
Optimal Model Predictive Control for Virtual Inertia Control of Autonomous Microgrids
 , , ,
, , ,  and
and
Abstract
:1. Introduction
2. System Modeling
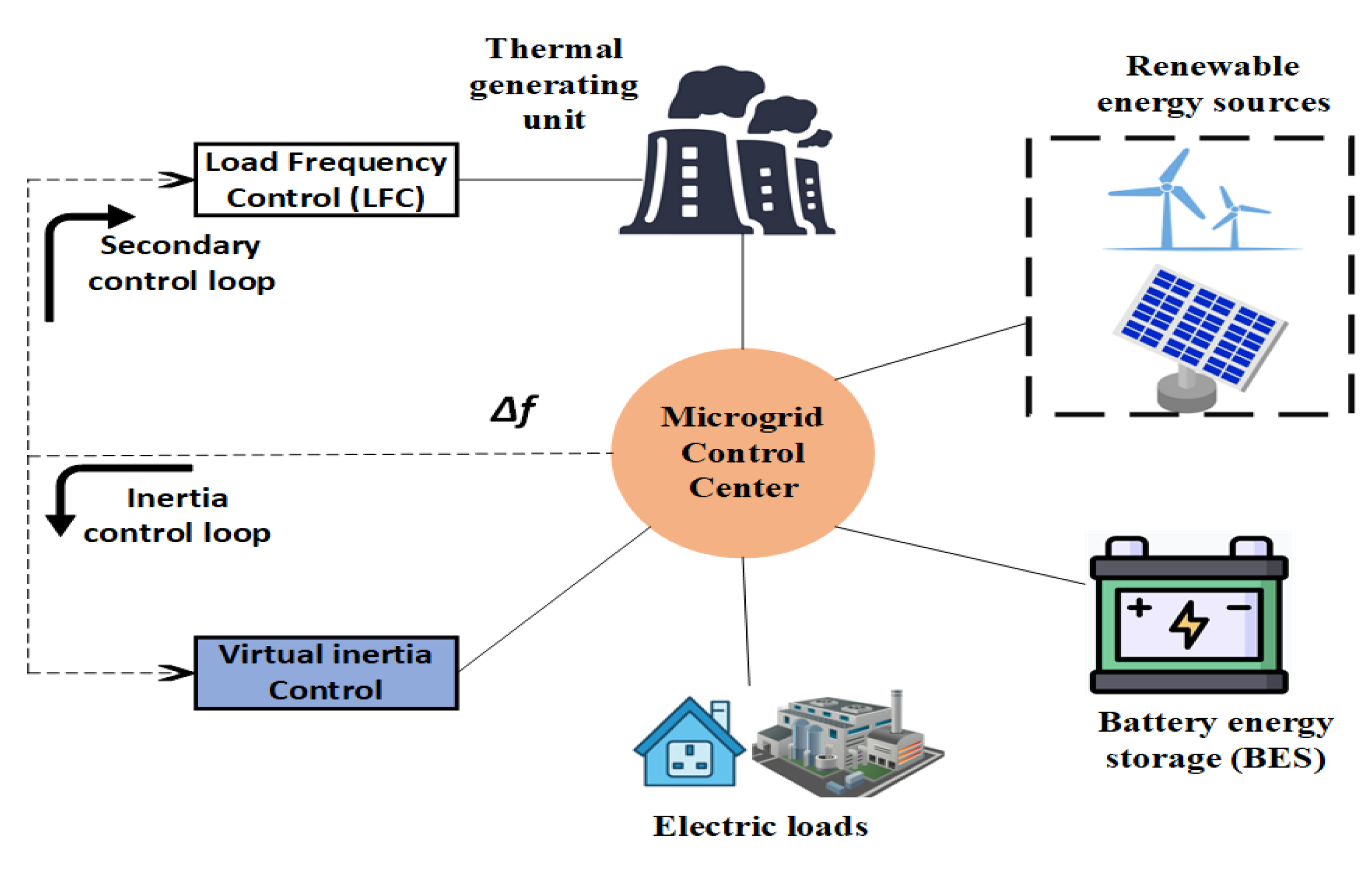
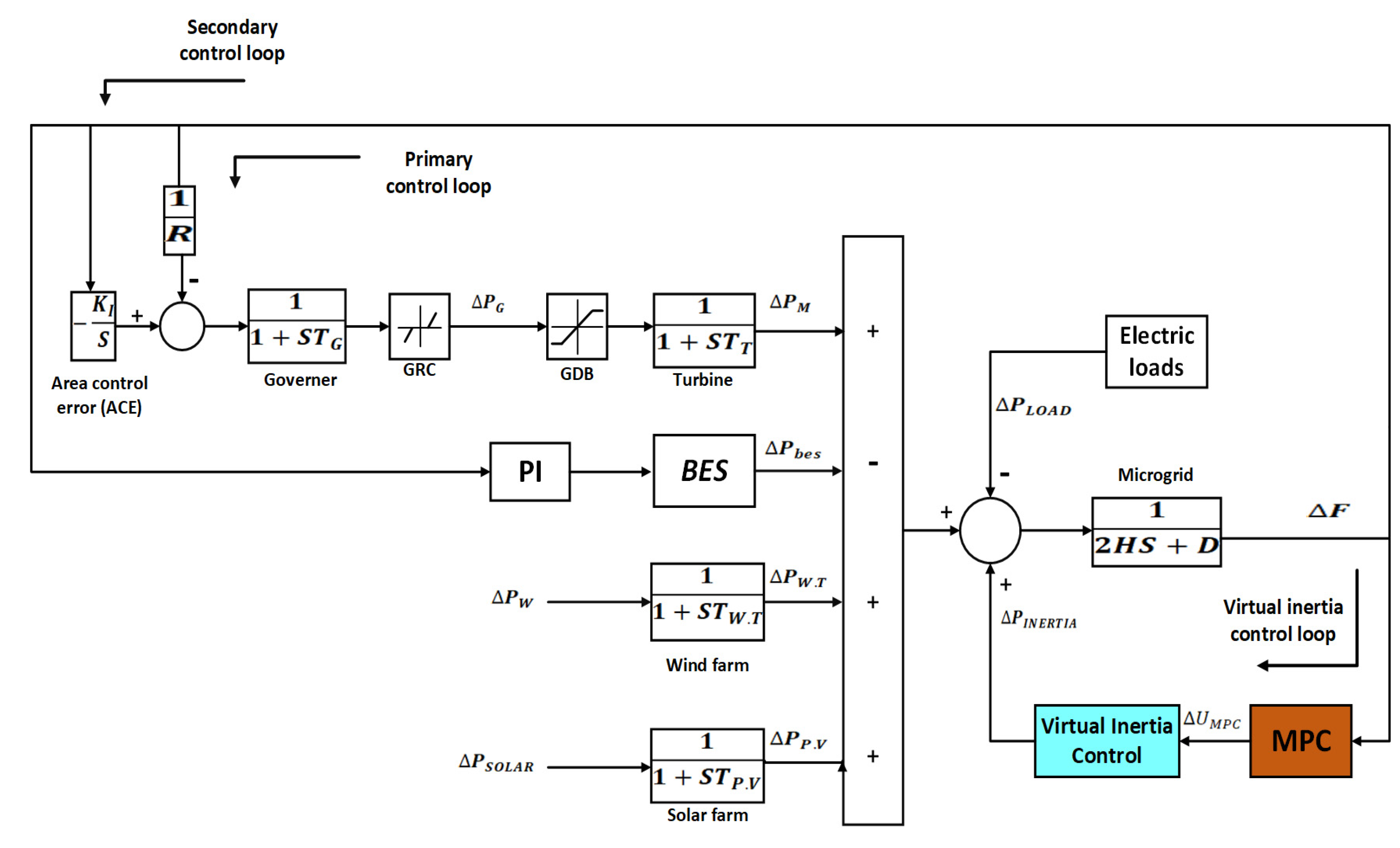
2.1. Microgrid Structure
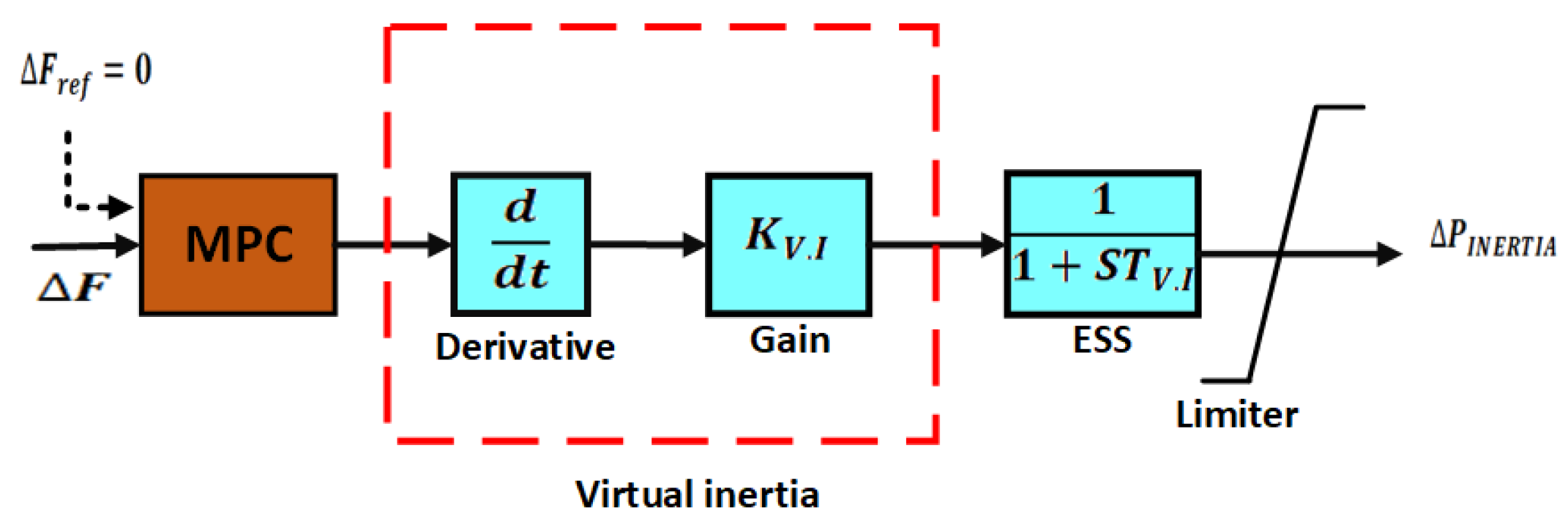
2.2. Virtual Inertia Control Modeling
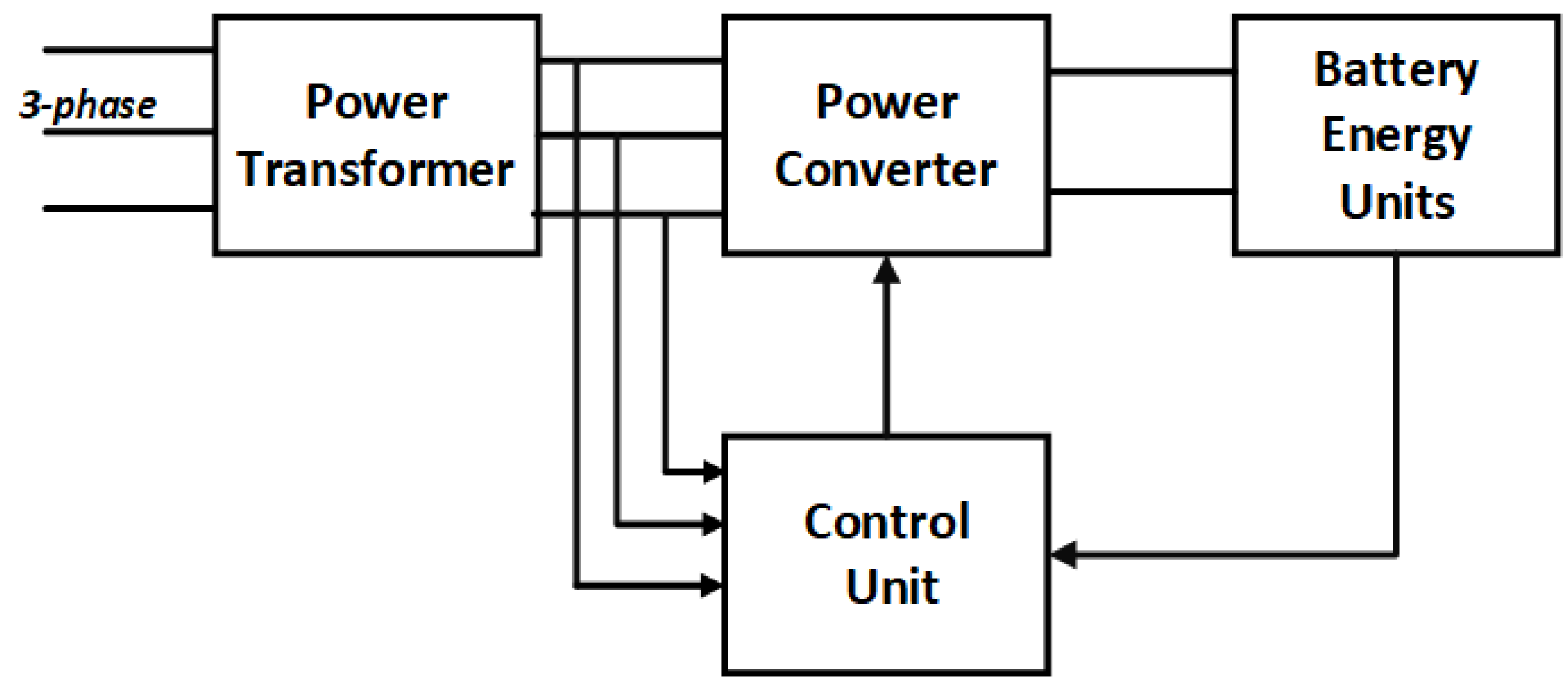
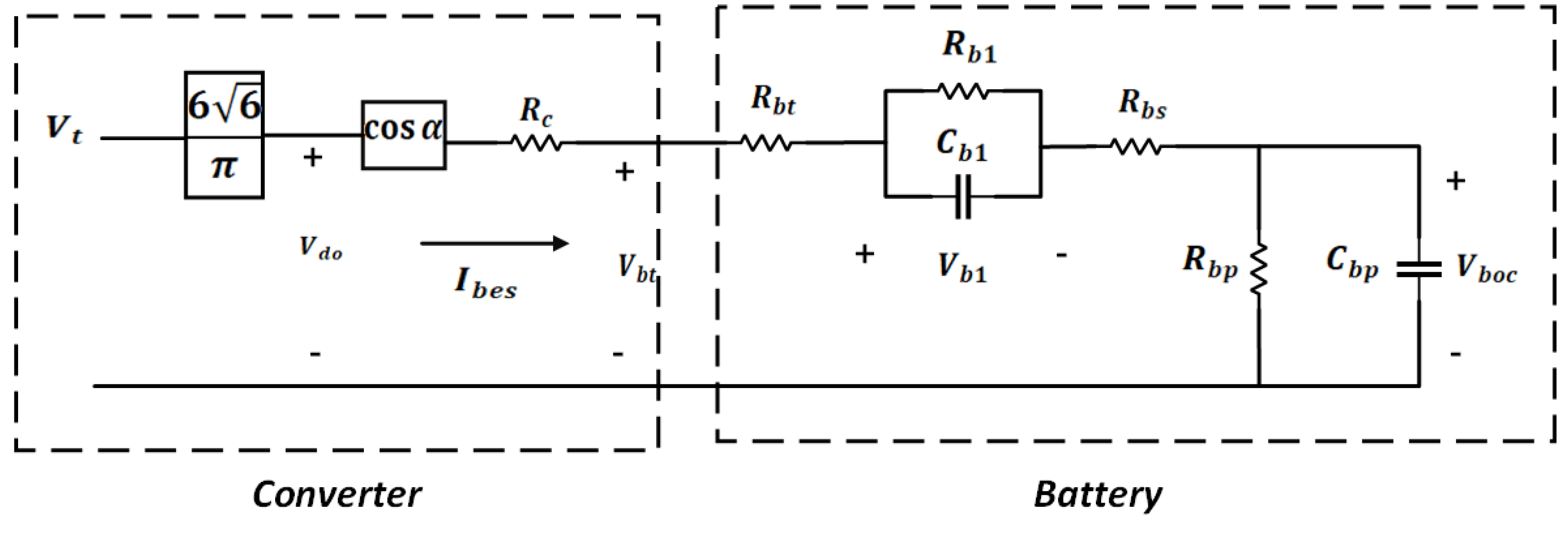
2.3. BES Modeling
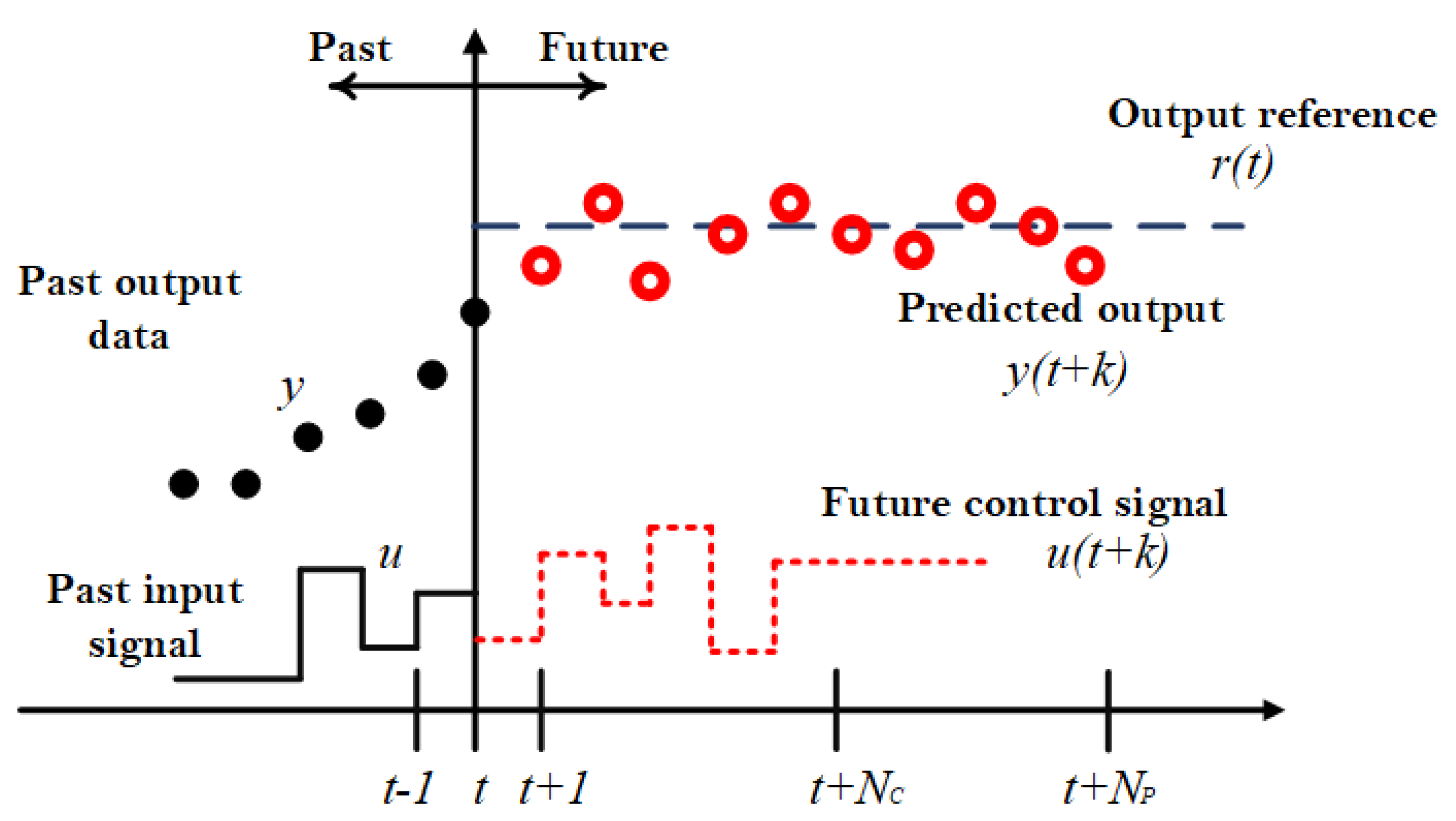
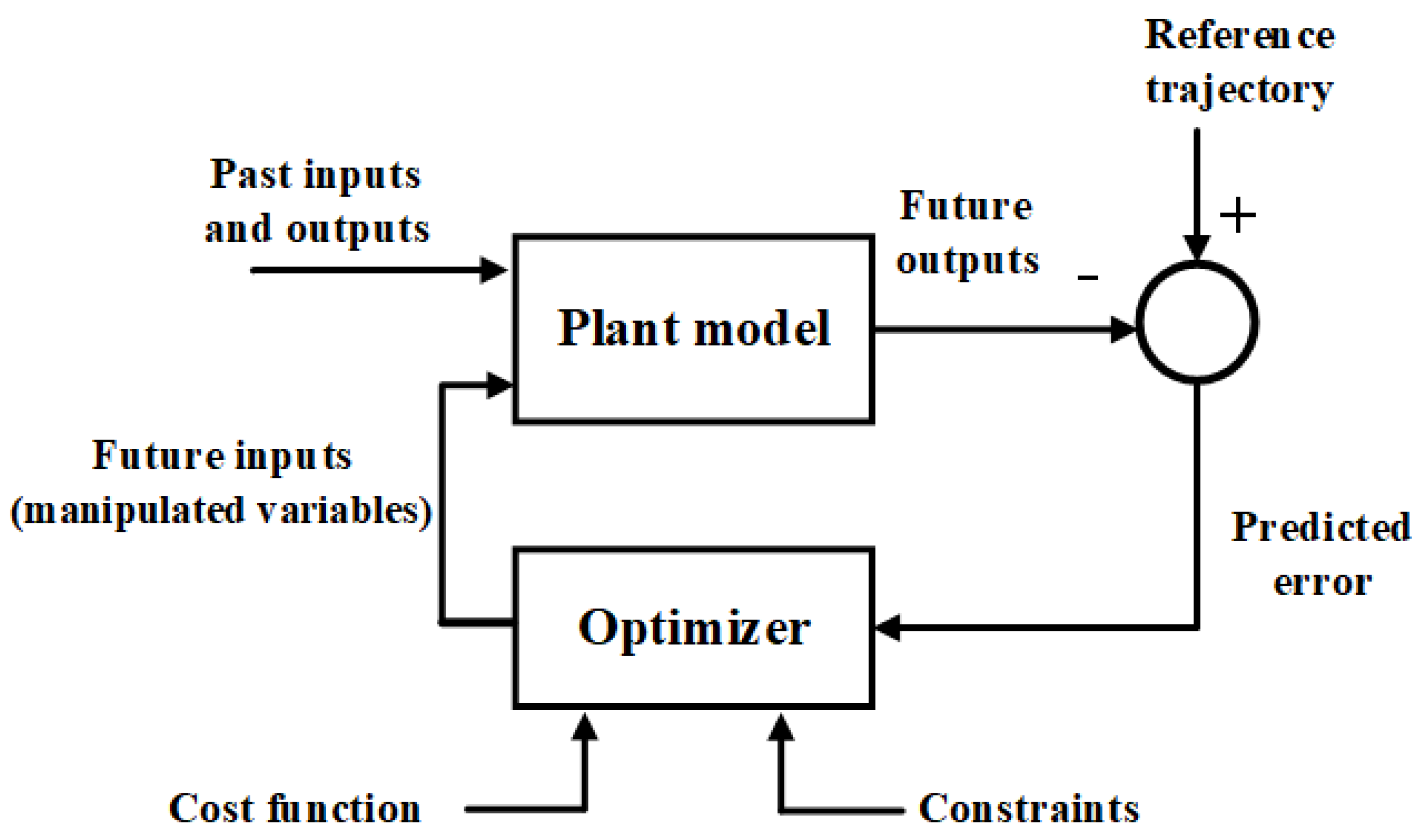
3. Optimal MPC Design
- Step 1: At sampling instant , MPC measures the microgrid output frequency change .
- Step 2: Based on the current microgrid frequency information, MPC computes sequence of control actions
- Step 3: Only the first control step is applied to the virtual inertia model to obtain the injected inertia power. Thus, is now determined.
- Step 4: Repeat the previous steps at the next sampling instant . The termination occurs when the agreement of the tracking consensus is attained within the constraints.
4. African Vultures Optimization Algorithm
- There are African vultures in the search space. This number presents the population size in the algorithm. Additionally, it depends on the optimization problem to be solved using the AVOA.
- Various vultures in the environment can be physically divided into three categories. This is accomplished by calculating the fitness of all available solutions based on the initial population of each vulture. The best solution represents the first-best vulture, the second-best answer represents the second-best vulture in the environment, and other vultures form the third category, which moves to the best two vultures in the search space.
- In the natural environment, the ability of each group of vultures to find food differs from one group to another, and this is primarily the reason for dividing the vultures into categories.
- The vultures can escape hunger by searching for food for many hours. By assuming that the weakest and hungriest vulture is related to the worst solution and that the strongest vulture is related to the best solution in the population, the vultures aim to keep away from the worst vultures while finding the best answer.
- a.
- Step 1: Vulture Grouping
- b.
- Step 2: Vultures’ Rate of Starvation
- c.
- Step 3: Exploration Phase:
- d.
- Step 4: Exploitation Phase (First Stage):
- e.
- Step 5: Exploitation Phase (Second Stage):
5. Simulation Results
5.1. System under Study
5.2. Scenario 1: Evaluation of Microgrid Performance without RES and BES
- Prediction horizon = 22;
- Control horizon = 5;
- Output signal weight = 4;
- Manipulated variable weight = 0;
- Weight on manipulated variable rate = 0.01.
- Maximum frequency change = 0.5 Hz
- Minimum frequency change = −0.5 Hz
- Maximum control signal (inertia power) = 0.24 p.u. MW
- Minimum control signal = −0.24 p.u. MW
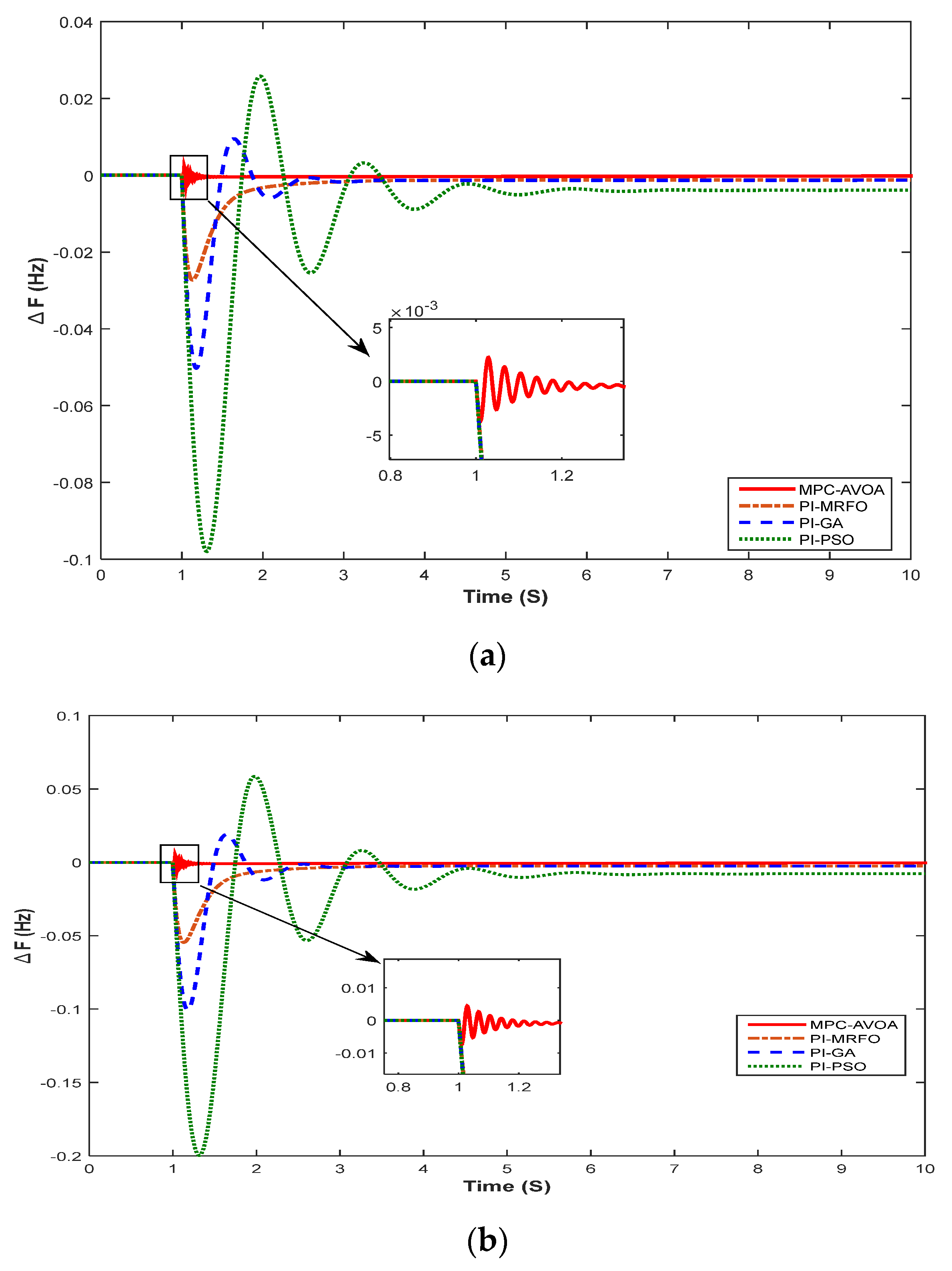
5.3. Scenario 2: Evaluation of Microgrid Performance under Reduced Microgrid Inertia
5.4. Scenario 3: Evaluation of Microgrid Performance with RES
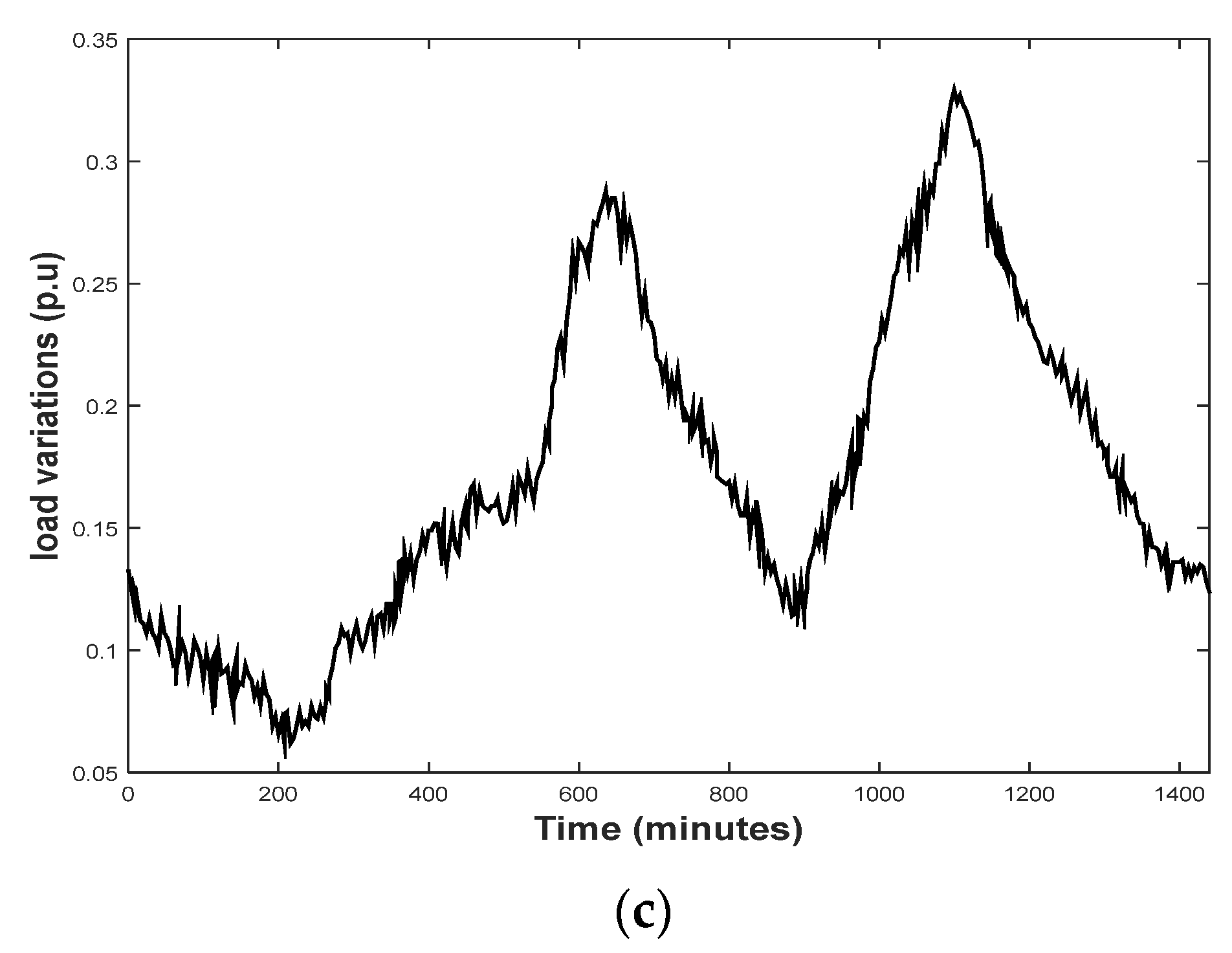
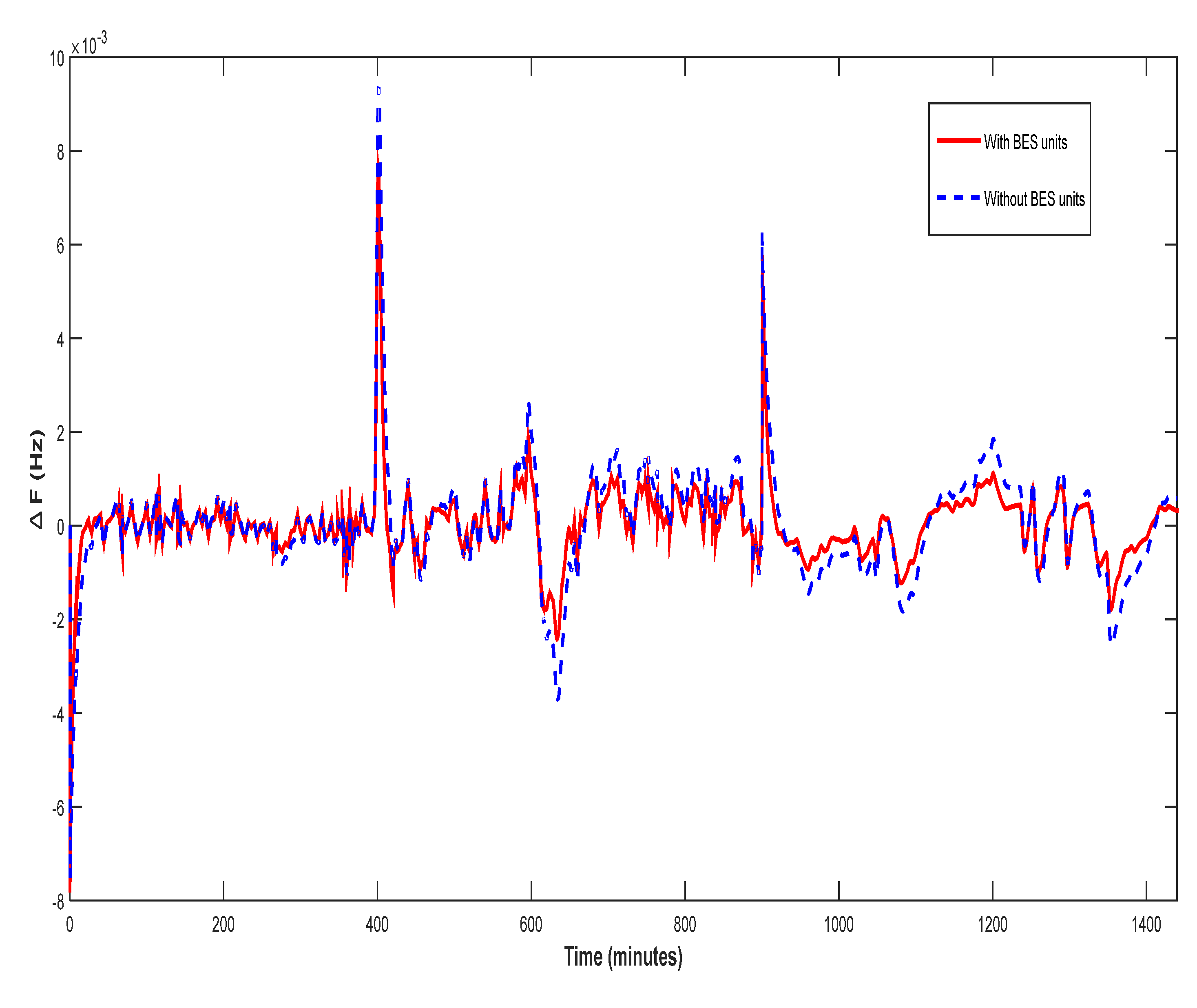
5.5. Scenario 4: Evaluation of Microgrid Performance with RES and BES Units
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cheema, K.M. A comprehensive review of virtual synchronous generator. Int. J. Electr. Power Energy Syst. 2020, 120, 106006. [Google Scholar] [CrossRef]
- Chandak, S.; Rout, P.K. The implementation framework of a microgrid: A review. Int. J. Energy Res. 2020, 45, 3523–3547. [Google Scholar] [CrossRef]
- Palaniappan, R.; Molodchyk, O.; Shariati-Sarcheshmeh, M.; Asmah, M.W.; Liu, J.; Schlichtherle, T.; Richter, F.; Kwofie, E.A.; Festner, D.R.; Blanco, G.; et al. Experimental verification of smart grid control functions on international grids using a real-time simulator. IET Gener. Transm. Distrib. 2022, 16, 2747–2760. [Google Scholar] [CrossRef]
- Rehman, H.U.; Yan, X.; Abdelbaky, M.A.; Jan, M.U.; Iqbal, S. An advanced virtual synchronous generator control technique for frequency regulation of grid-connected PV system. Int. J. Electr. Power Energy Syst. 2021, 125, 106440. [Google Scholar] [CrossRef]
- Zakir, M.; Arshad, A.; Sher, H.A.; Al-Durra, A. Design and implementation of a fault detection method for a PV-fed DC-microgrid with power control mechanism. IET Electr. Power Appl. 2022, 16, 1057–1071. [Google Scholar] [CrossRef]
- Karimi, A.; Khayat, Y.; Naderi, M.; Dragicevic, T.; Mirzaei, R.; Blaabjerg, F.; Bevrani, H. Inertia Response Improvement in AC Microgrids: A Fuzzy-Based Virtual Synchronous Generator Control. IEEE Trans. Power Electron. 2019, 35, 4321–4331. [Google Scholar] [CrossRef]
- Gherairi, S. Design and implementation of an intelligent energy management system for smart home utilizing a multi-agent system. Ain Shams Eng. J. 2022, 14, 101897. [Google Scholar] [CrossRef]
- Kim, H.-J.; Kim, M.-K. Multi-Objective Based Optimal Energy Management of Grid-Connected Microgrid Considering Advanced Demand Response. Energies 2019, 12, 4142. [Google Scholar] [CrossRef] [Green Version]
- Zakir, M.; Sher, H.A.; Arshad, A.; Lehtonen, M. A fault detection, localization, and categorization method for PV fed DC-microgrid with power-sharing management among the nano-grids. Int. J. Electr. Power Energy Syst. 2022, 137, 107858. [Google Scholar] [CrossRef]
- Li, L.; Chen, W.; Han, Y.; Li, Q.; Pu, Y. A Stability Enhancement Method Based on Adaptive Virtual Resistor for Electric-hydrogen Hybrid DC Microgrid Grid-connected Inverter Under Weak Grid. Electr. Power Syst. Res. 2021, 191, 106882. [Google Scholar] [CrossRef]
- Mokhtar, M.; Marei, M.I.; Attia, M.A. Hybrid SCA and adaptive controller to enhance the performance of grid-connected PV system. Ain Shams Eng. J. 2021, 12, 3775–3781. [Google Scholar] [CrossRef]
- Willenberg, D.; Winkens, A.; Linnartz, P. Impact of wind turbine generator technologies and frequency controls on the stable operation of medium voltage islanded microgrids. Electr. Power Syst. Res. 2020, 189, 106760. [Google Scholar] [CrossRef]
- Kerdphol, T.; Watanabe, M.; Mitani, Y.; Turschner, D.; Beck, H.P. Stability Assessment of Multiple Virtual Synchronous Machines for Microgrid Frequency Stabilization. In Proceedings of the 2020 IEEE Power & Energy Society General Meeting (PESGM), Montreal, QC, Canada, 2–6 August 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Hou, X.; Sun, Y.; Zhang, X.; Lu, J.; Wang, P.; Guerrero, J.M. Improvement of Frequency Regulation in VSG-Based AC Microgrid Via Adaptive Virtual Inertia. IEEE Trans. Power Electron. 2019, 35, 1589–1602. [Google Scholar] [CrossRef]
- Mallemaci, V.; Mandrile, F.; Rubino, S.; Mazza, A.; Carpaneto, E.; Bojoi, R. A comprehensive comparison of Virtual Synchronous Generators with focus on virtual inertia and frequency regulation. Electr. Power Syst. Res. 2021, 201, 107516. [Google Scholar] [CrossRef]
- Xiong, X.; Wu, C.; Blaabjerg, F. An improved synchronization stability method of virtual synchronous generators based on frequency feedforward on reactive power control loop. IEEE Trans. Power Electron. 2021, 36, 9136–9148. [Google Scholar] [CrossRef]
- Liu, R.; Wang, S.; Liu, G.; Wen, S.; Zhang, J.; Ma, Y. An Improved Virtual Inertia Control Strategy for Low Voltage AC Microgrids with Hybrid Energy Storage Systems. Energies 2022, 15, 442. [Google Scholar] [CrossRef]
- Fathi, A.; Shafiee, Q.; Bevrani, H. Robust Frequency Control of Microgrids Using an Extended Virtual Synchronous Generator. IEEE Trans. Power Syst. 2018, 33, 6289–6297. [Google Scholar] [CrossRef]
- Saxena, P.; Singh, N.; Pandey, A.K. Enhancing the dynamic performance of microgrid using derivative controlled solar and energy storage based virtual inertia system. J. Energy Storage 2020, 31, 101613. [Google Scholar] [CrossRef]
- Kerdphol, T.; Rahman, F.S.; Watanabe, M.; Mitani, Y.; Turschner, D.; Beck, H.-P. Enhanced Virtual Inertia Control Based on Derivative Technique to Emulate Simultaneous Inertia and Damping Properties for Microgrid Frequency Regulation. IEEE Access 2019, 7, 14422–14433. [Google Scholar] [CrossRef]
- Kerdphol, T.; Watanabe, M.; Hongesombut, K.; Mitani, Y. Self-Adaptive Virtual Inertia Control-Based Fuzzy Logic to Improve Frequency Stability of Microgrid with High Renewable Penetration. IEEE Access 2019, 7, 76071–76083. [Google Scholar] [CrossRef]
- Ali, H.; Magdy, G.; Li, B.; Shabib, G.; Elbaset, A.A.; Xu, D.; Mitani, Y. A New Frequency Control Strategy in an Islanded Microgrid Using Virtual Inertia Control-Based Coefficient Diagram Method. IEEE Access 2019, 7, 16979–16990. [Google Scholar] [CrossRef]
- Kerdphol, T.; Rahman, F.S.; Mitani, Y.; Watanabe, M.; Küfeoğlu, S.K. Robust Virtual Inertia Control of an Islanded Microgrid Considering High Penetration of Renewable Energy. IEEE Access 2017, 6, 625–636. [Google Scholar] [CrossRef]
- Ali, H.; Magdy, G.; Xu, D. A new optimal robust controller for frequency stability of interconnected hybrid microgrids considering non-inertia sources and uncertainties. Int. J. Electr. Power Energy Syst. 2021, 128, 106651. [Google Scholar] [CrossRef]
- Kerdphol, T.; Watanabe, M.; Mitani, Y.; Phunpeng, V. Applying Virtual Inertia Control Topology to SMES System for Frequency Stability Improvement of Low-Inertia Microgrids Driven by High Renewables. Energies 2019, 12, 3902. [Google Scholar] [CrossRef] [Green Version]
- Magdy, G.; Bakeer, A.; Nour, M.; Petlenkov, E. A New Virtual Synchronous Generator Design Based on the SMES System for Frequency Stability of Low-Inertia Power Grids. Energies 2020, 13, 5641. [Google Scholar] [CrossRef]
- Saleh, A.; Omran, W.A.; Hasanien, H.M.; Tostado-Véliz, M.; Alkuhayli, A.; Jurado, F. Manta Ray Foraging Optimization for the Virtual Inertia Control of Islanded Microgrids Including Renewable Energy Sources. Sustainability 2022, 14, 4189. [Google Scholar] [CrossRef]
- Magdy, G.; Shabib, G.; Elbaset, A.A.; Mitani, Y. A Novel Coordination Scheme of Virtual Inertia Control and Digital Protection for Microgrid Dynamic Security Considering High Renewable Energy Penetration. IET Renew. Power Gener. 2019, 13, 462–474. [Google Scholar] [CrossRef]
- Skiparev, V.; Machlev, R.; Chowdhury, N.; Levron, Y.; Petlenkov, E.; Belikov, J. Virtual Inertia Control Methods in Islanded Microgrids. Energies 2021, 14, 1562. [Google Scholar] [CrossRef]
- Bordons, C.; Garcia-Torres, F.; Ridao, M.A. Model Predictive Control of Microgrids; Springer: Cham, Switzerland, 2020; Volume 358. [Google Scholar]
- Sun, Q.; Zhang, K.; Shi, Y. Resilient Model Predictive Control of Cyber–Physical Systems Under DoS Attacks. IEEE Trans. Ind. Informatics 2019, 16, 4920–4927. [Google Scholar] [CrossRef]
- Di Cairano, S.; Kolmanovsky, I.V. Real-time optimization and model predictive control for aerospace and automotive applications. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Hu, J.; Shan, Y.; Guerrero, J.M.; Ioinovici, A.; Chan, K.W.; Rodriguez, J. Model predictive control of microgrids—An overview. Renew. Sustain. Energy Rev. 2021, 136, 110422. [Google Scholar] [CrossRef]
- Nelson, J.R.; Johnson, N.G. Model predictive control of microgrids for real-time ancillary service market participation. Appl. Energy 2020, 269, 114963. [Google Scholar] [CrossRef]
- Jan, M.U.; Xin, A.; Rehman, H.U.; Abdelbaky, M.A.; Iqbal, S.; Aurangzeb, M. Frequency regulation of an isolated microgrid with electric vehicles and energy storage system integration using adaptive and model predictive controllers. IEEE Access 2021, 9, 14958–14970. [Google Scholar] [CrossRef]
- Gbadega, P.A.; Saha, A.K. Load Frequency Control of a Two-Area Power System with a Stand-Alone Microgrid Based on Adaptive Model Predictive Control. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 7253–7263. [Google Scholar] [CrossRef]
- Kerdphol, T.; Rahman, F.S.; Mitani, Y.; Hongesombut, K.; Küfeoğlu, S. Virtual Inertia Control-Based Model Predictive Control for Microgrid Frequency Stabilization Considering High Renewable Energy Integration. Sustainability 2017, 9, 773. [Google Scholar] [CrossRef] [Green Version]
- Abdollahzadeh, B.; Gharehchopogh, F.S.; Mirjalili, S. African vultures optimization algorithm: A new nature-inspired metaheuristic algorithm for global optimization problems. Comput. Ind. Eng. 2021, 158, 107408. [Google Scholar] [CrossRef]
- Wang, Y.; Li, S.; Sun, H.; Huang, C.; Youssefi, N. The utilization of adaptive African vulture optimizer for optimal parameter identification of SOFC. Energy Rep. 2022, 8, 551–560. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, J.; Yang, L.; Ma, B.; Sun, G.; Youssefi, N. Optimal designing of a hybrid renewable energy system connected to an unreliable grid based on enhanced African vulture optimizer. ISA Trans. 2022, 129, 424–435. [Google Scholar] [CrossRef]
- Kerdphol, T.; Rahman, F.S.; Mitani, Y. Virtual Inertia Control Application to Enhance Frequency Stability of Interconnected Power Systems with High Renewable Energy Penetration. Energies 2018, 11, 981. [Google Scholar] [CrossRef] [Green Version]
- Lu, K.; Zhou, W.; Zeng, G.; Zheng, Y. Constrained population extremal optimization-based robust load frequency control of multi-area interconnected power system. Int. J. Electr. Power Energy Syst. 2019, 105, 249–271. [Google Scholar] [CrossRef]
- Alayi, R.; Zishan, F.; Seyednouri, S.R.; Kumar, R.; Ahmadi, M.H.; Sharifpur, M. Optimal Load Frequency Control of Island Microgrids via a PID Controller in the Presence of Wind Turbine and PV. Sustainability 2021, 13, 10728. [Google Scholar] [CrossRef]
- Sobhy, M.A.; Abdelaziz, A.Y.; Hasanien, H.M.; Ezzat, M. Marine predators algorithm for load frequency control of modern interconnected power systems including renewable energy sources and energy storage units. Ain Shams Eng. J. 2021, 12, 3843–3857. [Google Scholar] [CrossRef]
- Kerdphol, T.; Fuji, K.; Mitani, Y.; Watanabe, M.; Qudaih, Y. Optimization of a battery energy storage system using particle swarm optimization for stand-alone microgrids. Int. J. Electr. Power Energy Syst. 2016, 81, 32–39. [Google Scholar] [CrossRef]
- Aditya, S.; Das, D. Battery energy storage for load frequency control of an interconnected power system. Electr. Power Syst. Res. 2001, 58, 179–185. [Google Scholar] [CrossRef]
- Lu, C.F.; Liu, C.C.; Wu, C.J. Effect of battery energy storage system on load frequency control considering governor deadband and generation rate constraint. IEEE Trans. Energy Convers. 1995, 10, 555–561. [Google Scholar]
- Cai, S.; Matsuhashi, R. Model Predictive Control for EV Aggregators Participating in System Frequency Regulation Market. IEEE Access 2021, 9, 80763–80771. [Google Scholar] [CrossRef]
- Huang, H.; Xu, H.; Chen, F.; Zhang, C.; Mohammadzadeh, A. An Applied Type-3 Fuzzy Logic System: Practical Matlab Simulink and M-Files for Robotic, Control, and Modeling Applications. Symmetry 2023, 15, 475. [Google Scholar] [CrossRef]
- Hassanpour, H.; Corbett, B.; Mhaskar, P. Artificial Neural Network-Based Model Predictive Control Using Correlated Data. Ind. Eng. Chem. Res. 2022, 61, 3075–3090. [Google Scholar] [CrossRef]
- Bordons, C.; Garcia-Torres, F.; Ridao, M.A. Model Predictive Control Fundamentals. In Model Predictive Control of Microgrids; Springer: Cham, Switzerland, 2020; pp. 25–44. [Google Scholar]
- Hussain, A.; Sher, H.A.; Murtaza, A.F.; Al-Haddad, K. Improved voltage controlled three phase voltage source inverter using model predictive control for standalone system. In Proceedings of the IECON 2018-44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Salah, B.; Hasanien, H.M.; Ghali, F.M.; Alsayed, Y.M.; Abdel Aleem, S.H.; El-Shahat, A. African Vulture Optimization-Based Optimal Control Strategy for Voltage Control of Islanded DC Microgrids. Sustainability 2022, 14, 11800. [Google Scholar] [CrossRef]
- Pratap, A.; Tiwari, P.; Maurya, R.; Singh, B. Minimisation of electric vehicle charging stations impact on radial distribution networks by optimal allocation of DSTATCOM and DG using African vulture optimisation algorithm. Int. J. Ambient. Energy 2022, 43, 8653–8672. [Google Scholar] [CrossRef]
- Hasanien, H.M. Whale optimisation algorithm for automatic generation control of interconnected modern power systems including renewable energy sources. IET Gener. Transm. Distrib. 2018, 12, 607–614. [Google Scholar] [CrossRef]
- Lara-Santillán, P.M.; Mendoza-Villena, M.; Fernández-Jiménez, L.A.; Mañana-Canteli, M. A Comparative Study of Electric Load Curve Changes in an Urban Low-Voltage Substation in Spain during the Economic Crisis (2008–2013). Sci. World J. 2014, 2014, 948361. [Google Scholar] [CrossRef] [PubMed] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Lower Limit | Upper Limit |
|---|---|---|
| Prediction horizon | 1 | 30 |
| Control horizon | 1 | 10 |
| Output signal weight | 0 | 5 |
| Manipulated variable weight | 0 | 5 |
| Weight on manipulated variable rate | 0 | 0.5 |
| 1 | Initialize the population size and maximum number of iterations | |||||
| 2 | while () | |||||
| 3 | Calculate the fitness value of the vulture | |||||
| 4 | Evaluate first and second best vultures | |||||
| 5 | for (each vulture ) do | |||||
| 6 | Determine using Equation (29) | |||||
| 7 | Determine F using Equation (31) after updating t and z | |||||
| 8 | If (F ≥ 1) | |||||
| 9 | If () | |||||
| 10 | Update the vulture’s position using Equation (33) | |||||
| 11 | else, | |||||
| 12 | Update the vulture’s position using Equation (34) | |||||
| 13 | If (F < 1) | |||||
| 14 | If (F ≥ 0.5) | |||||
| 15 | If () | |||||
| 16 | Update the vulture’s position using Equation (36) | |||||
| 17 | else, | |||||
| 18 | Update the vulture’s position using Equation (37) | |||||
| 19 | else If (F < 0.5) | |||||
| 20 | If () | |||||
| 21 | Update the vulture’s position using Equation (41) | |||||
| 22 | else, | |||||
| 23 | Update the vulture’s position using Equation (44) | |||||
| 24 | t = t + 1 | |||||
| 25 | end while | |||||
| 26 | Return first best vulture | |||||
| Parameter | Meaning | Value |
|---|---|---|
| D (p.u. MW/Hz) | System damping | 0.015 |
| H (p.u. MW s) | Total inertial constant | 0.083 |
| (S) | Governor time constant | 0.1 |
| (S) | Turbine time constant | 0.4 |
| (S) | Wind time constant | 1.5 |
| (S) | Solar time constant | 1.8 |
| Integral control gain | 0.05 | |
| R (Hz/p.u. MW) | Speed droop constant | 2.4 |
| (S) | Virtual inertial time constant | 10 |
| Virtual inertial gain | 0.5 | |
| (p.u. MW) | Maximum valve gate limit | 0.3 |
| (p.u. MW) | Minimum valve gate limit | −0.3 |
| GRC (p.u. MW/minute) | Generation rate constraint | 0.2 |
| Algorithm | SLP | HPSC (Hz) | LPSC (Hz) | TOS(s) | SSE (Hz) |
|---|---|---|---|---|---|
| MPC-AVOA | 5% | 0.0012 | 0.00265 | 0 | 0 |
| PI-MRFO | 0 | 0.02431 | 1.35 | 0.0012 | |
| PI-GA | 0.01117 | 0.04041 | 1.5 | 0.0013 | |
| PI-PSO | 0.01868 | 0.0751 | 1.93 | 0.0038 | |
| MPC-AVOA | 10% | 0.0024 | 0.0053 | 0 | 0 |
| PI-MRFO | 0 | 0.04856 | 1.56 | 0.0024 | |
| PI-GA | 0.02252 | 0.08091 | 1.97 | 0.0026 | |
| PI-PSO | 0.03731 | 0.1506 | 3.64 | 0.0077 |
| Algorithm | SLP | HPSC (Hz) | LPSC (Hz) | TOS(s) | SSE (Hz) |
|---|---|---|---|---|---|
| MPC-AVOA | 5% | 0.0022 | 0.0037 | 0 | 0 |
| PI-MRFO | 0 | 0.0273 | 1.28 | 0.0012 | |
| PI-GA | 0.0094 | 0.0502 | 138 | 0.0015 | |
| PI-PSO | 0.026 | 0.098 | 2.75 | 0.0039 | |
| MPC-AVOA | 10% | 0.0045 | 0.0075 | 0 | 0 |
| PI-MRFO | 0 | 0.0545 | 1.48 | 0.0026 | |
| PI-GA | 0.019 | 0.1005 | 1.65 | 0.0028 | |
| PI-PSO | 0.059 | 0.2 | 3.12 | 0.0079 |
| Disruption | Starting Time (Minutes) | Stopping Time (Minutes) | Size (MW) |
|---|---|---|---|
| Wind farm | 400 | - | 10 MW |
| Solar farm | initial | - | 8 MW |
| Domestic load | initial | 900 | 15 MW |
| Controller | Maximum Overshoot (HZ) | Minima Overshoot (HZ) |
|---|---|---|
| AVOA-MPC | 0.01 | 0.008 |
| MRFO-PI | 0.061 | 0.057 |
| GA-PI | 0.1 | 0.092 |
| PSO-PI | 0.19 | 0.16 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saleh, A.; Hasanien, H.M.; A. Turky, R.; Turdybek, B.; Alharbi, M.; Jurado, F.; Omran, W.A. Optimal Model Predictive Control for Virtual Inertia Control of Autonomous Microgrids. Sustainability 2023, 15, 5009. https://doi.org/10.3390/su15065009
Saleh A, Hasanien HM, A. Turky R, Turdybek B, Alharbi M, Jurado F, Omran WA. Optimal Model Predictive Control for Virtual Inertia Control of Autonomous Microgrids. Sustainability. 2023; 15(6):5009. https://doi.org/10.3390/su15065009
Chicago/Turabian StyleSaleh, Amr, Hany M. Hasanien, Rania A. Turky, Balgynbek Turdybek, Mohammed Alharbi, Francisco Jurado, and Walid A. Omran. 2023. "Optimal Model Predictive Control for Virtual Inertia Control of Autonomous Microgrids" Sustainability 15, no. 6: 5009. https://doi.org/10.3390/su15065009