Abstract
To achieve the announced 2060 carbon neutrality goal, the government of China has recently established its “1 + N” legal and policy framework. However, the emerging autonomous vehicle technology, which is developing rapidly, is not included. Considering the significant potential of autonomous vehicle technology in reducing carbon emissions from the transportation sector, whether and how to integrate it into the current framework can be crucial for China. The existing literature typically does not regard the emission reduction impacts of autonomous vehicles as a major issue, and there are still few studies available aiming to ensure enhancement of emission reduction induced by autonomous vehicle technology from a legal and policy perspective. This article attempts to fill the above research gaps with a three-step research scheme. Specifically, this work begins with a comprehensive and detailed analysis of the possible wide range of factors affecting energy consumption and emissions of autonomous vehicles. Next, an in-depth discussion of the feasibility of incorporating autonomous vehicle technology into the current “1 + N” legal and policy framework is provided. Finally, several recommendations corresponding to these factors are proposed from legal and policy perspectives: (i) adoption of industrial incentives to mitigate research and development costs and risks at the production level and to expand market demand at the consumption level; (ii) priority promotion of the commercialization of autonomous vehicles in the taxi market by filling legal gaps and applying regulatory measures; (iii) development of efficient transportation policies and land use policies. This article provides a systematic and practical scheme for inclusion of autonomous vehicles in China’s legal and policy framework to realize the carbon neutrality goal. The proposed recommendations can be referenced for other governments that may face similar challenges and future development of possible uniform rules at the global level.
1. Introduction
Climate change has and will increasingly have significant and detrimental effects on human and natural systems [1]. Climate change is defined as “a change of climate which is attributed directly or indirectly to human activity that alters the composition of the global atmosphere and which is in addition to natural climate variability observed over comparable time periods” [2]. To combat climate change, around 200 countries adopted the Paris Agreement at the United Nations Climate Change Conference in 2015 [3]. The Paris Agreement requires all parties to achieve carbon neutrality by the second half of this century. Carbon neutrality is defined as a balance between anthropogenic emissions by sources and removals by sinks of greenhouse gases (GHG) [3].
China, accounting for 27% of global GHG emissions [4], has pledged to reach the carbon peak before 2030 and achieve carbon neutrality before 2060 as a State Party of the Paris Agreement [5]. To achieve its 2060 goal, China has been undertaking several concrete actions to reduce GHG emissions under relevant policies and laws. From 2005 to 2020, China achieved a 48.4 percent reduction in carbon intensity and a total reduction of about 5.8 billion tons of carbon dioxide (CO2) emissions, particularly in the fields of renewable energy and forest carbon sinks [6].
Decarbonizing transportation is a climate imperative but also a challenging one as current CO2 emissions from the transportation sector are not only huge but will grow further in the coming years. The transportation sector accounts for about 22% of global CO2 emissions [7]. Without effective interventions in this sector, CO2 emissions are expected to increase by 60% by 2050 [8], and most of these CO2 emissions come from road transport [9]. A similar situation occurs in China, where the transportation sector is responsible for around 9% of its total CO2 emissions [10], and road transport makes the largest contribution to CO2 emissions, accounting for about 82.7% of total transportation emissions [11].
Although the current proportion of CO2 emissions from road transport in China is lower than the world level, this proportion is likely to increase further soon considering that China’s motorization rate is yet to grow. The current number of vehicles per 1000 individuals in China is less than 200 in contrast to roughly 600 in the European Union (EU) and over 800 in the United States (US) [12]. If China reaches the EU’s current motorization rate by 2050, there will be more than 500 million vehicles, equivalent to the total number of vehicles in the US and EU today [12]. As China’s motorization rate rises, the share of road transport, as well as the transportation sector in overall CO2 emissions, is expected to increase significantly. Therefore, any transportation policies and laws must contribute to reducing emissions by promoting sustainable mobility. To this end, electric vehicles (EVs), public transit (PT), sharing systems, and autonomous vehicles (AVs) are possible solutions [13,14].
Vehicle electrification is the first promising way to reduce CO2 emissions from road transport. Research has shown that EVs offer significant CO2 emission reductions compared to conventional vehicles (CVs). This is because EVs do not produce tailpipe emissions on the end-user side, and their overall emissions remain significantly lower due to use of cleaner and more efficient power generators even when taking into account emissions from the entire electricity supply chain [15,16]. However, there are also concerns about life-cycle environmental impacts of EVs. Potentially negative environmental impacts may result from externalities mainly related to battery material mining, battery assembly, and battery recycling [13,17]. Therefore, these issues should be properly addressed by effective policies and laws to ensure that adoption of EVs will have a positive impact on the environment. In 2021, global sales of EVs reached 6.6 million, accounting for nearly 9% of the overall vehicle market, while China leads the global EV sales with 3.4 million sold [18]. Still, adoption of EVs faces two major obstacles: on the one hand, the high manufacturing cost, limited driving range, short range, and long recharging time, and, on the other hand, the lack of available electric charging infrastructure, which directly increases users’ “range anxiety” and reduces consumer demand [19]. Even if the above issues are largely addressed, with an EV market share of over 80% and a complete transition to renewable energy by 2050, soaring motorization rates will still keep China’s transportation emissions high [12]. This suggests that achieving CO2 reductions in the transportation sector cannot rely solely on vehicle electrification but also needs to address the inefficiencies of private vehicles.
PT is widely valued by the international community as an effective means to combat climate change and private vehicle inefficiencies. This is because PT has a good energy and emissions record [20]. However, PT still faces a chronic problem of low ridership, which significantly reduces energy efficiency and increases CO2 emissions per passenger. Since the COVID-19 pandemic in 2020, PT has experienced major disruptions in both operation and demand [21]. However, PT demand had declined significantly in the years before the pandemic. From 2014 to 2018, ridership by buses in China declined by 11.5% [22]. The main factors responsible for the decline in public transport ridership include internal factors, such as fares, service level, service frequency, transit modes, and network coverage, as well as external factors, such as population, economic conditions, physical form of urban areas, and transport infrastructures [23].
Carsharing offers a potential solution to address the inefficiencies of private vehicles and mitigate climate change impacts. Research has found that, by adopting carsharing, an average of 0.23 cars per household are reduced, and shared fleets are, on average, 10 miles per gallon more fuel-efficient than private cars [24]. Moreover, the underlying infrastructure of shared mobility management can be improved with use of information and communication technologies, which can reduce CO2 emissions by 70 to 190 million metric tons [25]. It is worth noting that the combination of EVs and carsharing systems is emerging globally as a feasible alternative to EV ownership for city residents [26]. However, widespread use of carsharing continues to face several obstacles, such as long waiting delay or a long way to walk to available vehicles, a lack of available dedicated parking spaces at the destination, and imbalance in vehicle distributions [27]. Therefore, new technologies are needed to further promote carsharing systems.
AV technology is receiving increasing attention as a potential way to reduce CO2 emissions. Society of Automotive Engineers International provides detailed definitions for six levels of driving automation [28]. Among these six levels, Level 4 (high driving automation) and Level 5 (full driving automation) are the main concern of this article, where an automated driving system performs all dynamic tasks of driving [29]. Although studies on the environmental impacts of AV technology are still relatively few, some studies have found a positive effect of AV technology on emission reductions in the transportation sector. For example, AVs can reduce emissions by up to 14% by improving driving efficiency in single-vehicle driving scenarios [30,31]; by improving traffic conditions at intersections in vehicle–infrastructure connection scenarios, AVs can reduce emissions by up to 59% [32]; and, by different cooperative models and speed strategies in multi-vehicle connection scenarios, AVs can potentially reduce emissions by up to 44.62% [33,34]. It should be noted, however, that AVs may also result in an increase in total vehicle miles traveled (VMT), which could potentially have an adverse impact on the environment [13]. This depends on various factors, such as increased demand induced by decreased travel costs and congestion [35]; lower value of travel time due to increased travel comfort, travel time reliability, and travel enrichment [36]; and increased mobility for the non-driving, elderly, and people with travel-restrictive medical conditions [37].
Combination of AV technology with other technologies is also emerging as a promising solution to environmental problems. Research has shown that AVs of Level 5, when combined with connected vehicle technologies and EV technologies (i.e., autonomous electric vehicles), can achieve even fewer air pollutants, energy consumption, and GHG emissions than each technology separately [13,38]. Furthermore, AV technology provides the potential to overcome the above-mentioned hindrances to diffusion of carsharing systems [39,40]. Thus, shared autonomous electric vehicles offer significant potential to further reduce GHG emissions and energy consumption [27,41,42]. In summary, if properly utilized and regulated, AV technology by itself and in combination with other technologies can play a key role in reducing emissions from China’s transportation sector and achieving the 2060 carbon neutrality goal.
AV technology is developing rapidly at an impressive rate in China, and the Chinese government is also moving toward adoption of AVs. From 2013 to date, numerous Chinese corporations (such as Baidu, Pony.ai, and AutoX) have been in a race to implement AVs. According to the 2021 Disengagement Reports from California, Pony.ai took the third spot with 305,617 miles driven with safety drivers in the vehicle; AutoX came out on top with 80,173 km per disengagement; and Apollo achieved the most driverless trips with 9565 miles [43]. Meanwhile, the Chinese government considers AV technology as a crucial strategy for future transition and upgrading of the automotive industry [44] and further requires development of intelligent and connected vehicles [45]. As a result, several plans for intelligent connected vehicles have been formulated, including both standard technology and application planning [46,47,48]. Furthermore, the 14th Five-Year Plan (2021–2025) calls for efforts to explore the possibility of creating a regulatory framework for autonomous driving and improve relevant laws, regulations, and ethical review rules [49].
Public attitudes toward AVs may not be as positive as those of manufacturers and policymakers. Many surveys have been conducted to assess public attitudes toward AVs and the results have suggested that the public is not yet ready to embrace AVs. For example, a survey conducted in Naples (Italy) observed an a priori reluctance of the average transport user to use fully automated buses and taxis of −2.31 Euro/trip [50]. The survey also revealed gender differences, with males 18–40 years old (>40 years old) having a reluctance in using driverless transit services, 53% (36%) lower than females [50]. Public acceptability of AVs is influenced by several factors, including safety, value of travel time, mobility, performance-to-price value, environmental friendliness, and symbolic value [51]. Many concerns have been raised regarding safety of AVs, particularly due to fears of handing over control of a vehicle to a “robot” or due to perceived risks associated with cyber-attacks and hacking of electronic systems [13]. These fears can be mitigated and AVs will be better accepted if automated driving systems replicate human control as closely as possible [52]. As AV technology continues to advance and gain wider use, public attitudes may shift, but much will depend on how policies and laws address safety and other concerns.
The current legal and policy framework developed for carbon neutrality has not considered use and impact of AV technology. A “1 + N” legal and policy framework has been established to achieve the 2060 carbon neutrality goal, and emissions reductions from the transportation sector have been included as an important part of that framework. However, the current carbon neutrality legal and policy framework takes little account of the possible impact of AVs on CO2 emissions. As mentioned before, on the one hand, AV technology has significant potential to reduce emissions, and this will become even more important as AV technology is further developed. On the other hand, AVs may also have a negative impact on the environment depending on various factors. Therefore, the potential environmental impacts of AVs should be integrated into the current carbon neutrality legal and policy framework to fully realize the emission reduction potential of AVs and contribute to achievement of the 2060 goal.
The existing literature normally does not address the emission reduction impacts of AVs as a major issue. Most of the articles address these issues as secondary outcomes. Their results reveal the potential benefits of AVs on emissions due to an abundance of factors. However, there are still few studies available aiming to ensure enhancement in emission reduction induced by AV technology from a legal and policy perspective. This article aims to study the following research questions:
- What are the impacts of AVs on carbon emissions and corresponding determinants?
- Can a legal and policy framework enhance the emission reduction induced by AV technology?
- How should a legal and policy framework ensure enhancement in emission reduction induced by AV technology?
This article attempts to fill the above research gaps with a three-step scheme, as shown in Figure 1. Specifically, this work begins with a comprehensive and detailed analysis of the wide range of possible factors affecting energy consumption and emissions of AVs. Next, an in-depth discussion of the feasibility of incorporating AV technology into China’s carbon neutrality legal and policy framework occurs. Finally, several recommendations corresponding to these factors are proposed from legal and policy perspectives. The proposed recommendations can be referenced for other governments that may face similar challenges and future development of possible uniform rules at the global level.
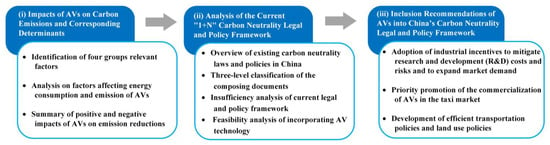
Figure 1.
The three-step research scheme.
The structure of this article is presented as follows. Section 1 provides an overview of the background and defines key concepts and issues in order to establish a foundation for the subsequent discussions in the following sections. Section 2 discusses the wide range of possible factors affecting energy consumption and emissions of AVs, including technological capabilities, market penetration, shared mobility, and city type; provides an overview of China’s existing carbon neutrality legal and policy framework; and analyses the feasibility of inclusion of AVs in it. Section 3 proposes some comprehensive and practical legal and policy recommendations based on the broad range of factors mentioned above for integrating AVs into the current framework. Section 4 concludes the article.
2. Materials and Methods
This legal and policy research on AVs employs a qualitative research design, specifically document analysis and case study analysis. (1) A comprehensive and systematic review of the academic literature related to the environmental impacts of AVs is conducted to identify possible factors affecting energy consumption and emissions of AVs. The factors are organized thematically and key themes are identified through a continuous comparison process. (2) An in-depth case study of China is realized to analyze the state of relevant law and policy in China, which includes a detailed review of the government policies and legal documents underpinning China’s carbon neutrality framework. This study has chosen China as the research country for three reasons: first, China is a major carbon-emitting country in the world and is striving to achieve its 2060 carbon neutrality goal; second, AV technology is developing rapidly in China and the government of China is moving toward adoption of AVs; third, a legal and policy framework for carbon neutrality has been established in China, which can serve as the research basis for this article. (3) A qualitative approach is used to analyze the findings and highlight areas that require further attention. This research aims to provide insights into the challenges and opportunities of integrating AVs in a carbon neutrality legal and policy framework, as well as the role of law and policy in shaping the development of AV technology.
2.1. Impacts of AVs on Carbon Emissions and Corresponding Determinants
Before inclusion of AVs in any carbon neutrality legal and policy framework, it is necessary to fully understand how AVs can have both positive and negative impacts on transportation emissions. As mentioned earlier, AVs can have significant potential to reduce emissions, but their potential is largely determined by a wide range of factors. Therefore, as demonstrated in Figure 2, this section will discuss the wide range of possible factors affecting energy consumption and emissions of AVs to provide a basis for the analysis in the following section. These factors have been grouped into four categories: technological capabilities, market penetration, shared mobility, and city type.
2.1.1. Technological Capabilities
Among the factors that affect the energy consumption and emissions of AVs, we will first consider those that stem from their inherent technical capabilities brought about by the development of AV technology, mainly including the capability to improve driving efficiency and the capability to enable cooperative connected mobility.
AV technology can improve driving efficiency, thereby reducing energy consumption and producing emissions reductions. First, AV technology can significantly reduce the number of traffic accidents by reducing risk of human error, considering that human error causes the majority of crashes [53]. Lower accident rates allow automakers to design and produce lighter vehicles as crashes are no longer an important consideration [54]. Studies have shown that an AV may weigh 20% less than a CV and that every 10% reduction in weight will reduce fuel consumption by 6–7% [53]. It should be noted, however, that AV technology may also introduce additional risks, such as hardware and software failures, malicious hacking, over-trusting technology, human drivers attempting to join platoons, difficulty detecting and accommodating non-auto travelers, etc. [13,55].

Figure 2.
Summary of corresponding factors and impacts of AVs on carbon emissions.
Figure 2.
Summary of corresponding factors and impacts of AVs on carbon emissions.

Second, AVs can drive more smoothly with reduced headway, thereby increasing lane capacity and reducing congestion. Studies have shown that AVs can increase effective lane capacity by up to 80% if Adaptive Cruise Control is cooperatively deployed in most vehicles [56]. Reducing congestion can reduce carbon emissions because a vehicle that is caught in traffic releases a higher amount of GHG per mile when compared to a vehicle that is operating at a moderate and consistent speed [57]. In addition, a reduction in the need for new lanes or road construction can also lead to a reduction in carbon emissions. Third, AVs can improve traffic flows by minimizing accelerating and braking, thus improving fuel economy. Automatic braking and acceleration can effectively solve low fuel economy caused by human drivers’ exaggerated braking and acceleration responses [53]. Studies have shown that automatic braking and accelerating can reduce energy consumption by at least 20–30% per VMT [58] and improve fuel economy by 23–39% [35].
AV technology can enable cooperative connected mobility, thereby reducing energy consumption and producing emissions reductions. Especially, cooperative eco-driving at intersections, cooperative adaptive cruise control, and platooning will yield the greatest environmental benefits [59]. With vehicle–vehicle connections and vehicle–infrastructure connections, use of AVs can improve traffic at intersections, resulting in emission reductions ranging from 13.8% to 59% [32,60,61,62,63,64,65,66,67,68]. Cooperative adaptive cruise control and platooning allow AVs to form vehicle strings with reduced inter-vehicle distances, reducing energy consumption by mitigating aerodynamic drag and unnecessary speed fluctuations [59]. Studies have been conducted to demonstrate that automated truck fleets can achieve energy savings of 4.5% to 15% [69,70]. In addition, cooperative connected mobility can reduce traffic congestion by improving traffic flow, increasing safety, and increasing road capacity. Since congestion increases GHG emissions and fuel consumption, reducing traffic congestion can reduce fuel consumption by 15–60% [35,56]. However, increased safety and efficiency lead to lower driving costs, which may increase the total VMT and thus GHG emissions due to the negative externalities of driving [53].
Summary: AVs can achieve carbon reductions with their inherent technological capabilities, particularly in improving driving efficiency and enabling cooperative connected mobility, but additional laws and policies are needed to effectively manage the increased total VMT.
2.1.2. Market Penetration
The current level of vehicle automation is still in its infancy. The rollout of AV technology will take place stage by stage and require a long time to reach a high market penetration rate of fully automated vehicles [36,71,72]. Research has found that 90% market penetration is not expected to be achieved until 2055 [71]. Many barriers in terms of technology, cost, regulation, and public acceptance need to be overcome before widespread adoption of AVs can occur [73]. Since the more common scenario for a long time in the future is coexistence of CVs and AVs, it is necessary to determine the impacts of different market penetration rates on the energy consumption and emissions of AVs.
Research has shown that market penetration is an important factor that affects emission reductions in AVs. In closed-loop field experiments, the presence of even a low percentage (5%) of AVs can reduce emissions of the entire fleet by between 15% (for CO2) and 73% (for nitrogen oxides, NOx) because stop-and-go traffic waves can be reduced or eliminated due to dampening action of AVs in the flow of CVs [74]. However, in real-world traffic models that involve human drivers, introduction of AVs may not necessarily lead to improvement in traffic conditions. Under high-density traffic conditions, unconnected AVs typically slow down due to safety and comfort considerations and generate 11% additional emissions [75]. Connected AVs can reduce CO2 emissions by 3–18% and NOx emissions by 4–32% on national road and motorway, but the specific effect on emission reductions shows a strong linear relationship with market penetration rate [76].
Market penetration of AVs affects carbon emissions because the proportion of AVs in the traffic flow has an impact on two fundamental parameters, namely road capacity and speed limit. As the market penetration of AVs increases, road capacity increases and emissions can be reduced by 30% as long as vehicle speeds do not exceed an optimal level [77]. Similar findings suggest that, at relatively high market penetration rates, introduction of Avs can improve the overall performance of motorway infrastructure, prevent congestion, improve safety, and significantly reduce emissions and fuel consumption [78]. However, under congested conditions, connected Avs generate more emissions in absolute values because of increased road capacity, which in turn increases traffic density [79]. This implies that, in the future, as the market penetration of AVs increases, the increase in road capacity may lead to an increase in the number of vehicles and total VMT, which may cause new environmental problems.
Summary: Increased market penetration of AVs can improve traffic flow, improve safety, increase road capacity, and reduce congestion. Emission reductions can be achieved if the increased number of vehicles and total VMT are effectively managed by introduction of effective laws and policies.
2.1.3. Shared Mobility
Shared mobility is receiving attention as an effective way to reduce emissions in the transportation sector. Shared mobility (including carsharing, on-demand ride services, and other modes) can reduce vehicle ownership and transport more people per vehicle per kilometer than private vehicles, leading to fewer total VMT, less traffic congestion, and less parking demand [80]. In addition, shared mobility can promote use of non-motorized transport modes, such as bicycling and walking. This is because shared mobility allows households with private vehicles to acquire access to automobiles through shared vehicles, thus reducing their reliance on private vehicles and promoting use of alternative non-motorized modes [81,82]. All these factors mentioned above could have significant environmental benefits.
However, widespread use of shared mobility still faces a series of obstacles. In the case of carsharing, there are problems of poor user convenience and high operation costs. In terms of user convenience, users need to wait a long time for an available vehicle or walk a great distance to reach an available vehicle [39]. In terms of operation cost, due to the inherent asymmetry in the distribution of travel demand, after the travel system has been operating for some time, vehicles inevitably accumulate in some areas and become depleted in others, so a good rebalancing strategy to relocate vehicles is needed or the whole system will be paralyzed [83]. Although use of on-demand ride services can greatly improve efficiency of passenger–vehicle matching, it is difficult to achieve optimal efficiency of the whole travel system because drivers are self-organized and make decisions in their individual interest, especially when large differences occur in system supply and demand, such as during peak travel hours.
AV technology can effectively help to overcome the above-mentioned obstacles, thus truly realizing the huge potential of shared mobility to reduce emissions. In terms of user convenience, AV technology eliminates the need for users to personally search for and/or walk to an available vehicle as a nearby vehicle can automatically drive to the user when the user requests vehicle service [40]. In terms of operation cost, vehicle relocation can be performed automatically. Especially when a vehicle is not in service, it can automatically drive to a favorable area with many available parking spaces or with a large number of travel demands [39]. In addition, the autonomous driving and highly collaborative natures of AVs can be used to achieve global operational optimization of the whole shared mobility system. Therefore, it is necessary to consider shared mobility as a factor when discussing the impacts of AVs on energy consumption and emissions.
The results of numerous studies have shown that the combination of shared mobility and AVs, namely shared autonomous vehicles (SAVs), also known as autonomous taxis or RoboTaxi, has huge potential to reduce emissions. Each SAV can replace up to eleven CVs and achieve significant emission reductions [39]. It is expected that, by 2030, each autonomous taxi will reduce GHG emissions per mile by up to 87–94% compared to CVs in the US [84]. A switch from traditional taxis to shared autonomous taxis can reduce 59% of the fleet size, 55% of the total travel distance, and up to 725 metric tons per day of carbon emissions while maintaining the same level of service [85]. If prices are low enough that more users will choose such services, emissions reductions of 16.8–42.7% can be achieved [86]. The same positive impact has been found in European cities, for example, in Lisbon, where SAVs can achieve up to 40% emission reductions [87].
Summary: The combination modes of shared mobility and AVs, such as SAVs, autonomous taxis, or RoboTaxi, can significantly reduce the number of vehicles and thus reduce carbon emissions. Therefore, effective laws and policies should be used to promote commercial application of AV technology in shared mobility scenarios.
2.1.4. City Type: Compatibility with Other Transport Modes and Land Use
While models based on specific real city networks typically yield positive impacts of AVs regarding emission reduction, this conclusion cannot necessarily be extrapolated to all types of cities as factors such as population, land use, demand, and supply in cities can indirectly affect potential of AVs to reduce emissions. Therefore, it is necessary to integrate these indirect effects into the analysis process when discussing impacts of AVs on emission reductions in the transportation sector, especially compatibility of AVs with other modes of transport and land use.
Compatibility with other transport modes. Adoption of AVs could offer a more attractive transport alternative, leading many individuals to switch from low-carbon modes of transport (such as walking, cycling, and PT) to AVs. Walking, cycling, and PT can reduce emissions significantly compared to private cars for the following reasons: these modes produce fewer emissions per person per mile than private cars [88], and private cars also produce more emissions in their manufacturing process [89]. Even when considering the emission reduction potential of AVs, walking, cycling, and PT are still more sustainable options and, thus, will remain the prioritized modes of transport [90]. However, the potential benefits (lower travel costs, lower value of travel time, lower parking costs, etc.) brought about by introduction of AVs may attract more people to shift from these modes of transport to AVs. Surveys and interviews have been conducted by some authors to consider the possible shift in people’s transport behavior caused by AVs with different population samples. The results show that a considerable proportion of respondents indicated that they would be willing to switch from walking (18%), cycling (32%), and PT (48%) to use of AVs [91]. Thus, with introduction of AVs, it is expected that, by 2050, car kilometers could be more than 50% higher, PT use would decline by 18%, and walking and cycling would decline by 13% [92].
AVs, as a complement to (rather than an alternative to) PT, can generate better results in reducing total VMT and congestion, thereby reducing carbon emissions. Introduction of AVs alone may cannibalize PT ridership and increase total VMT and congestion in urban transport systems, thus increasing carbon emissions. For compact cities with well-developed PT networks, the negative externalities induced by substantial substitution of AVs for PT are significant considering the dominant position of the PT sector in the urban transport system. In Toronto, Canada, for example, PT is responsible for 32% of daily passenger kilometers traveled, but its carbon emissions account for only 4% of the overall transportation sector. With introduction of AVs, 3.6–5.4% higher vehicle kilometers traveled and 2.5% more GHG emissions are expected [93]. To address this issue, it has been proposed that integration of AVs with PT can produce better results in terms of reduction in vehicle kilometers traveled and congestion in compact cities with well-developed PT networks [94].
Land use. Adoption of AVs may lead to urban sprawl. Deployment of AVs may cause a shift in home location decision-making of commuters in the long term [95]. As AVs reduce travel costs and the value of travel time, some commuters (to obtain lower land prices or larger house sizes) may decide to move further away from urban centers, which may result in urban sprawl [13,51,53,96]. Simply put, the economics and practicality of urban sprawl become more apparent as AVs make travel more economical and convenient [97]. However, urban sprawl will inhibit walking, cycling, and PT, making commuters more dependent on private vehicles and thus leading to more GHG emissions [98].
Deployment of AVs can reduce the need for parking land. Given that AVs can be geographically separated from their owners when not in use, increased AV penetration reduces the need for parking lots near destinations, thereby reducing the total amount of space required for parking (potentially by as much as 31% in urban areas) [13,55,97,99]. Even at a very low penetration rate (5%), AVs can still reduce parking land by 4.5% [100]. Adding to this, by optimizing layout design, AV car parks can reduce the need for parking spaces by an average of 62% and a maximum of 87% [101]. The reduction in parking land can generate significant environmental benefits as inclusion of parking lots in the overall life-cycle emissions increases energy consumption by 0.1–0.3 MJ and GHG emissions by 6–23 g CO2e per passenger kilometer traveled [102]. At the same time, promotion of AVs helps to solve the insufficient supply of parking space and the resulting traffic congestion and illegal parking, which are themselves important sources of carbon emissions [103].
Summary: Deployment of AVs will lead to more travelers switching from walking, cycling, and PT to AVs, resulting in increased total VMT and congestion. However, integration of AVs and PT can produce better results in terms of reducing total VMT and congestion. At the same time, deployment of AVs may lead to urban sprawl and a reduction in parking land, which can affect carbon emissions to varying degrees. Therefore, additional laws and policies should be dedicated to mitigating the negative impacts of AVs by guiding urban planning so that their emission reduction potential can be fully realized.
2.2. Analysis of the Current “1 + N” Carbon Neutrality Legal and Policy Framework
This section will provide an overview of China’s current carbon neutrality legal and policy framework and analyze the feasibility of the inclusion of AVs in it. Reducing carbon emissions from the transportation sector, as an important part of achieving the “2060 carbon neutrality” goal, has been integrated into the current “1 + N” legal and policy framework. In this “1 + N” framework, “1” refers to the Working Guidance [104], which presents the long-term approach to combating climate change, and “N” stands for a combination of new action plans, starting with the Action Plan [105]. As shown in Table 1, the “1 + N” framework is composed of three-level documents: (1) top-level design documents, namely the Working Guidance and the Action Plan, forming the core of the “1 + N” legal and policy framework to guide the fight against climate change; (2) implementation plans issued for key sectors according to the top-level design, including energy, transportation, industry, rural and urban construction, etc.; and (3) supporting measures encompassing science and technology, carbon sinks, statistical accounting, inspection, and assessment, as well as safeguard measures relating to fiscal, financing, and pricing methods.
Top-level design documents. Currently, the two documents released in October 2021 together constitute the top-level design of the “1 + N” framework, namely the Working Guidance and the Action Plan. To achieve the overall 2060 carbon neutrality goal, these top-level documents set major targets by 2025, 2030, and 2060, respectively. Specifically, the Working Guidance lays thirty-one key tasks in ten aspects, presenting the overarching high-level strategies and principles of all forthcoming actions to set China on a path to achieve its climate goals, and the Action Plan identifies ten concrete actions to reach carbon peak, drawing a roadmap to achieve the carbon neutrality goal.
In the field of transportation, the Working Guidance requires accelerating the construction of a low-carbon transportation system and proposes three major initiatives: improving the transportation structure, encouraging use of energy-conserving and low-carbon transportation vehicles, and encouraging use of low-carbon transportation modes [104]. In other words, low-carbon transportation should be established from three levels: mode, technology, and consumption. The Action Plan, on the other hand, incorporates the action for promoting green and low-carbon transportation into its ten actions and provides a set of systematic, comprehensive, and quantitative targets to be achieved by 2030, such as reaching a share of about 40% of incremental vehicles fueled by new and clean energy; reducing the carbon emission intensity of commercial vehicles, when measured based on a converted turnover, by around 9.5% compared to 2020; and, in cities with permanent populations of one million or more, having no less than 70% of travels by environmentally friendly modes [105].
Implementation plans. Concerning the action for promoting green and low-carbon transportation, the most relevant implementation document available is Implementation Opinions, released in June 2022 [106]. The Implementation Opinions put forward twelve initiatives from four perspectives (transportation structure, transportation vehicles, transportation modes, and green transformation), such as accelerating the construction of a comprehensive three-dimensional transportation network, actively developing new energy and clean energy vehicles, promoting transportation electrification, improving energy efficiency standards for fuel vehicles and vessels, comprehensively promoting the construction of a national public transport city, strengthening green and low-carbon development planning, and enhancing transportation technology innovation capabilities [106].
Supporting measures and safeguard measures. In terms of transportation, China has introduced multi-phase fuel standards and emission standards to promote green and low-carbon transportation. Phase I and II fuel consumption standards for passenger vehicles were first issued in 2004 and implemented in 2005 (National Standard GB 19578-2004), requiring each vehicle model to meet specific fuel consumption regulations before entering the market [107]. Phase III standards (GB 27999-2011), issued in 2011 and implemented in 2012, introduced corporate average fuel consumption (CAFC) targets, establishing average fleet targets in addition to the per-model standards [108]. Phase IV standards (GB19578-2014, GB 27999-2014), released in 2014 and implemented in 2016, set a new average fleet fuel consumption target of about 5.0 L/100 km for new passenger vehicles in 2020 [109,110]. Currently, China has Phase V standards implemented in 2021, which established new fleet average targets of 4.0 L/100 km (New European Driving Cycle) by 2025 and 3.2 L/100 km by 2030 [111,112].
The above discussion shows that, under the existing “1 + N” legal and policy framework, the overall carbon neutrality goal has been refined into specific phased targets. This framework is comprehensive and covers almost all key sectors and industries, including the transportation sector. In terms of top-level design, the Working Guidance, when referring to “promoting energy-saving and low-carbon transportation vehicles”, puts forward the requirement of promoting “intelligent transportation” from the technical level, which leaves room for inclusion of AV technology. However, the Action Plan does not involve any requirement regarding vehicle automation and only considers vehicle electrification as the main requirement when referring to promotion of low-carbon transformation of transportation vehicles. Therefore, the systematic, comprehensive, and quantifiable set of targets established by the Action Plan does not include any automation-related targets. In terms of implementation plans, supporting measures, and safeguard measures, the impacts of AVs are not reflected in either the Implementation Opinions or the existing fuel standards and emission standards.
In summary, the current carbon neutrality legal and policy framework takes little account of use and impact of AVs on carbon emissions. As discussed in Section 1, AVs can have huge potential to reduce emissions, and, as AV technology is further developed, its impacts on overall transportation emissions will become more important in both positive and negative terms. Therefore, use and possible impacts of AVs should be integrated into the current “1 + N” legal and policy framework so that the positive impacts can be brought into play and negative impacts can be suppressed, ensuring that AVs will enhance the ongoing efforts to reduce emissions. Inclusion of AVs in the current legal and policy framework is feasible because the Working Guidance, as the top-level design of the framework, explicitly leaves room for intelligent transportation technologies. Therefore, the inclusion of AVs in this framework does not require any substantial top-level design reconstruction. However, goals and initiatives concerning vehicle automation should be formulated in the coming implementation plans and supporting measures and safeguard measures. When doing so, the existing parts about vehicle electrification in the framework can provide useful and instructive references for inclusion of AVs.

Table 1.
Key policies and laws of the “1 + N” framework released in 2022.
Table 1.
Key policies and laws of the “1 + N” framework released in 2022.
| Top-Level Design | Implementation Plans | Supporting and Safeguard Measures |
|---|---|---|
| “1”: Working Guidance for CO2 Peaking and Carbon Neutrality in Full and Faithful Implementation of the New Development Philosophy “N”: Action Plan for Carbon Peaking Before 2030 | Action 1: green and low-carbon energy transition Opinions on Improving the Institutional Mechanism and Policy Measures for Energy Green and Low-Carbon Transformation; Plan for Modern Energy System during the 14th Five-year Period; “14th Five-Year” Development Plan for Renewable Energy. | Opinions on Financial Support for Carbon Peaking and Carbon Neutrality; Guidelines on Tax Incentives to Support Green Development; Implementation Plan for Establishing and Improving the Measurement System for Carbon Peaking and Carbon Neutrality Standards. |
| Action 2: energy saving, carbon emission mitigation, and efficiency improvement Comprehensive Work Plan for Energy Conservation and Emission Reduction for the “14th Five-Year Plan” Period; Notice of Issuing the Advanced Level, Energy Saving Level, and Access Level of Energy Efficiency of Key Energy-Using Products and Equipment (2022 Version). | ||
| Action 3: peaking CO2 emissions in the industry sector Notice of Issuing the Implementation Plan for Carbon Peaking in the Industrial Sector. | ||
| Action 4: peaking CO2 emissions in the urban-rural development area Guideline on Promoting Green Development in Urban, Rural Areas; Plan for Advancing Agricultural and Rural Modernization during the 14th Five-Year Plan Period. | ||
| Action 5: promoting green and low-carbon transportation Opinions on Implementing the Guidelines of the Central Committee of the Communist Party and State Council on Implementing the New Development Concept in a Complete, Accurate and Comprehensive Manner to Achieve Peak Carbon and Carbon Neutrality. | ||
| Action 6: promoting circular economy for carbon mitigation purposes Plan for Development of the Digital Economy During the “14th Five-Year” Period; Notice of Further Effectively Conducting the Work Concerning Non-inclusion of Newly Added Renewable Energy Consumption in the Total Energy Consumption Control. | ||
| Action 7: advancing green and low-carbon technology innovation Implementation Plan for Science and Technology Support for CO2 Peaking and Carbon Neutrality (2022–2030); Implementing Carbon Peaking and Carbon Neutrality Targets and Promoting the Green and High-quality Development of New Infrastructure such as Data Centers and 5G. | ||
| Action 8: consolidating and enhancing carbon sink Accounting Methods for Economic Value of Ocean Carbon Sink. | ||
| Action 9: green and low-carbon society Implementation Plan for the Construction of National Education System for Green Low-carbon Development; Implementation Plan for Promoting Green Consumption. | ||
| Action 10: promoting all regions to peak CO2 emissions hierarchically and orderly Implementation Plan of Carbon Peak of Beijing; Implementation Plan of Carbon Peak of Shanghai. |
3. Results and Discussion
In the previous section, a better understanding of how the wide range of factors determine the emission reduction impacts of AVs has been achieved, and the “1 + N” carbon neutrality legal and policy framework has been analyzed. The huge potential of AVs in emission reduction has been recognized at the technical level, but the possible risks of AV technology should also be considered, such as safety risks, cybersecurity risks, legal and regulatory risks, ethical risks, and social risks. If these risks are not properly addressed, the emission reduction potential of AVs will not truly be realized. In a worst-case scenario, introduction of AVs may even create new challenges and hinder the ongoing efforts to reduce GHG emissions. Therefore, government agencies must prudently address the negative externalities associated with adoption of AVs while promoting their diffusion to truly realize the emission reduction potential of AVs. However, China’s existing “1 + N” legal and policy framework is not sufficient to ensure that AVs will enhance ongoing efforts to reduce GHG emissions, so additional laws and policies are needed. With this in mind, this section will propose several legal and policy recommendations, corresponding to the wide range of factors analyzed in Section 2, for the integration of AVs in the current ”1 + N” carbon neutrality legal and policy framework. As shown in Figure 3, these recommendations aim to act on the extensive factors affecting AVs emissions to leverage their positive impacts and dampen the negative ones.
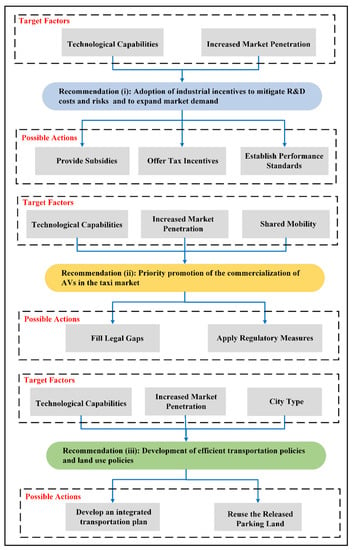
Figure 3.
The target factors and possible actions of inclusion recommendations.
3.1. Providing Industrial Incentives to Promote AVs
As discussed in Section 2, AVs can achieve carbon emission reduction through their inherent technological capabilities, and an increase in their market penetration can further reduce carbon emissions. Therefore, production and consumption of AVs should be promoted to gradually increase their market penetration. However, the production of AVs requires significant R&D investment. As an emerging industry, the corporations that produce AVs inevitably face the dilemma of insufficient market demand, which in turn leads to high risks regarding R&D investment.
To address the two major constraints for the AV industry, i.e., the high risks of R&D investment and the lack of market demand, effective industrial incentives should be used so that compensation is provided at the production level to mitigate the cost and revenue risks associated with the strong externalities of R&D, and, at the consumption level, market demand should be induced and expanded. Specifically, the Chinese government should consider taxes, subsidies, performance standards, and other policy instruments in the production and consumption chain, respectively. The financial incentives (subsidies and tax incentives) can reduce the R&D costs in production and lower the market price, thus leading to an increase in the production and consumption scale in the short term. Performance standards and other policy instruments can promote AV enterprises to improve their innovation capabilities and reduce their reliance on government financial incentives, thus facilitating growth in AV production and consumption in the long run.
Subsidies. The Chinese government could subsidize purchase and lease of AVs, thereby reducing R&D costs in production and promoting consumption of AVs. Specifically, the central government can subsidize AV manufacturers, who sell AVs to private users or leasing companies at a lower price net of subsidies; the central government can also subsidize important upstream companies, which sell key components that affect the costs of AVs, such as sensors and chips, at a lower price net of subsidies to AV manufacturers. In addition, the central government should also dedicate appropriate funds to support construction of new infrastructure to enable deployment of AVs. However, use of the above financial incentives requires significant investments to achieve high market penetration of AVs, so they may not be sustainable in the long run. Moreover, they do not help AV manufacturers to improve their innovation capabilities. Therefore, the government should implement a subsidy rollback mechanism and set a series of rollback targets depending on the different development stages of the AV industry before use of subsidies.
Tax incentives. On the supply side, suppliers and manufacturers of AVs should be provided with reductions or refunds in value-added tax, consumption tax, income tax, and other taxes to compensate them for the upfront R&D investments. For example, new pre-tax reduction policies could be adopted so that AV enterprises will be entitled to enjoy a 100% deduction of R&D expenses amount before enterprise income tax. On the demand side, to increase the market penetration of AVs, the government can provide tax refunds, pre-tax reductions, or similar tax incentives to users of AVs. For example, AVs could be exempt from a purchase tax.
Performance standards. By setting mandatory fuel standards and AV production percentages, the Chinese government can require and motivate AV manufacturers to increase R&D investment. Specifically, the government can establish a “dual credit” policy by adding a new AV credit performance standard to the existing CAFC credit performance standard for passenger vehicles. Under the existing CAFC regulation, each vehicle manufacturer has a specific annual CAFC target. If its actual CAFC for a given year is lower than its annual CAFC target, the manufacturer will produce CAFC credits. In contrast, if its actual CAFC is higher than its target, the manufacturer will face a CAFC deficit. Based on the existing CAFC regulation, a new AV credit performance standard could be introduced. Specifically, a vehicle manufacturer must also meet a new annual AV target score, i.e., a percentage of its total annual production or import of conventional fueled passenger vehicles. The manufacturer generates an AV score by producing or importing AVs. When the actual AV score of a manufacturer exceeds its target score, the manufacturer acquires AV credits. Conversely, if the actual AV score is less than the target score, the manufacturer must face an AV deficit. More importantly, AV credits can be traded and used to offset CAFC deficits, while manufacturers with additional CAFC credits cannot use those credits to offset AV deficits. By the establishment of this “dual credit” policy, AV manufacturers will be required and motivated to increase R&D investment to meet CAFC performance standards and AV performance standards and to trade the extra AV credits for more revenue.
Other policy instruments. Infrastructure construction, priority rules, and multiple policy instruments could also be used. Infrastructure construction, in particular, can increase market demand for AVs by improving road conditions for potential AV users. In this regard, the Chinese government has explicitly identified construction of an advanced and complete infrastructure system for intelligent vehicles as an important strategy [113]. To further implement this strategy, the Ministry of Transport has made it a major task to improve the level of road infrastructure intelligence [114]. In the next step, relevant government agencies should develop guiding opinions and a series of specific action plans to specifically address the infrastructure construction for AVs.
3.2. Promoting Commercial Application of AV in Taxi Scenarios
As discussed in Section 2, AVs can achieve carbon emission reduction through their inherent technological capabilities, and an increase in their market penetration can further reduce carbon emissions. Therefore, production and consumption of AVs should be promoted to gradually increase their market penetration. However, increased market penetration of AVs may result in an increase in the number of vehicles and total VMT. To cope with this dilemma, development of a combined mode of shared mobility and AVs can significantly reduce the number of vehicles and total VMT. To this end, this section proposes that effective policy instruments should be used to promote commercial application of AVs in taxi scenarios (i.e., RoboTaxi) as a priority to maximize emission reduction benefits by leveraging the positive impacts and mitigating negative impacts of AVs.
The taxi market (including services through traditional taxis and ride-sourcing vehicles) is one of the autonomous driving scenarios with the largest market potential. The global RoboTaxi market was valued at approximately USD 240 million in 2021, but it is expected to reach USD 30.81 billion by the end of 2031, with a compound annual growth rate of up to 62.5% [115]. Considering the large population, high urban density, and robust travel demand in the Chinese market, the growth rate of the Chinese RoboTaxi market will be even higher than the global average. By 2030, in China, the RoboTaxi market is expected to reach more than 60% of the total shared mobility market, with a market value of more than CNY 1.3 trillion [116]. In 2020, China’s Ministry of Transportation explicitly encouraged use of AVs for taxi services in scenarios with simple and relatively controllable traffic conditions [117].
The cab market is suitable for the rollout of AVs for two main reasons: on the one hand, taxi fleets are more receptive to new technologies. For example, to promote diffusion of EVs, governments around the world adopted several incentives, but most of them failed to achieve the expected results in social fleets. The government of China launched EV demonstration projects in 2009 and 2012, respectively, but, by 2015, the EV market share in China was still below 2% [118]. In contrast, the rollout of EVs in taxi fleets has been quite successful. Almost all the taxis (99.06%) in the Chinese city of Shenzhen had been electrified by 2019 [119]. On the other hand, the taxi market is more receptive to the new policies. This market is not a market with solid policies, and many governments have implemented various regulatory measures for it, such as authorization fees, operating fees, and commission caps. In this regard, the Chinese government has reformed the taxi industry and laid down some important regulatory principles, such as that pricing for ride-sourcing services shall be based on market prices in most cases while pricing for traditional taxi services must be set by local governments [120].
However, the development of the RoboTaxi market in China is still constrained by two major factors: laws and regulations and deployment costs. In terms of laws and regulations, the relevant laws and regulations are seriously insufficient, although several policies have been promulgated in the field of AVs. (1) Relevant laws and regulations are all designed around CVs in terms of inspection, testing, classification, issuance of driving licenses, etc. They do not apply to AVs as they do not consider the special characteristics of AVs. (2) National legislation has yet to formally permit road testing and commercial operation of AVs. Although local governments have taken the lead in enacting legislation in this area, inconsistencies exist in different local legislations. This is detrimental to the certainty and consistency of the road traffic legal system.
In terms of deployment costs, the cost of an autonomous driving solution may be extremely high based on the current level of technologies. The cost of an entire AV will increase significantly due to installation of advanced autonomous driving solutions, thus affecting its market competitiveness. AVs rely on algorithms, sensor systems, machine learning, artificial intelligence, and computers to accurately perceive and safely navigate their environments. Especially, AVs have a higher demand for sensor systems and deep-learning accelerator chips, i.e., multiple LIDARs (light detection and ranging) and cutting-edge chips better suited for processing artificial intelligence applications.
To address these two major constraints, feasible solutions from legal and policy perspectives should be considered:
- (1)
- The lack of relevant national legislation should be filled based on the characteristics of AVs to pave the way for AVs to hit the road legally and safely. Relevant national legislation should provide guidance to manufacturers, developers, and other stakeholders on various aspects, including testing procedures, data recording and sharing rules, cybersecurity requirements, incident reporting requirements, monitoring of safety performance, etc., to promote safe design, testing, and deployment of AVs. Specifically, several laws, such as the Road Traffic Safety Law and the Highway Law, should be amended. New provisions regarding the safe testing and deployment of L3-level AVs were considered in the revision process of the Road Traffic Safety Law, which clarified for the first time the safety and legality of AVs before they hit the road [121]. However, even with these new provisions, the testing and deployment of L4- and L5-level AVs are still facing legal barriers, so the Road Traffic Safety Law, as well as other laws, should be further amended to incorporate L4- and L5-level AVs. In addition, the introduction of L4- and L5-level AVs will fundamentally change the existing legal liability regime. Therefore, it is necessary to consider a separate law on autonomous driving and comprehensively coordinate the new law with existing laws.
- (2)
- Regulatory measures should be adopted to reduce deployment costs of AVs and promote automation of the taxi market. Specifically, in addition to measures such as providing direct subsidies or prohibiting CVs, the Chinese government should apply effective regulatory policies to the taxi market, such as differential commission caps, differential trip-based fees, and annual permit fees. In 2021, the Chinese government explicitly required ride-sourcing platforms to set reasonable commission caps with the participation of labor unions and industry associations [122]. For this purpose, additional modeling and data analysis studies are needed to fully engage the role of ride-sourcing platforms in the promotion of AVs. The purpose of these studies is to determine how ride-sourcing platforms respond to a potential regulatory measure and how their responses further affect the functioning of the overall taxi market, as well as income and social welfare of drivers.
3.3. Encouraging Efficient Transportation Policies and Land Use Policies
As discussed in Section 2, deployment of AVs can have an impact on transport modes and land use patterns. On the one hand, deployment of AVs may lead to more travelers switching from walking, cycling, and PT to AVs, resulting in increased total VMT and congestion. On the other hand, deployment of AVs may lead to urban sprawl and a reduction in parking land. These potential changes could affect carbon emissions to varying degrees. To better address them, effective land use policies and transportation policies can mitigate the negative impacts of AVs and leverage their positive effects by guiding urban planning. While some basic policies aimed at promoting sustainable cities can be applied to AVs, the characteristics of AVs should also be considered. Based on the characteristics of AVs and the specific conditions in China, this section proposes two feasible solutions in terms of transportation policy and land use policy, respectively, to maximize the emission reduction potential of AVs.
In terms of transportation policy, the Chinese government should develop an integrated transportation plan that allows AVs to complement PT to ensure that introduction of AVs will not replace PT but rather promote its use. As discussed before, PT faces a chronic problem of low ridership, which significantly reduces energy efficiency and increases carbon emissions per passenger. In most communities, the majority of the total population has the option of driving, while a relatively small portion relies on PT. Their choices are influenced by several factors, such as price and quality of PT services and the cost of driving [123]. Therefore, to increase PT ridership, in addition to increasing the cost of driving, it is necessary to reduce its price and improve the quality of its services so that more people would be attracted to choose PT over driving.
By replacing conventional buses with autonomous buses or using AV operations as a supplement to conventional bus services, the price of PT can be significantly reduced and its service quality can be improved. (1) Replacing conventional buses with autonomous buses can overcome the limitation of the number of drivers and eliminate the manual driving costs of PT services. In this case, only the purchase cost and operating cost of vehicles need to be considered in pricing, thus significantly reducing the price of bus services. Especially in the context of China, with an aging population, increasing age of bus drivers, and rising labor costs in recent years, autonomous buses can be an effective way to address this problem [124]. (2) Replacing conventional buses with autonomous buses can break through the size limitation of buses and improve the adaptability of bus route design and scheduling schemes. In this case, the operation cost can be reduced and service quality can be improved. Specifically, by introducing right-sizing autonomous buses, bus route design and scheduling schemes can be optimized based on passenger demand to accommodate the uneven spatial–temporal distribution of bus travel demand, thus achieving a spatial–temporal balance of supply and demand. (3) Use of AV operations as a supplement to conventional bus services can improve service quality by providing convenient “first and last mile” services to people traveling to and/or from bus stops to fill gaps in PT services. To further enhance convenience, smartphone applications can be used or created that allow those who have prepaid for PT to be given priority treatment when booking or receiving AV service.
Although introduction of AVs can reduce the price and improve the quality of PT service, a significant increase in ridership cannot be guaranteed. This is because PT demand is also significantly affected by cost of driving. Therefore, it is also necessary to appropriately increase the cost of driving. To achieve this, transportation planning regulations should be adopted to discourage or prohibit use of private vehicles in certain areas and to charge additional fees for vehicle users, thereby increasing the cost of driving and providing conditions for maximum PT ridership. Specifically, chronically congested areas or areas where roads are narrow and difficult to navigate could be zoned to discourage or prohibit use of private vehicles. Furthermore, congestion pricing mechanisms and priced parking mechanisms could also be adopted. For example, private vehicles should be charged for using roads in congested areas, and different parking fees should be charged by area and time of day, i.e., higher fees in congested areas and during peak hours.
In terms of land use policies, parking land released by AVs should be fully reutilized to create new zones for active transportation modes (walking and cycling) and urban green space. As discussed in Section 2, AVs, with their inherent technological advantages, can reduce the need for parking space; therefore the Chinese government should re-examine and update parking requirements for development projects to reflect the potential reduction in parking demand that could arise from use of AVs. These freed-up parking spaces could be dedicated to creating urban zones suitable for walking and cycling or developing safe and convenient facilities for bicycle and pedestrian travel, thereby contributing to promotion of these active transportation modes. More importantly, these reduced parking spaces can also be transformed into green spaces with high carbon sequestration capacity. Urban green space refers to an area of soil surface that can support vegetation and the vegetation that is supported, i.e., urban parks, nature reserves, green corridors, green belts, etc. Green spaces can reduce CO2 in the atmosphere in three ways: (1) urban trees and shrubs can sequester and accumulate carbon directly through photosynthesis as they grow; (2) urban vegetation reduces cooling needs of buildings through shading and evaporation and decreases heating needs by reducing wind speeds, thus reducing carbon emissions from use of fossil fuels; and (3) urban soils can store organic carbon from waste until they return to the atmosphere through decomposition [125]. With the growth in vehicle ownership in China, the demand for parking is expected to reach 600 million by 2025, while only 250 million parking spaces are currently available [126]. This suggests that a large amount of potential parking land could be converted into green space, which can play a significant role in achieving China’s 2060 carbon neutrality goal.
4. Conclusions
To achieve the announced 2060 carbon neutrality goal, the government of China has recently established its “1 + N” legal and policy framework. Due to the huge carbon emissions of the transportation sector, targets and initiatives to reduce carbon emissions from it form a critical component of this overall framework. However, decarbonizing transportation is a very challenging task as potential approaches (vehicle electrification, PT, and carsharing) are difficult to achieve widespread adoption. The emerging AV technology cannot only significantly improve the efficiency of the current transportation system but also has significant potential to reduce carbon emissions. In addition, integration of AV technology with other potential approaches can mitigate barriers to their diffusion. Considering that the current legal and policy framework has not considered use and impact of AV technology, this article intends to answer whether such integration could be completed and how.
Specifically, this article begins with a detailed analysis of the factors affecting energy consumption and emissions of AV technology, including technological capabilities, market penetration, shared mobility, and city type. Next, an in-depth discussion of the feasibility of incorporating AV technology into the current legal and policy framework is provided. Through an analysis of the existing policies and laws underpinning the “1 + N” framework, the integration will not require any substantial reconstruction of current policies and laws. Moreover, the existing parts about vehicle electrification in the “1 + N” framework can provide useful and instructive references for inclusion of AVs. Finally, several recommendations corresponding to these factors are proposed from legal and policy perspectives. These recommendations aim to act on the extensive factors affecting AVs emissions to leverage their positive impacts and dampen the negative ones.
To conclude, the proposed recommendations address three main areas, as shown below.
(i) Industrial incentives should be adopted to provide compensation at the production level to mitigate the R&D expenses and revenue risks for AV enterprises and to induce and expand market demand at the consumption level. First, subsidies should be provided for AV manufacturers and important upstream companies, as well as for construction of AV infrastructure. In addition, the government should implement a subsidy rollback mechanism. Second, tax incentives should be provided both on the supply side and on the demand side. Third, a “dual credit” policy could be established by adding a new AV credit performance standard to the existing CAFC credit performance standard.
(ii) Priority promotion of commercialization of AVs in the taxi market. In terms of laws, the lack of relevant national legislation should be filled based on the characteristics of AVs. Several laws, such as the Road Traffic Safety Law and Highway Law, should be amended, and a separate law on autonomous driving could also be considered when introducing L4- and L5-level AVs. In terms of deployment cost, regulatory policies should be adopted to reduce deployment costs of AVs and promote automation of the taxi market, such as differential commission caps, differential trip-based fees, and annual permit fees.
(iii) Efficient transportation policies and land use policies should be developed. In terms of transportation policy, the Chinese government should develop an integrated transportation plan that allows AVs to complement PT to ensure that introduction of AVs will not replace PT but rather promote its use. In terms of land use policies, the parking land released by AVs should be fully reused to create new zones for active transportation modes (walking and cycling) and urban green space.
This article provides a systematic and practical scheme for inclusion of AVs in China’s legal and policy framework to realize the carbon neutrality goal. The proposed recommendations can be referenced for other governments that may face similar challenges and future development of possible uniform rules at the global level.
Author Contributions
Funding acquisition, X.-W.L. and H.-Z.M.; Writing—original draft, X.-W.L. and H.-Z.M.; Writing—review and editing, X.-W.L. and H.-Z.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Social Science Funding of Liaoning Province (L21CSH002); Funding of Liaoning Province for Young Talents in Philosophy and Social Sciences (2022-ZSK024); Social Science Funding of Liaoning Province (L21CGL008).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data sharing not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Pörtner, H.O.; Roberts, D.C.; Adams, H.; Adler, C.; Aldunce, P.; Ali, E.; Ara Begum, R.; Betts, R.; Bezner Kerr, R.; Biesbroek, R.; et al. Climate Change 2022: Impacts, Adaptation and Vulnerability; IPCC: Geneva, Switzerland, 2022. [Google Scholar]
- United Nations United Nations Framework Convention on Climate Change. Treaty Series 1771. p. 107. Available online: https://treaties.un.org/doc/Publication/UNTS/Volume%201771/v1771.pdf (accessed on 23 January 2023).
- United Nations Paris Agreement. Treaty Series 3156. Available online: https://treaties.un.org/doc/Treaties/2016/02/20160215%2006-03%20PM/Ch_XXVII-7-d.pdf (accessed on 23 January 2023).
- Larsen, K.; Pitt, H.; Grant, M.; Houser, T. China’s Greenhouse Gas Emissions Exceeded the Developed World for the First Time in 2019; Rhodium Group: Washington, DC, USA, 2021. [Google Scholar]
- Xi Focus: Xi Announces China Aims to Achieve Carbon Neutrality before 2060. Available online: http://www.xinhuanet.com/english/2020-09/23/c_139388764.htm (accessed on 18 July 2022).
- Huaxia China Contributes to Global Carbon Emissions Reduction. Available online: http://www.news.cn/english/2021-11/09/c_1310300766.htm#:~:text=China’s%20carbon%20intensity%20in%202020,from%20the%20white%20paper%20showed (accessed on 13 September 2022).
- Climate Watch Data Explorer. Available online: https://www.climatewatchdata.org/data-explorer/historical-emissions?historical-emissions-data-sources=cait&historical-emissions-end_year=2019&historical-emissions-gases=co2&historical-emissions-regions=All%20Selected&historical-emissions-sectors=total-including-lucf%2Ctransportation&historical-emissions-start_year=2019&page=1&sort_col=country&sort_dir=DESC (accessed on 15 September 2022).
- Central Committee of the Communist Party of China; State Council. Transport Demand Set to Triple, but Sector Faces Potential Disruptions. Available online: https://www.itf-oecd.org/transport-demand-set-triple-sector-faces-potential-disruptions (accessed on 15 September 2022).
- IEA. Transport Sector CO2 Emissions by Mode in the Sustainable Development Scenario, 2000–2030. Available online: https://www.iea.org/data-and-statistics/charts/transport-sector-co2-emissions-by-mode-in-the-sustainable-development-scenario-2000-2030 (accessed on 15 September 2022).
- Climate Watch Data Explorer. Available online: https://www.climatewatchdata.org/data-explorer/historical-emissions?historical-emissions-data-sources=cait&historical-emissions-end_year=2019&historical-emissions-gases=co2&historical-emissions-regions=All%20Selected%2CCHN&historical-emissions-sectors=total-including-lucf%2Ctransportation&historical-emissions-start_year=2019&page=1&sort_col=country&sort_dir=DESC (accessed on 15 September 2022).
- Zhang, L.; Long, R.; Chen, H.; Geng, J. A Review of China’s Road Traffic Carbon Emissions. J. Clean. Prod. 2019, 207, 569–581. [Google Scholar] [CrossRef]
- Oh, J.J. The 500-Million-Vehicle Question: What Will It Take for China to Decarbonize Transport? Available online: https://blogs.worldbank.org/transport/500-million-vehicle-question-what-will-it-take-china-decarbonize-transport (accessed on 15 September 2022).
- Anastasiadou, K. Sustainable Mobility Driven Prioritization of New Vehicle Technologies, Based on a New Decision-Aiding Methodology. Sustainability 2021, 13, 4760. [Google Scholar] [CrossRef]
- Gallo, M.; Marinelli, M. Sustainable Mobility: A Review of Possible Actions and Policies. Sustainability 2020, 12, 7499. [Google Scholar] [CrossRef]
- Mak, H.-Y.; Rong, Y.; Shen, Z.-J.M. Infrastructure Planning for Electric Vehicles with Battery Swapping. Manag. Sci. 2013, 59, 1557–1575. [Google Scholar] [CrossRef]
- Choi, W.; Song, H.H. Well-to-Wheel Greenhouse Gas Emissions of Battery Electric Vehicles in Countries Dependent on the Import of Fuels through Maritime Transportation: A South Korean Case Study. Appl. Energy 2018, 230, 135–147. [Google Scholar] [CrossRef]
- Sun, X.; Luo, X.; Zhang, Z.; Meng, F.; Yang, J. Life Cycle Assessment of Lithium Nickel Cobalt Manganese Oxide (NCM) Batteries for Electric Passenger Vehicles. J. Clean. Prod. 2020, 273, 123006. [Google Scholar] [CrossRef]
- Paoli, L. Timur Gül Electric Cars Fend off Supply Challenges to More than Double Global Sales. Available online: https://www.iea.org/commentaries/electric-cars-fend-off-supply-challenges-to-more-than-double-global-sales (accessed on 21 September 2022).
- Jung, J.; Chow, J.Y.J.; Jayakrishnan, R.; Park, J.Y. Stochastic Dynamic Itinerary Interception Refueling Location Problem with Queue Delay for Electric Taxi Charging Stations. Transp. Res. Part C Emerg. Technol. 2014, 40, 123–142. [Google Scholar] [CrossRef]
- Hensher, D.A.; Button, K.J. (Eds.) Handbook of Transport and the Environment; Handbooks in Transport; Emerald Group Publishing Limited: Bingley, UK, 2003; Volume 4, ISBN 978-0-08-044103-0. [Google Scholar]
- Liu, L.; Miller, H.J.; Scheff, J. The Impacts of COVID-19 Pandemic on Public Transit Demand in the United States. PLoS ONE 2020, 15, e0242476. [Google Scholar] [CrossRef]
- Urban Passenger Transport. Available online: https://www.mot.gov.cn/tongjishuju/chengshikeyun/ (accessed on 24 January 2023).
- Lee, Y.; Lee, B. What’s Eating Public Transit in the United States? Reasons for Declining Transit Ridership in the 2010s. Transp. Res. Part A Policy Pract. 2022, 157, 126–143. [Google Scholar] [CrossRef]
- Martin, E.; Shaheen, S.A.; Lidicker, J. Impact of Carsharing on Household Vehicle Holdings: Results from North American Shared-Use Vehicle Survey. Transp. Res. Rec. 2010, 2143, 150–158. [Google Scholar] [CrossRef]
- GeSI. Global E-Sustainability Initiative SMART 2020: Enabling the Low Carbon Economy in the Information Age. 2008. Available online: https://gesi.org/research/download/7 (accessed on 23 January 2023).
- He, L.; Mak, H.-Y.; Rong, Y.; Shen, Z.-J.M. Service Region Design for Urban Electric Vehicle Sharing Systems. Manuf. Serv. Oper. Manag. 2017, 19, 309–327. [Google Scholar] [CrossRef]
- Miao, H.; Jia, H.; Li, J.; Qiu, T.Z. Autonomous Connected Electric Vehicle (ACEV)-Based Car-Sharing System Modeling and Optimal Planning: A Unified Two-Stage Multi-Objective Optimization Methodology. Energy 2018, 169, 797–818. [Google Scholar] [CrossRef]
- On-Road Automated Driving (ORAD) Committee. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles; SAE International: Warrendale, PA, USA, 2018. [Google Scholar]
- Naufal, J.K.; Camargo, J.B.; Vismari, L.F.; de Almeida, J.R.; Molina, C.; González, R.I.R.; Inam, R.; Fersman, E. A2CPS: A Vehicle-Centric Safety Conceptual Framework for Autonomous Transport Systems. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1925–1939. [Google Scholar] [CrossRef]
- Liu, J.; Kockelman, K.; Nichols, A. Anticipating the Emissions Impacts of Smoother Driving by Connected and Autonomous Vehicles, Using the MOVES Model. In Proceedings of the Transportation Research Board 96th Annual Meeting, Washington, DC, USA, 8–12 January 2017. [Google Scholar]
- Conlon, J.; Ballare, S.; Lin, J. Analysis of Environmental Impacts of Autonomous Vehicles. 2018. Available online: https://trid.trb.org/view/1497431 (accessed on 23 January 2023).
- Wang, Z.; Wu, G.; Barth, M.J. Cooperative Eco-Driving at Signalized Intersections in a Partially Connected and Automated Vehicle Environment. IEEE Trans. Intell. Transp. Syst. 2020, 21, 2029–2038. [Google Scholar] [CrossRef]
- Guo, Y.; Xu, H.; Zhang, Y.; Yao, D. Integrated Variable Speed Limits and Lane-Changing Control for Freeway Lane-Drop Bottlenecks. IEEE Access 2020, 8, 54710–54721. [Google Scholar] [CrossRef]
- Ma, F.; Yang, Y.; Wang, J.; Liu, Z.; Li, J.; Nie, J.; Shen, Y.; Wu, L. Predictive Energy-Saving Optimization Based on Nonlinear Model Predictive Control for Cooperative Connected Vehicles Platoon with V2V Communication. Energy 2019, 189, 116120. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K. Preparing a Nation for Autonomous Vehicles: Opportunities, Barriers and Policy Recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Milakis, D.; van Arem, B.; van Wee, B. Policy and Society Related Implications of Automated Driving: A Review of Literature and Directions for Future Research. J. Intell. Transp. Syst. 2017, 21, 324–348. [Google Scholar] [CrossRef]
- Harper, C.D.; Hendrickson, C.T.; Mangones, S.; Samaras, C. Estimating Potential Increases in Travel with Autonomous Vehicles for the Non-Driving, Elderly and People with Travel-Restrictive Medical Conditions. Transp. Res. Part C Emerg. Technol. 2016, 72, 1–9. [Google Scholar] [CrossRef]
- Kopelias, P.; Demiridi, E.; Vogiatzis, K.; Skabardonis, A.; Zafiropoulou, V. Connected & Autonomous Vehicles—Environmental Impacts—A Review. Sci. Total Environ. 2020, 712, 135237. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K.M. The Travel and Environmental Implications of Shared Autonomous Vehicles, Using Agent-Based Model Scenarios. Transp. Res. Part C Emerg. Technol. 2014, 40, 1–13. [Google Scholar] [CrossRef]
- Liang, X.; Homem de Almeida Correia, G.; van Arem, B. Applying a Model for Trip Assignment and Dynamic Routing of Automated Taxis with Congestion: System Performance in the City of Delft, The Netherlands. Transp. Res. Rec. 2018, 2672, 588–598. [Google Scholar] [CrossRef]
- Zhao, L.; Malikopoulos, A.A. Enhanced Mobility with Connectivity and Automation: A Review of Shared Autonomous Vehicle Systems. arXiv 2019, arXiv:1905.12602. [Google Scholar] [CrossRef]
- Bauer, G.S.; Greenblatt, J.B.; Gerke, B.F. Cost, Energy, and Environmental Impact of Automated Electric Taxi Fleets in Manhattan. Environ. Sci. Technol. 2018, 52, 4920–4928. [Google Scholar] [CrossRef] [PubMed]
- California Department of Motor Vehicles. 2021 Disengagement Reports. Available online: https://www.dmv.ca.gov/portal/vehicle-industry-services/autonomous-vehicles/disengagement-reports/ (accessed on 26 September 2022).
- State Council of the People’s Republic of China. Notice of the State Council on Issuing the “Made in China (2025)”. Available online: http://www.gov.cn/zhengce/content/2015-05/19/content_9784.htm (accessed on 27 September 2022).
- Central Committee of the Communist Party of China; State Council. The CPC Central Committee and the State Council Issue the Program of Building National Strength in Transportation. Available online: http://www.gov.cn/zhengce/2019-09/19/content_5431432.htm (accessed on 27 September 2022).
- China Society of Automotive Engineers. Technology Roadmap for Energy Saving and New Energy Vehicle 2.0; China Machine Press: Beijing, China, 2021; ISBN 978-7-111-67009-4. [Google Scholar]
- Central Committee of the Communist Party of China; State Council. The CPC Central Committee and the State Council Issue the National Comprehensive Three-Dimensional Transportation Network Planning Outline. Available online: http://www.gov.cn/gongbao/content/2021/content_5593440.htm (accessed on 27 September 2022).
- Ministry of Industry and Information Technology; Ministry of Transport; Standardization Administration Notice of Ministry of Industry and Information Technology; Ministry of Transport. Standardization Administration on Issuing the “Guidelines for the Construction of the National Internet of Vehicles Industry Standard System (Intelligent Transportation)”. Available online: http://www.gov.cn/zhengce/zhengceku/2021-03/20/content_5594095.htm (accessed on 27 September 2022).
- National People’s Congress Outline of the 14th Five-Year Plan (2021–2025) for National Economic and Social Development and Vision 2035 of the People’s Republic of China. Available online: http://www.gov.cn/xinwen/2021-03/13/content_5592681.htm (accessed on 27 September 2022).
- Cartenì, A. The Acceptability Value of Autonomous Vehicles: A Quantitative Analysis of the Willingness to Pay for Shared Autonomous Vehicles (SAVs) Mobility Services. Transp. Res. Interdiscip. Perspect. 2020, 8, 100224. [Google Scholar] [CrossRef]
- Jing, P.; Xu, G.; Chen, Y.; Shi, Y.; Zhan, F. The Determinants behind the Acceptance of Autonomous Vehicles: A Systematic Review. Sustainability 2020, 12, 1719. [Google Scholar] [CrossRef]
- Cascetta, E.; Cartenì, A.; Di Francesco, L. Do Autonomous Vehicles Drive like Humans? A Turing Approach and an Application to SAE Automation Level 2 Cars. Transp. Res. Part C Emerg. Technol. 2022, 134, 103499. [Google Scholar] [CrossRef]
- Anderson, J.M.; Kalra, N.; Stanley, K.D.; Sorensen, P.; Samaras, C.; Oluwatola, O.A. Autonomous Vehicle Technology: A Guide for Policymakers; Rand Corporation: Santa Monica, CA, USA, 2014; ISBN 978-0-8330-8398-2. [Google Scholar]
- Plumer, B. Will Driverless Cars Solve Our Energy Problems—Or Just Create New Ones? Available online: https://www.washingtonpost.com/news/wonk/wp/2013/03/30/will-self-driving-cars-solve-all-our-energy-problems-or-create-new-ones/ (accessed on 29 January 2023).
- Litman, T. Autonomous Vehicle Implementation Predictions: Implications for Transport Planning. 2023. Available online: https://www.vtpi.org/avip.pdf (accessed on 23 January 2023).
- Shladover, S.E.; Su, D.; Lu, X.-Y. Impacts of Cooperative Adaptive Cruise Control on Freeway Traffic Flow. Transp. Res. Rec. 2012, 2324, 63–70. [Google Scholar] [CrossRef]
- American Association of State Highway and Transportation. Officials Real Transportation Solutions for Greenhouse Gas Emissions Reductions. Available online: http://climatechange.transportation.org/pdf/realsolutionsreport.pdf (accessed on 23 January 2023).
- Brown, A.; Repac, B.; Gonder, J. Autonomous Vehicles Have a Wide Range of Possible Energy Impacts (Poster); National Renewable Energy Lab. (NREL): Golden, CO, USA, 2013. [Google Scholar]
- Wang, Z.; Bian, Y.; Shladover, S.E.; Wu, G.; Li, S.E.; Barth, M.J. A Survey on Cooperative Longitudinal Motion Control of Multiple Connected and Automated Vehicles. IEEE Intell. Transport. Syst. Mag. 2020, 12, 4–24. [Google Scholar] [CrossRef]
- Bento, L.C.; Parafita, R.; Rakha, H.A.; Nunes, U.J. A Study of the Environmental Impacts of Intelligent Automated Vehicle Control at Intersections via V2V and V2I Communications. J. Intell. Transp. Syst. 2019, 23, 41–59. [Google Scholar] [CrossRef]
- Bichiou, Y.; Rakha, H.A. Developing an Optimal Intersection Control System for Automated Connected Vehicles. IEEE Trans. Intell. Transport. Syst. 2019, 20, 1908–1916. [Google Scholar] [CrossRef]
- Chen, W.; Liu, Y. Gap-Based Automated Vehicular Speed Guidance towards Eco-Driving at an Unsignalized Intersection. Transp. B Transp. Dyn. 2019, 7, 147–168. [Google Scholar] [CrossRef]
- Feng, Y.; Yu, C.; Liu, H.X. Spatiotemporal Intersection Control in a Connected and Automated Vehicle Environment. Transp. Res. Part C Emerg. Technol. 2018, 89, 364–383. [Google Scholar] [CrossRef]
- Filocamo, B.; Ruiz, J.A.; Sotelo, M.A. Efficient Management of Road Intersections for Automated Vehicles—The FRFP System Applied to the Various Types of Intersections and Roundabouts. Appl. Sci. 2019, 10, 316. [Google Scholar] [CrossRef]
- Li, Z.R.; Chitturi, M.V.; Yu, L.; Bill, A.R.; Noyce, D.A. Sustainability Effects of Next-Generation Intersection Control for Autonomous Vehicles. Transport 2015, 30, 342–352. [Google Scholar] [CrossRef]
- Lin, P.; Liu, J.; Jin, P.J.; Ran, B. Autonomous Vehicle-Intersection Coordination Method in a Connected Vehicle Environment. IEEE Intell. Transport. Syst. Mag. 2017, 9, 37–47. [Google Scholar] [CrossRef]
- Stebbins, S.; Hickman, M.; Kim, J.; Vu, H.L. Characterising Green Light Optimal Speed Advisory Trajectories for Platoon-Based Optimisation. Transp. Res. Part C Emerg. Technol. 2017, 82, 43–62. [Google Scholar] [CrossRef]
- Wang, C.; Dai, Y.; Xia, J. A CAV Platoon Control Method for Isolated Intersections: Guaranteed Feasible Multi-Objective Approach with Priority. Energies 2020, 13, 625. [Google Scholar] [CrossRef]
- Tsugawa, S. An Overview on an Automated Truck Platoon within the Energy ITS Project. IFAC Proc. Vol. 2013, 46, 41–46. [Google Scholar] [CrossRef]
- Peloton Safety & Efficiency: Truck Platooning. Available online: https://peloton-tech.com/ (accessed on 31 January 2023).
- Nieuwenhuijsen, J.; Correia, G.H. de A.; Milakis, D.; van Arem, B.; van Daalen, E. Towards a Quantitative Method to Analyze the Long-Term Innovation Diffusion of Automated Vehicles Technology Using System Dynamics. Transp. Res. Part C Emerg. Technol. 2018, 86, 300–327. [Google Scholar] [CrossRef]
- Chen, Z.; He, F.; Yin, Y.; Du, Y. Optimal Design of Autonomous Vehicle Zones in Transportation Networks. Transp. Res. Part B Methodol. 2017, 99, 44–61. [Google Scholar] [CrossRef]
- Barcham, R. Climate and Energy Impacts of Automated Vehicles; California Air Resources Board: Sacramento, CA, USA, 2014; Available online: https://ww2.arb.ca.gov/sites/default/files/2020-06/automated_vehicles_climate_july2014_final1.pdf (accessed on 23 January 2023).
- Stern, R.E.; Chen, Y.; Churchill, M.; Wu, F.; Delle Monache, M.L.; Piccoli, B.; Seibold, B.; Sprinkle, J.; Work, D.B. Quantifying Air Quality Benefits Resulting from Few Autonomous Vehicles Stabilizing Traffic. Transp. Res. Part D Transp. Environ. 2019, 67, 351–365. [Google Scholar] [CrossRef]
- Mattas, K.; Makridis, M.; Hallac, P.; Raposo, M.A.; Thiel, C.; Toledo, T.; Ciuffo, B. Simulating Deployment of Connectivity and Automation on the Antwerp Ring Road. IET Intell. Transp. Syst. 2018, 12, 1036–1044. [Google Scholar] [CrossRef]
- Bandeira, J.M.; Macedo, E.; Fernandes, P.; Rodrigues, M.; Andrade, M.; Coelho, M.C. Potential Pollutant Emission Effects of Connected and Automated Vehicles in a Mixed Traffic Flow Context for Different Road Types. IEEE Open J. Intell. Transp. Syst. 2021, 2, 364–383. [Google Scholar] [CrossRef]
- Hwang, H.; Song, C.-K. Changes in Air Pollutant Emissions from Road Vehicles Due to Autonomous Driving Technology: A Conceptual Modeling Approach. Environ. Eng. Res. 2019, 25, 366–373. [Google Scholar] [CrossRef]
- Li, D.; Wagner, P. Impacts of Gradual Automated Vehicle Penetration on Motorway Operation: A Comprehensive Evaluation. Eur. Transp. Res. Rev. 2019, 11, 36. [Google Scholar] [CrossRef]
- Makridis, M.; Mattas, K.; Mogno, C.; Ciuffo, B.; Fontaras, G. The Impact of Automation and Connectivity on Traffic Flow and CO2 Emissions. A Detailed Microsimulation Study. Atmos. Environ. 2020, 226, 117399. [Google Scholar] [CrossRef]
- Cohen, A.; Shaheen, S. Planning for Shared Mobility; UC: Berkeley, CA, USA, 2018. [Google Scholar]
- Martin, E.; Shaheen, S. The Impacts of Car2go on Vehicle Ownership, Modal Shift, Vehicle Miles Traveled, and Greenhouse Gas Emissions: An Analysis of Five North American Cities; Transportation Sustainability Research Center: Berkeley, CA, USA, 2016. [Google Scholar]
- Martin, E.; Shaheen, S. The Impact of Carsharing on Public Transit and Non-Motorized Travel: An Exploration of North American Carsharing Survey Data. Energies 2011, 4, 2094–2114. [Google Scholar] [CrossRef]
- Guo, G.; Xu, T. Vehicle Rebalancing with Charging Scheduling in One-Way Car-Sharing Systems. IEEE Trans. Intell. Transport. Syst. 2021, 23, 4342–4351. [Google Scholar] [CrossRef]
- Greenblatt, J.B.; Saxena, S. Autonomous Taxis Could Greatly Reduce Greenhouse-Gas Emissions of US Light-Duty Vehicles. Nat. Clim. Change 2015, 5, 860–863. [Google Scholar] [CrossRef]
- Lokhandwala, M.; Cai, H. Dynamic Ride Sharing Using Traditional Taxis and Shared Autonomous Taxis: A Case Study of NYC. Transp. Res. Part C Emerg. Technol. 2018, 97, 45–60. [Google Scholar] [CrossRef]
- Liu, J.; Kockelman, K.M.; Boesch, P.M.; Ciari, F. Tracking a System of Shared Autonomous Vehicles across the Austin, Texas Network Using Agent-Based Simulation. Transportation 2017, 44, 1261–1278. [Google Scholar] [CrossRef]
- Martinez, L.M.; Viegas, J.M. Assessing the Impacts of Deploying a Shared Self-Driving Urban Mobility System: An Agent-Based Model Applied to the City of Lisbon, Portugal. Int. J. Transp. Sci. Technol. 2017, 6, 13–27. [Google Scholar] [CrossRef]
- Woodcock, J.; Banister, D.; Edwards, P.; Prentice, A.M.; Roberts, I. Energy and Transport. Lancet 2007, 370, 1078–1088. [Google Scholar] [CrossRef] [PubMed]
- Neves, A.; Brand, C. Assessing the Potential for Carbon Emissions Savings from Replacing Short Car Trips with Walking and Cycling Using a Mixed GPS-Travel Diary Approach. Transp. Res. Part A Policy Pract. 2019, 123, 130–146. [Google Scholar] [CrossRef]
- Creger, H.; Espino, J.; Sanchez, A.S. Autonomous Vehicle Heaven or Hell? Creating a Transportation Revolution that Benefits All; Greenlining Institute: Oakland, CA, USA, 2019. [Google Scholar]
- Booth, L.; Norman, R.; Pettigrew, S. The Potential Implications of Autonomous Vehicles for Active Transport. J. Transp. Health 2019, 15, 100623. [Google Scholar] [CrossRef]
- May, A.D. The Potential Impacts of Automated Cars on Urban Transport: An Exploratory Analysis. Transp. Res. Procedia 2018. [Google Scholar] [CrossRef]
- Wang, A.; Stogios, C.; Gai, Y.; Vaughan, J.; Ozonder, G.; Lee, S.; Posen, I.D.; Miller, E.J.; Hatzopoulou, M. Automated, Electric, or Both? Investigating the Effects of Transportation and Technology Scenarios on Metropolitan Greenhouse Gas Emissions. Sustain. Cities Soc. 2018, 40, 524–533. [Google Scholar] [CrossRef]
- Oke, J.B.; Akkinepally, A.P.; Chen, S.; Xie, Y.; Aboutaleb, Y.M.; Azevedo, C.L.; Zegras, P.C.; Ferreira, J.; Ben-Akiva, M. Evaluating the Systemic Effects of Automated Mobility-on-Demand Services via Large-Scale Agent-Based Simulation of Auto-Dependent Prototype Cities. Transp. Res. Part A Policy Pract. 2020, 140, 98–126. [Google Scholar] [CrossRef]
- Bansal, P.; Kockelman, K.M. Forecasting Americans’ Long-Term Adoption of Connected and Autonomous Vehicle Technologies. Transp. Res. Part A Policy Pract. 2017, 95, 49–63. [Google Scholar] [CrossRef]
- Bansal, P.; Kockelman, K.M.; Singh, A. Assessing Public Opinions of and Interest in New Vehicle Technologies: An Austin Perspective. Transp. Res. Part C Emerg. Technol. 2016, 67, 1–14. [Google Scholar] [CrossRef]
- Zakharenko, R. Self-Driving Cars Will Change Cities. Reg. Sci. Urban Econ. 2016, 61, 26–37. [Google Scholar] [CrossRef]
- Rybeck, R. Using Value Capture to Finance Infrastructure and Encourage Compact Development. Public Work. Manag. Policy 2004, 8, 249–260. [Google Scholar] [CrossRef]
- Zhang, W.; Guhathakurta, S.; Fang, J.; Zhang, G. Exploring the Impact of Shared Autonomous Vehicles on Urban Parking Demand: An Agent-Based Simulation Approach. Sustain. Cities Soc. 2015, 19, 34–45. [Google Scholar] [CrossRef]
- Zhang, W.; Guhathakurta, S. Parking Spaces in the Age of Shared Autonomous Vehicles: How Much Parking Will We Need and Where? Transp. Res. Rec. 2017, 2651, 80–91. [Google Scholar] [CrossRef]
- Nourinejad, M.; Bahrami, S.; Roorda, M.J. Designing Parking Facilities for Autonomous Vehicles. Transp. Res. Part B Methodol. 2018, 109, 110–127. [Google Scholar] [CrossRef]
- Chester, M.; Horvath, A.; Madanat, S. Parking Infrastructure: Energy, Emissions, and Automobile Life-Cycle Environmental Accounting. Environ. Res. Lett. 2010, 5, 034001. [Google Scholar] [CrossRef]
- Shen, T.; Hong, Y.; Thompson, M.M.; Liu, J.; Huo, X.; Wu, L. How Does Parking Availability Interplay with the Land Use and Affect Traffic Congestion in Urban Areas? The Case Study of Xi’an, China. Sustain. Cities Soc. 2020, 57, 102126. [Google Scholar] [CrossRef]
- Central Committee of the Communist Party of China; State Council The Working Guidance for Carbon Dioxide Peaking and Carbon Neutrality in Full and Faithful Implementation of the New Development Philosophy. Available online: http://www.gov.cn/zhengce/2021-10/24/content_5644613.htm (accessed on 13 December 2022).
- Action Plan for Carbon Dioxide Peaking before 2030. Available online: http://www.news.cn/english/2021-10/27/c_1310270985.htm (accessed on 23 January 2023).
- Ministry of Transport of China; National Railway Administration; Civil Aviation Administration of China. State Post Bureau Guidelines by the Ministry of Transport, National Railway Administration, Civil Aviation Administration of China, and State Post Bureau on Implementing the Guidelines of the Central Committee of the Communist Party and State Council on Implementing the New Development Concept in a Complete, Accurate and Comprehensive Manner to Achieve Peak Carbon and Carbon Neutrality. Available online: https://xxgk.mot.gov.cn/2020/jigou/zhghs/202206/t20220624_3659984.html (accessed on 5 February 2023).
- Ministry of Industry and Information Technology of the People’s Republic of China. Limits of Fuel Consumption for Passenger Cars (GB 19578-2004). Available online: https://openstd.samr.gov.cn/bzgk/gb/newGbInfo?hcno=C5AF8923E22DCAC3FB4E51044C40ACF1 (accessed on 2 November 2022).
- Ministry of Industry and Information Technology of the People’s Republic of China. Fuel Consumption Evaluation Methods and Targets for Passenger Cars (GB 27999-2011). Available online: https://openstd.samr.gov.cn/bzgk/gb/newGbInfo?hcno=837E66B0DDB028E355294EC3B0447577 (accessed on 2 November 2022).
- Ministry of Industry and Information Technology of the People’s Republic of China. Fuel Consumption Evaluation Methods and Targets for Passenger Cars (GB 27999-2014). Available online: https://openstd.samr.gov.cn/bzgk/gb/newGbInfo?hcno=8ED75108A1F2930FB5D2DE70E5B607D4 (accessed on 2 November 2022).
- Ministry of Industry and Information Technology of the People’s Republic of China. Limits of Fuel Consumption for Passenger Cars (GB 19578-2014). Available online: https://openstd.samr.gov.cn/bzgk/gb/newGbInfo?hcno=31BB21B694B4A673840F61F38031E756 (accessed on 2 November 2022).
- Ministry of Industry and Information Technology. Fuel Consumption Limits for Passenger Cars. Available online: https://openstd.samr.gov.cn/bzgk/gb/newGbInfo?hcno=57DA347FDF48E4743786873E5B2D670A (accessed on 21 October 2022).
- Ministry of Industry and Information Technology. Fuel Consumption Evaluation Methods and Targets for Passenger Cars. Available online: https://openstd.samr.gov.cn/bzgk/gb/newGbInfo?hcno=A0D5C7C6DE851F1FB293B6CA09C757EB (accessed on 21 October 2022).
- National Development & Reform Commission; Office of the Central Cyberspace Affairs Commission; Ministry of Science & Technology; Ministry of Industry & Information Technology; Ministry of Public Security; Ministry of Finance; Ministry of Natural Resources; Ministry of Housing & Urban-Rural Development; Ministry of Transport; Ministry of Commerce; et al. Notice of Issuing the Strategies for the Innovative Development of Intelligent Vehicles. Available online: http://www.gov.cn/zhengce/zhengceku/2020-02/24/content_5482655.htm (accessed on 10 February 2023).
- Ministry of Transport. Guiding Opinions of the Ministry of Transport on Promoting the Development and Application of Autonomous Driving Technology in Road Traffic. Available online: http://www.gov.cn/zhengce/zhengceku/2020-12/30/content_5575422.htm (accessed on 10 February 2023).
- Transparency Market Research Robo-Taxi Market Growth, Forecast 2022–2031. Available online: https://www.transparencymarketresearch.com/robo-taxi-market.html (accessed on 12 January 2023).
- IHS Markit. Outlook of Autonomous Driving and Future Mobility Services Market in China. 2021, p. 32. Available online: https://www.miivii.com/pdf/China-s-autonomous-driving-and-future-mobility-service-market-outlook.pdf (accessed on 23 January 2023).
- Ministry of Transport. Guidance on Transportation Safety Services for Autonomous Vehicles (Trial) (Draft for Comments). Available online: https://xxgk.mot.gov.cn/2020/jigou/ysfws/202208/t20220808_3662374.html (accessed on 12 January 2023).
- Wang, N. Assessment of the Incentives on Electric Vehicle Promotion in China. Transp. Res. Part A Policy Pract. 2017, 101, 177–189. [Google Scholar] [CrossRef]
- Zheng, Z. Shenzhen Taxi Basically Realized Pure Electric. Available online: https://baijiahao.baidu.com/s?id=1621692868221552013&wfr=spider&for=pc (accessed on 13 January 2023).
- Ministry of Transportation; Ministry of Industry and Information Technology; Ministry of Public Security; Ministry of Commerce; State Administration of Industry and Commerce; State Administration of Food and Drug Inspection; National Office for Central Cyberspace. Affairs Interim Provision on the Operation Management of Car Hailing Services. Available online: http://www.gov.cn/xinwen/2016-07/28/content_5095584.htm (accessed on 13 January 2023).
- The Ministry of Public Security of the People’s Republic of China. Notice of the Road Traffic Safety Law (Revised Draft Proposals) for Public Consultation. Available online: http://www.gov.cn/hudong/2021-04/03/content_5597682.htm (accessed on 15 January 2023).
- Ministry of Transportation; Publicity Department of the CPC Central Committee; Ministry of Public Security; Office of the Central Leading Group for Cyberspace Affairs; State Administration of Industry and Commerce; National Development and Reform Commission; Ministry of Human Resources and Social Security; All-China Federation of Trade Unions. Opinions on Strengthening the Protection of the Rights and Interests of Employees in the New Mode of Transport. Available online: http://www.gov.cn/zhengce/zhengceku/2021-11/30/content_5654949.htm (accessed on 15 January 2023).
- Litman, T. Transit Price Elasticities and Cross—Elasticities. JPT 2004, 7, 37–58. [Google Scholar] [CrossRef]
- Ministry of Transport. China Urban Passenger Transport Development Report; China Communications Press: Beijing, China, 2017. [Google Scholar]
- Jo, H. Impacts of Urban Greenspace on Offsetting Carbon Emissions for Middle Korea. J. Environ. Manag. 2002, 64, 115–126. [Google Scholar] [CrossRef] [PubMed]
- Business Opportunities at Intertraffic China|Parking. Available online: https://www.intertraffic.com/china/exhibiting/market/parking/ (accessed on 4 January 2023).


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).