
Flexural Wave Bandgaps in a Prestressed Multisupported Timoshenko Beam with Periodic Inerter-Based Dynamic Vibration Absorbers

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Prestressed Multisupported LR Beam with Attached IDVAs
2.1. Layout of the LR Beam
2.2. Calculation of the Band Structure
3. Bandgap Characteristics of the Prestressed Multisupported LR Beam with IDVAs
4. Parametric Bloch–Floquet Analysis
4.1. Effects of Mass Ratio
4.2. Effects of IDVA Stiffness
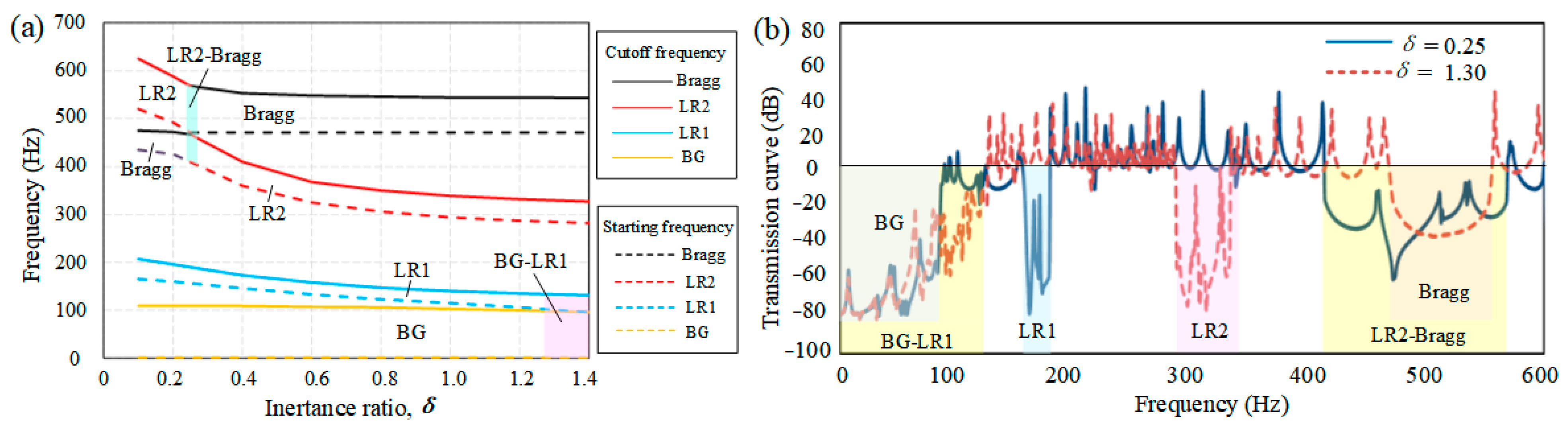
4.3. Effects of Inertance
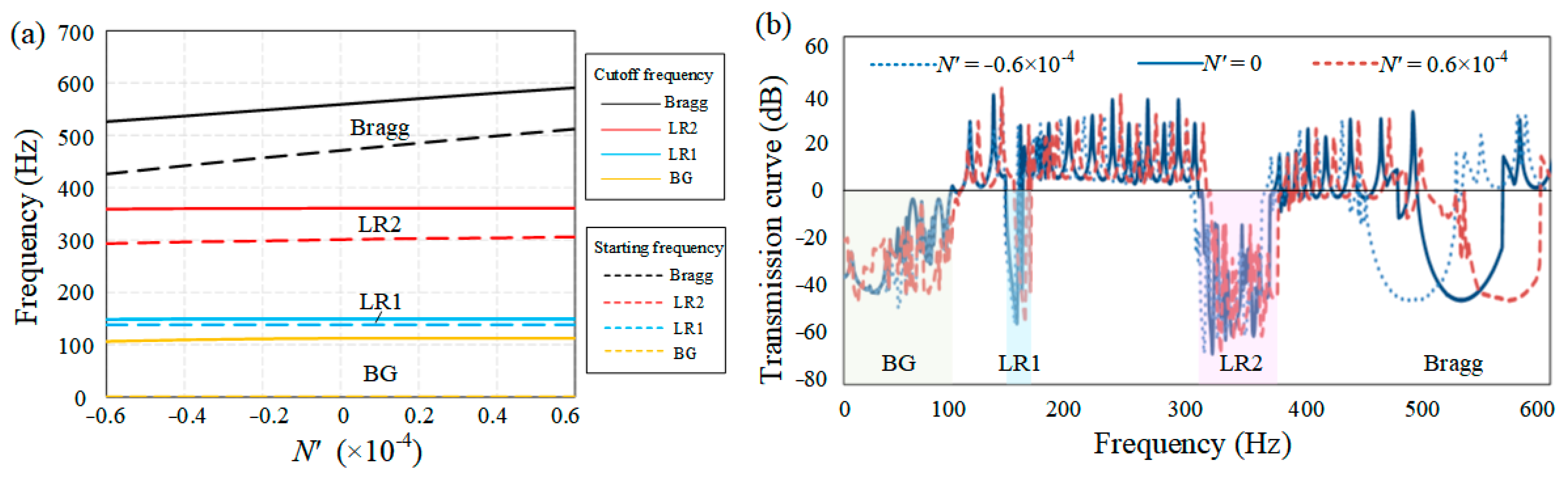
4.4. Effects of Axial Force
4.5. Effects of the Stiffness of the Vertical Elastic Supports
5. Conclusions
- (1)
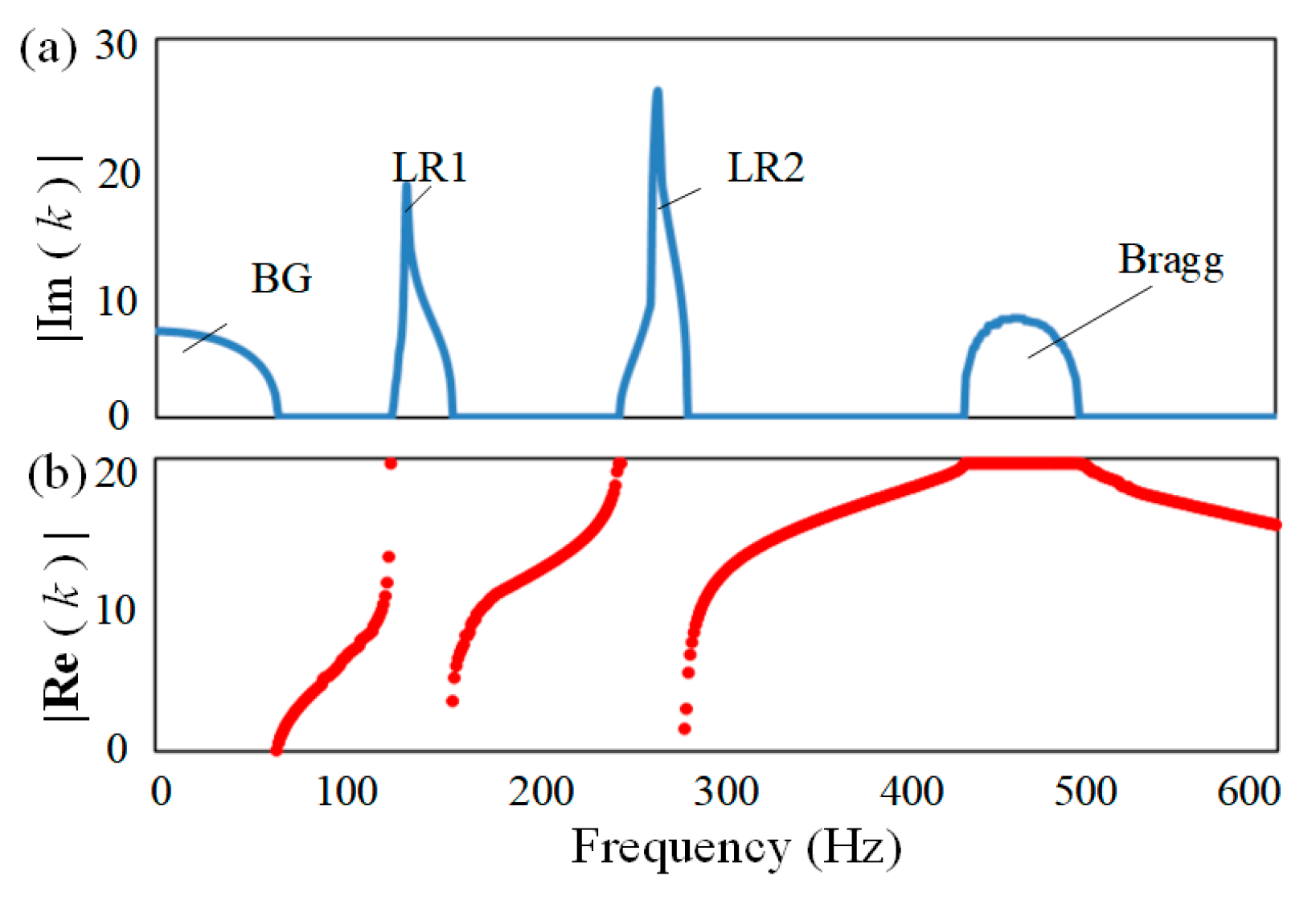
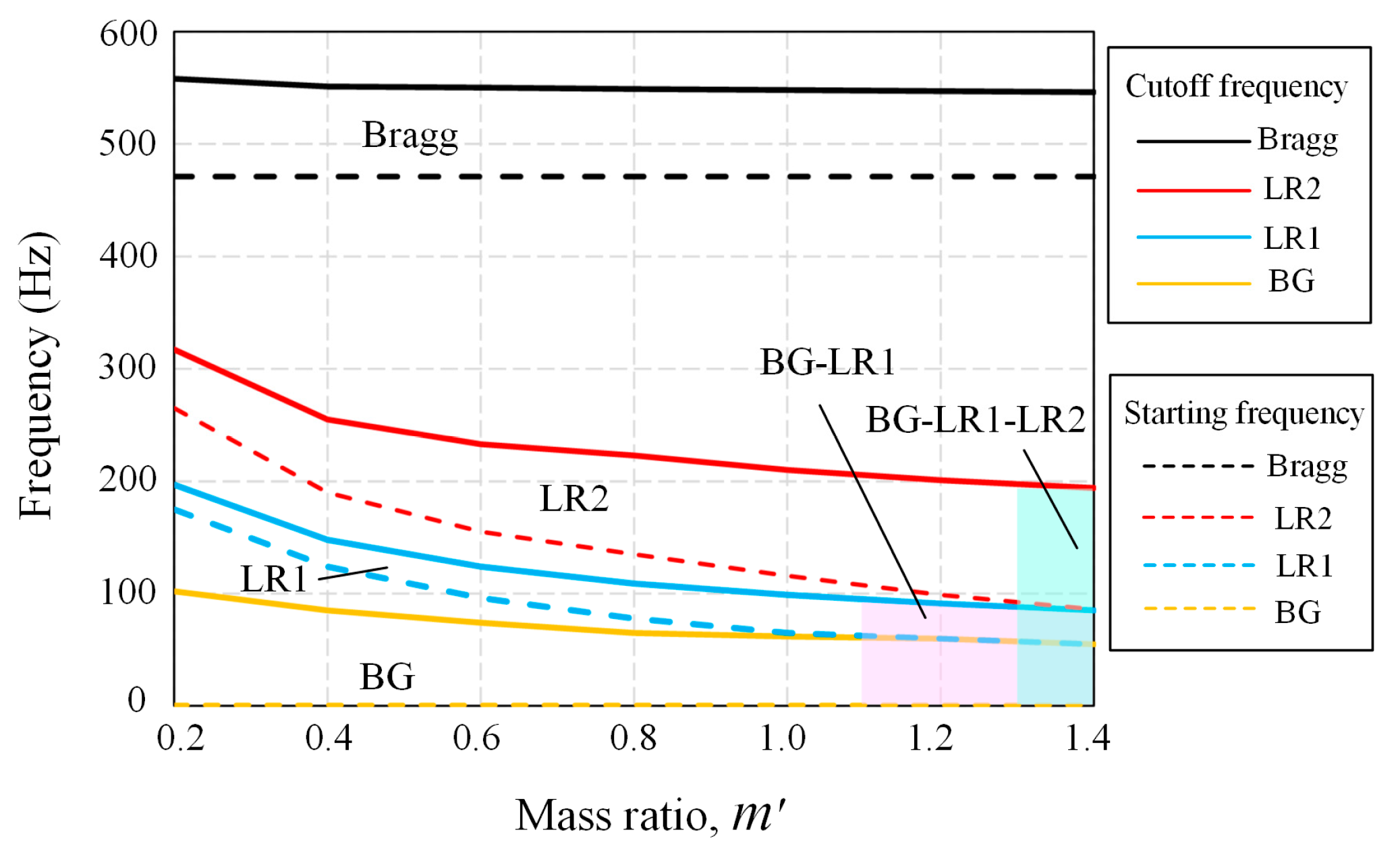
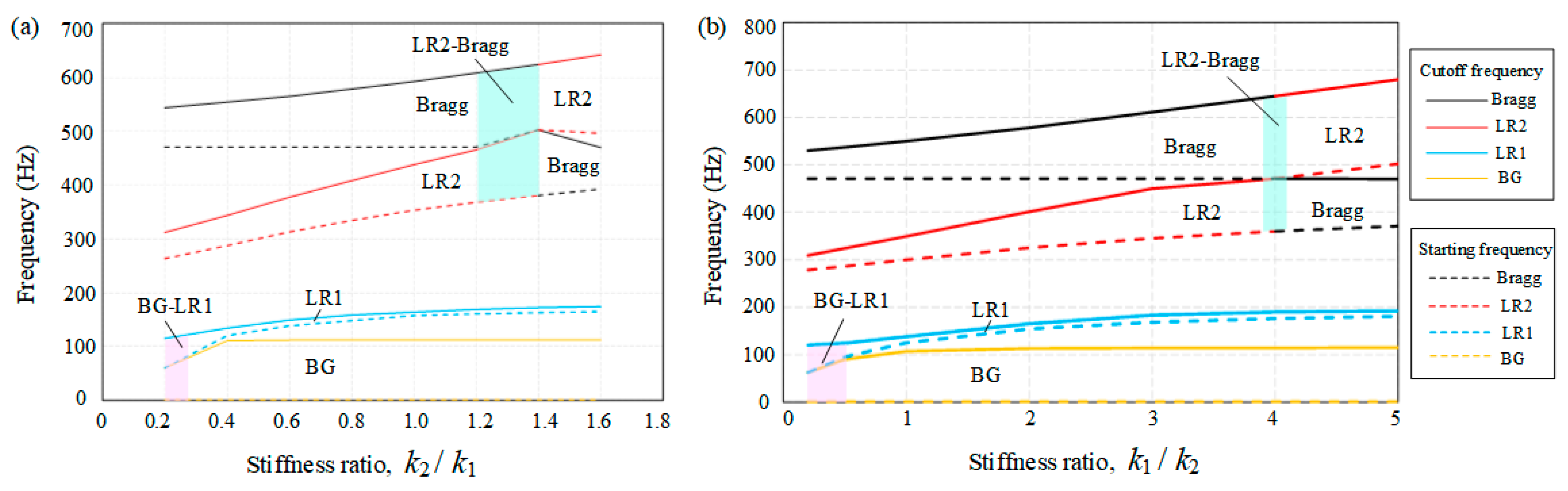
- The band spectrum of the LR beam was a combination of the BG, LR1, LR2, and Bragg bands in which the LR bands caused a relatively sharper wave attenuation than the BG and Bragg bands. The two LR bands were generated by the local resonance of the additional mass and inerter in the IDVA. Therefore, the LR bands moved toward a lower-frequency range as the additional mass and inertance increased and the spring stiffness decreased.
- (2)
- The Bragg band was determined through structural periodicity. The tensile (compressive) axial force applied to the LR beam was able to increase (decrease) the frequency range of the Bragg band, indicating that prestressing is a feasible way to tune the bandgap. The BG band located in the low-frequency zone depended on the stiffness of the vertical elastic supports, and the cutoff frequency of the BG band increased as the supports became more rigid.
- (3)
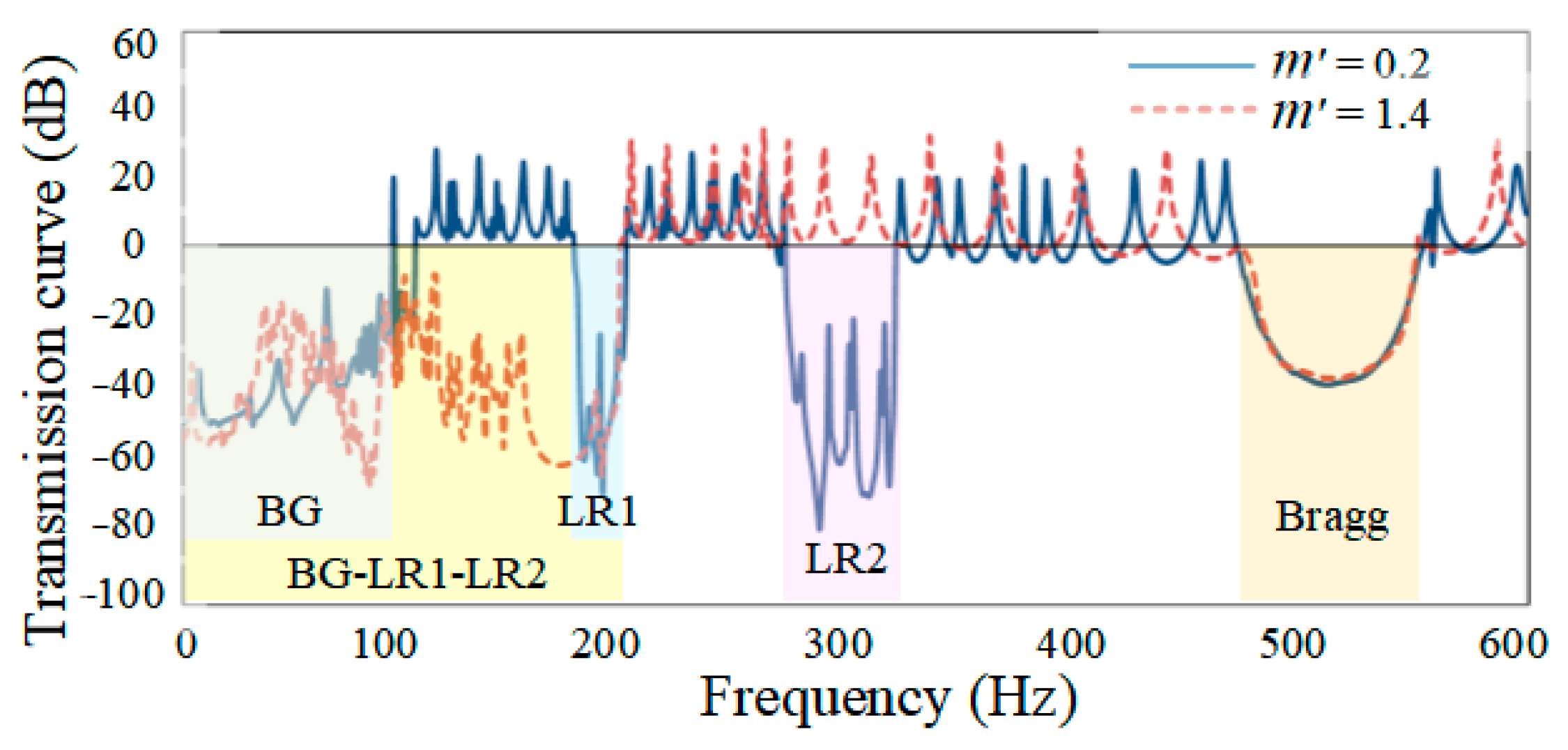
- Bandgap merging accompanied by edge frequency exchange occurred for a specific combination of LR beam parameters. The bandwidth of the merged bandgap was approximately equal to the sum of the bandwidths of the bandgaps involved, suggesting that a tunable broad bandgap can be achieved through bandgap splicing.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kushwaha, M.S.; Halevi, P.; Dobrzynski, L.; Djafari-Rouhani, B. Acoustic band structure of periodic elastic composites. Phys. Rev. Lett. 1993, 71, 2022–2025. [Google Scholar] [CrossRef] [PubMed]
- Sigalas, M.; Economou, E. Elastic and acoustic wave band structure. J. Sound Vib. 1992, 158, 377–382. [Google Scholar] [CrossRef]
- Li, J.; Chan, C.T. Double-negative acoustic metamaterial. Phys. Rev. E 2004, 70, 055602. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hussein, M.I.; Hulbert, G.M.; Scott, R.A. Dispersive elastodynamics of 1D banded materials and structures: Analysis. J. Sound Vib. 2006, 289, 779–806. [Google Scholar] [CrossRef] [Green Version]
- Mohammadi, S.; Eftekhar, A.; Khelif, A.; Moubchir, H.; Westafer, R.; Hunt, W.; Adibi, A. Complete phononic bandgaps and bandgap maps in two-dimensional silicon phononic crystal plates. Electron. Lett. 2007, 43, 898–899. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Liang, Z.; Zhu, J.; Xia, L.; Mondain-Monval, O.; Brunet, T.; Alù, A.; Li, J. Willis Metamaterial on a Structured Beam. Phys. Rev. X 2019, 9, 011040. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Chan, C.T.; Sheng, P. Three-component elastic wave band-gap material. Phys. Rev. B 2002, 65, 165116–1651166. [Google Scholar] [CrossRef] [Green Version]
- Yilmaz, C.; Hulbert, G.M.; Kikuchi, N. Phononic band gaps induced by inertial amplification in periodic media. Phys. Rev. B 2007, 76, 054309. [Google Scholar] [CrossRef]
- Yilmaz, C.; Hulbert, G. Theory of phononic gaps induced by inertial amplification in finite structures. Phys. Lett. A 2010, 374, 3576–3584. [Google Scholar] [CrossRef]
- Cremer, L.; Leilich, H.O. Zur theorie der biegekettenleiter. Arch. Elektr. Ubertragung 1953, 7, 261–270. [Google Scholar]
- Mead, D. Wave propagation and natural modes in periodic systems: II. Multi-coupled systems, with and without damping. J. Sound Vib. 1975, 40, 19–39. [Google Scholar] [CrossRef]
- Mead, D.M. Wave propagation in continuous periodic structures: Research contributions from Southampton, 1964–1995. J. Sound Vib. 1996, 190, 495–524. [Google Scholar] [CrossRef]
- Yu, D.; Liu, Y.; Wang, G.; Zhao, H.; Qiu, J. Flexural vibration band gaps in Timoshenko beams with locally resonant structures. J. Appl. Phys. 2006, 100, 124901. [Google Scholar] [CrossRef]
- Yu, D.; Liu, Y.; Zhao, H.; Wang, G.; Qiu, J. Flexural vibration band gaps in Euler-Bernoulli beams with locally resonant structures with two degrees of freedom. Phys. Rev. B 2006, 73, 064301. [Google Scholar] [CrossRef]
- Smith, M. Synthesis of mechanical networks: The inerter. IEEE Trans. Autom. Control 2002, 47, 1648–1662. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Liu, X.; Shan, Y.; Shen, Y.; He, T. Analysis and Optimization of the Novel Inerter-Based Dynamic Vibration Absorbers. IEEE Access 2018, 6, 33169–33182. [Google Scholar] [CrossRef]
- Jin, X.; Chen, M.Z.Q.; Huang, Z. Suppressing Random Response of a Regular Structure by an Inerter-Based Dynamic Vibration Absorber. J. Vib. Acoust. 2019, 141, 041004. [Google Scholar] [CrossRef]
- Hu, Y.; Chen, M.Z. Performance evaluation for inerter-based dynamic vibration absorbers. Int. J. Mech. Sci. 2015, 99, 297–307. [Google Scholar] [CrossRef] [Green Version]
- Shen, Y.; Chen, L.; Yang, X.; Shi, D.; Yang, J. Improved design of dynamic vibration absorber by using the inerter and its application in vehicle suspension. J. Sound Vib. 2016, 361, 148–158. [Google Scholar] [CrossRef]
- Pietrosanti, D.; De Angelis, M.; Giaralis, A. Experimental study and numerical modeling of nonlinear dynamic response of SDOF system equipped with tuned mass damper inerter (TMDI) tested on shaking table under harmonic excitation. Int. J. Mech. Sci. 2020, 184, 105762. [Google Scholar] [CrossRef]
- Chen, J.; Chen, M.Z.Q.; Hu, Y. Vortex-Induced Vibration Suppression of Bridges by Inerter-Based Dynamic Vibration Absorbers. Shock. Vib. 2021, 2021, 4431516. [Google Scholar] [CrossRef]
- Chen, M.Z.Q.; Li, Z.; Wang, H.; Hu, Y. Seismic response mitigation of a wind turbine via inerter-based structural control. Bull. Earthq. Eng. 2023, 21, 1361–1388. [Google Scholar] [CrossRef]
- Zhang, S.Y.; Neild, S.; Jiang, J.Z. Optimal design of a pair of vibration suppression devices for a multi-storey building. Struct. Control Health Monit. 2019, 27, e2498. [Google Scholar] [CrossRef]
- Zeighami, F.; Palermo, A.; Marzani, A. Inertial amplified resonators for tunable metasurfaces. Meccanica 2019, 54, 2053–2065. [Google Scholar] [CrossRef]
- Dong, Z.; Sheng, P. Inertial-Amplified Mechanical Resonators for the Mitigation of Ultralow-Frequency Vibrations. Phys. Rev. Appl. 2022, 18, 014027. [Google Scholar] [CrossRef]
- Fang, X.; Chuang, K.-C.; Jin, X.; Huang, Z. Band-Gap Properties of Elastic Metamaterials with Inerter-Based Dynamic Vibration Absorbers. J. Appl. Mech. 2018, 85, 071010. [Google Scholar] [CrossRef]
- Ge, Z.; Wang, W. Modeling, Testing, and Characteristic Analysis of a Planetary Flywheel Inerter. Shock. Vib. 2018, 2018, 2631539. [Google Scholar] [CrossRef] [Green Version]
- Smith, M.C.; Wang, F.-C. Performance Benefits in Passive Vehicle Suspensions Employing Inerters. Veh. Syst. Dyn. 2004, 42, 235–257. [Google Scholar] [CrossRef] [Green Version]
- Wang, F.-C.; Hong, M.-F.; Lin, T.-C. Designing and testing a hydraulic inerter. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2010, 225, 66–72. [Google Scholar] [CrossRef]
- Gei, M.; Movchan, A.B.; Bigoni, D. Band-gap shift and defect-induced annihilation in prestressed elastic structures. J. Appl. Phys. 2009, 105, 063507. [Google Scholar] [CrossRef] [Green Version]
- Nudehi, S.; Mukherjee, R.; Shaw, S. Active Vibration Control of a Flexible Beam Using a Buckling-Type End Force. J. Dyn. Syst. Meas. Control 2005, 128, 278–286. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, W.; Wan, S. Flexural Wave Bandgaps in a Prestressed Multisupported Timoshenko Beam with Periodic Inerter-Based Dynamic Vibration Absorbers. Sustainability 2023, 15, 3680. https://doi.org/10.3390/su15043680
Han W, Wan S. Flexural Wave Bandgaps in a Prestressed Multisupported Timoshenko Beam with Periodic Inerter-Based Dynamic Vibration Absorbers. Sustainability. 2023; 15(4):3680. https://doi.org/10.3390/su15043680
Chicago/Turabian StyleHan, Wenwen, and Shui Wan. 2023. "Flexural Wave Bandgaps in a Prestressed Multisupported Timoshenko Beam with Periodic Inerter-Based Dynamic Vibration Absorbers" Sustainability 15, no. 4: 3680. https://doi.org/10.3390/su15043680
APA StyleHan, W., & Wan, S. (2023). Flexural Wave Bandgaps in a Prestressed Multisupported Timoshenko Beam with Periodic Inerter-Based Dynamic Vibration Absorbers. Sustainability, 15(4), 3680. https://doi.org/10.3390/su15043680