
To Share or Not to Share—Expected Transportation Mode Changes Given Different Types of Fully Automated Vehicles
Abstract
:1. Introduction
1.1. Fully Automated Vehicles (AVs)
1.2. Ecological Sustainability of AVs
1.3. Research Goals and Questions
2. Materials and Methods
2.1. Study Design
2.2. Participants
2.3. Questionnaires
2.4. Procedure
2.5. Data Preparation and Analysis
3. Results
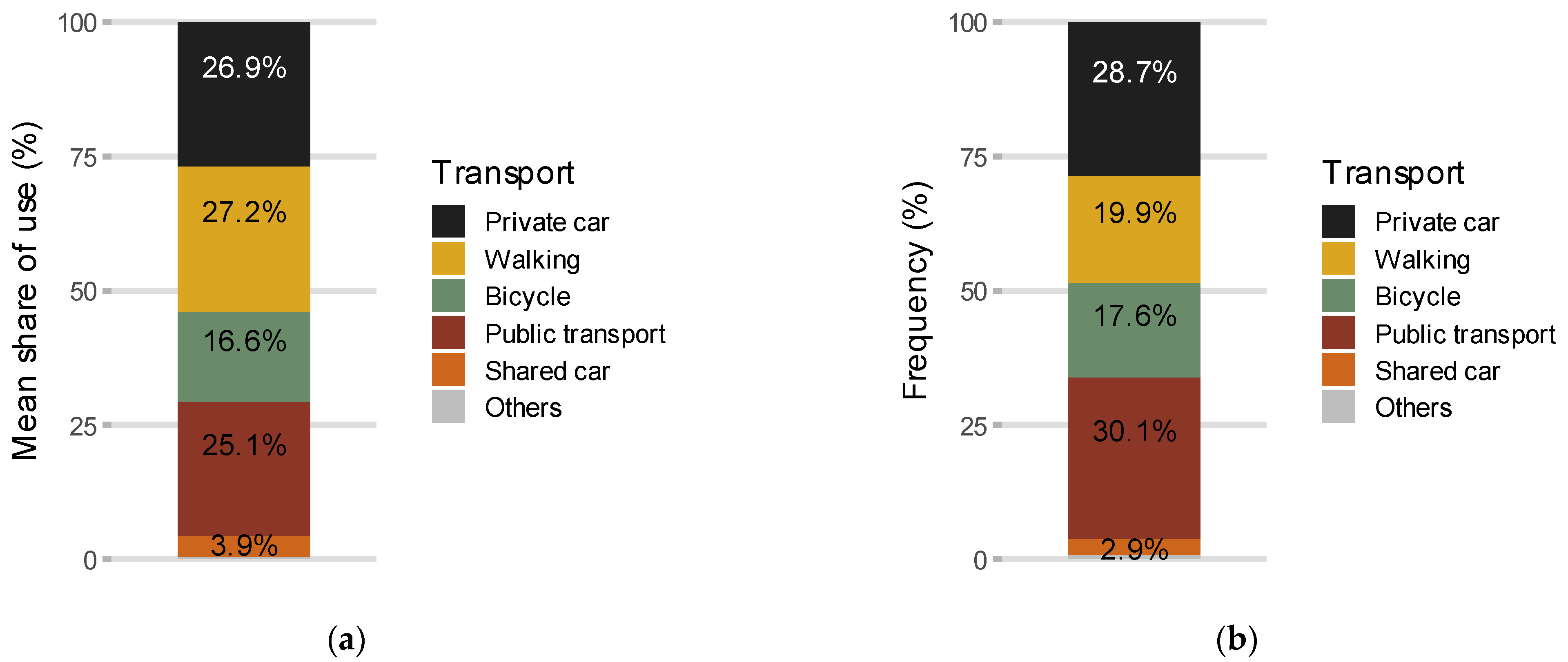
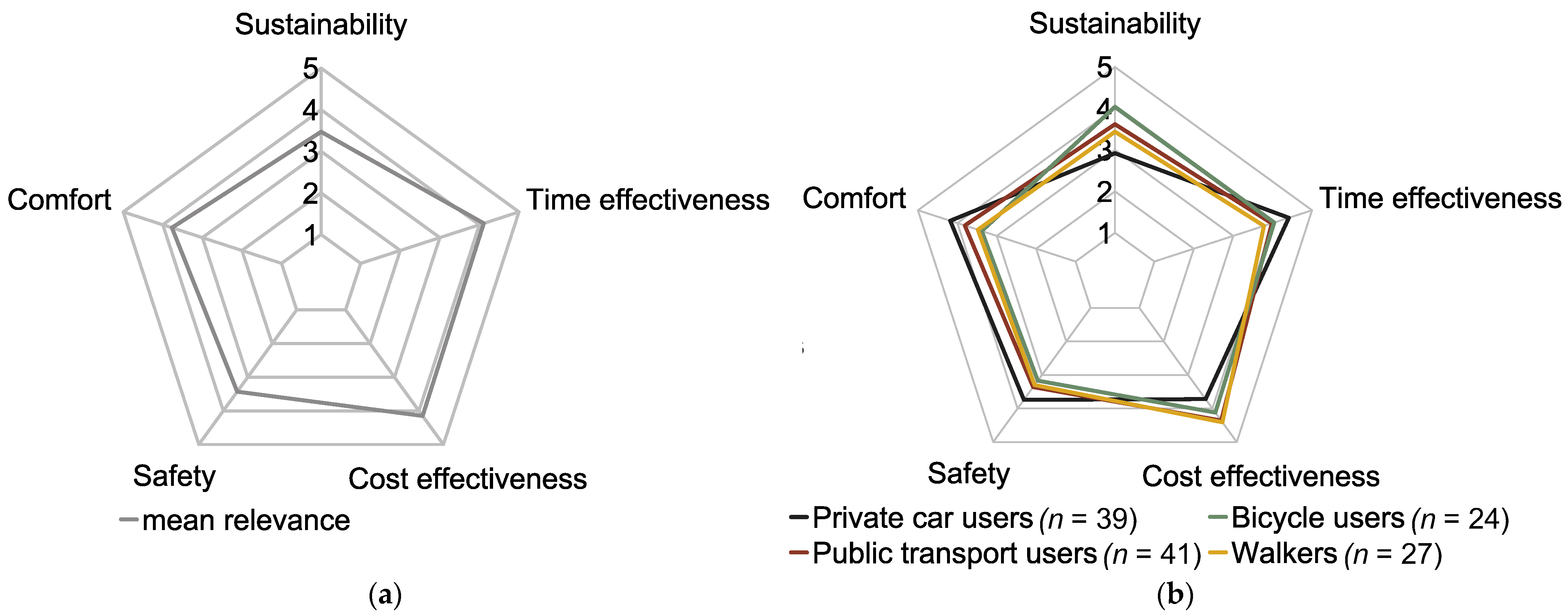
3.1. Status Quo: Current Transportation Mode Choice and Mobility Needs
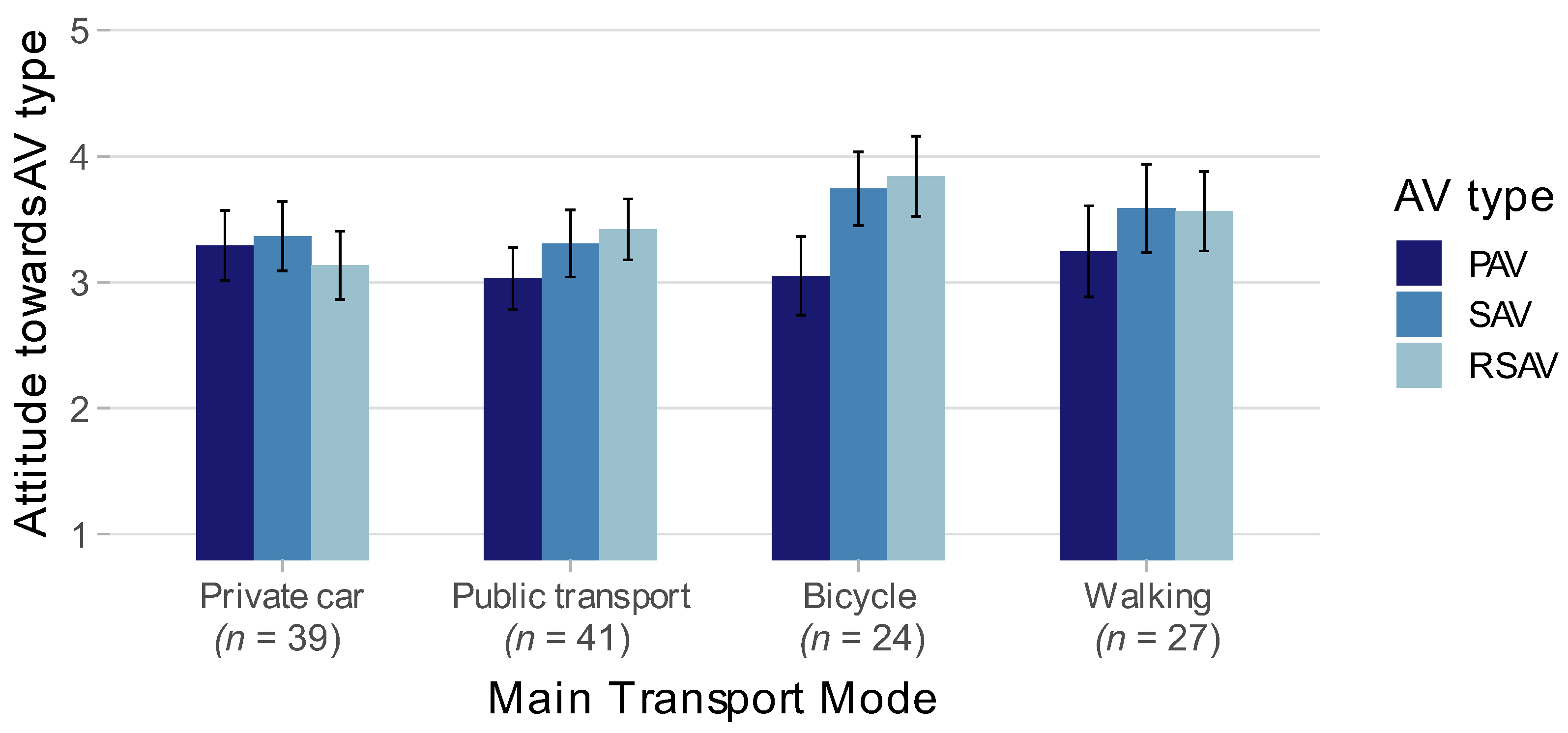
3.2. Attitudes towards Automated Vehicles (RQ1)
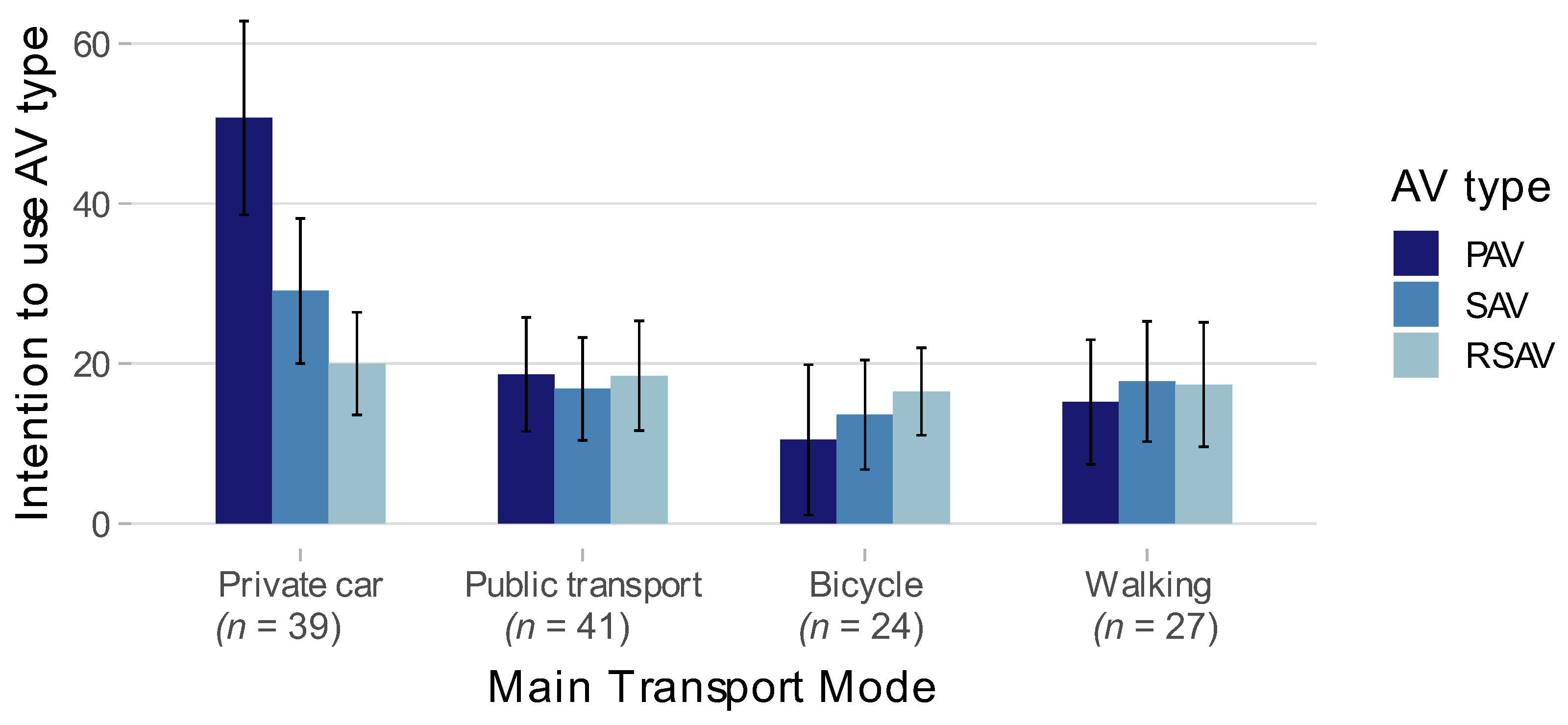
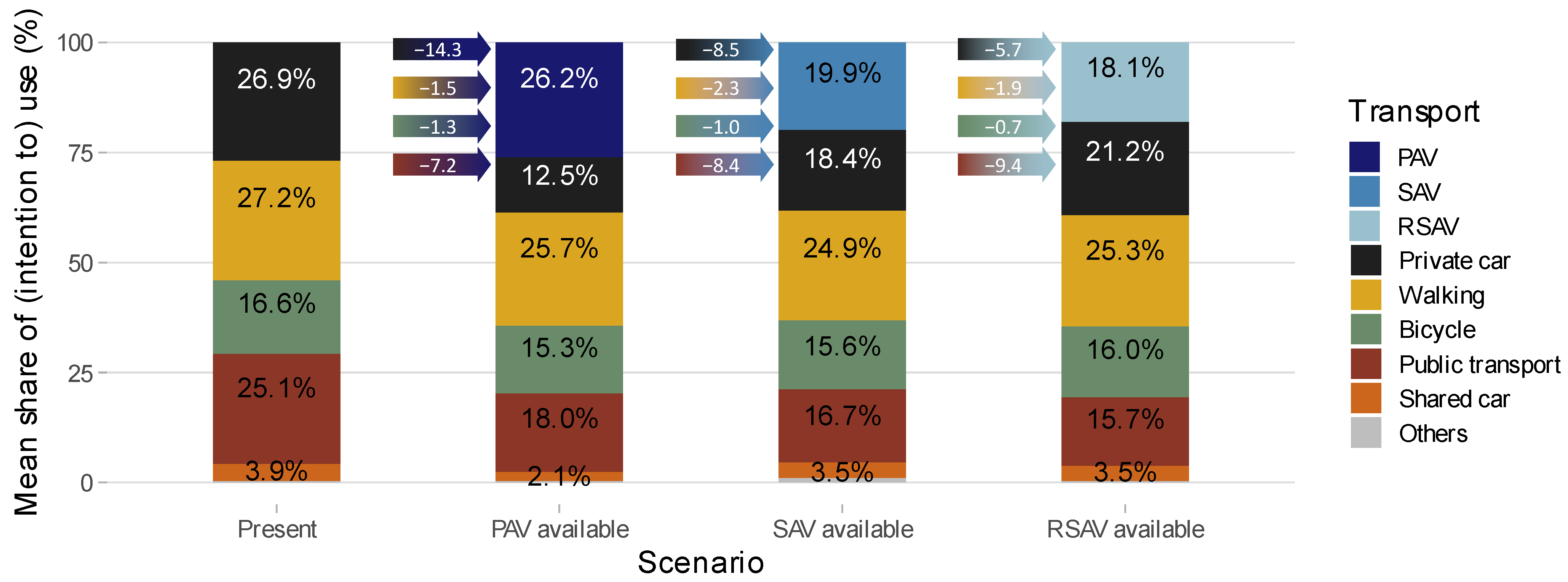
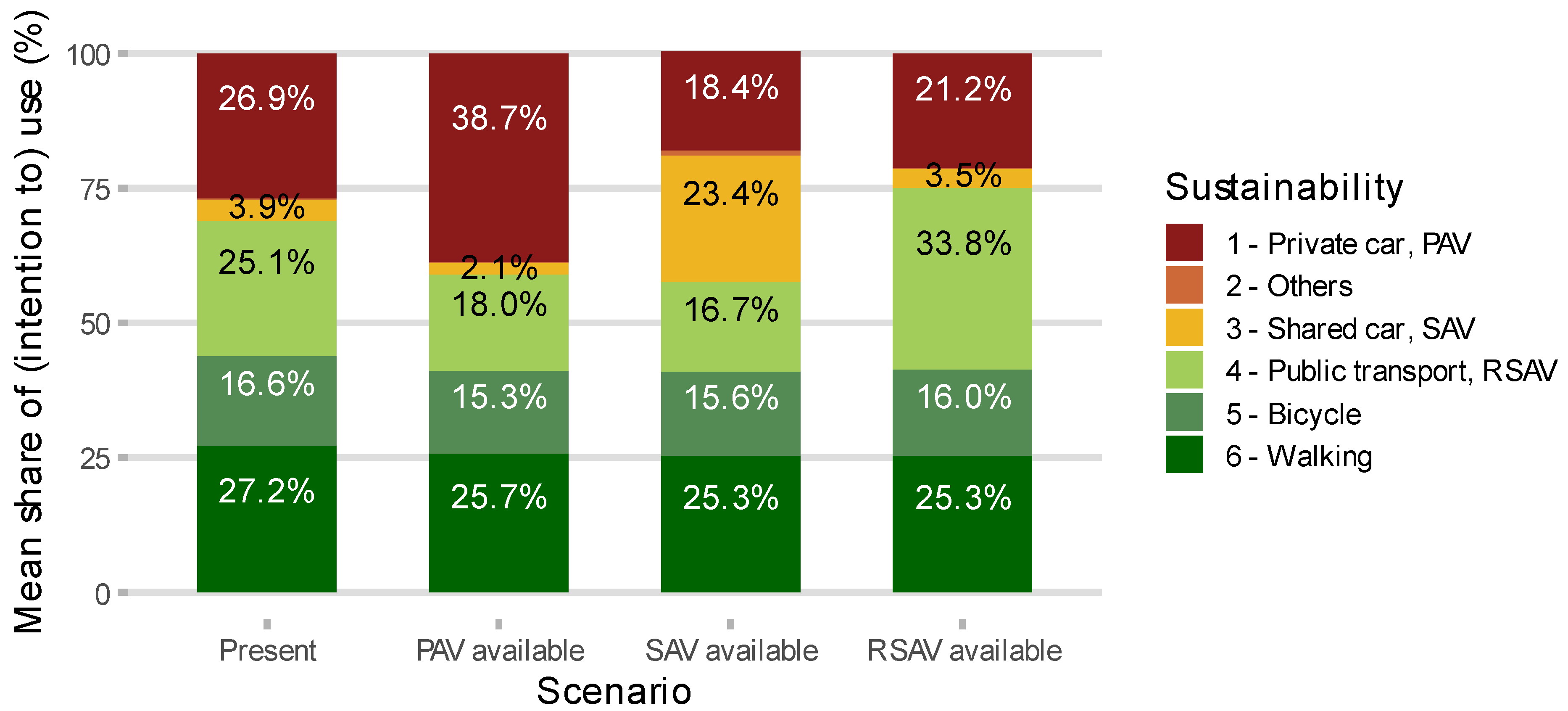
3.3. Expected Future Mode Choice (RQ2)
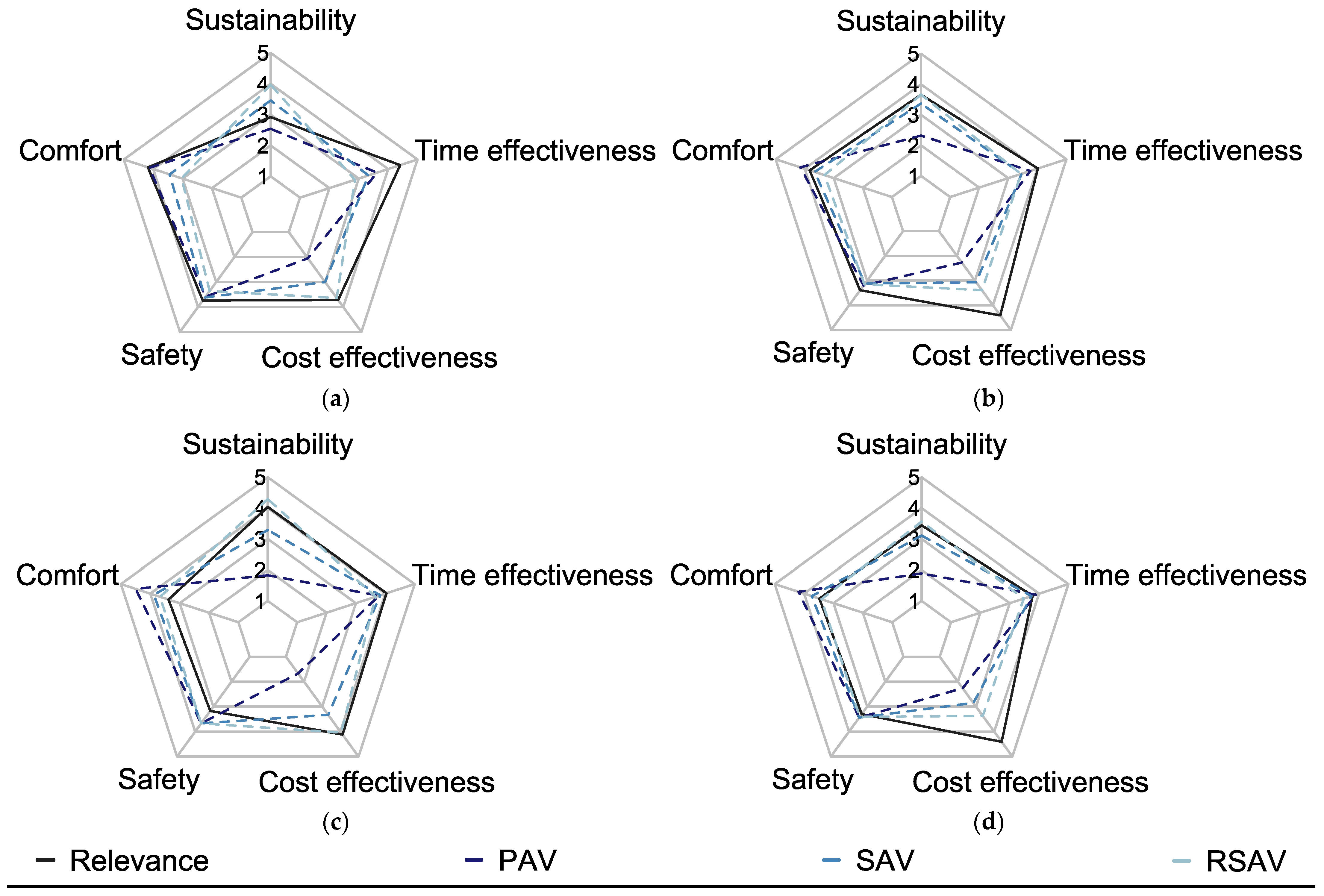
3.4. Fulfillment of Mobility Needs through Driving Automation (RQ3)
4. Discussion
4.1. Summary and Interpretation of Results
4.2. Limitations and Future Research
4.3. Practical Implications
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Item | Origin |
|---|---|---|
| Attitudes towards the three types of automated vehicles (PAV, SAV, RSAV) | The introduction of private/shared/ride-shared fully automated vehicles is a good idea. | Kostorz et al. (2019) [39] |
| Private/Shared/Ride-shared fully automated vehicles will play an important part of the transport system. | Kostorz et al. (2019) [39] | |
| Private/Shared/Ride-shared fully automated vehicles would make my everyday life easier. | Kostorz et al. (2019) [39] | |
| Driving a private/shared/ride-shared fully automated vehicle would be fun for me. | Kostorz et al. (2019) [39] | |
| Using a private/shared/ride-shared fully automated vehicle would satisfy my mobility needs. | Own | |
| Current and intended future mode choice | Please think of a typical week outside of pandemic-related restrictions (e.g., home office). What is the total number of trips you make in such a week? Please indicate how many of the above routes you cover by which mode of transport. | Own |
| Imagine if private/shared/ride-shared fully automated vehicles were fully operational. How do you think your transport mode choice would change if there was also the possibility to use private/shared/ride-shared fully automated vehicles safely? Please indicate how many of your trips in a typical week you imagine you would make and by which mode of transport. | Own | |
| Mobility needs | The environmental friendliness of a mode of transport influences my transport mode choice. | Cattaneo et al. (2018) [52] |
| The comfort of a mode of transport influences my transport mode choice. | Cattaneo et al. (2018) [52] | |
| The safety of a mode of transport influences my transport mode choice. | Cattaneo et al. (2018) [52] | |
| The costs associated with a mode of transport influence my transport mode choice. | Own | |
| The travel time associated with a mode of transport influences my transport mode choice. | Own | |
| Evaluation of the three types of automated vehicles in terms of their service attributes. | Private fully automated vehicles are an environmentally friendly way of getting around. | Own, following the items for mobility needs based on Cattaneo (2018) [52] |
| Private fully automated vehicles are a comfortable way of getting around. | ||
| Private fully automated vehicles are a safe way of getting around. | ||
| Private fully automated vehicles are a cheap way of getting around. | ||
| Private fully automated vehicles are a fast way of getting around. |
Appendix B
| Type of Automated Vehicle | Information |
|---|---|
| Automated driving in general | Automated driving is understood to mean a vehicle that can either partially or fully take over driving tasks. When the driving task is taken over completely, so-called fully automated driving, a driver is no longer necessary. Driver assistance systems are the preliminary stage to automated driving. They are already installed in many vehicles and take over selected completed parts of the driving task. Driver assistance systems are, for example, ASB & ESP, hill start assistants, distance control, (emergency) brake assistants, lane departure warning systems, turn-off assistants, drowsiness detection and similar systems. |
| Private automated vehicle (PAV) | Fully automated vehicles privately owned and available to the members of that private household (equivalent to conventional passenger cars)—i.e., you own a fully automated vehicle yourself that is available to you (and the members of your household) at all times. |
| Shared automated vehicle (SAV) | Fully automated vehicles owned by a municipality, community or company that can be booked e.g., via an app or by phone. They serve different passengers one after the other (equivalent to a taxi). There are no fixed stops, instead passengers are transported from door to door.—i.e., you book a fully automated vehicle as needed to pick you up from your starting point and take you to your desired destination. You are transported alone in the vehicle (plus any people you wish to take with you, if applicable). |
| Ride-shared automated vehicle (RSAV) | Fully automated vehicles owned by a community, municipality or company that can be booked e.g., via an app or by phone. They serve different passengers simultaneously by transporting passengers with similar origins & destinations together in one car (equivalent to a minibus). There are no fixed stops, instead strategic waypoints are selected where passengers can board. Care is taken to minimize the diversions and at the same time not to set the waypoints too far away from the starting point of the boarding passenger.—i.e., you book a fully automated vehicle that picks you up from a place close to your starting point (you can get there on foot or by bike, for example) and takes you to your desired destination. You are transported in the vehicle together with others (strangers) whose destinations are within a similar radius to yours. |
References
- Brooks, C.E.P. Geological and Historical Aspects of Climatic Change. In Compendium of Meteorology, 1st ed.; Malone, T.F., Ed.; American Meteorological Society: Boston, MA, USA, 1951; pp. 1004–1018. ISBN 978-1-940033-70-9. [Google Scholar]
- United Nations Paris Agreement; United Nations Treaty Collection. 2015. Available online: https://www.un.org/en/node/84376 (accessed on 26 November 2022).
- Statista. Global Climate Change; Statista: Hamburg, Germany, 2021; Available online: https://www.statista.com/study/10974/climate-change--statista-dossier/ (accessed on 26 November 2022).
- BMU. Klimaschutzplan 2050. Klimaschutzpolitische Grundsätze und Ziele der Bundesregierung, 2nd ed.; BMU: Berling, Germany, 2016. [Google Scholar]
- Statista. Klimawandel; Statista: Hamburg, Germany, 2020; Available online: https://de.statista.com/statistik/studie/id/41248/dokument/klimawandel/ (accessed on 26 November 2022).
- BMDV. Förderrichtlinie “Ein Zukunftsfähiges, Nachhaltiges Mobilitätssystem Durch Automatisiertes Fahren Und Vernetzung”; BMDV: Berlin, Germany, 2019.
- Mora, L.; Wu, X.; Panori, A. Mind the Gap: Developments in Autonomous Driving Research and the Sustainability Challenge. J. Clean. Prod. 2020, 275, 124087. [Google Scholar] [CrossRef]
- Williams, E.; Das, V.; Fisher, A. Assessing the Sustainability Implications of Autonomous Vehicles: Recommendations for Research Community Practice. Sustainability 2020, 12, 1902. [Google Scholar] [CrossRef] [Green Version]
- SAE International. Surface Vehicle Recommended Practice: (R) Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles, 1st ed.; SAE: Warrendale, PA, USA; Zürich, Switzerland, 2021; Available online: https://www.sae.org/standards/content/j3016_202104/ (accessed on 26 November 2022).
- Kyriakidis, M.; de Winter, J.C.F.; Stanton, N.; Bellet, T.; van Arem, B.; Brookhuis, K.; Martens, M.H.; Bengler, K.; Andersson, J.; Merat, N.; et al. A Human Factors Perspective on Automated Driving. Theor. Issues Ergon. Sci. 2019, 20, 223–249. [Google Scholar] [CrossRef]
- Hartwich, F.; Schmidt, C.; Gräfing, D.; Krems, J.F. In the Passenger Seat: Differences in the Perception of Human vs. Automated Vehicle Control and Resulting HMI Demands of Users. In HCI in Mobility, Transport, and Automotive Systems. Automated Driving and In-Vehicle Experience Design; Krömker, H., Ed.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2020; Volume 12212, pp. 31–45. ISBN 978-3-030-50522-6. [Google Scholar]
- Strauch, C.; Mühl, K.; Patro, K.; Grabmaier, C.; Reithinger, S.; Baumann, M.; Huckauf, A. Real Autonomous Driving from a Passenger’s Perspective: Two Experimental Investigations Using Gaze Behaviour and Trust Ratings in Field and Simulator. Transp. Res. Part F Traffic Psychol. Behav. 2019, 66, 15–28. [Google Scholar] [CrossRef]
- Elbanhawi, M.; Simic, M.; Jazar, R. In the Passenger Seat: Investigating Ride Comfort Measures in Autonomous Cars. IEEE Intell. Transp. Syst. Mag. 2015, 7, 4–17. [Google Scholar] [CrossRef]
- Hartwich, F.; Beggiato, M.; Krems, J.F. Driving Comfort, Enjoyment and Acceptance of Automated Driving—Effects of Drivers’ Age and Driving Style Familiarity. Ergonomics 2018, 61, 1017–1032. [Google Scholar] [CrossRef]
- Beggiato, M.; Hartwich, F.; Roßner, P.; Dettmann, A.; Enhuber, S.; Pech, T.; Gesmann-Nuissl, D.; Mößner, K.; Bullinger, A.C.; Krems, J. KomfoPilot—Comfortable Automated Driving. In Smart Automotive Mobility; Meixner, G., Ed.; Human–Computer Interaction Series; Springer International Publishing: Cham, Switzerland, 2020; pp. 71–154. ISBN 978-3-030-45130-1. [Google Scholar]
- Hartwich, F.; Hollander, C.; Johannmeyer, D.; Krems, J.F. Improving Passenger Experience and Trust in Automated Vehicles through User-Adaptive HMIs: “The More the Better” Does Not Apply to Everyone. Front. Hum. Dyn. 2021, 3, 669030. [Google Scholar] [CrossRef]
- Wintersberger, P.; Frison, A.-K.; Riener, A.; Sawitzky, T. von Fostering User Acceptance and Trust in Fully Automated Vehicles: Evaluating the Potential of Augmented Reality. Presence Teleoper. Virtual Environ. 2018, 27, 46–62. [Google Scholar] [CrossRef]
- Hensch, A.-C.; Kreißig, I.; Beggiato, M.; Krems, J.F. The Effect of EHMI Malfunctions on Younger and Elderly Pedestrians’ Trust and Acceptance of Automated Vehicle Communication Signals. Front. Psychol. 2022, 13, 866475. [Google Scholar] [CrossRef]
- Hensch, A.-C.; Neumann, I.; Beggiato, M.; Halama, J.; Krems, J.F. Effects of a Light-Based Communication Approach as an External HMI for Automated Vehicles—A Wizard-of-Oz Study. ToTS 2020, 10, 18–32. [Google Scholar] [CrossRef] [Green Version]
- Harb, M.; Stathopoulos, A.; Shiftan, Y.; Walker, J.L. What Do We (Not) Know about Our Future with Automated Vehicles? Transp. Res. Part C Emerg. Technol. 2021, 123, 102948. [Google Scholar] [CrossRef]
- Pakusch, C. Technology Assessment of Autonomous Driving—Are Shared Autonomous Vehicles Ecologically and Socially Sustainable? Ph.D. Dissertation, Universität Siegen, Siegen, Germany, 2020. [Google Scholar]
- Stocker, A.; Shaheen, S. Shared Automated Vehicles: Review of Business Models; International Transport Forum Discussion Paper; Organisation for Economic Co-Operation and Development (OECD): Paris, France, 2017; Volume 9. [Google Scholar]
- Igliński, H.; Babiak, M. Analysis of the Potential of Autonomous Vehicles in Reducing the Emissions of Greenhouse Gases in Road Transport. Procedia Eng. 2017, 192, 353–358. [Google Scholar] [CrossRef]
- Taiebat, M.; Brown, A.L.; Safford, H.R.; Qu, S.; Xu, M. A Review on Energy, Environmental, and Sustainability Implications of Connected and Automated Vehicles. Environ. Sci. Technol. 2018, 52, 11449–11465. [Google Scholar] [CrossRef]
- Wadud, Z.; MacKenzie, D.; Leiby, P. Help or Hindrance? The Travel, Energy and Carbon Impacts of Highly Automated Vehicles. Transp. Res. Part A Policy Pract. 2016, 86, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Fox-Penner, P.; Gorman, W.; Hatch, J. Long-Term U.S Transportation Electricity Use Considering the Effect of Autonomous-Vehicles: Estimates & Policy Observations. Energy Policy 2018, 122, 203–213. [Google Scholar] [CrossRef]
- Fulton, L.; Kothawala, A.; Compostella, J. Estimating the Costs of New Mobility Travel Options: Monetary and Non-Monetary Factors; The National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 2021. [Google Scholar] [CrossRef]
- Vleugel, J.M.; Bal, F. More Space and Improved Living Conditions in Cities with Autonomous Vehicles. Int. J. Des. Nat. Ecodyn. 2018, 12, 505–515. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K.M. The Travel and Environmental Implications of Shared Autonomous Vehicles, Using Agent-Based Model Scenarios. Transp. Res. Part C Emerg. Technol. 2014, 40, 1–13. [Google Scholar] [CrossRef]
- Porter, L.; Stone, J.; Legacy, C.; Curtis, C.; Harris, J.; Fishman, E.; Kent, J.; Marsden, G.; Reardon, L.; Stilgoe, J. The Autonomous Vehicle Revolution: Implications for Planning/The Driverless City?/Autonomous Vehicles—A Planner’s Response/Autonomous Vehicles: Opportunities, Challenges and the Need for Government Action/Three Signs Autonomous Vehicles Will Not Lead to Less Car Ownership and Less Car Use in Car Dependent Cities—A Case Study of Sydney, Australia/Planning for Autonomous Vehicles? Questions of Purpose, Place and Pace/Ensuring Good Governance: The Role of Planners in the Development of Autonomous Vehicles/Putting Technology in Its Place. Plan. Theory Pract. 2018, 19, 753–778. [Google Scholar] [CrossRef]
- Gruel, W.; Stanford, J.M. Assessing the Long-Term Effects of Autonomous Vehicles: A Speculative Approach. Transp. Res. Procedia 2016, 13, 18–29. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.H.; Mokhtarian, P.L.; Circella, G. How, and for Whom, Will Activity Patterns Be Modified by Self-Driving Cars? Expectations from the State of Georgia. Transp. Res. Part F Traffic Psychol. Behav. 2020, 70, 68–80. [Google Scholar] [CrossRef]
- Haboucha, C.J.; Ishaq, R.; Shiftan, Y. User Preferences Regarding Autonomous Vehicles. Transp. Res. Part C Emerg. Technol. 2017, 78, 37–49. [Google Scholar] [CrossRef]
- Martin, G. An Ecosocial Frame for Autonomous Vehicles. Capital. Nat. Social. 2019, 30, 55–70. [Google Scholar] [CrossRef]
- Pakusch, C.; Stevens, G.; Boden, A.; Bossauer, P. Unintended Effects of Autonomous Driving: A Study on Mobility Preferences in the Future. Sustainability 2018, 10, 2404. [Google Scholar] [CrossRef] [Green Version]
- Nobis, C.; Kuhnimhof, T. Mobilität in Deutschland—MiD Ergebnisbericht. Studie von Infas, DLR, IVT Und Infas 360 Im Auftrag Des Bundesministers Für Verkehr Und Digitale Infrastruktur (FE-Nr. 70.904/15); MiD: Bonn Germany, 2019; Available online: http://www.mobilitaet-in-deutschland.de/publikationen2017.html (accessed on 26 November 2022).
- AUDI AG. The Pulse of Autonomous Driving; AUDI AG: Ingolstadt, Germany, 2019; Available online: https://www.audi-mediacenter.com/de/publikationen/weitere/the-pulse-of-autonomous-driving-langversion-842 (accessed on 26 November 2022).
- König, M.; Neumayr, L. Users’ Resistance towards Radical Innovations: The Case of the Self-Driving Car. Transp. Res. Part F Traffic Psychol. Behav. 2017, 44, 42–52. [Google Scholar] [CrossRef]
- Kostorz, N.; Hilgert, T.; Kagerbauer, M. Automatisierte Kleinbusse Im Öffentlichen Personennahverkehr—Akzeptanz Und Nutzungsintentionen in Deutschland. JMV 2019, 2, 23–32. [Google Scholar] [CrossRef]
- Winter, K.; Cats, O.; Martens, K.; van Arem, B. Identifying User Classes for Shared and Automated Mobility Services. Eur. Transp. Res. Rev. 2020, 12, 36. [Google Scholar] [CrossRef]
- Krueger, R.; Rashidi, T.H.; Rose, J.M. Preferences for Shared Autonomous Vehicles. Transp. Res. Part C Emerg. Technol. 2016, 69, 343–355. [Google Scholar] [CrossRef]
- Pakusch, C.; Stevens, G.; Bossauer, P. Shared Autonomous Vehicles: Potentials for a Sustainable Mobility and Risks of Unintended Effects. EPiC Ser. Comput. 2018, 52, 258–269. [Google Scholar]
- Dias, F.F.; Lavieri, P.S.; Garikapati, V.M.; Astroza, S.; Pendyala, R.M.; Bhat, C.R. A Behavioral Choice Model of the Use of Car-Sharing and Ride-Sourcing Services. Transportation 2017, 44, 1307–1323. [Google Scholar] [CrossRef]
- Chee, P.N.E.; Susilo, Y.O.; Wong, Y.D. Determinants of Intention-to-Use First-/Last-Mile Automated Bus Service. Transp. Res. Part A Policy Pract. 2020, 139, 350–375. [Google Scholar] [CrossRef]
- Shabanpour, R.; Golshani, N.; Shamshiripour, A.; Mohammadian, A. Eliciting Preferences for Adoption of Fully Automated Vehicles Using Best-Worst Analysis. Transp. Res. Part C Emerg. Technol. 2018, 93, 463–478. [Google Scholar] [CrossRef]
- Lavieri, P.S.; Garikapati, V.M.; Bhat, C.R.; Pendyala, R.M.; Astroza, S.; Dias, F.F. Modeling Individual Preferences for Ownership and Sharing of Autonomous Vehicle Technologies. Transp. Res. Rec. 2017, 2665, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Bernhard, C.; Oberfeld, D.; Hoffmann, C.; Weismüller, D.; Hecht, H. User Acceptance of Automated Public Transport. Transp. Res. Part F Traffic Psychol. Behav. 2020, 70, 109–123. [Google Scholar] [CrossRef]
- Kaye, S.-A.; Lewis, I.; Buckley, L.; Gauld, C.; Rakotonirainy, A. To Share or Not to Share: A Theoretically Guided Investigation of Factors Predicting Intentions to Use Fully Automated Shared Passenger Shuttles. Transp. Res. Part F Traffic Psychol. Behav. 2020, 75, 203–213. [Google Scholar] [CrossRef]
- Lavieri, P.S.; Bhat, C.R. Modeling Individuals’ Willingness to Share Trips with Strangers in an Autonomous Vehicle Future. Transp. Res. Part A Policy Pract. 2019, 124, 242–261. [Google Scholar] [CrossRef]
- Barbour, N.; Menon, N.; Zhang, Y.; Mannering, F. Shared Automated Vehicles: A Statistical Analysis of Consumer Use Likelihoods and Concerns. Transp. Policy 2019, 80, 86–93. [Google Scholar] [CrossRef]
- Behren, S.; Minster, C.; Magdolen, M.; Chlond, B.; Hunecke, M.; Vortisch, P. Bringing Travel Behavior and Attitudes Together: An Integrated Survey Approach for Clustering Urban Mobility Types. In Proceedings of the TRB 97th Annual Meeting Compendium of Papers, Washington, WA, USA, 7–11 January 2018; Volume 22. [Google Scholar]
- Cattaneo, M.; Malighetti, P.; Morlotti, C.; Paleari, S. Students’ Mobility Attitudes and Sustainable Transport Mode Choice. IJSHE 2018, 19, 942–962. [Google Scholar] [CrossRef]
- Acheampong, R.A.; Cugurullo, F. Capturing the Behavioural Determinants behind the Adoption of Autonomous Vehicles: Conceptual Frameworks and Measurement Models to Predict Public Transport, Sharing and Ownership Trends of Self-Driving Cars. Transp. Res. Part F Traffic Psychol. Behav. 2019, 62, 349–375. [Google Scholar] [CrossRef] [Green Version]
- Bamberg, S.; Ajzen, I.; Schmidt, P. Choice of Travel Mode in the Theory of Planned Behavior: The Roles of Past Behavior, Habit, and Reasoned Action. Basic Appl. Soc. Psychol. 2003, 25, 175–187. [Google Scholar] [CrossRef]
- Billows, G.; McNeill, L. Consumer Attitude and Behavioral Intention toward Collaborative Consumption of Shared Services. Sustainability 2018, 10, 4468. [Google Scholar] [CrossRef] [Green Version]
- Kuppam, A.R.; Pendyala, R.M.; Rahman, S. Analysis of the Role of Traveler Attitudes and Perceptions in Explaining Mode-Choice Behavior. Transp. Res. Rec. 1999, 1676, 68–76. [Google Scholar] [CrossRef]
- Rahimi, A.; Azimi, G.; Jin, X. Examining Human Attitudes toward Shared Mobility Options and Autonomous Vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2020, 72, 133–154. [Google Scholar] [CrossRef]
- Bai, T.; Li, X.; Sun, Z. Effects of Cost Adjustment on Travel Mode Choice: Analysis and Comparison of Different Logit Models. Transp. Res. Procedia 2017, 25, 2649–2659. [Google Scholar] [CrossRef]
- Ha, J.; Lee, S.; Ko, J. Unraveling the Impact of Travel Time, Cost, and Transit Burdens on Commute Mode Choice for Different Income and Age Groups. Transp. Res. Part A Policy Pract. 2020, 141, 147–166. [Google Scholar] [CrossRef]
- Ye, M.; Zeng, S.; Yang, G.; Chen, Y. Identification of Contributing Factors on Travel Mode Choice among Different Resident Types with Bike-sharing as an Alternative. IET Intell. Transp. Syst. 2020, 14, 639–646. [Google Scholar] [CrossRef]
- IBM Corp. IBM SPSS Statistics for Windows, Version 29.0; IBM Corp.: Armonk, NY, USA, 2022. [Google Scholar]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2021; Available online: https://www.R-project.org/ (accessed on 11 October 2022).
- RStudio Team. RStudio: Integrated Development for R; RStudio (Now Posit): Boston, MA, USA, 2021; Available online: http://www.rstudio.com/ (accessed on 11 October 2022).
- Ye, J.; Chen, J.; Bai, H.; Yue, Y. Analyzing Transfer Commuting Attitudes Using a Market Segmentation Approach. Sustainability 2018, 10, 2194. [Google Scholar] [CrossRef] [Green Version]
- Andrei, L.; Luca, O.; Gaman, F. Insights from User Preferences on Automated Vehicles: Influence of Socio-Demographic Factors on Value of Time in Romania Case. Sustainability 2022, 14, 10828. [Google Scholar] [CrossRef]
- Oxley, J.; Logan, D.B.; Coxon, S.; Koppel, S. Understanding Current and Future Transport Needs of Older Australian Drivers to Guide Development of Sustainable and Smart Initiatives to Support Safe Mobility of Older Adults. Sustainability 2022, 14, 5906. [Google Scholar] [CrossRef]
- Klöckner, C.A. A Comprehensive Model of the Psychology of Environmental Behaviour—A Meta-Analysis. Glob. Environ. Chang. 2013, 23, 1028–1038. [Google Scholar] [CrossRef] [Green Version]
- Armitage, C.J.; Conner, M. Efficacy of the Theory of Planned Behaviour: A Meta-Analytic Review. Br. J. Soc. Psychol. 2001, 40, 471–499. [Google Scholar] [CrossRef] [Green Version]
- Sheeran, P.; Webb, T.L. The Intention-Behavior Gap: The Intention-Behavior Gap. Soc. Personal. Psychol. Compass 2016, 10, 503–518. [Google Scholar] [CrossRef]
- Hartwich, F.; Witzlack, C.; Beggiato, M.; Krems, J.F. The First Impression Counts—A Combined Driving Simulator and Test Track Study on the Development of Trust and Acceptance of Highly Automated Driving. Transp. Res. Part F Traffic Psychol. Behav. 2019, 65, 522–535. [Google Scholar] [CrossRef]
- Parasuraman, R.; Riley, V. Humans and Automation: Use, Misuse, Disuse, Abuse. Hum. Factors 1997, 39, 230–253. [Google Scholar] [CrossRef]
- Lee, J.D.; See, K.A. Trust in Automation: Designing for Appropriate Reliance. Hum. Factors J. Hum. Factors Ergon. Soc. 2004, 46, 50–80. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Choi, J.K.; Ji, Y.G. Investigating the Importance of Trust on Adopting an Autonomous Vehicle. Int. J. Hum.-Comput. Interact. 2015, 31, 692–702. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, K.; Min, H.; Wang, Z.; Zhao, X.; Liu, P. What Drives People to Accept Automated Vehicles? Findings from a Field Experiment. Transp. Res. Part C Emerg. Technol. 2018, 95, 320–334. [Google Scholar] [CrossRef]
- Cacilo, A.; Haag, M. Beschäftigungswirkungen der Fahrzeugdigitalisierung. Wirkungen der Digitalisierung und Fahrzeugautomatisierung auf Wertschöpfung und Beschäftigung; Hans-Böckler-Stiftung: Düsseldorf, Germany, 2018. [Google Scholar]
| Mode of Transport | Ecological Sustainability | Corresponding AV Type |
|---|---|---|
| Walking | 6 | |
| Bicycle/E-Bike | 5 | |
| Public transport/ Ride-sharing | 4 | Ride-shared automated vehicle (RSAV) |
| Car-sharing | 3 | Shared automated vehicle (SAV) |
| Taxi | 2 | |
| Private car | 1 | Private automated vehicle (PAV) |
| Sample Attribute | Survey Sample (n = 136) | ”Mobility in Germany” Sample (n = 316.361) |
|---|---|---|
| Mean age in years | 26.1 | 43.6 |
| Gender (share of females) | 76.5% | 50.7% |
| Prevalent education degree | High school (52.9%) | Secondary school (25.0%) |
| Prevalent occupation | Student (69.9%) | Full-time employee (33.1%) |
| Share of participants holding driver’s license | 93.4% | Only car: 86.6% |
| Sample Attribute | Survey Sample (n = 136) | “Mobility in Germany” Sample (n = 316.361) |
|---|---|---|
| Mean trips per week/person | 21.2 | 21.7 |
| Modal split: trips by car | 26.9% | 57% |
| Modal split: trips by public transport | 25.1% | 10% |
| Modal split: trips by bicycle | 16.6% | 11% |
| Modal split: trips by walking | 27.2% | 22% |
| Main Mode of Transport | n | Mean Age (SD) | Gender: Share of Females | Prevalent Occupation |
|---|---|---|---|---|
| Walking | 27 | 25.4 (5.3) | 81.5% | Student (81.5%) |
| Bicycle/E-Bike | 24 | 28.7 (7.8) | 70.8% | Student (50.0%) |
| Public transport/Ride-sharing | 41 | 22.3 (3.8) | 80.5% | Student (95.1%) |
| Private car | 39 | 29.3 (10.1) | 71.8% | Student (46.2%) |
| Car-sharing | 4 | 25.5 (6.1) | 75.0% | Student (75.0%) |
| Others | 1 | 19.0 (n.a.) | 100.0% | Student (100.0%) |
| All | 136 | 26.1 | 76.5% | Student (69.9%) |
| Need | Effect | df | F | p | ηp2 |
|---|---|---|---|---|---|
| environmental friendliness | AV mode | (1.80, 228.33) | 222.97 | <0.001 *** | 0.64 |
| T mode | (3, 127) | 1.98 | 0.120 | 0.05 | |
| AV mode × T mode | (5.39, 228.33) | 4.37 | <0.001 *** | 0.10 | |
| time effectiveness | AV mode | (1.70, 216.22) | 11.62 | <0.001 *** | 0.09 |
| T mode | (3, 127) | 2.86 | 0.04 * | 0.06 | |
| AV mode × T mode | (5.11, 216.22) | 1.64 | 0.148 | 0.04 | |
| cost effectiveness | AV mode | (1.83, 231.98) | 187.56 | <0.001 *** | 0.60 |
| T mode | (3, 127) | 0.25 | 0.862 | 0.01 | |
| AV mode × T mode | (5.48, 231.98) | 6.56 | <0.001 *** | 0.13 | |
| safety | AV mode | (1.64, 207.98) | 1.14 | 0.313 | 0.01 |
| T mode | (3, 127) | 2.19 | 0.094 | 0.05 | |
| AV mode × T mode | (4.91, 207.98) | 0.90 | 0.484 | 0.02 | |
| comfort | AV mode | (1.84, 233.93) | 53.92 | <0.001 *** | 0.30 |
| T mode | (3, 127) | 2.14 | 0.099 | 0.05 | |
| AV mode × T mode | (5.53, 233.93) | 0.51 | 0.784 | 0.01 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Heubeck, L.; Hartwich, F.; Bocklisch, F. To Share or Not to Share—Expected Transportation Mode Changes Given Different Types of Fully Automated Vehicles. Sustainability 2023, 15, 5056. https://doi.org/10.3390/su15065056
Heubeck L, Hartwich F, Bocklisch F. To Share or Not to Share—Expected Transportation Mode Changes Given Different Types of Fully Automated Vehicles. Sustainability. 2023; 15(6):5056. https://doi.org/10.3390/su15065056
Chicago/Turabian StyleHeubeck, Laura, Franziska Hartwich, and Franziska Bocklisch. 2023. "To Share or Not to Share—Expected Transportation Mode Changes Given Different Types of Fully Automated Vehicles" Sustainability 15, no. 6: 5056. https://doi.org/10.3390/su15065056