
A Robust Model Predictive Control for a Photovoltaic Pumping System Subject to Actuator Saturation Nonlinearity
 , ,
, , 
Abstract
:1. Introduction
2. Problem Formulation
3. Robust Model-Based Predictive Control Using LMIs
4. Main Results
4.1. Linear Systems Subject to Actuator Saturation
4.2. Nonlinear Systems Subject to Actuator Saturation
5. Illustrative Results
5.1. Example 1
5.2. Example 2. DC–DC Buck-Converter-Based PV Pumping System
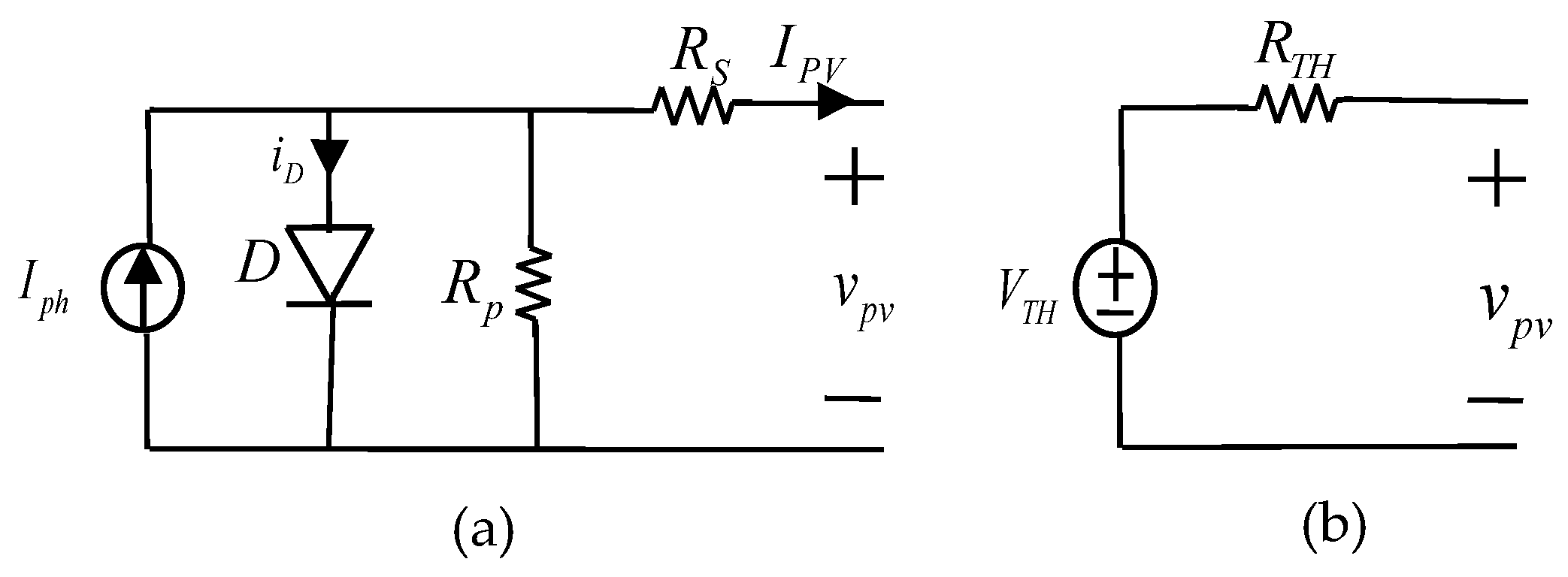
5.2.1. PVG Model
5.2.2. DC Motor-Pump Model
5.2.3. Buck Converter Model
5.2.4. Uncertainty Polytope Model
5.2.5. Simulations Results
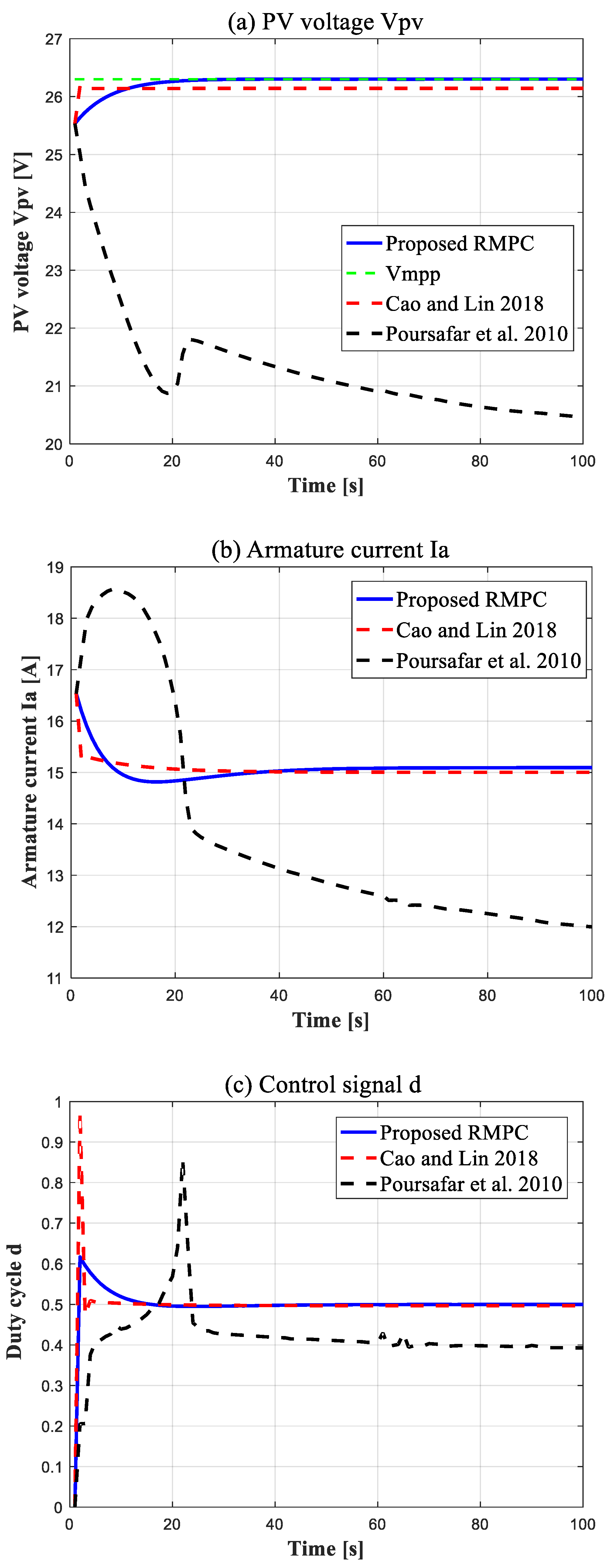
- Scenario 1: The input saturation effectIn the first case, we assume that the saturation limit is , and the initial conditions of the DC–DC buck converter during startup are represented by . We use the nominal value of the dynamic resistance to test the closed-loop behavior without any change in the converter parameters. Figure 9 depicts the computed input and state responses under the three different designs, where the waveforms are the PV voltage , armature current , and duty cycle . From Figure 9, it can be discovered that the proposed method outperforms the saturated RMPC algorithm in Cao and Lin [43] with a fairly good time response and lower fluctuations. Moreover, the PV voltage response settles to its desired value without any overshoot, whereas the approach in [55] has some unstable transient responses. In other words, our RMPC is well capable of handling the hard actuator saturation constraint.
- Scenario 2: The insolation variations effectIn the second case, we assume that the saturation limit is . An examination is made for various irradiances, such as , , and. With the proposed control method, the power regulation response is shown in Figure 10. The increasing and decreasing nature of PV power with respect to insolation can be observed in the waveforms of PV power, which verifies the PV generator voltage at the MPP tracking. Similarly, the proposed RMPC also shows a good time response, low oscillation, and desired stability.
- Scenario 3: The temperature variations effectIn this scenario, we consider varying temperature with constant insolation . The temperature changes between and at . Next, the temperature increases to at , and it returns to at , For this scenario, the saturation limit is . Figure 11 depicts the computed state responses under the proposed RMPC design. It is easily seen that the proposed RMPC guarantees the desired stability, with a good time response and low oscillation.
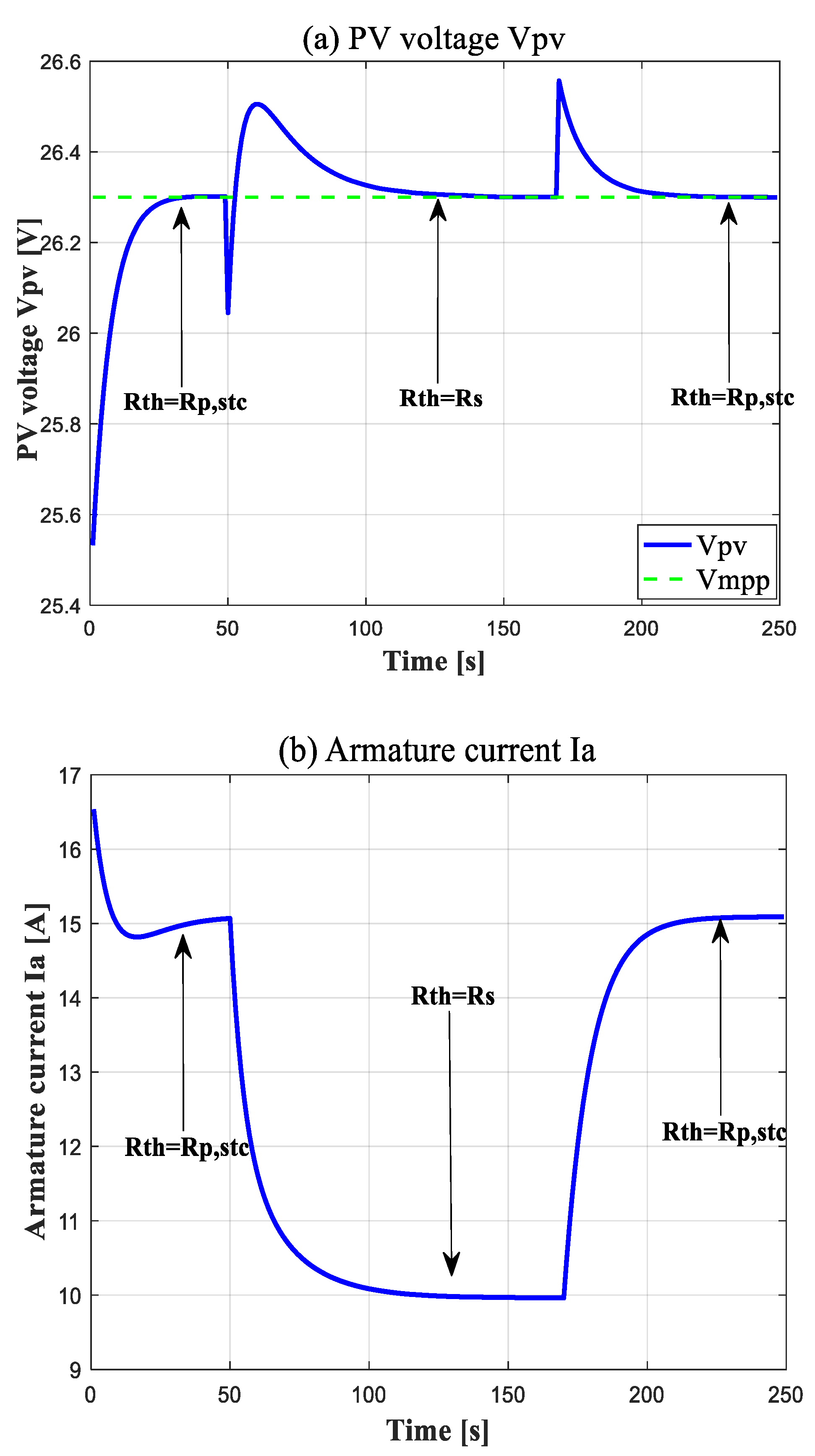
- Scenario 4: The dynamic resistance variations effectIn the last case, we consider dynamic resistance uncertainty in order to validate the robustness of the proposed controller. Figure 12 illustrates that our controller can stabilize the system on the reference PV voltage in presence of an abrupt dynamic resistance change. The overshoots and long settling time at and are the results of the aggressive move in the converter parameters, which demonstrates the effectiveness of our MPC design algorithm.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Abbreviations | |
| MPC | model predictive controller |
| RMPC | robust model predictive controller |
| DC | direct current |
| DC–DC | direct current–direct current |
| PV | photovoltaic |
| PVG | photovoltaic generator |
| LMI | linear matrix inequality |
| H2O2 | hydrogen peroxide |
| CO2 | carbon dioxide |
| MPP | maximum power point |
| MPPT | maximum power point tracker |
| P&O | perturb and observe |
| INC | incremental conductance |
| STC | standard test condition |
| PID | proportional–integral–derivative |
| SMC | sliding mode control |
| LPV | linear parameter varying |
| CNC | computer numerical control |
| AMB | active magnetic bearing |
| CCM | continuous conduction mode |
| PWM | pulse width modulation |
| Symbols | |
| x∈ | state |
| control input | |
| saturation function of control input | |
| current time instant | |
| control input limit | |
| maximum control input limit | |
| nonlinear function of states and control inputs | |
| uncertain parameter | |
| convex hull | |
| globally Lipschitz | |
| Lipschitz constant matrix | |
| I | identity matrix |
| H | state feedback gain |
| dead-zone nonlinearity function | |
| J | worst-case performance function |
| positive definite state weight | |
| positive definite control weight | |
| quadratic Lyapunov function | |
| positive scalar | |
| output current of PV generator, in ampere | |
| output voltage of PV generator, in volt | |
| photo-current of the PV generator | |
| reverse saturation current | |
| short-circuit current | |
| short-circuit current temperature coefficient | |
| cell short-circuit current at STC | |
| open-circuit voltage at STC | |
| open-circuit voltage temperature coefficient | |
| reverse saturation current | |
| shunt resistance, in ohm | |
| series resistance, in ohm | |
| junction thermal voltage | |
| ideality factor of the PV cell | |
| electron charge, in coulomb | |
| recombination losses current | |
| Thévenin equivalent voltage, in volt | |
| Thévenin resistance, in ohm | |
| counter electromotive force | |
| DC motor armature current, in ampere | |
| DC motor armature voltage, in volt | |
| armature resistance, in ohm | |
| armature inductance, in henry | |
| diode | |
| converter duty cycle | |
| capacitance, in farad | |
| binary signal | |
| witching period, in second | |
| sawtooth signal | |
| perturbed values of state | |
| perturbed values of input | |
| voltage at MPP, in volt | |
| current at MPP, in ampere | |
| MPP from the manufacturer datasheet, in watt | |
| shunt resistance at SRC, in ohm | |
| PVG temperature, in degrees Kelvin | |
| PVG temperature reference, in degrees Kelvin |
Appendix A. Proof of Theorem 2
References
- Cui, W.; Li, X.; Li, X.; Si, T.; Lu, L.; Ma, T.; Wang, Q. Thermal performance of modified melamine foam/graphene/paraffin wax composite phase change materials for solar-thermal energy conversion and storage. J. Clean. Prod. 2022, 367, 133031. [Google Scholar] [CrossRef]
- Joshi, S.; Karamta, M.; Pandya, B. Small scale wind & solar photovoltaic energy conversion system for DC microgrid applications. Mater. Today Proc. 2022, 62, 7092–7097. [Google Scholar]
- Mura, P.G.; Baccoli, R.; Innamorati, R.; Mariotti, S. Solar energy system in a small town constituted of a network of photovoltaic collectors to produce Electricity for homes and hydrogen for transport services of municipality. Energy Procedia 2015, 78, 824–829. [Google Scholar] [CrossRef] [Green Version]
- Mura, P.G.; Baccoli, R.; Innamorati, R.; Mariotti, S. An energy autonomous house equipped with a solar PV hydrogen conversion system. Energy Procedia 2015, 78, 1998–2003. [Google Scholar] [CrossRef] [Green Version]
- Alvear-Daza, J.J.; Sanabria, J.; Gutiérrez-Zapata, H.M.; Rengifo-Herrera, J.A. An integrated drinking water production system to remove chemical and microbiological pollution from natural groundwater by a coupled prototype helio-photochemical/H2O2/rapid sand filtration/chlorination powered by photovoltaic cell. Sol. Energy 2018, 176, 581–588. [Google Scholar] [CrossRef]
- Ren, F.-R.; Tian, Z.; Liu, J.; Shen, Y.-T. Analysis of CO2 emission reduction contribution and efficiency of China’s solar photovoltaic industry: Based on Input-output perspective. Energy 2020, 199, 117493. [Google Scholar] [CrossRef]
- Siddiqui, O.; Ishaq, H.; Chehade, G.; Dincer, I. Experimental investigation of an integrated solar powered clean hydrogen to ammonia synthesis system. Appl. Therm. Eng. 2020, 176, 115443. [Google Scholar] [CrossRef]
- Maranhao, G.N.; Brito, A.U.; Pinho, J.T.; Fonseca, J.K.S.; Leal, A.M.; Macedo, W.N. Experimental Results of a Fuzzy Controlled Variable-Speed Drive for Photovoltaic Pumping Systems. IEEE Sens. J. 2016, 16, 2854–2864. [Google Scholar] [CrossRef]
- Ghosh, A.; Malla, S.G.; Bhende, C.N. Small-signal modelling and control of photovoltaic based water pumping system. ISA Trans. 2015, 57, 382–389. [Google Scholar] [CrossRef]
- Mishra, A.K.; Singh, B. Solar photovoltaic array dependent dual output converter based water pumping using Switched Reluctance Motor drive. IEEE Trans. Ind. Appl. 2017, 53, 5615–5623. [Google Scholar] [CrossRef]
- Rajan, K.; Bhim, S. Single Stage Solar PV Fed Brushless DC Motor Driven Water Pump. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 1377–1385. [Google Scholar]
- Kolhe, M.; Joshi, J.; Kothari, D. Performance Analysis of a Directly Coupled Photovoltaic Water-Pumping System. IEEE Trans. Energy Convers. 2004, 19, 613–618. [Google Scholar] [CrossRef]
- Elgendy, M.A.; Zahawi, B.; Atkinson, D.J. Comparison of Directly Connected and Constant Voltage Controlled Photovoltaic Pumping Systems. IEEE Trans. Energy Convers. 2010, 1, 184–192. [Google Scholar] [CrossRef]
- Elgendy, M.A.; Zahawi, B.; Atkinson, D.J. Assessment of Perturb and Observe MPPT Algorithm Implementation Techniques for PV Pumping Applications. IEEE Trans. Energy Convers. 2012, 3, 21–33. [Google Scholar] [CrossRef]
- Sitbon, M.; Schacham, S.; Kuperman, A. Disturbance Observer Based Voltage Regulation of Current-Mode-Boost-Converter-Interfaced Photovoltaic Generator. IEEE Trans. Ind. Electron. 2015, 62, 5776–5785. [Google Scholar] [CrossRef]
- Salas, V.; Barrado, A. Review of the maximum power point tracking algorithms for stand-alone photovoltaic systems. Sol. Energy Mater. Sol. Cells 2006, 90, 1555–1578. [Google Scholar] [CrossRef]
- Femia, N.; Petrone, G.; Spagnuolo, G.; Vitelli, M. Optimization of perturb and observe maximum power point tracking method. IEEE Trans. Power Electron. 2005, 20, 963–973. [Google Scholar] [CrossRef]
- Zegaoui, A.; Aillerie, M.; Petit, P.; Sawicki, J.P.; Jaafar, A.; Salame, C.; Charles, J.P. Comparison of two common maximum power point trackers by simulating of PV generators. Energy Proc. 2011, 6, 678–687. [Google Scholar] [CrossRef]
- Kadri, R.; Gaubert, J.; Champenois, G. An improved maximum power point tracking for photovoltaic grid-connected inverter based on voltage oriented control. IEEE Trans. Ind. Electron. 2011, 58, 66–75. [Google Scholar] [CrossRef]
- Leppaaho, J.; Huusari, J.; Nousiainen, L.; Puukko, J.; Suntio, T. Dynamic properties and stability assessment of current fed converters in photovoltaic applications. IEEE Trans. Ind. Appl. 2011, 131, 976–984. [Google Scholar] [CrossRef]
- Suntio, T.; Viinamaki, J.; Jokipii, J.; Messo, T.; Kuperman, A. Dynamic characterization of power electronics interfaces. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 949–961. [Google Scholar] [CrossRef]
- Middlebrook, R.D.; Cuk, S. A general unified approach to modelling switching-converters. Int. J. Electron. 1977, 42, 521–550. [Google Scholar] [CrossRef]
- Perry, A.G.; Feng, G.; Liu, Y.F.; Sen, P.C. A design method for PI-like fuzzy logic controllers for DC–DC converter. IEEE Trans. Ind. Electron. 2007, 54, 2688–2696. [Google Scholar] [CrossRef]
- Shirazi, M.; Zane, R.; Maksimovic, D. An Autotuning Digital Controller for DC–DC Power Converters Based on Online Frequency-Response Measurement. IEEE Trans. Power Electron. 2009, 24, 2578–2588. [Google Scholar] [CrossRef]
- Olalla, C.; Queinnec, I.; Leyva, R.; El Aroudi, A. Robust optimal control of bilinear DC-DC converters. Control. Eng. Pract. 2011, 19, 688–699. [Google Scholar] [CrossRef]
- Emadi, A.; Khaligh, A.; Rivetta, C.; Williamson, G. Constant power loads and negative impedance instability in automotive systems: Definition, modeling, stability, and control of power electronic converters and motor drives. IEEE Trans. Veh. 2006, 55, 1112–1125. [Google Scholar] [CrossRef]
- Li, X.; Wen, H.; Hu, Y.; Jiang, L. A novel beta parameter based fuzzy-logic controller for photovoltaic MPPT application. Renew. Energy 2019, 130, 416–427. [Google Scholar] [CrossRef]
- Youssefa, A.; El Telbanya, M.; Zekry, A. Reconfigurable generic FPGA implementation of fuzzy logic controller for MPPT of PV systems. Renew. Sustain. Energy Rev. 2018, 82, 1313–1319. [Google Scholar] [CrossRef]
- Chan, C.-Y.; Chincholkar, S.H.; Zekry, W. Adaptive Current-Mode Control of a High Step-Up DC-DC Converter. IEEE Trans. Power Electron. 2017, 32, 7297–7305. [Google Scholar] [CrossRef]
- Zheng, S.; Li, W. Adaptive control for switched nonlinear systems with coupled input nonlinearities and state constraints. Inf. Sci. 2018, 462, 331–356. [Google Scholar] [CrossRef]
- Yu, J.; Chen, B.; Yu, H.; Lin, C.; Zhao, L. Neural networks-based command filtering control of nonlinear systems with uncertain disturbance. Inf. Sci. 2018, 426, 50–60. [Google Scholar] [CrossRef]
- Tian, Z.; Lyu, Z.; Wang, C. UDE-based sliding mode control of DC–DC power converters with uncertainties. Inf. Sci. 2019, 83, 116–128. [Google Scholar] [CrossRef]
- Jinbo, L.; Wenlong, M. A new experimental study of input-output feedback linearization based control of boost type DC/DC converter. In Proceedings of the IEEE International Conference on Industrial Technology, Via del Mar, Chile, 14–17 March 2010; pp. 685–689. [Google Scholar]
- Ghaffari, V.; Vahid Naghavi, S.; Safavi, A.A. Robust model predictive control of a class of uncertain nonlinear systems with application to typical CSTR problems. Proc. Am. Control. Conf. 2013, 23, 493–499. [Google Scholar] [CrossRef]
- Bououden, S.; Allouani, F.; Abboudi, A.; Chadli, M.; Boulkaibet, I.; Al Barakeh, Z.; Neji, B.; Ghandour, R. Observer-Based Robust Fault Predictive Control for Wind Turbine Time-Delay Systems with Sensor and Actuator Faults. Energies 2023, 16, 858. [Google Scholar] [CrossRef]
- Qin, S.J.; Badgwell, T.A. A survey of industrial model predictive control technology. Control Eng. Pract. 2003, 11, 733–764. [Google Scholar] [CrossRef]
- Kothare, M.V.; Balakrishnan, V.; Morari, M. Robust Constrained Model Predictive Control Using Linear Matrix Inequalities. Automatica 1996, 32, 1361–1379. [Google Scholar] [CrossRef] [Green Version]
- Casavola, A.; Giannelli, M.; Mosca, E. Min–max predictive control strategies for input-saturated polytopic uncertain systems. Automatica 2000, 36, 125–133. [Google Scholar] [CrossRef]
- Angeli, D.; Casavola, A.; Franzč, G.; Mosca, E. An ellip soidal off-line MPC scheme for uncertain polytopic discrete-time systems. Automatica 2008, 44, 3113–3119. [Google Scholar] [CrossRef]
- Cheng, X.; Jia, D. Robust stability constrained model predictive control. In Proceedings of the American Control Conference, Boston, MA, USA, 30 June–2 July 2004; pp. 1580–1585. [Google Scholar]
- Alamo, T.; Cepeda, A.; Limon, D.; Camacho, E.F. Estimation of the domain of attraction for saturated discrete-time systems’. Int. J. Syst. Sci. 2010, 37, 575–583. [Google Scholar] [CrossRef]
- Hu, T.; Lin, Z. Control systems with actuator saturation: Analysis and design. In Birkhäuser, 1st ed.; Springer: Boston, MA, USA, 2001; pp. 327–373. [Google Scholar]
- Cao, Y.Y.; Lin, Z. Min–max MPC algorithm for LPV systems subject to input saturation. IEE Proc. Control. Theory Appl. 2018, 152, 266–272. [Google Scholar] [CrossRef]
- Huang, H.; Li, D.; Lin, Z.; Xi, Y. An improved robust model predictive control design in the presence of actuator saturation. Automatica 2011, 47, 861–864. [Google Scholar] [CrossRef]
- Zabiri, H.; Samyudia, Y. A hybrid formulation and design of model predictive control for systems under actuator saturation and backlash. J. Process Control. 2006, 16, 693–709. [Google Scholar] [CrossRef]
- Besselmann, T.; Lofberg, J.; Morari, M. Explicit MPC for LPV Systems: Stability and Optimality. IEEE Trans. Autom. Control 2012, 57, 2322–2332. [Google Scholar] [CrossRef] [Green Version]
- Yu, S.; Bohm, C.; Chen, H.; Allgower, F. Stabilizing model predictive control for LPV systems subject to constraints with parameter-dependent control law. In Proceedings of the 2009 Conference on American Control Conference, St. Louis, MO, USA, 10–12 June 2009; pp. 3118–3123. [Google Scholar]
- Zhang, L.; Wang, J.; Li, C. Distributed model predictive control for polytopic uncertain systems subject to actuator saturation. J. Process Control 2013, 23, 1075–1089. [Google Scholar] [CrossRef]
- Guo, M.; Wang, D. Guidance law for low-lift skip reentry subject to control saturation based on nonlinear predictive control. Aerosp. Sci. Technol. 2014, 37, 48–54. [Google Scholar]
- Weiwei, Q.; Bing, H.; Gang, L.; Pengtao, Z. Robust model predictive tracking control of hypersonic vehicles in the presence of actuator constraints and input delays. J. Frankl. Inst. 2016, 353, 4351–4367. [Google Scholar] [CrossRef]
- Peng, H.; Li, F.; Zhang, S.; Chen, B. A novel fast model predictive control with actuator saturation for large-scale structures. Comput. Struct. 2017, 187, 35–49. [Google Scholar] [CrossRef] [Green Version]
- Yu, S.; Qu, T.; Xu, F.; Chen, H.; Hu, Y. Stability of finite horizon model predictive control with incremental input constraints. Automatica 2017, 79, 265–272. [Google Scholar] [CrossRef]
- Galuppini, G.; Magni, L.; Martino Raimondo, D. Model predictive control of systems with dead zone and saturation. Control Eng. Pract. 2018, 78, 56–64. [Google Scholar] [CrossRef]
- Li, X.; Sun, G.; Shao, X. Discrete-time pure-tension sliding mode predictive control for the deployment of space tethered satellite with input saturation. Acta Astronaut. 2020, 170, 521–529. [Google Scholar] [CrossRef]
- Poursafar, N.; Taghirad, H.D.; Haeri, M. Model predictive control of non-linear discrete time systems: A linear matrix inequality approach. IET Control Theory Appl. 2010, 4, 1922–1932. [Google Scholar] [CrossRef]
- Sun, L.; Wangn, Y.; Feng, G. Control design for a class of affine nonlinear descriptor systems with actuator saturation. IEEE Trans. Autom. Control 2015, 60, 2195–2200. [Google Scholar] [CrossRef]
- Boyd, S.; El Ghaoui, L.; Feron, E.; Balakrishnan, V. Linear matrix inequalities in systems and control theory. In Studies in Applied and Numerical Mathematics; SIAM: Philadelphia, PA, USA, 1994; Volume 1562, pp. 5776–5785. [Google Scholar]
- Lu, Y.; Arkun, Y. A quasi-min-max MPC algorithms for linear parameter varying systems with bounded rate of change of parameters. In Proceedings of the 2000 American Control Conference. ACC, Chicago, IL, USA, 28–30 June 2000; Volume 5, pp. 3234–3238. [Google Scholar]
- Izadian, A.; Pourtaherian, A.; Motahari, S. Basic Model and Governing Equation of Solar Cells used in Power and Control Applications. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15–20 September 2012; pp. 1483–1488. [Google Scholar]
- Ortiz-Conde, A.; Lugo-Munoz, D.; Garcia-Sanchez, J. An explicit Multi exponential Model as an Alternative to Traditional Solar Cell Models with Series and Shunt Resistances. IEEE J. Photovolt. 2012, 2, 261–268. [Google Scholar] [CrossRef]
- Villalva, M.G.; Gazoli, J.R.; Filho, E.R. Comprehensive Approach to Modeling and Simulation of Photovoltaic Arrays. IEEE Trans. Power Electron. 2009, 24, 1198–1208. [Google Scholar] [CrossRef]
- Gomes da Silva, J.; Tarbouriech, S. Anti-windup design with guaranteed regions of stability: An lmi-based approach. IEEE Trans. 2005, 50, 106–111. [Google Scholar]
- Nakanishi, F.; Ikegami, T.; Ebihara, K.; Kuriyama, S.; Shiota, Y. Modeling and Operation of a 10 kW Photovoltaic Power Generator Using Equivalent Electric Circuit Method. In Proceedings of the IEEE Photovoltaic Specialists Conference, Anchorage, AK, USA, 15–22 September 2000; 2000. [Google Scholar]
- Tian, H.; Mancilla-David, F.; Ellis, K.; Muljadi, E.; Jenkins, P. A cell-to-module-to-array detailed model for photovoltaic panels. Sol. Energy 2012, 86, 2695–2706. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Description | Numerical Value |
|---|---|---|
| L | Inductance | 1 mH |
| C | Input capacitance | 1000 µF |
| Va | Armature voltage | 13.5 V |
| Ia | Armature current | 15.22 A |
| D | Duty cycle | 0.5 |
| Ts | Switching period | 0.654 ms |
| Parameters | Description | Numerical Value |
|---|---|---|
| Pmax | Maximum power | 200.143 W |
| Vmpp | Voltage at Pmax | 26.3 V |
| Impp | Current at Pmax | 7.61 A |
| Isc | Short-circuit current | 8.21 A |
| Voc | Open-circuit voltage | 32.9 V |
| KV | Open-circuit voltage temperature coefficient | −0.1230 V/K |
| Ki | Short-circuit current temperature coefficient | 0.0032 A/K |
| RTH | Thévenin resistance | 415.405 Ω |
| Rs | Series resistance | 10 Ω |
| Rp,STC | Shunt resistance at STC | 405.405 Ω |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hazil, O.; Allouani, F.; Bououden, S.; Chadli, M.; Chemachema, M.; Boulkaibet, I.; Neji, B. A Robust Model Predictive Control for a Photovoltaic Pumping System Subject to Actuator Saturation Nonlinearity. Sustainability 2023, 15, 4493. https://doi.org/10.3390/su15054493
Hazil O, Allouani F, Bououden S, Chadli M, Chemachema M, Boulkaibet I, Neji B. A Robust Model Predictive Control for a Photovoltaic Pumping System Subject to Actuator Saturation Nonlinearity. Sustainability. 2023; 15(5):4493. https://doi.org/10.3390/su15054493
Chicago/Turabian StyleHazil, Omar, Fouad Allouani, Sofiane Bououden, Mohammed Chadli, Mohamed Chemachema, Ilyes Boulkaibet, and Bilel Neji. 2023. "A Robust Model Predictive Control for a Photovoltaic Pumping System Subject to Actuator Saturation Nonlinearity" Sustainability 15, no. 5: 4493. https://doi.org/10.3390/su15054493