1. Introduction
A low-voltage distribution station area (DSA) is an important component of a power system, one that is close to the margins of the grid and undertakes the task of supplying power to end-users from a medium-voltage distribution network. Whether its voltage is stable will directly affect the quality of life of users. At the present stage, most low-voltage DSAs are powered by a single power supply and a single line, with limited power supply capacity and low reliability. More recently, along with the large-scale access to distributed generations (DGs) and the widespread use of random loads such as electric vehicles, the problems of voltage violations and frequent fluctuations within the DSA and unbalanced load rates between areas have become increasingly serious due to the mismatch between power supply and load demand, which is not conducive to the consumption of renewable distributed generations [
1]. Some scholars have discussed the suppression of voltage fluctuation from the perspective of auxiliary service and energy storage. Refs. [
2,
3] points out that V2G technology can participate in auxiliary services to smooth the fluctuations of renewable energy generation and keep the voltage stable. The changes and propagation of vehicle battery in V2G technology are analyzed in [
2] and the model proposed in [
3] enhances the parameter access of a vehicle battery pack in V2G environment. Ref. [
4] discussed the application of energy storage technology to mitigate DG output fluctuations, and also analyzed the energy storage allocation strategy and mitigation strategy. Some researchers have also proposed that a flexible interconnection between DSAs is a potential scheme [
5]. The flexible interconnection of multiple DSAs can dynamically increase their capacity and alleviate the problems of voltage violations/ frequent fluctuations through the transferal of a part of a load or power supply to other DSAs. Therefore, the interconnection of multiple DSAs with complementary spatial and temporal load characteristics through flexible DC technology in low-voltage DSAs is of great significance when improving the level of a power supply. In recent years, a medium/low voltage flexible DC interconnection equipment—Soft Open Point (SOP)—has appeared [
6]. SOP is a fully controlled power electronic device which can be flexibly interconnected to DSAs to balance the load between areas and provide reactive power support [
7]. Therefore, SOP has been used in distribution systems to optimize power flow and suppress voltage fluctuations due to its excellent and continuous power regulation and its fast response. For the application of SOP in a distribution network, scholars have carried out relevant research on power trading and SOP operation control. Ref. [
8] proposes a non-cooperative game-based P2P trading method for a flexible interconnected distribution network based on SOP, which reduces the operation cost of the distribution network and improves the voltage profile. Ref. [
9] proposed a robust operation method of SOP to alleviate the voltage violation caused by PV output power fluctuation.
At present, there is much research on SOP control schemes, and the main control strategies of SOP are centralized control [
10,
11,
12], decentralized control [
13,
14,
15], a combined centralized control and local control [
16], or a combination of decentralized control and local control [
17]. For the centralized control strategy, it is necessary to obtain the topology of the entire distribution network and the global electrical information for optimization, which brings great communication burden and requires high reliability of the communication system, and the number of decision variables in the adopted optimization model is large, which leads to a slow model solution speed that cannot realize real-time control. Compared with centralized control, the decentralized control strategy puts less stress on communication by partitioning the distribution network and exchanging only electrical information on the area boundaries, but it is still difficult to achieve real-time voltage control and it is still necessary to ensure that all of the node information in the network can be measured and accessed in real time [
18]. As for centralized or decentralized control combined with local control, the local control part uses a
Q-
V curve to determine the reactive power provided by the SOP for different voltage fluctuations at different moments, which is determined by the results of centralized or decentralized optimization over longer time scales [
19]. Meanwhile, the active power transmitted by SOP in a control cycle does not change with voltage fluctuations, and the real-time voltage fluctuations in the distribution network are compensated only by the reactive power provided by the SOP. Therefore, in the control strategy of the centralized control or the decentralized control combined with local control, although the problem of real-time voltage fluctuation suppression is solved to a certain extent, the adjustment of the
Q-
V curve still relies on the global information of the distribution network or local information in the region, which is not a complete local control and is not convenient for realizing aplug-and-play SOP. In addition, in the medium or low voltage distribution network, the line resistance is not negligible. In the case of large
r/
x, the change of active power transmitted by the line will also cause significant voltage fluctuation. Therefore, the control schemes which suppress the voltage fluctuations in real time using only reactive power cannot take advantage of the fact that the active power transmitted by SOP can also be quickly adjusted in real time.
As discussed above, current SOP-based centralized or decentralized control strategies need to obtain information about all nodes in the distribution network, which usually requires global communication and can cause a great communication burden. These control strategies will not be effective when there is a global communication failure or it is not available. The motivation of this paper is to propose a local control strategy as an alternative to the centralized/decentralized control based on global information in case of communication failure or for achieving a plug-and-play SOP without global communication conditions.
The main potential of the proposed control strategy can be elucidated in two points:
- (1)
The control strategy is based on the local information of the SOP for voltage regulation, which can greatly reduce communication burden as there is no need for global communication.
- (2)
Due to the small number of decision variables and constraints in the local control optimization model, the model can be solved very fast. Therefore, the corresponding speed of voltage regulation is fast, and the real-time performance is good.
The rest of this paper is organized as follows.
Section 2 analyzes the principle of voltage regulation in flexible interconnected DSAs and describes the implementation of the proposed local control strategy,
Section 3 simulates and verifies the strategy, and
Section 4 concludes the whole paper.
2. Method
2.1. Topology of Flexible Interconnected Distribution Station Areas
A typical topology for the flexible interconnection of low-voltage DSAs is shown in
Figure 1. Before adopting SOP for flexible interconnection, different DSAs can only supply power to the load through their own distribution transformers, and this single power supply method makes it difficult to meet the increasing demand for power capacity and reliability. In addition, when the load or the output of photovoltaic and wind power in the DSA changes, the line voltage will also fluctuate frequently and even exceed the limits. While SOP allows flexible interconnection between different low-voltage DSAs which can achieve inter-area energy flow. Based on this topology, when the load power within a DSA is high or the power of distributed generations exceeds the load demand, the power can be exchanged with other station areas through the flexible DC interconnector, which realizes dynamic adjustment of the capacity of the DSA. In addition, regulating power flow in different DSAs through SOP can effectively alleviate the problem of voltage violation or frequent fluctuation, and is beneficial to improving the consumption capacity of distributed generations.
2.2. Voltage Regulation Principle Based on Voltage-Power Sensitivity
Unlike the transmission network, the feeder impedance ratio
r/
x is larger in the distribution network, so not only does the transmission of reactive power on the line have an impact on the node voltage, but the active power transmitted on the line also has a significant impact on the node voltage [
20]. Based on this attribute, we decided to use SOP to quickly and simultaneously adjust active and reactive power so as to achieve rapid suppression of voltage fluctuation. In this paper, we used the sensitivity relationship between the active/reactive power injected into the node and the node voltage to analyze the effect of the active/reactive power on the voltage. Since low-voltage DSAs mostly use single the transformer and single line power supply method, its model can be equated to a one-terminal power supply feeder model with multiple nodes [
5]. As shown in
Figure 2, consider a low-voltage DSA with
n nodes, where node 0 represents the slack node; define the load of the
i-th node as
PL,i +
jQL,i, and the output power of the distributed generator (DG) connected to the
i-th node as
PDG,i +
jQDG,i (
i = 1, 2, ...,
n), so the power injected to the
i-th node is
Si = (
PDG,i −
PL,i) +
j(
QDG,i −
QL,i); the impedance between the
i-th node and the (
i − 1)-th node is
Zi =
Ri +
jXi; and the voltage of the
i-th node is
Ui.
In the low-voltage DSA shown in
Figure 2, The voltage difference between node
i and the slack node caused by the power injected at node
m is shown in Equation (1):
When the power injected at node
m is perturbed by ∆
Pm +
j∆
Qm, the fluctuation of voltage difference ∆
Uim is shown in Equation (2):
Substituting the line impedance
Zi =
Ri +
jXi into Equation (2) gives:
Ignoring the imaginary part of the fluctuation of voltage difference, define
SPim as the sensitivity coefficient of the voltage at node
i relative to the active power injected at node m and
SQim as the sensitivity coefficient of the voltage at node
i relative to the reactive power injected at node m.
SPim and
SQim can be expressed respectively as
From Equation (4), it is clear that the sensitivity of the voltage at node i to the active/reactive power injected at node m depends on the line impedance. Therefore, in a distribution network with a large line impedance ratio r/x, both the active and reactive power injected at the node will cause a significant effect on the node voltage. Therefore, SOP can be used to regulate the voltage in DSA by transmitting active power between DSAs as well as providing reactive power.
From Equation (4), the sensitivity coefficient of the voltage of node
i relative to the active/ reactive power injected at node
i is:
Assuming that a port of the SOP is connected to node
i, after obtaining
SPVi/
SQVi, the voltage at node
i can be accurately adjusted by injecting active/reactive power into it through the SOP. The formula for voltage regulation is shown in Equation (6):
where
Ui0 is the voltage at the
i-th node before regulation, and ∆
Pi/∆
Qi is the variation of the injected active/reactive power at the
i-th node.
We propose to connect the SOP to the end node of the DSA so that the voltage at the end node can be accurately regulated according to Equation (6). This is done for the following reasons: the voltage deviation at the end node of the line is usually the largest, as shown in
Figure 3; and the sensitivity coefficient derived from Equation (4) shows that the voltage at the end node of the line is most affected by the variation of the injected power at the remaining nodes.
When the power transmitted on the line changes, then the closer to the end of the line, the greater the voltage deviation. Therefore, in the DSAs with radial topology, when we can ensure that the voltage deviation at the end node is small, the voltage deviation of other nodes is usually acceptable.
2.3. Local Control Strategy for Voltage Fluctuation Suppression Based on Soft Open Point
The local control strategy proposed in this paper is to regulate the output power of the SOP without relying on communication and relying instead only on local information at the point of common coupling (PCC) between the SOP and the DSA, so that the node voltage is as close to the rated value as possible. As mentioned above, since both the active and reactive powers injected by the SOP into the node significantly affect the node voltage, the voltage control strategy needs to consider both the active and reactive power provided by the SOP, thus introducing an optimization problem to determine the reference value of active/reactive power.
In general, consider a scenario wherein there is a flexible interconnection of
n DSAs as shown in
Figure 4. Define the voltage RMS value at the
i-th PCC node at the current moment as
Ui0 (
i = 1, 2, ...,
n), the voltage–active power sensitivity coefficient at the
i-th PCC node as
SPVi, the voltage–reactive power sensitivity coefficient at the
i-th PCC node as
SQVi, the power injected by SOP into the
i-th PCC node as
Pi0 + j
Qi0, and the rated voltage at the
i-th DSA as
UNi.
Based on the voltage value at the PCC at the current moment, a voltage local control optimization model is proposed with the objective of minimizing the difference between the actual value of the PCC voltage and the rated voltage after adjusting the SOP output power, and the objective function is shown in Equation (7):
The ∆
Ui in Equation (7) represents the difference between the voltage of the
i-th PCC node and the rated voltage after adjusting the output power of the
i-th port of the SOP, which can be expressed as shown in Equation (8):
The ∆PSOP,i and ∆QSOP,i represent the active and reactive output power adjustments of the i-th port of SOP, respectively.
This optimization model needs to consider the active power conservation constraint and the capacity constraints of each port of SOP as shown in Equation (9).
where the
S is the capacity of SOP.
As we can see, this model composed of Equations (7)–(11) is a quadratic constraint quadratic programming (QCQP), which can be solved using commercial software such as Gurobi. The model can be solved to obtain the adjustment of the output power ∆
PSOP,i and ∆
QSOP,i of the
i-th port of the SOP, so the active/reactive power reference value for the
i-th port of SOP (
Prefi + j
Qrefi) can be obtained as shown in Equation (12):
As shown in Equations (7)–(12), the proposed local control strategy can achieve voltage control based only on local information such as the voltage at the PCC and the output power of the SOP. We can also find that the optimization model contains only a few decision variables. Taking the SOP with n ports as an example, the number of decision variables involved in the model is only 3n and the number of constraints is only 3n + 1, so that the model can be solved quickly and the real-time performance of the voltage control can be guaranteed.
Based on the optimization model, the voltage control process of the proposed local control strategy is shown in
Figure 5.
We set a control period during SOP operation, running the optimization model once per period and regulating the voltage once based on the model results. Then the same process is repeated after entering the next control period. As shown in
Figure 5, a disturbance occurs at
t0 causing voltage deviation, entering the control period at
t1,
t1~
t2 solve the optimization model for SOP output power reference value
Pref,i/
Qref,i, and
t2~
t3 is the transient process of SOP adjusting the output power based on
Pref,i/
Qref,i. As can be seen, the total time required to regulate the voltage is
t0~
t3. Due to the solution time of the model and the very short transient response time of the SOP (
t1~
t3), the control period can be set to be very short. Thus, the time period (
t0~
t1) from voltage deviation occurring to entering the next control period can be very short. Therefore, when the control period is set very short, it takes a short time from the occurrence of the voltage deviation to its elimination. The whole process of the voltage adjustment can be described by the pseudocode shown in Algorithm 1.
| Algorithm 1: Local control |
| Input: U0, PSOP,0, QSOP,0, UN, n |
Output: Pref, Qref
% n is the amount of SOP’s ports, a constant. U0, UN, PSOP,0, QSOP,0, Pref and Qref are n-dimension vectors. |
| 1 for i from 1 to n do |
| 2 Calculate the total resistance from the slack node to the node connected to port i of SOP: |
| 3 |
| 4 Calculate the total reactance from the slack node to the node connected to port i of SOP: |
| 5 |
| 6 end for |
| % Lines 1 to 6 are the initialization steps for calculating the sensitivity. |
| 7 Repeat the following procedure once per control period: |
| 8 Establish a optimization model: |
| 9 obj.: min |
| 10 s. t.: |
| 11 |
| 12 for i from 1 to n do |
| 13 |
| 14 |
| 15 |
| 16 end for |
| 17 slove the optimization model to obtain: and |
| 18 for i from 1 to n do |
| 19 |
| 20 |
| 21 end for |
| 22 Return Pref and Qref |
3. Simulation Verification
To verify the effectiveness of the proposed local control strategy, a simulation case of flexible interconnection of two DSAs is designed as shown in
Figure 6, with the parameters shown in
Table 1.
As shown in
Figure 6, two photovoltaic devices are connected in DSA1 at node 2 and node 3, one photovoltaic device is connected in DSA2 at node 6, and there is no DG in DSA3. The photovoltaic output power is shown in the
Figure 7.
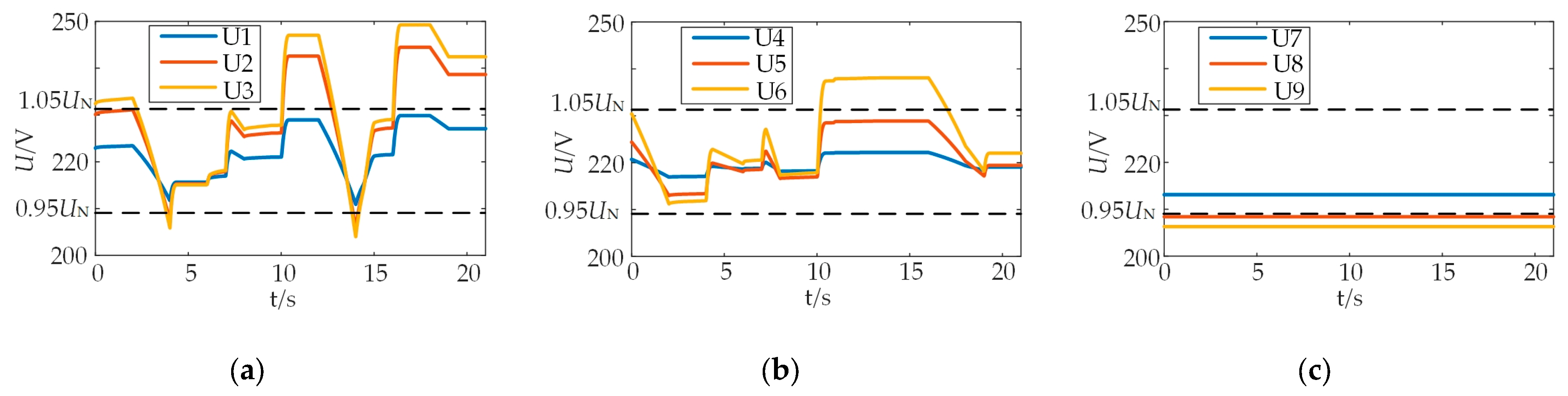
The node voltages in 3 DSAs without flexible interconnection are shown in
Figure 8.
As can be seen from
Figure 8, with the fluctuation of PV output power, the node voltage in DSAs will also fluctuate and even violate the upper limit when the PV’s output power is too large. In DSA3 where there is no DG, the voltage at nodes 9 and 10 near the end of the transmission line is below 0.95
UN.
When these three DSAs are flexibly interconnected through SOP, with the local control strategy proposed in this paper enabled, the node voltages in the three DSAs are shown in
Figure 9.
The local control strategy is enabled when the simulation proceeds to 1 s. Comparing
Figure 8 with
Figure 9, it can be seen that the voltage deviations at nodes 3, 6, and 9 are quickly eliminated after enabling the control, and the voltage deviations at the remaining nodes within the DSAs are also greatly reduced. As the simulation progresses, the control strategy is able to respond quickly to keep the voltage in the DSAs around the rated voltage, despite the fluctuating PV output in DAS1 and DSA2. Therefore, the effectiveness of the proposed local control strategy is verified.
It can also be seen that, though the PV output power sometimes changes greatly in a short time, the control strategy can eliminate the voltage deviation after a short transient process. Similarly, when the PV output power changes slowly, the control strategy can ensure that the voltage is near the rated value without transient process.
In terms of real-time performance for the above simulation case, the time consumed to solve the local control optimization model on a MATLAB 2022a simulation platform (CPU: i5-12500H, RAM: 16 GB) is around 0.01 s. It is evident that the proposed local control strategy can respond to voltage fluctuations and adjust the output power of each SOP port in a very short time to achieve the purpose of real-time voltage fluctuation suppression. The simulation results also verify this.
However, it should also be noted that, since only the local information of SOP ports is used to regulate the output power of SOP, compared with the centralized and decentralized control strategies, the proposed local control strategy may not achieve the globally optimal solution to keep the voltage profile of the whole distribution network optimal. However, since it has no requirement for communication, this control strategy can be used as an alternative to the centralized control strategy in case of communication failure or as a control strategy in plug-and-play SOP scenarios. In order to compare the proposed control strategy with the current mainstream technique, the comparison between the local control and centralized/decentralized control is made as shown in the
Table 2.
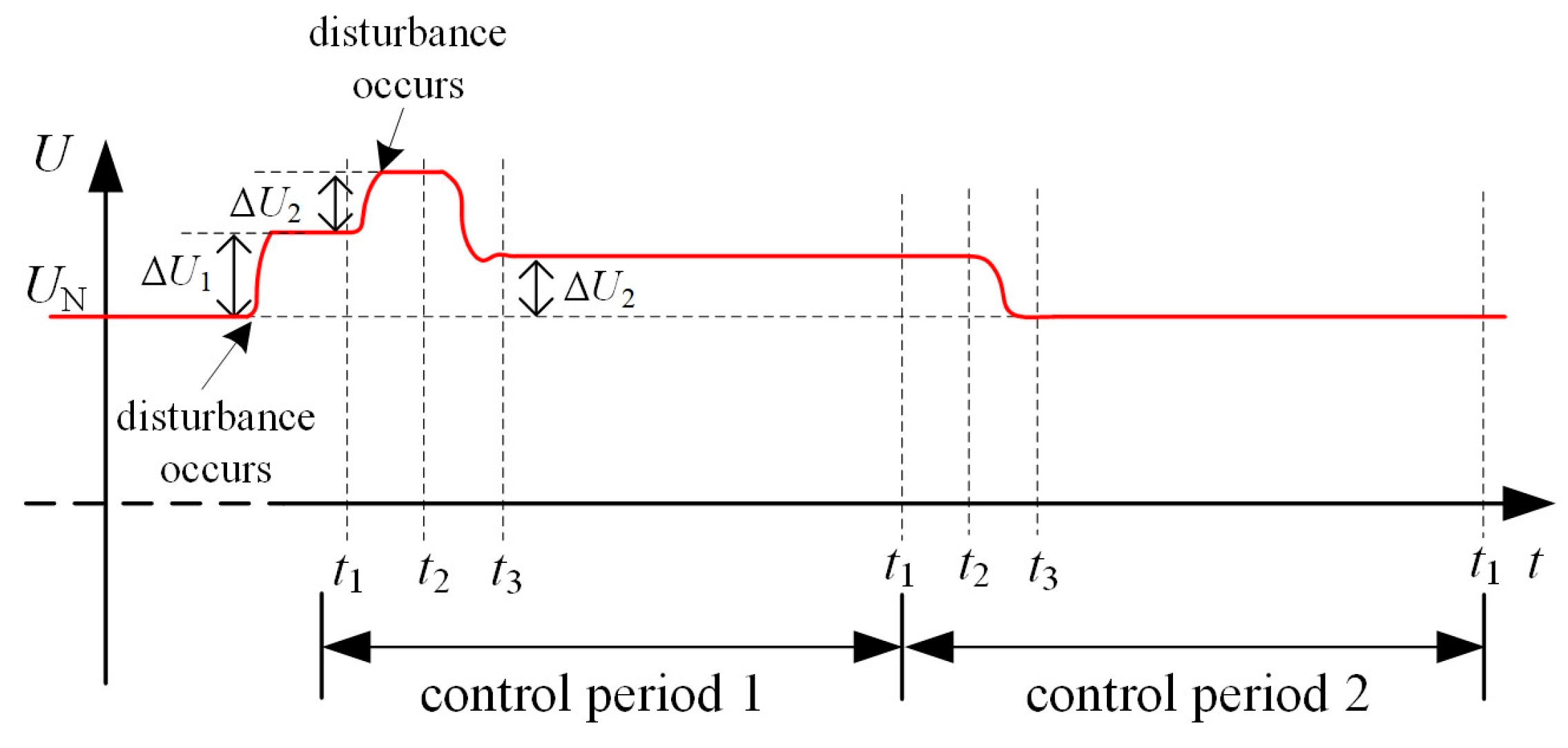
As for the control deviation, this is caused by the calculation error of the sensitivity coefficient that derives from our decision to ignore the imaginary part of the voltage deviation amount in Equation (3) while we derived Equation (4) of the sensitivity coefficient from Equation (3). This part of the deviation depends on the line impedance and the amount of power adjustment injected into the node, but is usually negligible and does not cause significant deviations. Meanwhile, the regulation of the voltage magnitude depends almost exclusively on the real part of Equation (3) so that, therefore, the control deviation caused by the ignored imaginary part can be ignored. On the other hand, as shown in
Figure 10, it is possible that the node load or renewable energy output may change significantly during the time period t1~t3 for solving the optimization model and adjusting the SOP output power, which may then still result in a large voltage deviation after adjustment in period 1, but the deviation will be eliminated after entering the next control period. Due to the very fast solving speed of the model and the SOP’s fast response, the control period can be set to be very short, so that such control deviations can be solved quickly and without long term effects.
4. Conclusions
In this paper, a local control strategy for voltage regulation based on an SOP is proposed to cope with the frequent voltage fluctuations/violations in a DSA. In DSAs with a radial topology, we propose to use SOPs to flexibly interconnect the end nodes of multiple DSAs. When the capacity of the SOP is sufficient, the proposed control strategy can quickly respond to voltage fluctuations and reduce the node voltage deviation in the DSAs without depending on communication, which is the innovation of this work. Compared with centralized or decentralized control, the local control strategy relies only on local information, such as the output power of the SOP and the voltage at the PCC, to adjust the output power of the SOP. This incurs lower communication requirements and can improve the plug-and-play availability of the SOP. Similarly, in terms of real-time performance, the response speed of local control is much improved.
Although this local control strategy cannot guarantee the optimal voltage of all nodes in the DSA, it achieves a good voltage control effect without relying on communication and node information other than the nodes connected by SOP. In future work, we will explore a method for achieving a globally optimal voltage profile in a network based on SOP using local information or a small amount of information in the key nodes.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}