1. Introduction
Localization is a key component of advanced applications and vehicle systems as well as precision. It is essential for navigation services, route planning, and other services that lead to intelligent mobility. Cooperative systems are an example that requires positioning accuracy to provide data transition [
1], but this is equally important for the field of autonomous vehicles and other smart applications.
Most of the services provided use the global navigation satellite system (GNSS), and this approach covers a significant part of the road network. However, there are places where GNSS-based localization is inaccurate or unavailable. This may be, for example, in areas of dense and high-rise buildings where signal is limited. In such cases, inaccuracies may occur. There are methods where, on the contrary, by using GNSS signal reflections in conjunction with 3D city models [
2], the localization method is refined not only based on triangulation, but also on the basis of signal strength.
However, in terms of traffic, there are also places where GNSS-based services are not even theoretically possible to use, e.g., mountain passes, in particular underground structures such as tunnels that are not covered [
3]. This type of road infrastructure is very important from a traffic point of view due to the high volume of traffic flow, the lack of an alternative route, and also due to additional traffic-related risks (changing environmental conditions, brightness, or temperature) [
4]. The use of precise location and traffic data exchange is necessary for emergency services or tunnel operators, who need to know the exact positions of vehicles. Knowledge is also needed for drivers, especially if there is a crossing, a complex structure of entrances, or exits from the tunnel itself, but mainly it can reduce the mentioned traffic related risks. There is also a need for accurate navigation for future autonomous vehicles.
In tunnels, GNSS-based services become unavailable, and not only is the overall functionality of the system limited, but there are also other consequences that can affect user awareness and, most importantly, overall traffic safety [
5].
Therefore, it is essential to eliminate these “blind spots”, which have a major impact on the range of services provided in tunnel construction, where safety is an absolutely crucial issue compared to other roads. Several solutions already exist today with the main goal of replacing or optimizing GNSS principles and further developing an advanced system. The overlap with R&D and other scientific activities is obvious.
In this article, a technical background is presented, the issue of localization in road tunnels is discussed, then the technologies that lie in the Bluetooth standard are briefly presented, as well as the releases of standard Bluetooth, especially with a focus on Bluetooth low energy (BLE), which is a key factor in the proposed architecture and solution ensuring localization in tunnels. The literature review on how BLE is used in transportation is then discussed with examples of other relevant research articles. Finally, the methodology and results are presented and discussed with conclusions and benefits that are implied from this tested solution, and lastly, future work and possible outcomes are also presented.
2. Background
This background section introduces the issue of localization in road tunnels and also describes alternative approaches that could be used for specific purposes that require an estimation of position. Consequently, the advantages and limitations of these alternative approaches are analyzed. However, the general problem of localization methods lies in the end device support, which could also be ensured by using BLE (Bluetooth low energy).
Moreover, the specifics of BLE are briefly discussed in relation to a general overview of this generally known Bluetooth standard and its version and releases, which are discussed in the line of changes during the years. Finally, the background section provides a literature review of the use of Bluetooth standard, specifics, and use cases related to the field of transportation sciences.
2.1. Localization Issue in Road Tunnels
The issue of vehicle location is currently handled in several different ways. There are advanced in-vehicle systems that track vehicle movement and calculate speed based on measurements of various parameters using steering wheel rotation, wheel spin speed, odometry, etc. [
6], but this is mainly related to in-vehicle systems.
Another example is the use of 3D accelerators, which are also implemented, for example, in mobile phones and communication units. In such approaches, there is a divergence in time, and thus the localization may be inaccurate; it is highly affected by the precision of the mathematical approach used for its estimation. Generally, in navigation solutions, the principles of dead reckoning [
7] and map matching [
8] are used, which substantially improve the accuracy of the device location calculation. However, tunnel structures are often of varying gradients, ramps, and exits, leading to inaccuracies and reflections, as the calculated position cannot be verified in any way for such systems. Therefore, everything is based solely on the accuracy of the potential triangulation calculation or the strength of the signal.
Another method is the so-called GNSS repeater, which senses the position of the GNSS above the surface, after which the signal is fed directly to the place where localization is required [
9], in this case into the tunnel structure. Here, however, the problem arises that the signal is propagated only locally and does not cover the tunnel structure in its entirety. Therefore, the target equipment can be completely “confused” that it is picking up a GNSS signal in a certain section and, therefore, the equipment reports the same position at a given moment, resulting in a significant loss of position accuracy.
Another option may be to use a distribution cable that covers the entire tunnel structure, but this solution is economically challenging and overpriced compared to BLE.
The use of BLE equipment for indoor positioning and marketing purposes is widely used, and it seems that similar principles could be replicated in tunnel structures, which can significantly optimize device location at relatively low installation and low maintenance costs. Moreover, maintenance efficiency is absolutely essential in tunnels because traffic must be restricted at that time [
10,
11], so the operational life cycle should be considered from the perspective of technological components as well as the building itself [
11,
12].
2.2. Bluetooth Low Energy
BLE is part of the Bluetooth standard that is used for a wide range of applications, such as connection to speakers, headphones, in-car infotainment, and other systems. Bluetooth transmits data in the unlicensed industrial, scientific, and medical frequency band 2.4 GHz to other equipment in the environment through point-to-point wireless communication. An evolution of the Bluetooth standard is presented below in
Table 1 [
13].
As seen in the table, BLE was launched within Bluetooth version 4.0 in 2010. The BLE telecommunication protocol is designed for specific purposes where power consumption is crucial. It works with very low power resources, and therefore the device can use only an internal battery to ensure many years of operation. The BLE enables broadcast communication without the need for advanced approaches that require computing power of the equipment [
13]. Due to its properties, BLE has become the cornerstone of indoor localization. This solution becomes relatively inexpensive in terms of implementation, as well as operation and maintenance. In many articles, the BLE principles are evaluated, and it seems that the solutions provide a significant impact on indoor positioning accuracy. However, positioning accuracy is strongly affected by the number of beacons installed in the area. For example, Myungin et al. [
14] analyzed the accuracy of BLE-based positioning. The results demonstrated that the overall received signal strength indication (RSSI) is clearly low compared to other technologies such as Wi-Fi. The standard is constantly evolving over time, but RSSI is a basis for Bluetooth positioning methods. For positioning, the correlation methods between distance and RSSI are applied to ensure real-time localization [
15], or the offline training data set is also used to develop the propagation model that is applied for further localization [
16].
With the release of Bluetooth 5.1, new enhanced approaches could be applied, such as angle of arrival detection that helps increase position accuracy. However, this requires higher investments in the equipment, e.g., a multi-antenna set, and also computation power for estimation of position.
In general, BLE is designed with the goal of minimizing power consumption and for very low power operation in an unlicensed frequency band. The general overview of BLE is given below in
Table 2 [
13].
BLE technology is characterized by relatively easy implementation and subsequent almost maintenance-free operation. It is an easy-to-implement solution and has a significant impact on indoor localization. Because a standardized Bluetooth protocol is used in this technology, support for end devices is very broad. Similarly, it is very likely that this standard will continue to be supported for new devices as well, as the use of the Bluetooth protocol spans many industries and is not just a location technology [
13].
This technology works on the principle of sending short messages to the vicinity of the transmitter in a similar way to a naval beacon illuminating its surroundings. The end device picks up this signal, which includes identifiers regarding the used data frame (iBeacon, Eddystone, etc.), for example, the MAC address of the transmitter or another tag to identify it; then the received signal strength (RSSI) can be evaluated, and thus, the distance between the receiver and the transmitter can be determined.
Since version 5.1, it is even possible to monitor, for example, the angle parameter at which the signal is received or transmitted, which allows one to determine not only the distance, but also the direction, which is crucial for indoor localization. However, for the purpose of determining the angle at which the beacon was detected, it is necessary to supplement the receiver with additional detection equipment such as an omnidirectional antenna, etc.
Even in lower versions of the standard, e.g., version 5.0, which is commonly used and available, it is possible to perform refinements of the position by using triangulation principles, interpolation, etc. Therefore, the suitability of the deployment is mainly dependent on the equipment of the end devices and the nature of the building or space for which this location-based approach is considered. Similarly, the location of the transmitters has a major influence, but so is the principle of localization, since BLE technology allows not only sending packets through the infrastructure after which the terminal device calculates its location based on the knowledge of the location of the transmitters on the infrastructure, but also the opposite principle, where the infrastructure only monitors the received communication and the terminal device sends packets, which allows the detection of this terminal device by the infrastructure. At the same time, these two basic approaches have different implementation complexity and implementation but the same back-end requirements. The Bluetooth standard enables the operation of a minimalistic solution or a very robust solution including cloud services, for example, enriched with additional supplementary or marketing information that can only be sent to the end device in the location/zone where the device is at that moment. However, these principles require additional requirements for communication interfaces, for example, the use of mobile networks. For localization in tunnels, these enhancements are not required.
2.3. Bluetooth Standard in Transportation
The Bluetooth standard is generally used in a wide range of fields including transportation, and BLE is one of the essential parts. Mainly, BLE is used for indoor localization for pedestrians, visitors of shopping centers. In terms of transport facilities, transport infrastructure, and transport users, a review of the literature is mentioned below.
The article presented by Thomas et al. [
18] refers to the proposal of a BLE based system architecture that supplements approaches to vehicular communication. The main objective was to adapt standardized messages to the BLE environment. The coverage was evaluated, and the conclusions were that the proposed protocol could be applied to ensure the spread of information to a wide range of users due to the availability of BLE compared to the standardized protocols.
The BLE standard can also be used for a ticketing system, as denoted by Narzt et al. [
19] with the case that Be-in/Be-out systems could be applicable in public means of transportation. During the evaluation, RSSI and the impact of shielding were also analyzed. This article is for this reason helpful and interesting in relation to the proposed localization approach. The future potential seems to be adoptable, e.g., in tolling systems in tunnels, that could be further analyzed within the future work.
Another approach using BLE signals is presented by Asiminidis et al. [
20] exactly in the tunnels. The authors refer to the idea that a BLE based system is cheap and easy to deploy. They denote that the system could be applied for the detection of people (devices). A similar approach is presented in the article by Baek [
21] focusing mainly on warnings and safety of workers inside the tunnel, for example, by using a BLE device placed on the workers’ helmets.
An even more related topic is presented by Araghi et al. in article [
22] that is a focused on determination of vehicle speed and, subsequently, travel time estimation in the tunnel by using BLE. The authors claim that this approach estimator can also be used to detect abnormal traffic situations. However, in this article, positioning was not solved.
Regarding this literature review, the topic of positioning in tunnels is crucial for safety aspects, and it is possible to fix it by using BLE technology that seems to be a novelty and can be realized in other tunnels to provide positioning data and thus information, e.g., not only from the national traffic information system, but also from a control system and other traffic detectors in tunnel, which could be disseminated to navigations and other smart traffic solutions including mobile applications, etc., in real time [
23].
3. Methodology of Application
This section is related to the design of the system, its architecture, and usage. Secondarily, the approach to localization is described, as well as recommendations that resulted from testing and installation in Czech tunnels.
3.1. Architecture Design
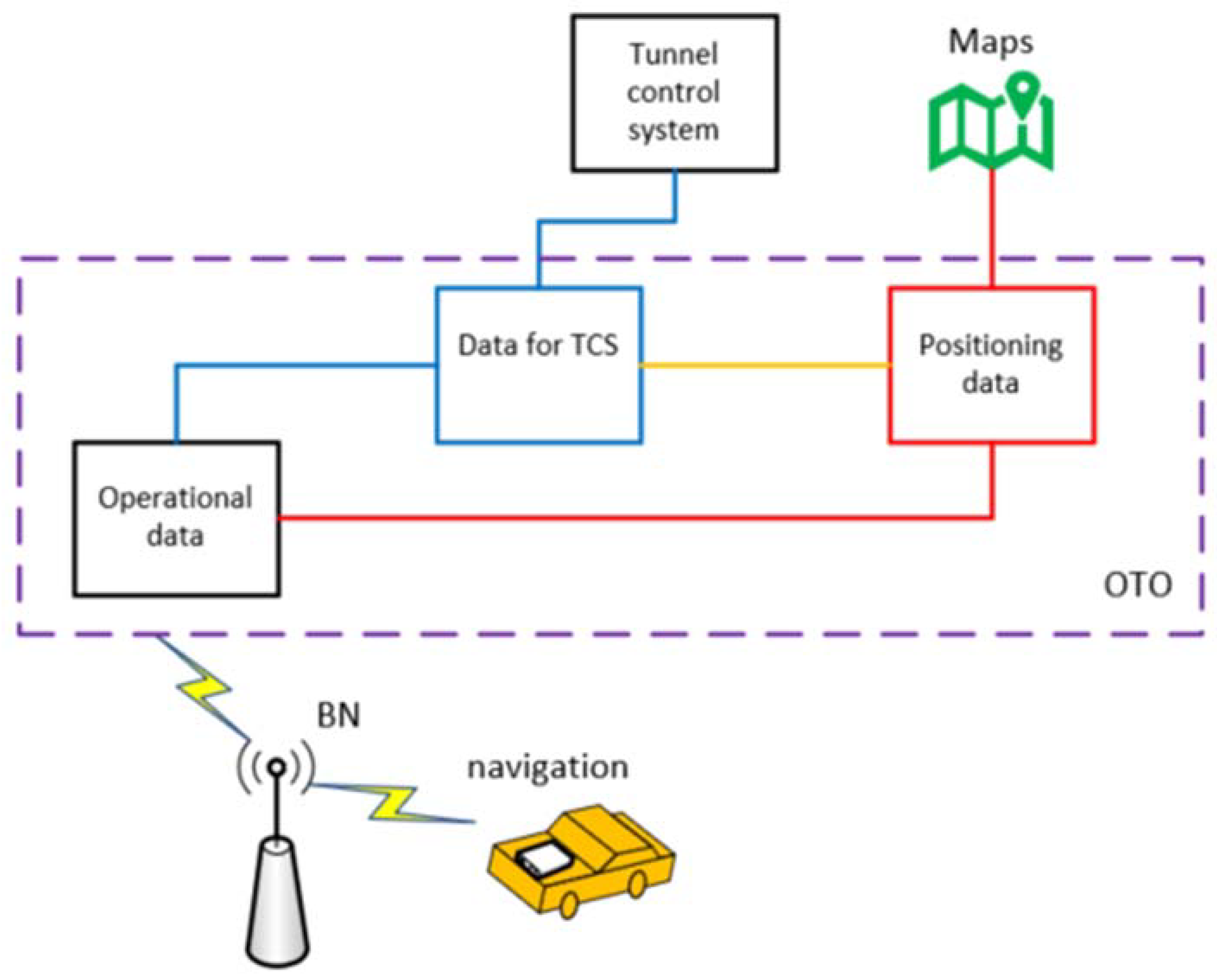
The system itself is properly working on BLE-based localization and simultaneously with the existing tunnel system that controls technological equipment placed in the tunnel such as camera, detectors, variable message signs, and many others. The beacons (BN) are installed throughout the tunnel and periodically transmit the packets for localization purposes. It is also connected to the data concentrator (DC) that provides integration of operational data directly to the tunnel control system and other applications for data analytics of operational technical objects (OTO) in the tunnel. The proposed schema is mentioned below in
Figure 1.
Once the BLE beacons are placed in the tunnel, the navigation is ready to use. However, the end client needs to know additional details that could be cached or stored in a cloud. When the client captures the packets, then each of them should be considered, analyzed, and compared with the reference values of the positions in the tunnel.
The process of integration and principles of vehicle navigation are mentioned in
Figure 2 below. It is also necessary to provide positioning data and its connections to the cloud, where map layouts are stored. Operational data can also be used for the tunnel control system.
3.2. Proximity Approach
The proximity approach is based on information about the detection of a given device (BLE transmitter). Theoretically, it is possible to proxy or estimate the distance of the terminal device from the transmitter by mathematical calculation based on the signal strength of the received message; however, this approach does not further allow one to determine, e.g., direction, etc. This use is mainly for advertisement purposes, where it is fully sufficient that the terminal device is close to the specific location where the BLE transmitter is implemented. For example, it can be used to inform users about special offers when visiting areas in a department store, presenting opportunities to explore more information about an exhibit to a museum visitor, or automatically logging into a restaurant reservation system when a customer arrives. Thus, these are primarily use cases that do not require centimeter-precise localization, but instead, it is fully sufficient that the end device is located near the so-called point of interest.
The same approach could also be used in tunnels if beacons are installed in the entire length of the tunnel. This is a relatively simple method to determine the actual position. The proximity approach checks captured BLE packets, and the position of the one with the highest RSSI (received signal strength indicator) is chosen as the current position at a given moment in time. The RSSI changes over time as the vehicle passes through the tunnel, and thus, the position is updated.
3.3. Installation and Recommendations
The infrastructure should be equipped with an appropriate number of beacons to provide sufficient coverage of the defined area and should take into account objects such as vehicles or installed equipment, as signal throughput through objects is very limited. Interference of the communication space must also be considered. The following sections describe the best practices that have already been tested in real operations.
To ensure that the beacon remains in place after installation, even if it is constantly subjected to the external influences described above, it is necessary to select suitable fixing aids. Most beacons are prepared and offered with the ability to attach them to the tunnel wall. A less invasive method is to use a combination of double-sided strong adhesive acrylic tape (e.g., 4950F), which is glued to the beacon on one side, and neoprene adhesive.
Based on testing, it was verified that the ideal place to install the beacons is the left side of the tunnel (where there are fewer splays: ramps, parking entrances, etc.). On ramps, beacons are installed with their backs facing the main tunnel tube (see
Figure 3). Several types of surfaces can be encountered on tunnel walls, most commonly concrete substrate or ceramic tile.
Regular spacing for navigation applications is essential, and, therefore, the uniform distance between beacons should be ensured. For the navigation of moving vehicles, it was determined that 40 m spacing is sufficient. However, this could be affected by individual aspects in each tunnel tube. It is also necessary to optimize the configurations of the BLE devices so that they transmit with sufficient strength and frequency. The strength is represented by the transmit power, which indicates the strength of the signal exactly one meter from the device. The beacon settings (transmit power and frequency interval) could affect the sustainability and life cycle of the whole solution. Some of the BLE equipment allows monitoring of battery life, or the beacon itself could transmits information about remaining battery voltage alongside identifiers, which could be used to determine the capacity level and help plan for possible replacement, so the prediction of the life cycle could be applied as in the articles [
10,
11] to the evaluation of the operating costs of the entire infrastructure and technological equipment in the building [
12]. The height at which the beacons are installed should be kept as uniform as possible throughout the length of the tunnel. Optimal height: 4–5 m (min. 3 m, max. 6 m). The distance between beacons depends on the intended use.
As mentioned above, regular spacing is crucial for positioning in the tunnel; an example of beacon placement in part of the Blanka tunnel complex is mentioned in
Figure 4 (red dots represent the beacons for testing). On the map, it is possible to see that the distance step is the same between all the beacons implemented in the tunnel. The spacing is 40 m in terms of the above-proposed recommendation.
At the same time, it is evident that care must be taken with the tunnel tube, and beacons also must cover the entry and exit ramps to ensure reliable positioning from all directions. The mentioned schema shows only one traffic flow leading from the southeast to the northwest direction.
4. Testing and Results
Based on the previous methodology for the application and installation of equipment, the selected outputs are widely discussed and mentioned in this chapter. The testing was carried out in situ, exactly in the part of the Blanka tunnel complex–Brusnice tunnel (city tunnel) and the Cholupice tunnel (highway tunnel).
First, the tests were carried out with the goal to test the system and its proper functionality; therefore, the measurements were analyzed only in the selected part of the tunnel to verify the configuration of the installed equipment and establish the optimal transmission power and transmission frequency.
The measurements were captured by a specifically developed mobile application exactly in the car that passed in a short section of the tunnel. This measurement was executed to fulfill the expected behavior of the end users and the application used during driving. Additionally, measurements were made to check whether the position correctly changed according to the presumption and position of the beacons implemented on the infrastructure in terms of predefined settings (transmission power and frequency). The result of these particular measurements is depicted in
Figure 5 below; each color represents the signal from an individual installed BLE device. This example was measured in the configuration where the transmit power is 5 dBm and the frequency interval is 100 ms.
The next measurement was performed while passing through the tunnel. The results are shown in
Figure 6 below; each color represents the signal of an individual installed beacon. The determined position is in accordance with the highest RSSI detected at the moment.
These measurements are also depicted in the map layout and compared with detected GNSS based signals in the Blanka tunnel complex. In
Figure 7 below, it is possible to observe specific cases where the GNSS was detected (green dot) compared to the determined BLE based position (blue dot). However, the GNSS based position is vaguely inaccurate practically throughout the entire length of the tunnel, while the BLE based solution provides sufficient positions as follows in these cases:
- (a)
The GNSS position was delayed and still showed the last position before the tunnel entrance;
- (b)
In the place where the tunnel exits are, the GNSS was detected but exactly in a different place/different tunnel exit;
- (c)
The vehicle was still in the tunnel close to the tunnel exit; however, the GNSS based position was out of the tunnel.
5. Discussion and Conclusions
Our aim is to define a solution based on the use of BLE devices in tunnels so that the position of a vehicle (or other device), including its speed, can be determined. This definition should describe the implementation procedure and the general methodology, including the proposals that lead to accurate location and speed determination in a tunnel as a place without GNSS signal coverage. The principles implied by the solution should be suitably validated so that the solution is replicable, or a general principle should be described on how to proceed with the implementation of such systems in tunnel structures, as well as how to test and operate such systems where appropriate.
At the same time, this approach also allows for improved accuracy by increasing the density of relatively inexpensive BLE equipment, enabling individual needs to be fulfilled according to the specifications of each tunnel or smart application.
One of the advantages is the support for the end device. BLE technology is inexpensive and widespread in mobile devices, but it is also possible to use single-purpose devices for localization, called tags. Furthermore, a very crucial advantage is that the beacon operational requirements are low, e.g., from a perspective of data transmission and energy consumption. This technology works on the principle of broadcast communication, and no special installation or implementation of HW modules or other tools is required to capture the beacon. For positioning or another use of BLE, a simple mobile app is sufficient.
Due to the low energy consumption, internal batteries can be used, and thus beacons can be placed practically anywhere, regardless of power supply lines in the building and in tunnels. Thus, the device can be positioned to suitably cover the space or be within the range of other devices for effective triangulation approaches.
The next advantage is the reliability of the proposed BLE solution with respect to the operational and maintenance costs. The beacons are installed in the tunnels with an estimated life cycle that is mainly affected by the life cycle of the battery. In terms of failure, this could be detectable by using other sensors, and it is possible to check whether the beacon is working or not during the regular tunnel closure, which is approximately twice a year. When one beacon is out of operation, it only affects the positioning precision in this specific section of the tunnel. The end device will be paired with another beacon that is the second closest, increasing the potential inaccuracy of positioning.
The proximity approach reliably determines the location of the terminal device if it knows, for example, the map documentation of the area. This is applicable in tunnels.
The application of BLE-based localization enables a wide range of technologies and smart solutions, and thus these benefits could be ensured:
Navigation to your destination;
Positioning;
Calculation of the optimal route;
Possibility of transmitting information related to the location (number of lanes, distance to turn);
Increasing the clarity of the situation, thus eliminating the risk of dangerous maneuvers, etc.;
Increasing traffic flow and safety;
Increasing efficiency in transport organization.
Furthermore, indirect impacts can also be affected or mitigated. These are, for example: unsafe maneuvers; inappropriate selection of tunnel exit due to lack of visibility and clarity of the situation with impacts on traffic outside the tunnel; creation of redundant traffic in cities; increase in congestion; lengthening of journeys, thus also environmental impacts; noise; etc.
This could also be used for the optimization of not only FCD data in tunnels, which could be improved for tunnel traffic and then further analyzed as Big Data and its application, as presented in [
24], but also the data enabling crisis management for the traffic control [
25] of surface transport infrastructure as well as that lying under it, i.e., in tunnels. Furthermore, navigation could be applicable for cargo securing and its economic impacts [
26], the priority of emergency vehicles, and many other cases discussed in [
27,
28] by enabling smart solutions and C-ITS, which require actual position updates.
Author Contributions
Conceptualization, J.B. and T.T.; methodology, J.B.; software, R.P.; validation, T.Š.; writing—original draft preparation, J.B.; visualization, T.T.; project administration, A.Š. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Technology Agency of the Czech Republic (grant number CK01000163) and the Department of Transport Telematics CTU in Prague, Faculty of Transportation Sciences (grant No. SGS22/121/OHK2/2T/16).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Data Availability Statement
Data are available from the authors after an official request.
Acknowledgments
The research was supported by the Technology Agency of the Czech Republic under the research project “Research of alternative methods of position determination and its integrity with GNSS for drivers using C-ITS” No. CK01000163, and this article was also supported by the Grant Agency of the Czech Technical University in Prague, grant No. SGS22/121/OHK2/2T/16, “Usage of BLE devices for determining the position and speed of the vehicle in the tunnel”.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Liu, Q.; Liang, P.; Xia, J.; Wang, T.; Song, M.; Xu, X.; Zhang, J.; Fan, Y.; Liu, L. A Highly Accurate Positioning Solution for C-V2X Systems. Sensors 2021, 21, 1175. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Groves, P.D.; Ziebart, M.K. Urban Positioning on a Smartphone: Real-Time Shadow Matching Using GNSS and 3D City Models; The Institute of Navigation: Manassas, VA, USA, 2013. [Google Scholar]
- Alam, N.; Kealy, A.; Dempster, A.G. Cooperative inertial navigation for GNSS-challenged vehicular environments. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1370–1379. [Google Scholar] [CrossRef]
- Kara, P.A.; Ognjanovic, I.; Maindorfer, I.; Mantas, J.; Wippelhauser, A.; Šendelj, R.; Laković, L.; Roganović, M.; Reich, C.; Simon, A.; et al. The Present and Future of a Digital Montenegro: Analysis of C-ITS, Agriculture, and Healthcare. Eng 2023, 4, 341–366. [Google Scholar] [CrossRef]
- Broz, J.; Tichy, T.; Angelakis, V.; Belinova, Z. Usage of V2X Applications in Road Tunnels. Appl. Sci. 2022, 12, 4624. [Google Scholar] [CrossRef]
- Nemec, D.; Hrubos, M.; Janota, A.; Pirnik, R.; Gregor, M. Estimation of the Speed from the Odometer Readings Using Optimized Curve-Fitting Filter. IEEE Sens. J. 2021, 21, 15687–15695. [Google Scholar] [CrossRef]
- Steinhoff, U.; Schiele, B. Dead reckoning from the pocket-an experimental study. In Proceedings of the 2010 IEEE International Conference on Pervasive Computing and Communications (PerCom), Mannheim, Germany, 29 March–2 April 2010; pp. 162–170. [Google Scholar]
- Quddus, M.A.; Ochieng, W.Y.; Noland, R.B. Current map-matching algorithms for transport applications: State-of-the art and future research directions. Transp. Res. Part C Emerg. Technol. 2007, 15, 312–328. [Google Scholar] [CrossRef] [Green Version]
- Jardak, N.; Samama, N. Indoor Positioning Based on GPS-Repeaters: Performance Enhancement using an Open Code Loop Architecture. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 347–359. [Google Scholar] [CrossRef]
- Tichý, T.; Brož, J.; Bělinová, Z.; Kouba, P. Predictive diagnostics usage for telematic systems maintenance. In Proceedings of the 2020 Smart City Symposium Prague (SCSP), Prague, Czech Republic, 25 June 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Tichý, T.; Brož, J.; Bělinová, Z.; Pirník, R. Analysis of Predictive Maintenance for Tunnel Systems. Sustainability 2021, 13, 3977. [Google Scholar] [CrossRef]
- Teichmann, M.; Szeligova, N.; Kuda, F. Evaluation of operating costs in the life cycle of buildings. In Advances and Trends in Engineering Sciences and Technologies III; CRC Press: Boca Raton, FL, USA, 2019; pp. 629–635. [Google Scholar]
- Bluetooth SIG, Inc. Available online: https://www.bluetooth.com/learn-about-bluetooth/tech-overview/ (accessed on 7 July 2022).
- Ji, M.; Kim, J.; Jeon, J.; Cho, Y. Analysis of positioning accuracy corresponding to the number of BLE beacons in indoor positioning system. In Proceedings of the 2015 17th International Conference on Advanced Communication Technology (ICACT), PyeongChang, Republic of Korea, 1–3 July 2015; pp. 92–95. [Google Scholar] [CrossRef]
- Shi, H. A new weighted centroid localization algorithm based on RSSI. In Proceedings of the 2012 IEEE International Conference on Information and Automation, Chengdu, China, 5–8 August 2012; pp. 137–141. [Google Scholar] [CrossRef]
- Jianyong, Z.; Haiyong, L.; Zili, C.; Zhaohui, L. RSSI based Bluetooth low energy indoor positioning. In Proceedings of the 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, Republic of Korea, 27–30 October 2014; pp. 526–533. [Google Scholar] [CrossRef]
- Kumbhar, A. Overview of ISM Bands and Software-Defined Radio Experimentation. Wirel. Pers. Commun. 2017, 97, 3743–3756. [Google Scholar] [CrossRef] [Green Version]
- Thomas, K.; Fouchal, H.; Cormier, S.; Rousseaux, F. C-ITS Communications based on BLE Messages. In Proceedings of the GLOBECOM 2020—2020 IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Narzt, W.; Mayerhofer, S.; Weichselbaum, O.; Haselböck, S.; Höfler, N. Be-in/be-out with bluetooth low energy: Implicit ticketing for public transportation systems. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Las Palmas, Spain, 15–18 September 2015; pp. 1551–1556. [Google Scholar]
- Asiminidis, C.; Kokkonis, G.; Kontogiannis, S. BLE Sniffing for Crowd Sensing and Directionality Scanning of Mobile Devices Inside Tunnels. In Proceedings of the 2020 3rd World Symposium on Communication Engineering (WSCE), Thessaloniki, Greece, 9–11 October 2020; pp. 54–58. [Google Scholar] [CrossRef]
- Baek, J.; Choi, Y. Bluetooth-Beacon-Based Underground Proximity Warning System for Preventing Collisions inside Tunnels. Appl. Sci. 2018, 8, 2271. [Google Scholar] [CrossRef] [Green Version]
- Namaki Araghi, B.; Skoven Pedersen, K.; Tørholm Christensen, L.; Krishnan, R.; Lahrmann, H. Accuracy of Travel Time Estimation Using Bluetooth Technology: Case Study Limfjord Tunnel Aalborg. Int. J. ITS Res. 2015, 13, 166–191. [Google Scholar] [CrossRef] [Green Version]
- Gavulová, A.; Pirník, R.; Hudec, R. Technical Support of Traffic Control System of Slovak Agglomerations in NaTIS Project. In Modern Transport Telematics; TST 2011. Communications in Computer and Information Science; Mikulski, J., Ed.; Springer: Berlin/Heidelberg, Germany, 2011; Volume 239. [Google Scholar] [CrossRef]
- Růžička, J.; Tichý, T.; Hajčiarová, E. Big Data Application for Urban Transport Solutions. In Proceedings of the 2022 Smart City Symposium Prague (SCSP), Prague, Czech Republic, 26–27 May 2022; pp. 1–7. [Google Scholar] [CrossRef]
- Růžička, J.; Navrátilová, K. Crisis management as the part of smart traffic control in cities. In Proceedings of the 2020 Smart City Symposium Prague (SCSP), Prague, Czech Republic, 25 June 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Vlkovsky, M.; Veselik, P.; Grzesica, D. Cargo Securing and its Economic Consequences. In Transport Means 2018—Proceedings of the 22nd International Scientific Conference Part I; Kaunas University of Technology: Kaunas, Lithuania, 2018; pp. 129–135. ISSN 1822-296X. [Google Scholar]
- Jerabek, M.; Broz, J. Use Cases for C-ITS Testing of Autonomous Vehicles. In Proceedings of the 5th EAI International Conference on Management of Manufacturing Systems, online, 27–29 October 2020; Springer Innovations in Communication and Computing. Springer: Cham, Switzerland, 2022; pp. 219–227. [Google Scholar]
- Hejazi, H.; Bokor, L. A Survey on the Use-Cases and Deployment Efforts Toward Converged Internet of Things (IoT) and Vehicle-to-Everything (V2X) Environments. Acta Technol. Jaurinensis 2021, 15, 58–73. [Google Scholar] [CrossRef]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}