
Center-Aware 3D Object Detection with Attention Mechanism Based on Roadside LiDAR
Abstract
:1. Introduction
2. Related Work
2.1. Camera-Based Roadside Detection
2.2. LiDAR-Based Roadside Detection
2.3. Transformer-Based 3D Detection
2.4. Roadside Dataset for Object Detection
2.5. Problems in Previous Work
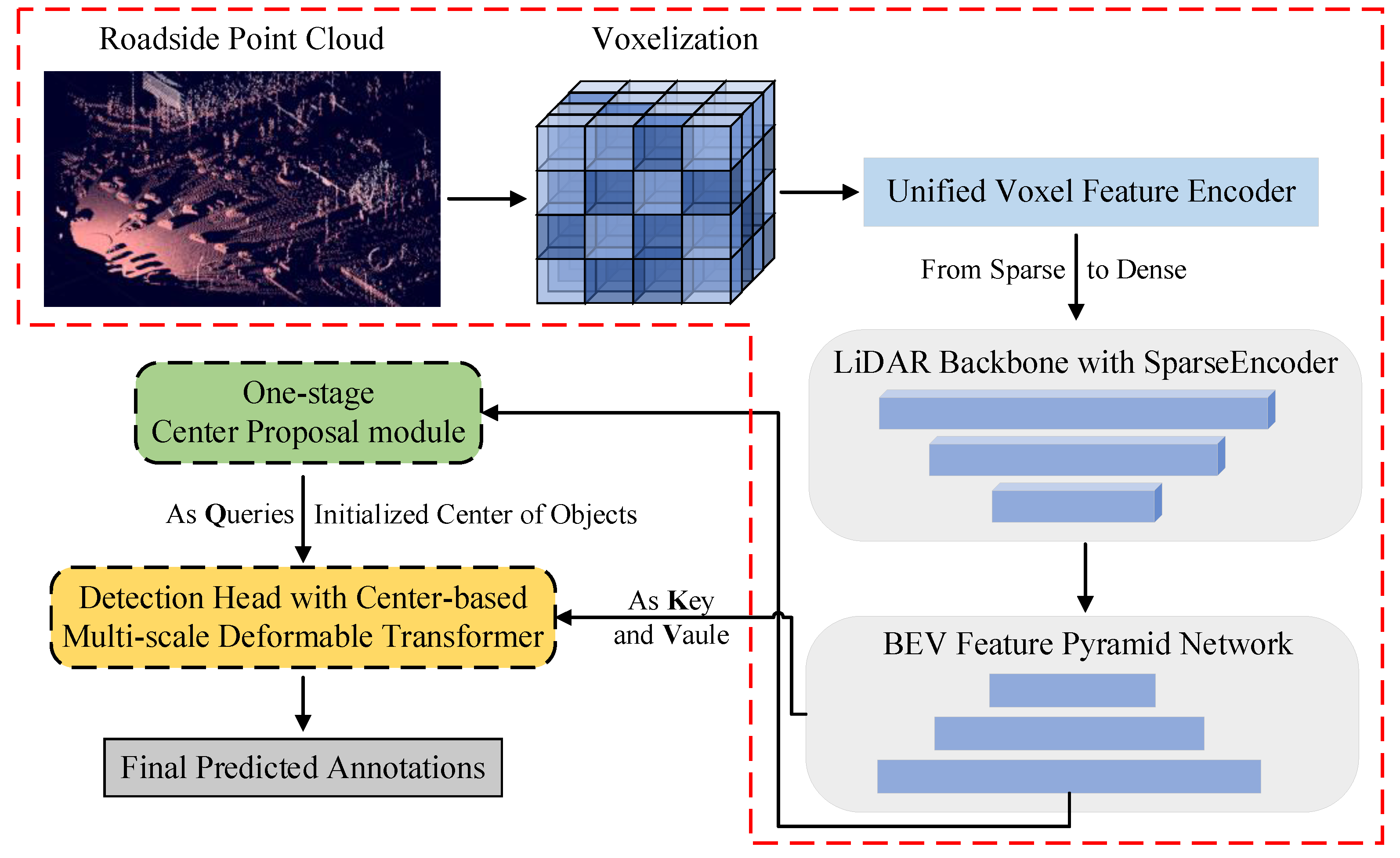
3. Approach
3.1. Roadside LiDAR Feature Encoder
3.2. One-Stage Center Proposal Module
3.3. Detection Head with Center Proposal and Deformable Attention
3.4. Label Assignment and Matching Losses
4. Experiments
4.1. Experimental Setup
4.2. Implementation Details
4.3. Performance Comparison on DAIR-V2X-I
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Creß, C.; Knoll, A.C. Intelligent Transportation Systems With The Use of External Infrastructure: A Literature Survey. arXiv 2021, arXiv:2112.05615. [Google Scholar]
- Caesar, H.; Bankiti, V.; Lang, A.H.; Vora, S.; Liong, V.E.; Xu, Q.; Krishnan, A.; Pan, Y.; Baldan, G.; Beijbom, O. nuscenes: A multimodal dataset for autonomous driving. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 11621–11631. [Google Scholar]
- Yin, T.; Zhou, X.; Krahenbuhl, P. Center-based 3d object detection and tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 11784–11793. [Google Scholar]
- Guo, E.; Chen, Z.; Rahardja, S.; Yang, J. 3D Detection and Pose Estimation of Vehicle in Cooperative Vehicle Infrastructure System. IEEE Sens. J. 2021, 21, 21759–21771. [Google Scholar] [CrossRef]
- Zou, Z.; Zhang, R.; Shen, S.; Pandey, G.; Chakravarty, P.; Parchami, A.; Liu, H.X. Real-time full-stack traffic scene perception for autonomous driving with roadside cameras. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; pp. 890–896. [Google Scholar]
- Sandler, M.; Howard, A.; Zhu, M.; Zhmoginov, A.; Chen, L.-C. Mobilenetv2: Inverted residuals and linear bottlenecks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 4510–4520. [Google Scholar]
- Wu, J.; Xu, H.; Zheng, J. Automatic background filtering and lane identification with roadside LiDAR data. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–6. [Google Scholar]
- Ester, M.; Kriegel, H.-P.; Sander, J.; Xu, X. A density-based algorithm for discovering clusters in large spatial databases with noise. kdd 1996, 96, 226–231. [Google Scholar]
- Li, J.; Cheng, J.-h.; Shi, J.-y.; Huang, F. Brief introduction of back propagation (BP) neural network algorithm and its improvement. In Advances in Computer Science and Information Engineering; Springer: Berlin/Heidelberg, Germany, 2012; pp. 553–558. [Google Scholar]
- Gong, Z.; Wang, Z.; Zhou, B.; Liu, W.; Liu, P. Pedestrian Detection Method Based on Roadside Light Detection and Ranging. SAE Int. J. Connect. Autom. Veh. 2021, 4, 413–422. [Google Scholar] [CrossRef]
- Bai, Z.; Nayak, S.P.; Zhao, X.; Wu, G.; Barth, M.J.; Qi, X.; Liu, Y.; Oguchi, K. Cyber Mobility Mirror: Deep Learning-based Real-time 3D Object Perception and Reconstruction Using Roadside LiDAR. arXiv 2022, arXiv:2202.13505. [Google Scholar] [CrossRef]
- Lang, A.H.; Vora, S.; Caesar, H.; Zhou, L.; Yang, J.; Beijbom, O. Pointpillars: Fast encoders for object detection from point clouds. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 12697–12705. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 21–37. [Google Scholar]
- Zimmer, W.; Grabler, M.; Knoll, A. Real-Time and Robust 3D Object Detection Within Road-Side LiDARs Using Domain Adaptation. arXiv 2022, arXiv:2204.00132. [Google Scholar]
- Zheng, W.; Tang, W.; Jiang, L.; Fu, C.-W. SE-SSD: Self-ensembling single-stage object detector from point cloud. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 14494–14503. [Google Scholar]
- Arnold, E.; Dianati, M.; de Temple, R.; Fallah, S. Cooperative perception for 3D object detection in driving scenarios using infrastructure sensors. IEEE Trans. Intell. Transp. Syst. 2020, 23, 1852–1864. [Google Scholar] [CrossRef]
- Bai, Z.; Wu, G.; Barth, M.J.; Liu, Y.; Sisbot, E.A.; Oguchi, K. Pillargrid: Deep learning-based cooperative perception for 3d object detection from onboard-roadside lidar. In Proceedings of the 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 8–12 October 2022; pp. 1743–1749. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. In Proceedings of the 31st Conference on Neural Information Processing Systems (NIPS 2017), Long Beach, CA, USA, 4–9 December 2017; Volume 30. [Google Scholar]
- Dosovitskiy, A.; Beyer, L.; Kolesnikov, A.; Weissenborn, D.; Zhai, X.; Unterthiner, T.; Dehghani, M.; Minderer, M.; Heigold, G.; Gelly, S. An image is worth 16x16 words: Transformers for image recognition at scale. arXiv 2020, arXiv:2010.11929. [Google Scholar]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin transformer: Hierarchical vision transformer using shifted windows. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 10012–10022. [Google Scholar]
- Carion, N.; Massa, F.; Synnaeve, G.; Usunier, N.; Kirillov, A.; Zagoruyko, S. End-to-end object detection with transformers. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020; pp. 213–229. [Google Scholar]
- Wang, Y.; Guizilini, V.C.; Zhang, T.; Wang, Y.; Zhao, H.; Solomon, J. Detr3d: 3d object detection from multi-view images via 3d-to-2d queries. In Proceedings of the Conference on Robot Learning, Auckland, New Zealand, 14–18 December 2022; pp. 180–191. [Google Scholar]
- Guan, T.; Wang, J.; Lan, S.; Chandra, R.; Wu, Z.; Davis, L.; Manocha, D. M3detr: Multi-representation, multi-scale, mutual-relation 3d object detection with transformers. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Waikoloa, HI, USA, 4–8 January 2022; pp. 772–782. [Google Scholar]
- Bhattacharyya, P.; Huang, C.; Czarnecki, K. Sa-det3d: Self-attention based context-aware 3d object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 3022–3031. [Google Scholar]
- Yan, Y.; Mao, Y.; Li, B. Second: Sparsely embedded convolutional detection. Sensors 2018, 18, 3337. [Google Scholar] [CrossRef]
- Shi, S.; Wang, X.; Li, H. Pointrcnn: 3d object proposal generation and detection from point cloud. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 770–779. [Google Scholar]
- Shi, S.; Guo, C.; Jiang, L.; Wang, Z.; Shi, J.; Wang, X.; Li, H. Pv-rcnn: Point-voxel feature set abstraction for 3d object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 10529–10538. [Google Scholar]
- Guo, M.-H.; Cai, J.-X.; Liu, Z.-N.; Mu, T.-J.; Martin, R.R.; Hu, S.-M. Pct: Point cloud transformer. Comput. Vis. Media 2021, 7, 187–199. [Google Scholar] [CrossRef]
- Liu, Z.; Zhao, X.; Huang, T.; Hu, R.; Zhou, Y.; Bai, X. Tanet: Robust 3d object detection from point clouds with triple attention. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020; pp. 11677–11684. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 770–778. [Google Scholar]
- Li, Z.; Wang, W.; Li, H.; Xie, E.; Sima, C.; Lu, T.; Yu, Q.; Dai, J. BEVFormer: Learning Bird’s-Eye-View Representation from Multi-Camera Images via Spatiotemporal Transformers. arXiv 2022, arXiv:2203.17270. [Google Scholar]
- Chen, X.; Zhang, T.; Wang, Y.; Wang, Y.; Zhao, H. Futr3d: A unified sensor fusion framework for 3d detection. arXiv 2022, arXiv:2203.10642. [Google Scholar]
- Bai, X.; Hu, Z.; Zhu, X.; Huang, Q.; Chen, Y.; Fu, H.; Tai, C.-L. Transfusion: Robust lidar-camera fusion for 3d object detection with transformers. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 1090–1099. [Google Scholar]
- Zhang, Y.; Chen, J.; Huang, D. CAT-Det: Contrastively Augmented Transformer for Multi-modal 3D Object Detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 908–917. [Google Scholar]
- Xu, D.; Anguelov, D.; Jain, A. Pointfusion: Deep sensor fusion for 3d bounding box estimation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 244–253. [Google Scholar]
- Geiger, A.; Lenz, P.; Urtasun, R. Are we ready for autonomous driving? The kitti vision benchmark suite. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 3354–3361. [Google Scholar]
- Sun, P.; Kretzschmar, H.; Dotiwalla, X.; Chouard, A.; Patnaik, V.; Tsui, P.; Guo, J.; Zhou, Y.; Chai, Y.; Caine, B. Scalability in perception for autonomous driving: Waymo open dataset. In Proceedings of the IEEE/CVF conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 2446–2454. [Google Scholar]
- Yongqiang, D.; Dengjiang, W.; Gang, C.; Bing, M.; Xijia, G.; Yajun, W.; Jianchao, L.; Yanming, F.; Juanjuan, L. BAAI-VANJEE Roadside Dataset: Towards the Connected Automated Vehicle Highway technologies in Challenging Environments of China. arXiv 2021, arXiv:2105.14370. [Google Scholar]
- Ye, X.; Shu, M.; Li, H.; Shi, Y.; Li, Y.; Wang, G.; Tan, X.; Ding, E. Rope3D: The Roadside Perception Dataset for Autonomous Driving and Monocular 3D Object Detection Task. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 21341–21350. [Google Scholar]
- Yu, H.; Luo, Y.; Shu, M.; Huo, Y.; Yang, Z.; Shi, Y.; Guo, Z.; Li, H.; Hu, X.; Yuan, J. DAIR-V2X: A Large-Scale Dataset for Vehicle-Infrastructure Cooperative 3D Object Detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 21361–21370. [Google Scholar]
- Dosovitskiy, A.; Ros, G.; Codevilla, F.; Lopez, A.; Koltun, V. CARLA: An open urban driving simulator. In Proceedings of the Conference on robot learning, Mountain View, CA, USA, 13–15 November 2017; pp. 1–16. [Google Scholar]
- Zhou, Y.; Tuzel, O. Voxelnet: End-to-end learning for point cloud based 3d object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 4490–4499. [Google Scholar]
- Lin, T.-Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. In Proceedings of the IEEE conference on computer vision and pattern recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2117–2125. [Google Scholar]
- Law, H.; Deng, J. Cornernet: Detecting objects as paired keypoints. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 734–750. [Google Scholar]
- Zhu, X.; Su, W.; Lu, L.; Li, B.; Wang, X.; Dai, J.F. DD Deformable transformers for end-to-end object detection. In Proceedings of the 9th International Conference on Learning Representations, Virtual Event, Austria, 3–7 May 2021. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards Real-Time Object Detection with Region Proposal Networks. Part of Advances in Neural Information Processing Systems 28 (NIPS 2015). 2015, Volume 28. Available online: https://proceedings.neurips.cc/paper/2015/file/14bfa6bb14875e45bba028a21ed38046-Paper.pdf (accessed on 14 July 2021).
- Kuhn, H.W. The Hungarian method for the assignment problem. Nav. Res. Logist. Q. 1955, 2, 83–97. [Google Scholar] [CrossRef]
- Lin, T.-Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal loss for dense object detection. In Proceedings of the IEEE International Conference on Computer Vision, Honolulu, HI, USA, 21–26 July 2017; pp. 2980–2988. [Google Scholar]
- Everingham, M.; Van Gool, L.; Williams, C.K.; Winn, J.; Zisserman, A. The pascal visual object classes (voc) challenge. Int. J. Comput. Vis. 2010, 88, 303–338. [Google Scholar] [CrossRef] [Green Version]
- Contributors, M.D. MMDetection3D: OpenMMLab Next-Generation Platform for General 3D Object Detection. 2020. Available online: https://github.com/open-mmlab/mmdetection3d (accessed on 10 December 2021).
- Graham, B.; Engelcke, M.; Van Der Maaten, L. 3d semantic segmentation with submanifold sparse convolutional networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 9224–9232. [Google Scholar]
- Loshchilov, I.; Hutter, F. Decoupled weight decay regularization. arXiv 2017, arXiv:1711.05101. [Google Scholar]
- Sindagi, V.A.; Zhou, Y.; Tuzel, O. Mvx-net: Multimodal voxelnet for 3d object detection. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 7276–7282. [Google Scholar]
- Wang, Y.; Solomon, J.M. Object dgcnn: 3d object detection using dynamic graphs. Adv. Neural Inf. Process. Syst. 2021, 34, 20745–20758. [Google Scholar]
- Fan, L.; Wang, F.; Wang, N.; Zhang, Z. Fully Sparse 3D Object Detection. arXiv 2022, arXiv:2207.10035. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Environment | Memory Cost | Training Time | Average Iteration Time | Training Epochs |
|---|---|---|---|---|---|
| PointPillars | Single NVIDIA RTX3090 GPU | 6.7 GB (batch size = 6) | 24 h | 0.2782 s/iter | 160 |
| SECOND | 6.0 GB (batch size = 6) | 8 h | 0.3616 s/iter | 80 | |
| MVX-NET | 3.9 GB (batch size = 1) | 30 h | 0.2502 s/iter | 80 | |
| Object DGCNN(voxel) | Single NVIDIA A100 GPU 40G | 13.7 GB (batch size = 4) | 17 h | 0.5813 s/iter | 80 |
| FSD | 7.4 GB (batch size = 2) | 26 h | 0.4851 s/iter | 80 | |
| Ours | 5.3 GB (batch size = 4) | 16.5 h | 0.5917 s/iter | 80 |
| Method | Modality | Car BEV AP (%) | Pedestrian BEV AP (%) | Cyclist BEV AP (%) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| L | I | Easy | Moderate | Hard | Easy | Moderate | Hard | Easy | Moderate | Hard | |
| PointPillars [12] | √ | 63.58 | 54.49 | 54.50 | 50.36 | 44.58 | 44.56 | 47.10 | 24.86 | 27.08 | |
| SECOND [25] | √ | 63.60 | 54.51 | 54.51 | 70.23 | 67.18 | 67.25 | 60.07 | 33.29 | 33.41 | |
| Object DGCNN(voxel) [54] | √ | 61.81 | 52.58 | 52.79 | 64.91 | 62.02 | 62.53 | 58.46 | 32.17 | 32.53 | |
| FSD [55] | √ | 69.63 | 54.51 | 60.61 | 70.68 | 69.59 | 69.77 | 67.37 | 35.65 | 36.70 | |
| MVX-NET [53] | √ | √ | 63.54 | 54.45 | 54.46 | 71.59 | 71.17 | 71.21 | 63.42 | 34.27 | 34.43 |
| Ours | √ | 70.97 | 54.23 | 61.96 | 74.43 | 70.79 | 70.86 | 67.85 | 35.94 | 38.32 | |
| Method | Modality | Car 3D AP (%) | Pedestrian 3D AP (%) | Cyclist 3D AP (%) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| L | I | Easy | Moderate | Hard | Easy | Moderate | Hard | Easy | Moderate | Hard | |
| PointPillars [12] | √ | 63.57 | 54.49 | 54.49 | 50.23 | 44.52 | 44.51 | 47.08 | 24.85 | 27.07 | |
| SECOND [25] | √ | 63.59 | 54.51 | 54.51 | 70.06 | 67.05 | 67.12 | 60.05 | 33.29 | 33.41 | |
| Object DGCNN (voxel) [54] | √ | 61.53 | 52.34 | 52.56 | 64.15 | 61.01 | 61.52 | 58.33 | 32.14 | 32.49 | |
| FSD [55] | √ | 69.60 | 54.51 | 54.51 | 70.54 | 69.38 | 69.61 | 67.29 | 35.64 | 36.68 | |
| MVX-NET [53] | √ | √ | 63.54 | 54.46 | 54.46 | 71.39 | 70.89 | 70.97 | 63.34 | 34.25 | 34.41 |
| Ours | √ | 70.82 | 54.19 | 61.83 | 74.11 | 70.45 | 70.50 | 67.73 | 35.91 | 37.28 | |
| Method | Input Query Type | Detection Head | Cyclist 3D AP (%) | ||||
|---|---|---|---|---|---|---|---|
| BEV Feature Map | Center-Aware Proposal | Anchor-Based | Transformer-Based | Easy | Moderate | Hard | |
| Baseline | √ | √ | 60.05 | 33.29 | 33.41 | ||
| √ | √ | 58.33 | 32.14 | 32.49 | |||
| CetrRoad | √ | √ | 67.73 | 35.91 | 37.28 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, H.; Hou, D.; Li, X. Center-Aware 3D Object Detection with Attention Mechanism Based on Roadside LiDAR. Sustainability 2023, 15, 2628. https://doi.org/10.3390/su15032628
Shi H, Hou D, Li X. Center-Aware 3D Object Detection with Attention Mechanism Based on Roadside LiDAR. Sustainability. 2023; 15(3):2628. https://doi.org/10.3390/su15032628
Chicago/Turabian StyleShi, Haobo, Dezao Hou, and Xiyao Li. 2023. "Center-Aware 3D Object Detection with Attention Mechanism Based on Roadside LiDAR" Sustainability 15, no. 3: 2628. https://doi.org/10.3390/su15032628