1. Introduction
Automated Container Terminal (ACT), with the automated container handling process in quayside loading and discharging, horizontal movement and yard storage, becomes an inevitable tendency of future port development due to its advantages in reducing handling costs, improving operational efficiency, and prompting its reputation of green performance [
1,
2] Port of Rotterdam, Hamburg and several other leading hubs played a leading role in developing ACT since the 1990s. Over the past decades, continuous effort has been given to the tradeoff between capital costs of automation facilities and terminal overall performance, while the application of autonomous driving technology on the container horizontal transportation, or even a wider freight transportation system, serves as a pioneer example in leading this tendency [
3].
Traditionally, Automated Guided Vehicles (AGV) have been widely deployed in many large container terminals worldwide due to their advantages in increased safety, productivity and significant labor cost savings [
4], and even more environmental benefits if they use eco-friendly technology such as battery energy driven [
5,
6]. On the other hand, driving automation technology becomes more mature and attractive [
7] evidenced by a number of literatures for its contribution in transport safety [
8,
9], driving experience [
10], traffic efficiency [
11], and economic achievement [
12]. The electricity-powered driverless trucks (DET), when comparing with traditional AGV, are able maintain similar advantages but with far less initial capital requirement and there is no need to bury transponders (also known as magnetic nails) underneath road surface in advance [
13]. It means that the DET, by taking its advantages in navigation and positioning technology, will have more flexibility to fit for different shape and layout of terminal infrastructures, which is particularly helpful when converting manual horizontal container movement to the automated one [
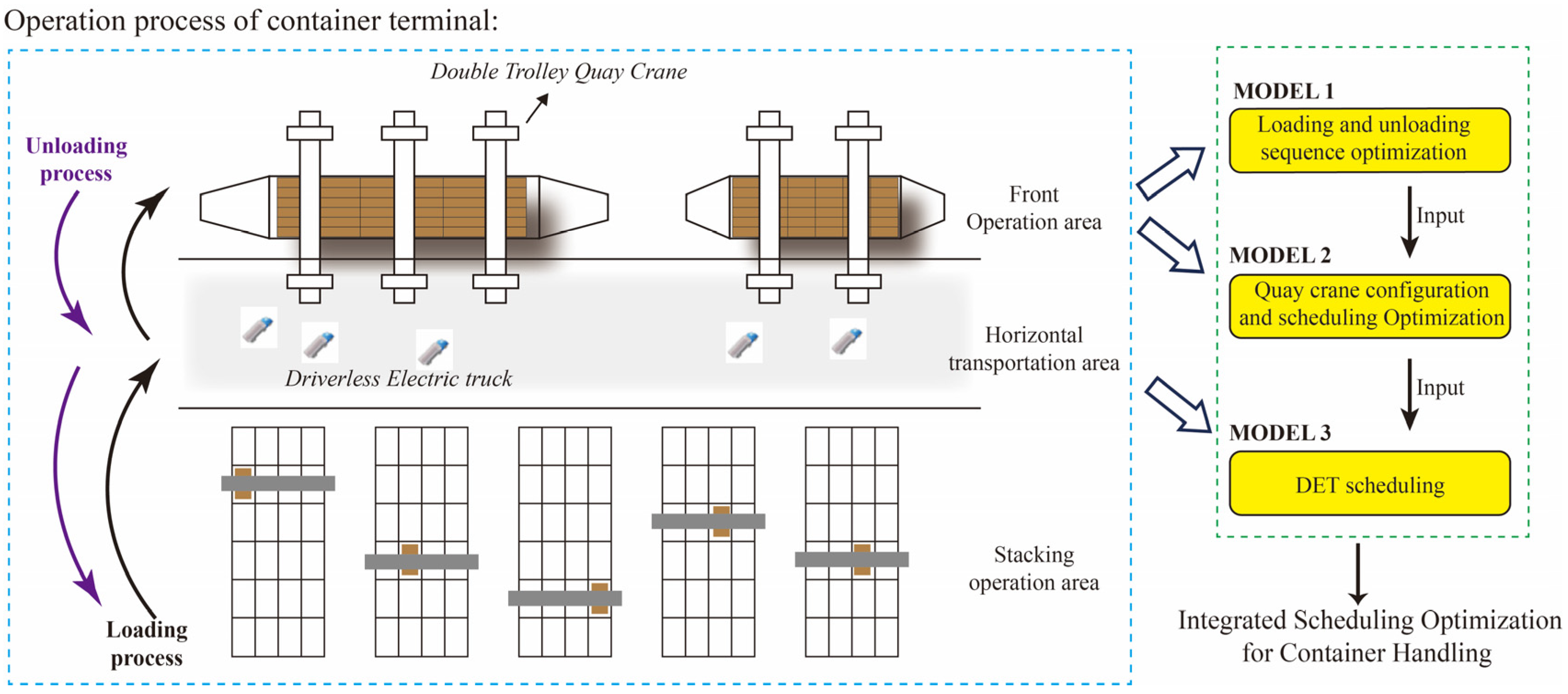
14]. As a result, a form of “Double Trolley Quay Crane (DTQC) + Driverless Electric Truck (DET) + Automatic Rail Mounted Gantry (ARMG)” system becomes popular in most recent terminal automation projects such as the port of Zhuhai (2018), Rotterdam’s Maasvlakets (2019), Ningbo (2020) and Tianjin (2022). However, the resource allocation and scheduling of such handling system require coordination among different components, to improve the overall operating performance, which becomes an optimization problem. Such optimization makes sense because nowadays with the development of Automated Container Terminal, the automatic decision about the operation plan in the port becomes more and more important. This work provides a convenient tool for the container handling plan, which is helpful to improve the efficiency of the port operation.
There has been abundant research made on the configuration and scheduling of various types of equipment in the terminal, no matter the traditional manual operation or in automated format. Jia et al. [
15] studied a vessel traffic scheduling problem considering the inter-shipping line equity issue. Considering the uncertainty of the service times of feeders, Jia et al. [
16] studied the problem of how to allocate berths to deep-sea vessels and schedule arrivals of feeders for congestion mitigation at a container port. Kim and Park [
17] investigated the quay crane resource allocation issues by considering the minimum safety distance requirement and the task priorities of loading and discharging. Bierwirth and Meisel [
18] emphasized the interference constraints between quay cranes in the scheduling model, while Zhang et al. [
19] optimized the quay crane dispatching by paying attention to the longitudinal stability of the ship during loading and unloading. In regard to the optimization of the quay crane operation, Goodchild and Daganzo [
20,
21], Zeng et al. [
22], Zhang and Han [
23] adopted the synchronous loading and unloading operation mode for developing the quay crane configuration and scheduling model, which aimed to minimize the quay crane operation time and improve efficiency through optimizing the loading and unloading sequence of container vessels.
Attention has also been given to the horizontal movement of containers connecting the quayside and storage yard in recent years. For example, in regard to the scheduling of horizontal movement activities, Legato et al. [
24] firstly addressed the potential impact of the inconsistency of the quay crane loading and discharging; Ma and Hu [
25] noticed the uncertainty caused by traffic congestion in the container storage yard; Zhang et al. [
26] suggested to take into account the Automated Guided Vehicle (AGV) endurance; additionally, Adamo et al. [
27] further added the varying speeds of AGVs in each path as another influential factor. Most recently, Hu [
28] constructed an AGV configuration and scheduling model with the pool strategy to maximize the utilization of AGV. Liu and Ge [
29] investigated the quay crane assignment issues from the perspective of minimizing CO2 emission during an unloading process of containers from quay cranes to AGVs. Their research finding suggested a positive correlation between quay crane resources and horizontal movement vehicles that the optimal number of quay cranes increases with the expected arrival rate of AGVs.
As stated by He et al. [
30] that the scheduling of quay cranes and AGVs are actually two highly related production decision-making issues during the process of loading and unloading operations. The former determines the operating time of ships, while the latter affects the loading/unloading time of the quay cranes and automatic rail mounted gantry. As a result, more and more scholars shift their attention to the coordinated scheduling of various equipment in the terminal operations. Kizilay et al. [
31] established the safety distance and interference constraint model for joint optimization of quay crane allocation and scheduling, yard crane allocation and scheduling, yard location allocation and yard truck allocation and scheduling, so as to minimize the rotation time of ships and improve the throughput of the terminal. Peng et al. [
32] quantified the impact of equipment configuration on the total carbon emissions in terminal operations, established a simulation model based on a complex queuing network, and thereby optimized the ratio of the quay crane, yard crane and AGV. [
33,
34,
35,
36,
37] studied the collaboration optimization of the berth allocation and quay crane scheduling problem. Yin et al. [
38] studied the quay cranes and shuttle vehicles simultaneous scheduling problem considering limited apron buffer capacity. Cahyono et al. [
39] studied the simultaneous allocation and scheduling of quay cranes, yard cranes, and trucks in dynamical integrated container terminal operations. Çağatay Iris et al. [
40,
41,
42] presented the flexible containership loading problem for seaport container terminals, in which the integrated management of ship loading operations, including operational stowage planning, load sequencing, planning of the equipment to use and their scheduling, is addressed. Gao and Ge [
43] studied a multiple yard crane scheduling problem, aiming to minimize both total longitudinal distance of yard cranes and total waiting time of internal and external trucks.
The existing literatures provide a concrete theoretical foundation for optimized allocation of terminal resources which, in consequence, lead to significant improvement of container terminal productivity and efficiency. However, as mentioned earlier, DET exhibits a completely different operational features to traditional AGV or manual truck mode due its significant saving of initial investment, great flexibility in moving paths and decoupling operation in storage yard. In addition, in relation to the operation and scheduling of container handling system, currently, the integrated scheduling of the overall container handling system which consists of vertical loading and discharging, and the horizontal movement has not been detailed discussed yet, but such an operation mode is more advanced and has a wide application prospect in ACTs.
Therefore, this work intends to make some improvements related to the abovementioned issues. An integrated operation mode, “Double Trolley Quay Crane (DTQC) + Driverless Electric Truck (DET)” is taken into account, in which synchronous loading and unloading operation mode is used to dispatch quay crane, and the pool strategy is used to dispatch DET to respond to the transportation service demand of the quay crane and yard crane, so as to achieve higher service quality with less equipment resources. Operationally, DET will be utilized to replace the traditional container truck or AGV. Focusing on this mode, the corresponding integrated optimization model is developed, aiming at optimizing the scheduling of the overall container handling system. By doing so, an integrated resource allocation strategy could be obtained to support the operation of the recently developed container terminal automation projects and future designs.
This work has two aspects of contributions: first, an integrated scheduling optimization model for the DTQC-DET system is proposed, providing an effective tool of synthetical plan for the operation in ACT. Second, the Driverless Electric Truck is considered and compared with traditional transportation mediums, indicating its potential of the application in ACT.
The remaining of this paper is organized as follows:
Section 2 clarifies the problem and figures out the structure of how to solve the problem.
Section 3 develops three optimized models for (1) container loading and discharging sequence; (2) quayside cranes allocation and scheduling; and (3) horizontal container movement vehicle allocation and scheduling, which consists of the process of ACT operations. The effectiveness of these models are validated in
Section 4 with the application of an example case. In addition, a further comparison between DET and the traditional horizontal transport vehicles (i.e., AGV and manual driving diesel truck) is made to investigate the operational and economical features of DET. Finally, conclusions are drawn in
Section 5.
4. Example Application and Analysis
4.1. Task Description
There are 10 bays on the container ship, as shown in
Figure 2. The number of containers that can be placed in each bay is limited by the number of rows and layers. The capacity is calculated according to the number of 8 layers of 18 rows with full-loads. The stowage diagram of each bay is randomly generated by Excel, as shown in
Figure A1 in
Appendix A.
The handling process of “DTQC + DET + ARMG” is adopted in the terminal handling operation. The transport speed, operation energy consumption and other relevant parameters of quay crane and DET are shown in
Table A4 in
Appendix A. There is an import container area and an export container area in the yard, respectively, for stacking the containers unloaded/loaded by this ship.
4.2. Solution Strategy
As discussed in
Section 2, the proposed 3 models are integrated by order. MODEL 1 optimize the loading and unloading sequences of the containers in the bay, achieving the minimum total quay crane operation time. Then, these optimized sequences will be set as the input information for MODEL 2, which optimizes the quay crane configuration and scheduling, with the objective of minimum total energy consumption for the quay crane operation. Next, based on the sequences of loading and unloading, as well as the quay crane configuration and scheduling, MODEL 3 is able to provide the optimum DET scheduling, in order to achieve minimum total energy consumption for the DET dispatching process.
MODEL 1 intent to optimize the loading and unloading sequence, which turns out to be a series of integer positives. Genetic Algorithm (GA) is selected as the methodology to work out the optimization. The detailed process is shown below.
(1) Coding method and initial population generation method
Each chromosome represents the loading and unloading sequence of the row of one bay. The negative number represents the unloading operation of each row in the bay, and the positive number represents the loading operation of each row in the bay.
The coding method is as follows: the unloading sequence of each row in the bay is generated randomly, and each digit of the chromosome represents the serial number of the row in the bay.
Figure 3 shows the unloading sequence of 10 containers in this bay.
Then, loading sequence is added. After each unloading operation row number, traverse all the loading operation row numbers that can be inserted, select the row with the smallest difference from the number of containers to be unloaded in the target row, and insert the row number after the unloading operation row number, as shown in
Figure 4.
In this example, six pairs of synchronous loading and unloading pairs were generated in this site, which were (−5,1), (−6,5), (−10,2), (−7,6), (−4,10), (−9,3).
(2) Fitness function
By optimizing the sequence of container loading and unloading in each bay, the number of synchronous loading and unloading of quay crane should be as many as possible. Therefore, the fitness function is set to the negative value of the objective function, so that the lower value of objective function leads to higher fitness.
(3) Chromosome selection
Chromosome selection was performed as follows:
① N individuals (N < M, N is the number of chromosomes in the current population) were randomly selected from the population, and the individuals with the largest fitness values were inherited to the next generation.
② The above process was repeated Q times, one chromosome was selected each time, and a total of Q chromosomes in the next generation population were obtained. The Q chromosome is directly passed on to the next generation.
③ For the remaining M-Q individuals, the roulette model is used to select.
(4) Genetic manipulation
The chromosomes in the population were crossed as follows. Select any two chromosomes, remove the loading column from the chromosome, select any same n row (n is selected according to the number of row s to be unloaded) from the two chromosomes, cross copy the n row in the two chromosomes, and obtain two new chromosomes without loading row. Then, according to the chromosome coding method, the loading sequence is added to the newly generated chromosome. The crossover method is shown in
Figure 5: first, select −1, −2, −3 of the two chromosomes for crossover, and then add the loading row after the row of the newly generated offspring.
The chromosome was mutated as follows. Choose any two unloading positions of chromosome to exchange their positions. If each container is unloaded first and then loaded, the chromosome is feasible. If a container is loaded first and then unloaded, the chromosome of the unloading position in the mutated chromosome is adjusted to ensure that each container is unloaded first and then loaded. The crossover method is shown in
Figure 6.
For Model 2, the scheduling scheme of quay crane is related to the position and moving direction of each quay crane within each time period, which is countable for a container ship to be loaded and unloaded, so that Enumeration Algorithm (EA) is utilized for solving exact solutions, is comprehensive.
As for the MODEL 3, finally, it is a mixed integer nonlinear programming problem, which results in difficulties in finding the accurate optimal solution. As a result, similar to the MODEL 1, GA serves as a proper alternative; meanwhile, the Simulated Annealing (SA) algorithm is introduced to obtain the initial solution for GA, in order to prevent the solutions falling into the local optimal. The detailed process of GA is similar with MODEL 1.
4.3. Optimization Results
4.3.1. Loading and Unloading Sequence in Bay
According to the stowage diagram of different bays in
Figure A1, MODEL 1 was solved by using MATLAB. The sequence of loading and unloading rows of 10 bays and the total operating time of each bay are shown in
Table 1.
Taking bay 1 as an example, the loading and unloading sequence Gantt chart is shown in
Figure 7. Within 0–10 min, the quay crane performs the unloading operation of the first row in a single cycle, and after the container in the first row is unloaded, it would carry out simultaneous loading and unloading operations. After 248 min, the 11th row will be loaded in a single cycle, and it will take 262 min to complete the container loading and unloading of all rows in bay 1.
4.3.2. Quay Crane Configuration and Scheduling
The total loading and unloading time window of a ship call in the port is 20 h, within which the terminal needs to dispatch the quay cranes to complete all loading and unloading operations. With the utilization of MATLAB again, MODEL 2 offers an optimized solution of the quay crane scheduling which is shown in
Table 2.
4.3.3. DET Scheduling
According to the stowage diagram of container ships in
Figure A1, it can be seen that a total of 2545 containers need to be moved by DETs. Based on the results of quay crane scheduling optimization, MATLAB programming is utilized to work out the different DET configuration schemes. In the scheduling scheme, the population size is set to 120, the maximum number of iterations is 1000, the initial temperature of the simulated annealing algorithm part is 1000, and the temperature drop rate r = 0.98. As a result, the reasonable DET resource to complete the designed job fits in the interval between 15 and 21, while their corresponding time and energy consumption are shown in
Table 3 correspondingly.
4.4. Result Discussions
4.4.1. Analysis of Optimization Results
As mentioned in
Section 4.3, through the optimization model, the integrated scheduling plan for the “DTQC + DET + ARMG” system could be obtained, indicating the feasibility of the proposed model.
On the basis of the optimized loading and offloading sequence in the bay (as shown in
Section 4.3.1), the quay crane configuration and scheduling are achieved. As can be seen in
Table 2, when the number of involved quay cranes less than three, the minimum time consumption is 1416 min, which may exceed the maximum time window allowance of 20 h. The energy consumption of three quay cranes is similar to that of two but fulfill the requested time window. However, when the number of involved quay cranes increase to four, there will not be any challenge to meet the operational time requirement but the total energy consumption will be much higher than before. Therefore, the optimal solution of quay cranes employment comes to three with a time requirement of 1125 mins at the energy consumption of 257,606 kWh. The optimal scheduling under this configuration is: quay crane 1 operates B1-B3 in sequence, quay crane 2 operates B4-B6 in sequence, and quay crane 3 operates B7-B10 in sequence.
Using the optimized quay crane configuration and scheduling results, the optimal DET scheduling is obtained, as shown in
Table 3. DET scheduling. Results shows that the allocated job cannot be performed in 20 h with the inputs of 18 DETs or less. Along with the continuous increase in DET involvement, the overall time required shows a clear decreased tendency and all meet the time window requirement, even though the energy consumption becomes higher and higher. As a result, the most appropriate solution comes from the 19 DETs involvement in the 19.98 hours operation at an energy consumption of 11,388.64 kWh. In addition, the proposed model is flexible to different scenarios which adopt different types of trucks. Replacing the DET in the original model by manual-driving diesel trucks or AGVs, the corresponding integrated scheduling plan could also be optimized. According to these optimization results, the comparison of different horizontal transportation equipment is then conducted from the perspective of operation efficiency, economy and sociality, respectively.
4.4.2. Comparison with Traditional Horizontal Transportation Vehicles
(1) Operation efficiency analysis
The allocation of those three types of horizontal transportation vehicles ranges from 15 to 25, the total corresponding operation time and operation efficiency are shown in
Table 4 and
Figure 8.
Within the given interval of horizontal transportation vehicles allocation between 15 and 25, the overall time consumptions of all those three types of vehicles shows a clear decreased tendency, while the corresponding operational efficiencies are consequently improved. Meanwhile, it can also be observed that the improvement of operational efficiency, or the saving of overall operational time consumption, becomes less significant once the allocated number of vehicles is greater than the threshold value of 19. It indicates a clear marginal utility within the process of vehicle allocation.
In regard to the individual vehicles, DET and AGV hold the most and least significant efficiency advantage, respectively, while the manual driving diesel truck is set in the middle. As the maximum travel speed of DET can reach about 35 km/h and it will only take about 5 min to replace the battery for a non-stopping operation. The manual driving diesel truck may run at the same travel speed, but the work shift cannot be as seamless as the DET. AGV’s designed travel speed in the port area is only about 20 km/h despite its great advantage in safety and labor saving. For example, given the task of loading and discharging containers of 2545 within the time window of 20 h, the request vehicles are 19 of DET, 25 of AGV and 23 of manual driving diesel trucks, respectively.
(2) Economic analysis
Taking the same task of 2545 container movement within the time window of 20 h, the overall transport costs of those three corresponding horizontal transport vehicles are computed by taking into account of the components of vehicle purchasing, tax, insurance, labor, fuel, etc. Please see
Figure 9 below for the results while
Table A3 in
Appendix A shows specific cost components and corresponding calculation methods.
Results indicate that the traditional manual driving diesel truck has been the most expensive option, costing about 64,000 RMB to move 2545 containers. Without any doubts, the major costs come from the fuel and labor section, about 43.98% and 35.48% of overall costs, respectively. The AGV spent only about half of the cost of the manual driving diesel vehicle to complete the task. However, it is worth noting that vehicle cost has been one of the main disadvantages of AGV’s application, in which 48.17% of its overall cost comes from the vehicle purchasing. The DET is the most economical choice as it only cost about 22,000 RMB for the given task, which is about two thirds of the AGV’s and one third of the traditional manual driving diesel truck. This is mainly due to the significant saving in vehicle purchasing and labor costing. It is particularly important nowadays as the shortage of truck driver becomes more and more serious.
In addition, in the case studies, the input parameters, for instance, the energy consumptions of DET and AGV in different operation processes, etc., are selected based on current typical situations, in order to provide a basic data set for presenting the application of the proposed models. Considering the development trend of DET and AGV will be toward lower energy consumption and lower cost. As a result, a detailed sensitively analysis for the results of the proposed models makes sense in relation to the future development of DET and AGV, which will be one aspects of our future work.
5. Conclusions
In this paper, the integrated scheduling optimization of the container handling system “dual-trolley quay crane + driverless electric truck (DET) + (Automatic rail mounted gantry) ARMG” was proposed. In such system, the driverless electric container truck, a new type of horizontal transportation equipment, is introduced. To conduct the integrated optimization, three models were developed, including the optimization of the loading and unloading sequence in bay (MODEL 1), optimization of quay crane configuration and scheduling (MODEL 2) and optimization of DET scheduling (MODEL 3). Genetic Algorithm was applied to solve MODEL 1 and MODEL 3, while the Enumerated Algorithm was used for MODEL 2. In addition, simulated annealing was combined with GA in the solution of MODEL 3 in order to prevent the results from being trapped into local optimal.
Through the optimization, the container loading and unloading plan, the corresponding configuration and scheduling of quay crane, and the scheduling of DET for the containers’ horizontal transportation could be figured out, which minimize the container loading and unloading operation time, and the total energy consumption for quay cranes and DETs. The case studies indicate the feasibility of the proposed models and algorithms, at the same time, through case studies, the performance of the newly introduced DET, was compared with the common manual driving diesel truck and AGV. DET turns out to be a better alternative due to lower cost, lower energy consumption as well as the reduction in labor costs.
Furthermore, there are still some issues that can be further discussed in the future.
(1) The container sizes are assumed to be the same. So, for the future work, the scheduling optimization problem of loading and unloading equipment for the mixed loading of 20 ft and 40 ft containers, refrigerated containers and dangerous goods containers will be with more practical value.
(2) In this paper, only the static scheduling process was considered, leaving out the fault of the quay crane and DET, path conflict and path congestion in real-time road conditions. Therefore, the real-time dynamic scheduling problem can be further studied in the future.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}