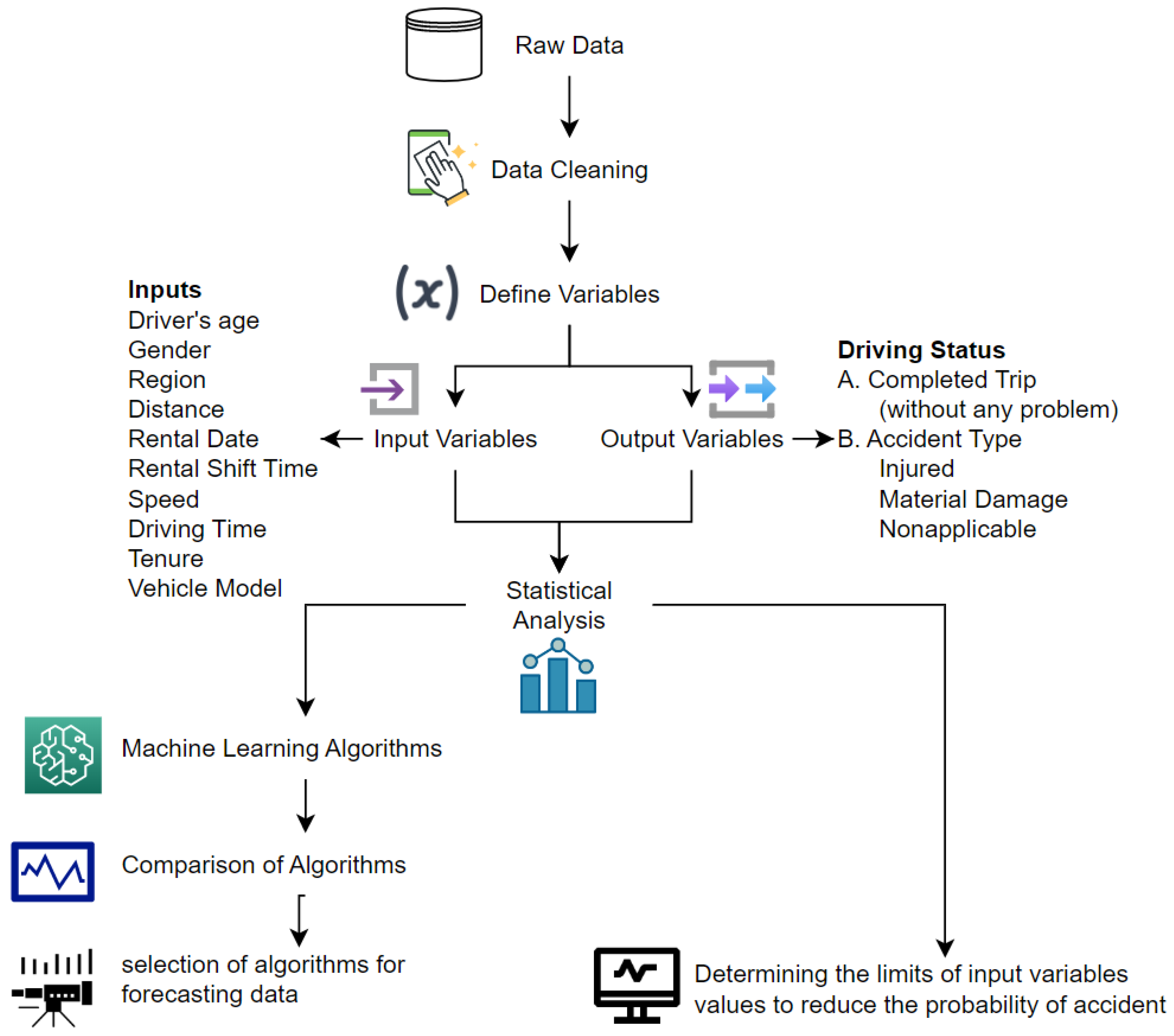
2.1. Data Compilation
- Completion of rides using an e-scooter without any problems;
- Failure to complete the rides using an e-scooter as a result of an injury accident;
- Failure to complete the rides using an e-scooter as a result of an accident with material damage;
- Failure to complete the rides using an e-scooter due to reasons for which the type of injury or damage could not be determined as a result of the accident.
2.2. Descriptive Statistics
2.3. Machine Learning
2.3.1. Support Vector Machine (SVM)
2.3.2. Neural Network (NN)
- Ignores unknowns from target values and removes them from the algorithm;
- Categorical input continues to use the data of the variables;
- Removes nondata partitions from the analysis;
- Adds missing data to the study by associating them with the mean value of the available data.
2.3.3. Random Forest (RF)
- Removes instances with unknown output variable values;
- Allows the use of categorical variables;
- Associates missing data with the mean values of other data.
2.3.4. k-Nearest Neighbor (kNN)
- Euclidean (distance between two points as a straight line);
- Manhattan (sum of absolute differences of features);
- Maximal (most considerable fundamental differences between attributes);
- Mahalanobis (distance between point and distribution).
2.3.5. AdaBoost
| Algorithm1 SAMME.R |
| Step 1. Initialize the observation weights Step 2. For to : Step 2.1. fit a classifier to the training data using weights . Step 2.2. obtain the weighted class probability estimates: Step 2.3. set: . Step 2.4. set: . Step 2.5. re-normalize . Step 3. Output . |
2.4. Performance Criteria Measurements of Machine Learning
- A high F1 score depends on high recall and precision values;
- Low recall and precision values cause a low F1 score for an ML algorithm;
- An inverse relationship between the recall and precision values ensures that the F1 score has an average value.
2.5. Argument Data Suggestions for Driver Statuses
3. Results
3.1. Statistical Analysis
3.2. Results of Machine Learning
4. Discussion
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample 1 | Sample 2 | N | Correlation | 95% CI for ρ | p-Value |
|---|---|---|---|---|---|
| Tenure | Model | 263 | 0.112 | (−0.009, 0.230) | 0.070 |
| Distance | Model | 263 | 0.087 | (−0.034, 0.206) | 0.158 |
| Rental Time | Model | 263 | −0.023 | (−0.144, 0.098) | 0.710 |
| Driving Time | Model | 263 | −0.005 | (−0.126, 0.116) | 0.940 |
| Distance | Tenure | 263 | −0.053 | (−0.173, 0.068) | 0.390 |
| Rental Time | Tenure | 263 | 0.008 | (−0.113, 0.129) | 0.899 |
| Driving Time | Tenure | 263 | −0.112 | (−0.230, 0.009) | 0.070 |
| Rental Time | Distance | 263 | −0.112 | (−0.230, 0.009) | 0.069 |
| Driving Time | Distance | 263 | 0.565 | (0.476, 0.642) | 0.000 |
| Driving Time | Rental Time | 263 | −0.139 | (−0.255, −0.018) | 0.024 |
| Region | Response Variable | Formulas | Eq. Ref. | |
|---|---|---|---|---|
| Adana | Driving Status Numeric | = | −0.0122 + 0.000123 Rental Numbers + 0.02668 Driving Time (min)—0.13252 Distance (km) + 0.499 Speed (km/min) | (A1) |
| Antalya | Driving Status Numeric | = | −0.0533 + 0.000123 Rental Numbers + 0.02668 Driving Time (min)—0.13252 Distance (km) + 0.499 Speed (km/min) | (A2) |
| Bursa | Driving Status Numeric | = | −0.1583 + 0.000123 Rental Numbers + 0.02668 Driving Time (min)—0.13252 Distance (km) + 0.499 Speed (km/min) | (A3) |
| Diyarbakır | Driving Status Numeric | = | −0.0524 + 0.000123 Rental Numbers + 0.02668 Driving Time (min)—0.13252 Distance (km) + 0.499 Speed (km/min) | (A4) |
| Eskişehir | Driving Status Numeric | = | −0.1175 + 0.000123 Rental Numbers + 0.02668 Driving Time (min)—0.13252 Distance (km) + 0.499 Speed (km/min) | (A5) |
| Gaziantep | Driving Status Numeric | = | 0.0243 + 0.000123 Rental Numbers + 0.02668 Driving Time (min)—0.13252 Distance (km) + 0.499 Speed (km/min) | (A6) |
| İstanbul | Driving Status Numeric | = | 2.5050 + 0.000123 Rental Numbers + 0.02668 Driving Time (min)—0.13252 Distance (km) + 0.499 Speed (km/min) | (A7) |
| İzmir | Driving Status Numeric | = | −0.0514 + 0.000123 Rental Numbers + 0.02668 Driving Time (min)—0.13252 Distance (km) + 0.499 Speed (km/min) | (A8) |
| Kayseri | Driving Status Numeric | = | −0.0110 + 0.000123 Rental Numbers + 0.02668 Driving Time (min)—0.13252 Distance (km) + 0.499 Speed (km/min) | (A9) |
| Kocaeli | Driving Status Numeric | = | 0.107 + 0.000123 Rental Numbers + 0.02668 Driving Time (min)—0.13252 Distance (km) + 0.499 Speed (km/min) | (A10) |
| Konya | Driving Status Numeric | = | −0.0981 + 0.000123 Rental Numbers + 0.02668 Driving Time (min)—0.13252 Distance (km) + 0.499 Speed (km/min) | (A11) |
| Sakarya | Driving Status Numeric | = | 0.0158 + 0.000123 Rental Numbers + 0.02668 Driving Time (min)—0.13252 Distance (km) + 0.499 Speed (km/min) | (A12) |
| Samsun | Driving Status Numeric | = | −0.1157 + 0.000123 Rental Numbers + 0.02668 Driving Time (min)—0.13252 Distance (km) + 0.499 Speed (km/min) | (A13) |
| Trabzon | Driving Status Numeric | = | 2.908 + 0.000123 Rental Numbers + 0.02668 Driving Time (min)—0.13252 Distance (km) + 0.499 Speed (km/min) | (A14) |
| Uşak | Driving Status Numeric | = | 0.0015 + 0.000123 Rental Numbers + 0.02668 Driving Time (min)—0.13252 Distance (km) + 0.499 Speed (km/min) | (A15) |
| Gender | Model | Response Variable | Formulas | Eq. Ref. | |
|---|---|---|---|---|---|
| Female | M2.1 | Driving Status Numeric | = | 1.913 + 0.000264 Rental Numbers + 0.02650 Driving Time (min)—0.1077 Distance (km)—1.638 Speed (km/min) | (A16) |
| Female | M2.2 | Driving Status Numeric | = | 0.1822 + 0.000264 Rental Numbers + 0.02650 Driving Time (min)—0.1077 Distance (km)—1.638 Speed (km/min) | (A17) |
| Female | M2.3 | Driving Status Numeric | = | 0.7852 + 0.000264 Rental Numbers + 0.02650 Driving Time (min)—0.1077 Distance (km)—1.638 Speed (km/min) | (A18) |
| Male | M2.1 | Driving Status Numeric | = | 2.027 + 0.000264 Rental Numbers + 0.02650 Driving Time (min)—0.1077 Distance (km)—1.638 Speed (km/min) | (A19) |
| Male | M2.2 | Driving Status Numeric | = | 0.2960 + 0.000264 Rental Numbers + 0.02650 Driving Time (min)—0.1077 Distance (km)—1.638 Speed (km/min) | (A20) |
| Male | M2.3 | Driving Status Numeric | = | 0.8990 + 0.000264 Rental Numbers + 0.02650 Driving Time (min)—0.1077 Distance (km)—1.638 Speed (km/min) | (A21) |


References
- İnaç, H.; Ayözen, Y.; Atalan, A.; Dönmez, C.Ç. Estimation of Postal Service Delivery Time and Energy Cost with E-Scooter by Machine Learning Algorithms. Appl. Sci. 2022, 12, 12266. [Google Scholar] [CrossRef]
- Mukhtar, M.; Ashraf, A.; Frank, M.; Steenburg, S.D. Injury incidence and patterns associated with electric scooter accidents in a major metropolitan city. Clin. Imaging 2021, 74, 163–168. [Google Scholar] [CrossRef] [PubMed]
- Shah, N.R.; Aryal, S.; Wen, Y.; Cherry, C.R. Comparison of motor vehicle-involved e-scooter and bicycle crashes using standardized crash typology. J. Safety Res. 2021, 77, 217–228. [Google Scholar] [CrossRef] [PubMed]
- Glavić, D.; Trpković, A.; Milenković, M.; Jevremović, S. The E-Scooter Potential to Change Urban Mobility—Belgrade Case Study. Sustainability 2021, 13, 5948. [Google Scholar] [CrossRef]
- Button, K.; Frye, H.; Reaves, D. Economic regulation and E-scooter networks in the USA. Res. Transp. Econ. 2020, 84, 100973. [Google Scholar] [CrossRef]
- Insight, B. The Bike and Scootersharing Telematics Market; Berg Insight: Stockholm, Sweden, 2020. [Google Scholar]
- Shichman, I.; Shaked, O.; Factor, S.; Weiss-Meilik, A.; Khoury, A. Emergency department electric scooter injuries after the introduction of shared e-scooter services: A retrospective review of 3331 cases. World J. Emerg. Med. 2022, 13, 5. [Google Scholar] [CrossRef] [PubMed]
- Störmann, P.; Klug, A.; Nau, C.; Verboket, R.D.; Leiblein, M.; Müller, D.; Schweigkofler, U.; Hoffmann, R.; Marzi, I.; Lustenberger, T. Characteristics and Injury Patterns in Electric-Scooter Related Accidents—A Prospective Two-Center Report from Germany. J. Clin. Med. 2020, 9, 1569. [Google Scholar] [CrossRef]
- Gan-El, E.; Djomo, W.N.; Ciobanu, A.M.P.; Kaufman, L.; Djiélé, F.N.; Ulrix, M.; Kreps, B.; Plumacker, A.; Malinverni, S.; Bartiaux, M.; et al. Risk assessment, consequences, and epidemiology of electric scooter accidents admitted to an emergency department: A prospective observational study. Eur. J. Trauma Emerg. Surg. 2022, 48, 4847–4855. [Google Scholar] [CrossRef]
- Brauner, T.; Heumann, M.; Kraschewski, T.; Prahlow, O.; Rehse, J.; Kiehne, C.; Breitner, M.H. Web content mining analysis of e-scooter crash causes and implications in Germany. Accid. Anal. Prev. 2022, 178, 106833. [Google Scholar] [CrossRef]
- Graef, F.; Doll, C.; Niemann, M.; Tsitsilonis, S.; Stöckle, U.; Braun, K.F.; Wüster, J.; Märdian, S. Epidemiology, Injury Severity, and Pattern of Standing E-Scooter Accidents: 6-Month Experience from a German Level I Trauma Center. Clin. Orthop. Surg. 2021, 13, 443. [Google Scholar] [CrossRef]
- Mayhew, L.J.; Bergin, C. Impact of e-scooter injuries on Emergency Department imaging. J. Med. Imaging Radiat. Oncol. 2019, 63, 461–466. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Beck, S.; Barker, L.; Chan, A.; Stanbridge, S. Emergency department impact following the introduction of an electric scooter sharing service. Emerg. Med. Australas. 2020, 32, 409–415. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Azimian, A.; Jiao, J. Modeling factors contributing to dockless e-scooter injury accidents in Austin, Texas. Traffic Inj. Prev. 2022, 23, 107–111. [Google Scholar] [CrossRef] [PubMed]
- Wüster, J.; Voß, J.; Koerdt, S.; Beck-Broichsitter, B.; Kreutzer, K.; Märdian, S.; Lindner, T.; Heiland, M.; Doll, C. Impact of the Rising Number of Rentable E-scooter Accidents on Emergency Care in Berlin 6 Months after the Introduction: A Maxillofacial Perspective. Craniomaxillofacial Trauma Reconstr. 2021, 14, 43–48. [Google Scholar] [CrossRef]
- Ishmael, C.R.; Hsiue, P.P.; Zoller, S.D.; Wang, P.; Hori, K.R.; Gatto, J.D.; Li, R.; Jeffcoat, D.M.; Johnson, E.E.; Bernthal, N.M. An Early Look at Operative Orthopaedic Injuries Associated with Electric Scooter Accidents: Bringing High-Energy Trauma to a Wider Audience. J. Bone Jt. Surg. 2020, 102, e18. [Google Scholar] [CrossRef]
- Reck, D.J.; Martin, H.; Axhausen, K.W. Mode choice, substitution patterns and environmental impacts of shared and personal micro-mobility. Transp. Res. Part D Transp. Environ. 2022, 102, 103134. [Google Scholar] [CrossRef]
- Ayözen, Y.E.; İnaç, H.; Atalan, A.; Dönmez, C.Ç. E-Scooter Micro-Mobility Application for Postal Service: The Case of Turkey for Energy, Environment, and Economy Perspectives. Energies 2022, 15, 7587. [Google Scholar] [CrossRef]
- Arslan, E.; Uyulan, Ç. Analysis of an e-scooter and rider system dynamic response to curb traversing through physics-informed machine learning methods. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022, 0, 095440702211001. [Google Scholar] [CrossRef]
- Kim, S.; Choo, S.; Lee, G.; Kim, S. Predicting Demand for Shared E-Scooter Using Community Structure and Deep Learning Method. Sustainability 2022, 14, 2564. [Google Scholar] [CrossRef]
- Kleinertz, H.; Ntalos, D.; Hennes, F.; Nüchtern, J.; Frosch, K.-H.; Thiesen, D.M. Accident Mechanisms and Injury Patterns in E-Scooter Users. Dtsch. Arztebl. Int. 2021, 118, 117–121. [Google Scholar] [CrossRef]
- Badeau, A.; Carman, C.; Newman, M.; Steenblik, J.; Carlson, M.; Madsen, T. Emergency department visits for electric scooter-related injuries after introduction of an urban rental program. Am. J. Emerg. Med. 2019, 37, 1531–1533. [Google Scholar] [CrossRef] [PubMed]
- Cittadini, F.; Aulino, G.; Petrucci, M.; Valentini, S.; Covino, M. Electric scooter–related accidents: A possible protective effect of helmet use on the head injury severity. Forensic Sci. Med. Pathol. 2022, 1–6. [Google Scholar] [CrossRef]
- Ahluwalia, R.; Grainger, C.; Coffey, D.; Malhotra, P.-S.; Sommerville, C.; Tan, P.S.; Johal, K.; Sivaprakasam, M.; Almousa, O.; Janakan, G.; et al. The e-scooter pandemic at a UK Major Trauma Centre: A cost-based cohort analysis of injury presentation and treatment. Surgeon 2022. [Google Scholar] [CrossRef] [PubMed]
- Severengiz, S.; Schelte, N.; Bracke, S. Analysis of the environmental impact of e-scooter sharing services considering product reliability characteristics and durability. Procedia CIRP 2021, 96, 181–188. [Google Scholar] [CrossRef]
- Yang, H.; Ma, Q.; Wang, Z.; Cai, Q.; Xie, K.; Yang, D. Safety of micro-mobility: Analysis of E-Scooter crashes by mining news reports. Accid. Anal. Prev. 2020, 143, 105608. [Google Scholar] [CrossRef] [PubMed]
- Gioldasis, C.; Christoforou, Z.; Seidowsky, R. Risk-taking behaviors of e-scooter users: A survey in Paris. Accid. Anal. Prev. 2021, 163, 106427. [Google Scholar] [CrossRef] [PubMed]
- Stigson, H.; Malakuti, I.; Klingegård, M. Electric scooters accidents: Analyses of two Swedish accident data sets. Accid. Anal. Prev. 2021, 163, 106466. [Google Scholar] [CrossRef]
- Posirisuk, P.; Baker, C.; Ghajari, M. Computational prediction of head-ground impact kinematics in e-scooter falls. Accid. Anal. Prev. 2022, 167, 106567. [Google Scholar] [CrossRef]
- Haworth, N.; Schramm, A.; Twisk, D. Comparing the risky behaviours of shared and private e-scooter and bicycle riders in downtown Brisbane, Australia. Accid. Anal. Prev. 2021, 152, 105981. [Google Scholar] [CrossRef]
- Nikiforiadis, A.; Paschalidis, E.; Stamatiadis, N.; Raptopoulou, A.; Kostareli, A.; Basbas, S. Analysis of attitudes and engagement of shared e-scooter users. Transp. Res. Part D Transp. Environ. 2021, 94, 102790. [Google Scholar] [CrossRef]
- Pazzini, M.; Cameli, L.; Lantieri, C.; Vignali, V.; Dondi, G.; Jonsson, T. New Micromobility Means of Transport: An Analysis of E-Scooter Users’ Behaviour in Trondheim. Int. J. Environ. Res. Public Health 2022, 19, 7374. [Google Scholar] [CrossRef] [PubMed]
- Atalan, A.; Şahin, H.; Atalan, Y.A. Integration of Machine Learning Algorithms and Discrete-Event Simulation for the Cost of Healthcare Resources. Healthcare 2022, 10, 1920. [Google Scholar] [CrossRef] [PubMed]
- Ceylan, Z.; Atalan, A. Estimation of healthcare expenditure per capita of Turkey using artificial intelligence techniques with genetic algorithm-based feature selection. J. Forecast. 2021, 40, 279–290. [Google Scholar] [CrossRef]
- Jordan, M.I.; Mitchell, T.M. Machine learning: Trends, perspectives, and prospects. Science 2015, 349, 255–260. [Google Scholar] [CrossRef] [PubMed]
- Akbulut, A.; Ertugrul, E.; Topcu, V. Fetal health status prediction based on maternal clinical history using machine learning techniques. Comput. Methods Programs Biomed. 2018, 163, 87–100. [Google Scholar] [CrossRef]
- Buehler, R.; Broaddus, A.; Sweeney, T.; Zhang, W.; White, E.; Mollenhauer, M. Changes in Travel Behavior, Attitudes, and Preferences among E-Scooter Riders and Nonriders: First Look at Results from Pre and Post E-Scooter System Launch Surveys at Virginia Tech. Transp. Res. Rec. J. Transp. Res. Board 2021, 2675, 335–345. [Google Scholar] [CrossRef]
- Jiao, J.; Bai, S. Understanding the Shared E-scooter Travels in Austin, TX. ISPRS Int. J. Geo-Inf. 2020, 9, 135. [Google Scholar] [CrossRef] [Green Version]
- Atalan, A. Forecasting drinking milk price based on economic, social, and environmental factors using machine learning algorithms. Agribusiness 2023, 39, 214–241. [Google Scholar] [CrossRef]
- Mani, I.; Zhang, I. kNN approach to unbalanced data distributions: A case study involving information extraction. In Proceedings of the Workshop on Learning from Imbalanced Datasets, Washington, DC, USA, 21 August 2003; Volume 126, pp. 1–7. [Google Scholar]
- Cortes, C.; Vapnik, V. Support-Vector Networks. Mach. Learn. 1995, 7, 273–297. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Rachmani, E.; Hsu, C.-Y.; Nurjanah, N.; Chang, P.W.; Shidik, G.F.; Noersasongko, E.; Jumanto, J.; Fuad, A.; Ningrum, D.N.A.; Kurniadi, A.; et al. Developing an Indonesia’s health literacy short-form survey questionnaire (HLS-EU-SQ10-IDN) using the feature selection and genetic algorithm. Comput. Methods Programs Biomed. 2019, 182, 105047. [Google Scholar] [CrossRef] [PubMed]
- Freund, Y.; Schapire, R.; Abe, N. A short introduction to boosting. J.-Jpn. Soc. Artif. Intell. 1999, 14, 1612. [Google Scholar]
- Schapire, R.E. Explaining AdaBoost. In Empirical Inference; Springer: Berlin/Heidelberg, Germany, 2013; pp. 37–52. [Google Scholar] [CrossRef]
- Hastie, T.; Rosset, S.; Zhu, J.; Zou, H. Multi-class adaboost. Stat. Interface 2009, 2, 349–360. [Google Scholar] [CrossRef] [Green Version]
- Zhou, X.; Tian, S.; An, J.; Yang, J.; Zhou, Y.; Yan, D.; Wu, J.; Shi, X.; Jin, X. Comparison of different machine learning algorithms for predicting air-conditioning operating behavior in open-plan offices. Energy Build. 2021, 251, 111347. [Google Scholar] [CrossRef]
- Cook, N.R. Statistical Evaluation of Prognostic versus Diagnostic Models: Beyond the ROC Curve. Clin. Chem. 2008, 54, 17–23. [Google Scholar] [CrossRef] [Green Version]
- Mun, S.-H.; Kwak, Y.; Huh, J.-H. A case-centered behavior analysis and operation prediction of AC use in residential buildings. Energy Build. 2019, 188–189, 137–148. [Google Scholar] [CrossRef]
- Atalan, A. Central Composite Design Optimization Using Computer Simulation Approach. Flexsim Q. Publ. 2014, 5, 19. Available online: https://www.researchgate.net/publication/321748315_Central_Composite_Design_Optimization_Using_Computer_Simulation_Approach (accessed on 20 November 2022).
- Santacreu, A.; Yannis, G.; de Saint Leon, O.; Crist, P. Safe micromobility. Sci. Engl. Med. 2020, 1–98. [Google Scholar]
- Latinopoulos, C.; Patrier, A.; Sivakumar, A. Planning for e-scooter use in metropolitan cities: A case study for Paris. Transp. Res. Part D Transp. Environ. 2021, 100, 103037. [Google Scholar] [CrossRef]
- Stray, A.V.; Siverts, H.; Melhuus, K.; Enger, M.; Galteland, P.; Næss, I.; Helseth, E.; Ramm-Pettersen, J. Characteristics of Electric Scooter and Bicycle Injuries after Introduction of Electric Scooter Rentals in Oslo, Norway. JAMA Netw. Open 2022, 5, e2226701. [Google Scholar] [CrossRef]
- Brownson, A.B.S.; Fagan, P.; Dickson, S.; Civil, I.D.S. Electric scooter injuries at Auckland City Hospital. NZ Med. J. 2019, 132, 62–72. [Google Scholar]
- Suominen, E.N.; Sajanti, A.J.; Silver, E.A.; Koivunen, V.; Bondfolk, A.S.; Koskimäki, J.; Saarinen, A.J. Alcohol intoxication and lack of helmet use are common in electric scooter-related traumatic brain injuries: A consecutive patient series from a tertiary university hospital. Acta Neurochir. 2022, 164, 643–653. [Google Scholar] [CrossRef]
- Jimenez-Martinez, M. Artificial Neural Networks for Passive Safety Assessment. Eng. Lett. 2022, 30, 1–9. [Google Scholar]
- Xie, Y.; Lord, D.; Zhang, Y. Predicting motor vehicle collisions using Bayesian neural network models: An empirical analysis. Accid. Anal. Prev. 2007, 39, 922–933. [Google Scholar] [CrossRef] [PubMed]
- Xiang, L. Simulation System of Car Crash Test in C-NCAP Analysis Based on an Improved Apriori Algorithm. Phys. Procedia 2012, 25, 2066–2071. [Google Scholar] [CrossRef] [Green Version]
- Turoń, K.; Czech, P. The Concept of Rules and Recommendations for Riding Shared and Private E-Scooters in the Road Network in the Light of Global Problems. In Modern Traffic Engineering in the System Approach to the Development of Traffic Networks; Springer Nature: Berlin/Heidelberg, Germany, 2020; pp. 275–284. [Google Scholar] [CrossRef]
- Mangold, M.; Zhao, P.; Haitao, H.; Mansourian, A. Geo-fence planning for dockless bike-sharing systems: A GIS-based multi-criteria decision analysis framework. Urban Inform. 2022, 1, 17. [Google Scholar] [CrossRef]
- Zhao, P.; Haitao, H.; Li, A.; Mansourian, A. Impact of data processing on deriving micro-mobility patterns from vehicle availability data. Transp. Res. Part D Transp. Environ. 2021, 97, 102913. [Google Scholar] [CrossRef]
- TUROŃ, K.; CZECH, P.; TÓTH, J. Safety and security aspects in shared mobility systems. Sci. J. Silesian Univ. Technol. Ser. Transp. 2019, 104, 169–175. [Google Scholar] [CrossRef]
- Cohen, J. Statistical Power Analysis for the Behavioral Sciences, 2nd ed.; Lawrence Erlbaum Associates: Hillsdale, MI, USA, 1988. [Google Scholar]










| Proposed | Method | Location/Data Source | Ref. |
|---|---|---|---|
| Analysis of the dynamic response of the e-scooter and driver system | Physics-informed ML algorithms | Nonapplicable, virtual | [19] |
| Estimating shared e-scooter demand in terms of community structure | DL | Korea | [20] |
| Analysis of accident mechanisms and injury patterns of e-scooter drivers | Statistical analysis | Germany | [21] |
| Estimation of energy and time cost in mail delivery with e-scooter vehicles | ML algorithms | Turkey | [1] |
| Analysis of injuries related to e-scooter drivers arriving in the emergency room | Descriptive statistics | U.S. | [22] |
| Analysis of helmet use in accidents involving electric scooters | Chi-square test, Yates’s correction, Fisher’s exact test, the Mann–Whitney U test | Italy | [23] |
| Cost-based cohort analysis for e-scooter-induced injury treatment | Statistical analysis | U.K. | [24] |
| Analysis of the environmental impact of e-scooter sharing services | LCA | Nonapplicable, simulation | [25] |
| Analysis of e-scooter accidents in terms of micro-mobility safety | Descriptive analysis and CTA | U.S. | [26] |
| Analysis of e-scooter vehicles in terms of environment, economy, and cost in mail delivery | Poisson regression model | Turkey | [18] |
| Risk-taking behavior of e-scooter drivers | A survey analysis | France | [27] |
| Analysis of e-scooter accidents | Descriptive statistics | Sweden | [28] |
| Analysis of factors that cause e-scooter injury accidents | ZIP and ZINB models | U.S. | [14] |
| Estimation of head-to-ground impact kinematics in falls of e-scooter riders | MDA | Nonapplicable, simulation | [29] |
| Analyzing the risky behavior of e-scooter and bicycle users | Statistical analysis | Australia | [30] |
| Estimating the driving status of e-scooter vehicles and calculating the optimum values of the variables | Statistical ML algorithms | Turkey | This Study |
| Variable | Gender | N | Mean | StDev | Variance | Min | Max | Skewness | Kurtosis |
|---|---|---|---|---|---|---|---|---|---|
| Rental Numbers | Female | 201 | 58.960 | 111.08 | 12,338.3 | 1.000 | 945.000 | 4.930 | 29.880 |
| Male | 731 | 70.260 | 108.01 | 11,665.9 | 1.000 | 1009.000 | 3.980 | 22.160 | |
| Driving Time (min) | Female | 201 | 13.260 | 18.40 | 338.49 | 1.000 | 135.000 | 4.000 | 20.200 |
| Male | 731 | 11.912 | 15.991 | 255.71 | 1.000 | 148.000 | 4.160 | 22.430 | |
| Distance (km) | Female | 201 | 1.815 | 2.146 | 4.607 | 0.100 | 18.100 | 3.600 | 18.800 |
| Male | 731 | 1.895 | 2.084 | 4.343 | 0.100 | 19.600 | 3.320 | 16.500 | |
| Speed (km/min) | Female | 201 | 0.169 | 0.074 | 0.005 | 0.004 | 0.342 | −0.050 | −0.440 |
| Male | 731 | 0.184 | 0.077 | 0.006 | 0.005 | 0.356 | −0.120 | −0.520 | |
| Start Time of Rental | Female | 201 | 29.751 | 10.71 | 114.65 | 1.000 | 47.000 | −1.290 | 1.240 |
| Male | 731 | 29.330 | 12.179 | 148.339 | 1.000 | 48.000 | −1.030 | 0.270 | |
| Driver Age | Female | 201 | 26.057 | 7.955 | 63.283 | 16.500 | 40.000 | 0.750 | −0.930 |
| Male | 731 | 23.576 | 6.847 | 46.885 | 16.500 | 40.000 | 1.060 | 0.070 | |
| Driving Status * | Female | 201 | 0.259 | 0.789 | 0.623 | 0.000 | 3.000 | 3.020 | 7.620 |
| Male | 731 | 0.302 | 0.862 | 0.743 | 0.000 | 3.000 | 2.700 | 5.540 |
| Model Parameters | Settings |
|---|---|
| Type | SVM |
| Cost (C) | 1.00 |
| Regression loss epsilon (ε) | 0.10 |
| Kernel | RBF, exp(-auto|x-y|2) |
| Numerical tolerance | 0.001 |
| Iteration limits | 100 |
| Model Parameters | Settings |
|---|---|
| Type | Neural network |
| Hidden Layer | 100 |
| Activation | ReLu |
| Solver | Adam |
| Alpha (regulation) | 0.0001 |
| Iteration limits (Maximum) | 200 |
| Replicable training | True |
| Model Parameters | Settings |
|---|---|
| Type | Random forest |
| Number of trees | 10 |
| Maximal number of considered features | Unlimited |
| Replicable training | No |
| Maximal tree depth | Unlimited |
| Stop splitting nodes with maximum instances | 5 |
| Model Parameters | Settings |
|---|---|
| Type | k-nearest neighbor |
| Number of neighbors | 5 |
| Metric (distance between two points) | Euclidean |
| Weight | Uniform |
| Model Parameters | Settings |
|---|---|
| Type | AdaBoost |
| Base estimator | Tree |
| The number of estimators | 50 |
| Algorithm (classification) | Samme.r |
| Loss (regression) | Linear |
| Total Number of Observations (P + N) | Predicted Observation | ||
|---|---|---|---|
| Positive (PP) | Negative (PN) | ||
| Actual Observation | Positive (P) | True positive (TP) | False negative (FP) |
| Negative (N) | False positive (FN) | True negative (TN) | |
| Term | Coef | SE Coef | T-Value | p-Value | VIF |
|---|---|---|---|---|---|
| Constant | 23.2 | 6.87 | 3.38 | 0.001 | |
| Rental Date | −0.00047 | 0.000154 | −3.08 | 0.002 | 1.19 |
| Rental Numbers | 0.000174 | 0.000092 | 1.89 | 0.059 | 1.06 |
| Driving Time (min) | 0.02556 | 0.00108 | 23.7 | 0.001 | 3.36 |
| Distance (km) | −0.12536 | 0.00844 | −14.85 | 0.001 | 3.31 |
| Speed (km/min) | 0.49 | 0.174 | 2.82 | 0.005 | 1.87 |
| Start Time of Rental | −0.00107 | 0.000929 | −1.16 | 0.248 | 1.29 |
| Age | −0.00105 | 0.00139 | −0.75 | 0.452 | 1.05 |
| Region | 0.001 | ||||
| Antalya | −0.0569 | 0.0542 | −1.05 | 0.294 | 5.36 |
| Bursa | −0.1287 | 0.0518 | −2.48 | 0.013 | 4.02 |
| Diyarbakır | −0.1097 | 0.0814 | −1.35 | 0.178 | 2.46 |
| Eskişehir | −0.0914 | 0.0598 | −1.53 | 0.127 | 2.31 |
| Gaziantep | 0.0369 | 0.0623 | 0.59 | 0.554 | 2.12 |
| İstanbul | 2.4984 | 0.0731 | 34.17 | 0.001 | 3.87 |
| İzmir | −0.0535 | 0.0679 | −0.79 | 0.431 | 1.76 |
| Kayseri | −0.0203 | 0.0976 | −0.21 | 0.835 | 1.28 |
| Kocaeli | 0.154 | 0.179 | 0.86 | 0.388 | 1.08 |
| Konya | −0.0838 | 0.0539 | −1.55 | 0.121 | 3.32 |
| Sakarya | 0.0301 | 0.0775 | 0.39 | 0.698 | 1.53 |
| Samsun | −0.1164 | 0.071 | −1.64 | 0.101 | 5.28 |
| Trabzon | 2.893 | 0.216 | 13.38 | 0.001 | 1.06 |
| Uşak | 0.0489 | 0.0923 | 0.53 | 0.596 | 1.33 |
| Model | 0.001 | ||||
| M2.2 | −1.899 | 0.309 | −6.15 | 0 | 209.21 |
| M2.3 | −1.889 | 0.306 | −6.18 | 0 | 204.65 |
| Gender | 0.109 | ||||
| Male | −0.0394 | 0.0245 | −1.61 | 0.109 | 1.08 |
| Stages | Model | AUC | CA | F1 | Precision | Recall |
|---|---|---|---|---|---|---|
| Training | SVM | 0.875 | 0.871 | 0.817 | 0.770 | 0.871 |
| RF | 0.944 | 0.964 | 0.947 | 0.931 | 0.964 | |
| kNN | 0.763 | 0.885 | 0.856 | 0.841 | 0.885 | |
| AB | 0.959 | 0.950 | 0.939 | 0.922 | 0.950 | |
| NN | 0.500 | 0.878 | 0.821 | 0.770 | 0.878 | |
| Testing | SVM | 0.723 | 0.878 | 0.821 | 0.770 | 0.878 |
| RF | 0.922 | 0.928 | 0.907 | 0.891 | 0.928 | |
| kNN | 0.804 | 0.863 | 0.839 | 0.821 | 0.863 | |
| AB | 0.800 | 0.935 | 0.928 | 0.924 | 0.935 | |
| NN | 0.500 | 0.878 | 0.821 | 0.770 | 0.878 |
| Model | Predicted Observation | Sum | ||||
|---|---|---|---|---|---|---|
| Actual Observations | Completed | Injured | Material Damage | Nonapplicable | ||
| SVM | Completed | 121.0 | 0.00 | 0.00 | 1.00 | 122.0 |
| Injured | 5.000 | 0.00 | 0.00 | 0.00 | 5.000 | |
| Material Damage | 0.000 | 0.00 | 0.00 | 0.00 | 0.000 | |
| Nonapplicable | 12.00 | 0.00 | 0.00 | 0.00 | 0.000 | |
| NN | Completed | 122.0 | 0.00 | 0.00 | 0.00 | 122.0 |
| Injured | 5.000 | 0.00 | 0.00 | 0.00 | 5.000 | |
| Material Damage | 0.000 | 0.00 | 0.00 | 0.00 | 0.000 | |
| Nonapplicable | 12.00 | 0.00 | 0.00 | 0.00 | 12.00 | |
| AB | Completed | 121.0 | 1.00 | 0.00 | 0.00 | 122.0 |
| Injured | 4.000 | 0.00 | 0.00 | 1.00 | 5.000 | |
| Material Damage | 0.000 | 0.00 | 0.00 | 0.00 | 0.000 | |
| Nonapplicable | 1.000 | 0.00 | 0.00 | 11.0 | 12.00 | |
| kNN | Completed | 119.0 | 0.00 | 0.00 | 3.00 | 122.0 |
| Injured | 5.000 | 0.00 | 0.00 | 0.00 | 5.000 | |
| Material Damage | 0.000 | 0.00 | 0.00 | 0.00 | 0.000 | |
| Nonapplicable | 8.000 | 0.00 | 0.00 | 4.00 | 12.00 | |
| RF | Completed | 122.0 | 0.00 | 0.00 | 0.00 | 122.0 |
| Injured | 3.000 | 0.00 | 0.00 | 2.00 | 5.000 | |
| Material Damage | 0.000 | 0.00 | 0.00 | 0.00 | 0.000 | |
| Nonapplicable | 4.000 | 0.00 | 0.00 | 8.00 | 12.00 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
İnaç, H. Micro-Mobility Sharing System Accident Case Analysis by Statistical Machine Learning Algorithms. Sustainability 2023, 15, 2097. https://doi.org/10.3390/su15032097
İnaç H. Micro-Mobility Sharing System Accident Case Analysis by Statistical Machine Learning Algorithms. Sustainability. 2023; 15(3):2097. https://doi.org/10.3390/su15032097
Chicago/Turabian Styleİnaç, Hakan. 2023. "Micro-Mobility Sharing System Accident Case Analysis by Statistical Machine Learning Algorithms" Sustainability 15, no. 3: 2097. https://doi.org/10.3390/su15032097
APA Styleİnaç, H. (2023). Micro-Mobility Sharing System Accident Case Analysis by Statistical Machine Learning Algorithms. Sustainability, 15(3), 2097. https://doi.org/10.3390/su15032097