
Optimizing Traffic Flow in Smart Cities: Soft GRU-Based Recurrent Neural Networks for Enhanced Congestion Prediction Using Deep Learning


 ,
, 
Abstract
:1. Introduction
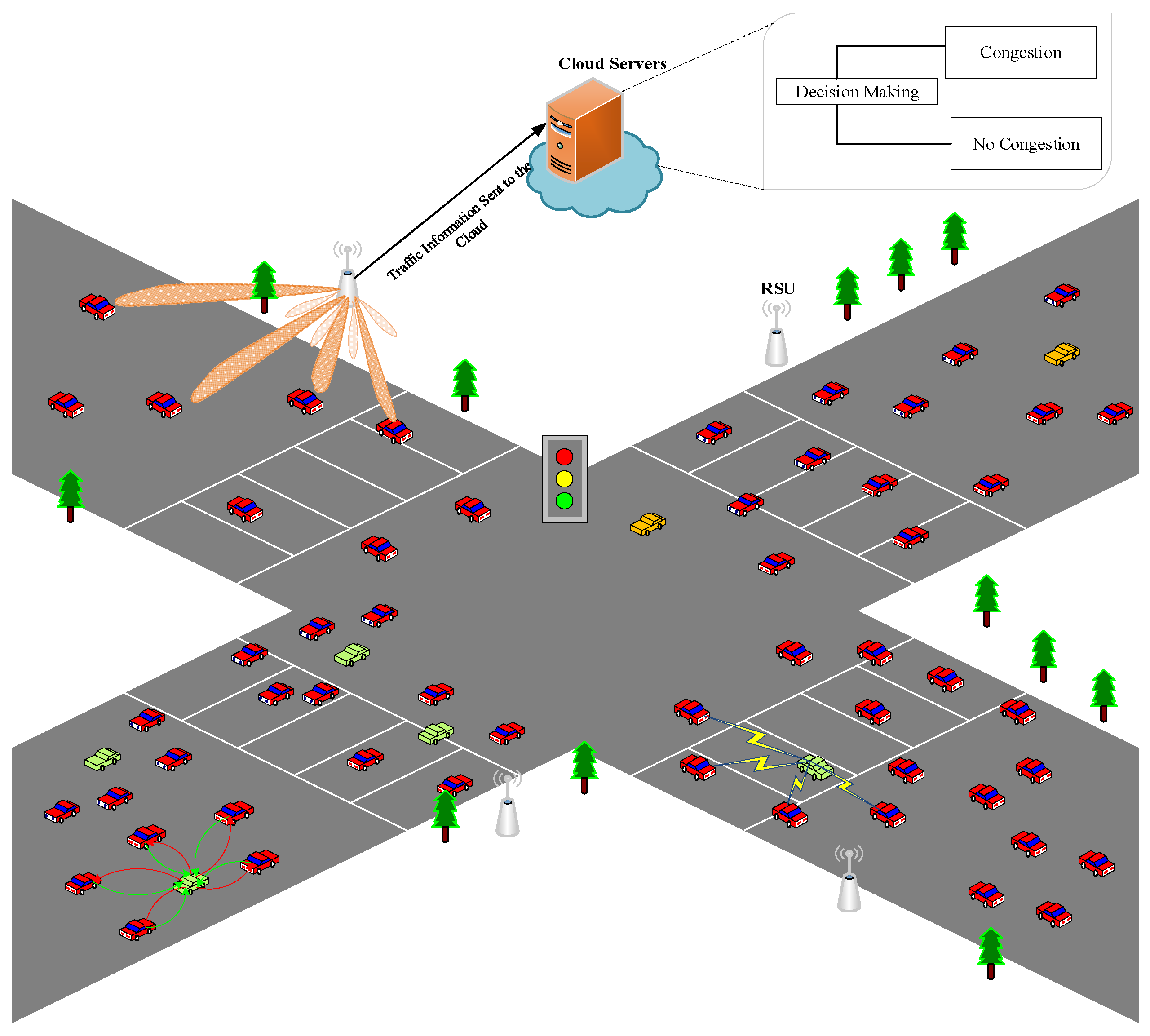
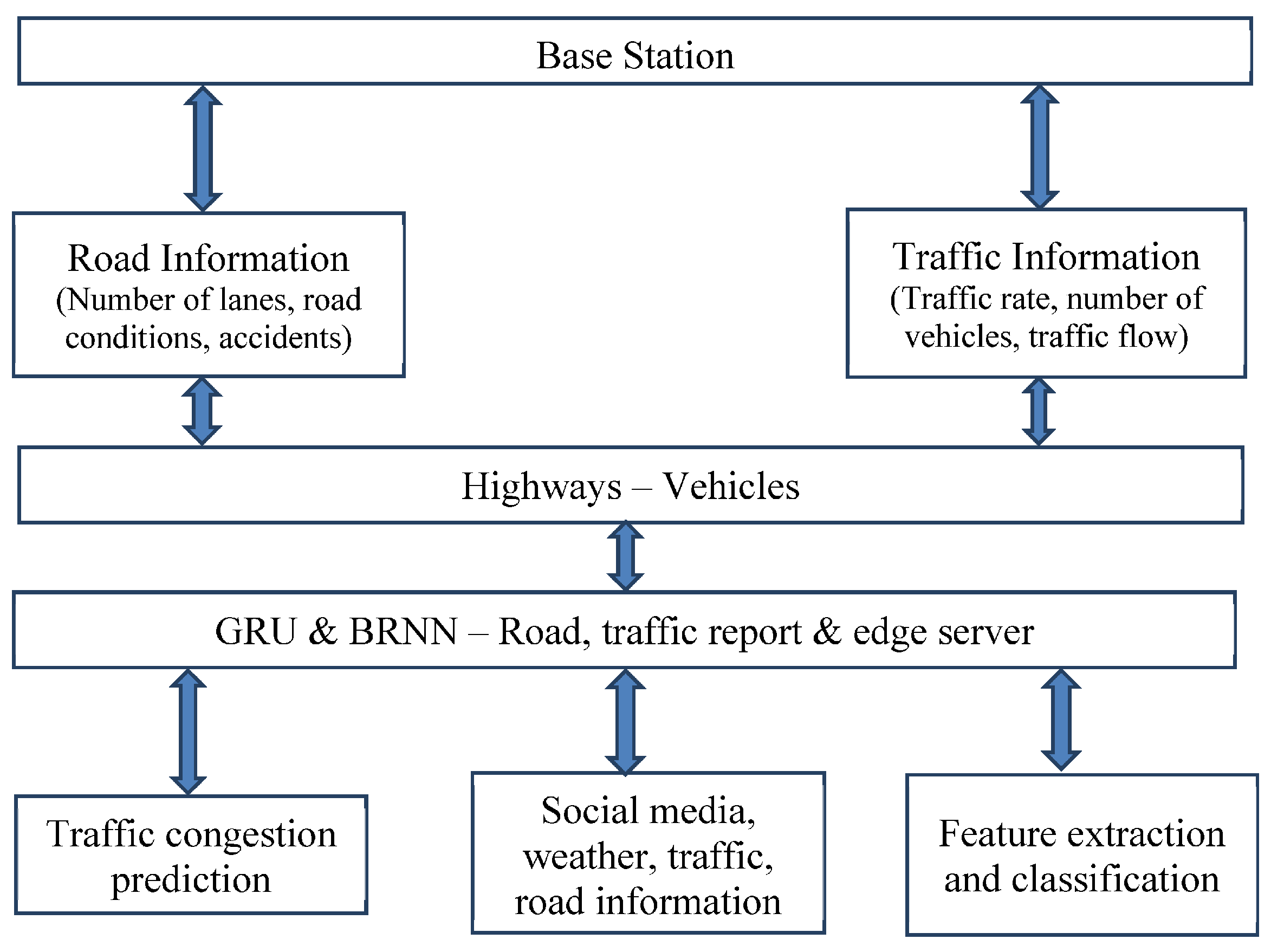
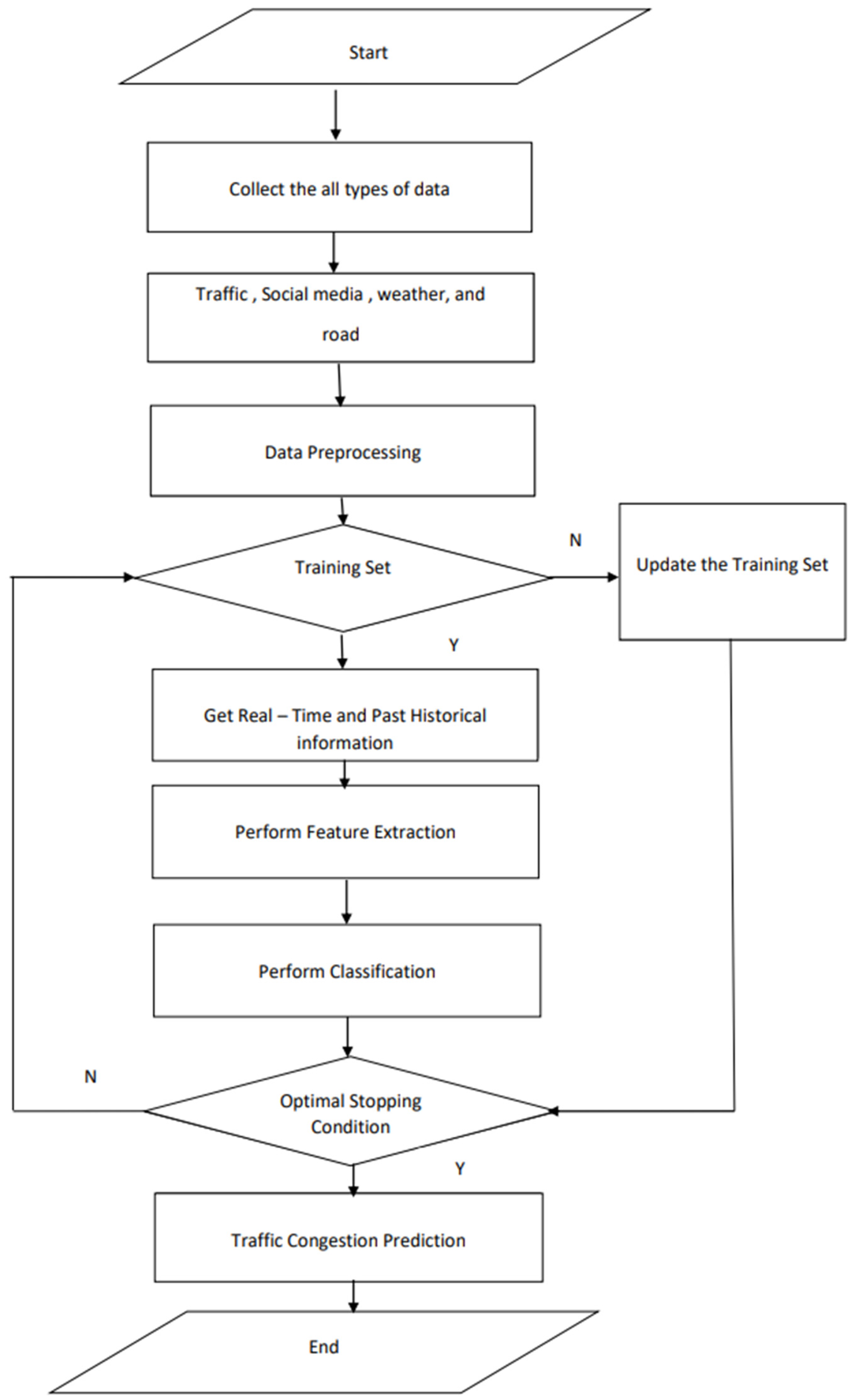
- First, an edge-based vehicular environment is considered to predict road traffic. Edge servers store past historical and real-time information about the user’s social media, weather information, road traffic information, and road conditions information.
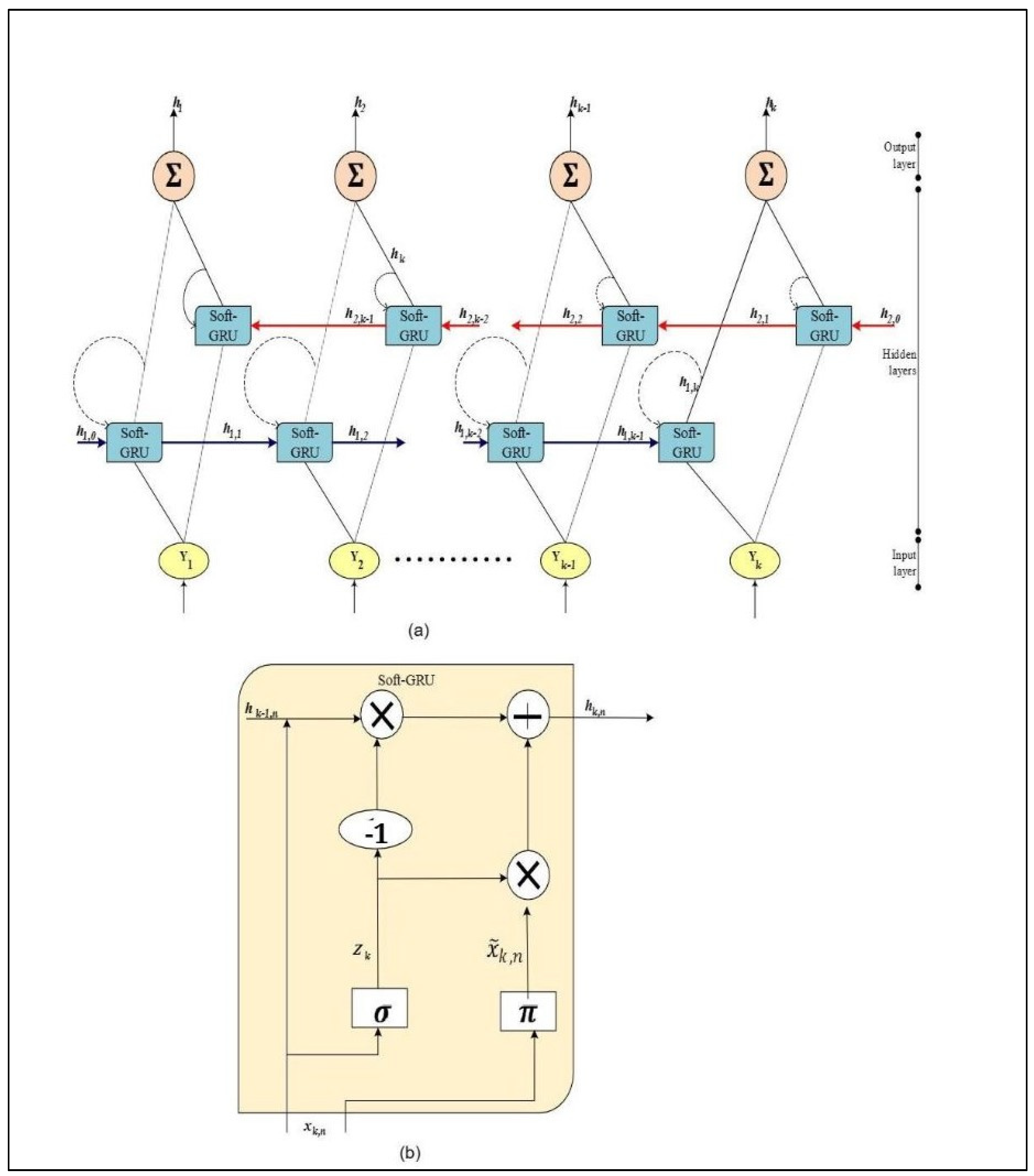
- Second, multiple features are extracted using DL architecture, i.e., BRNN with the soft GRU, with that information classified into two classes, congested or not.
- Third, an optimization approach is proposed for optimizing the hyperparameters of DL architecture according to the real-time and past traffic data.
2. Preliminary Knowledge
Motivation and Application
3. Literature Review
4. Research Gaps
5. Proposed Methodology
| Algorithm 1. Bidirectional LSTM |
| Load the data |
| Initialize the batch size, number of steps, and number of devices |
| Training the iterations with load data time |
| Define the bidirectional LSTM model for setting bidirectional is equal to true |
| Define the number of hidden layers, and the number of layers |
| Process LSTM layer (LSTM.LSTM (No. Hidden, No. layers, Bidirectional=true) |
| Update the result of the RNN model |
| Train the procedure from steps 1 to 7 |
| Define the number of iterations |
| Provide training results of BRN |
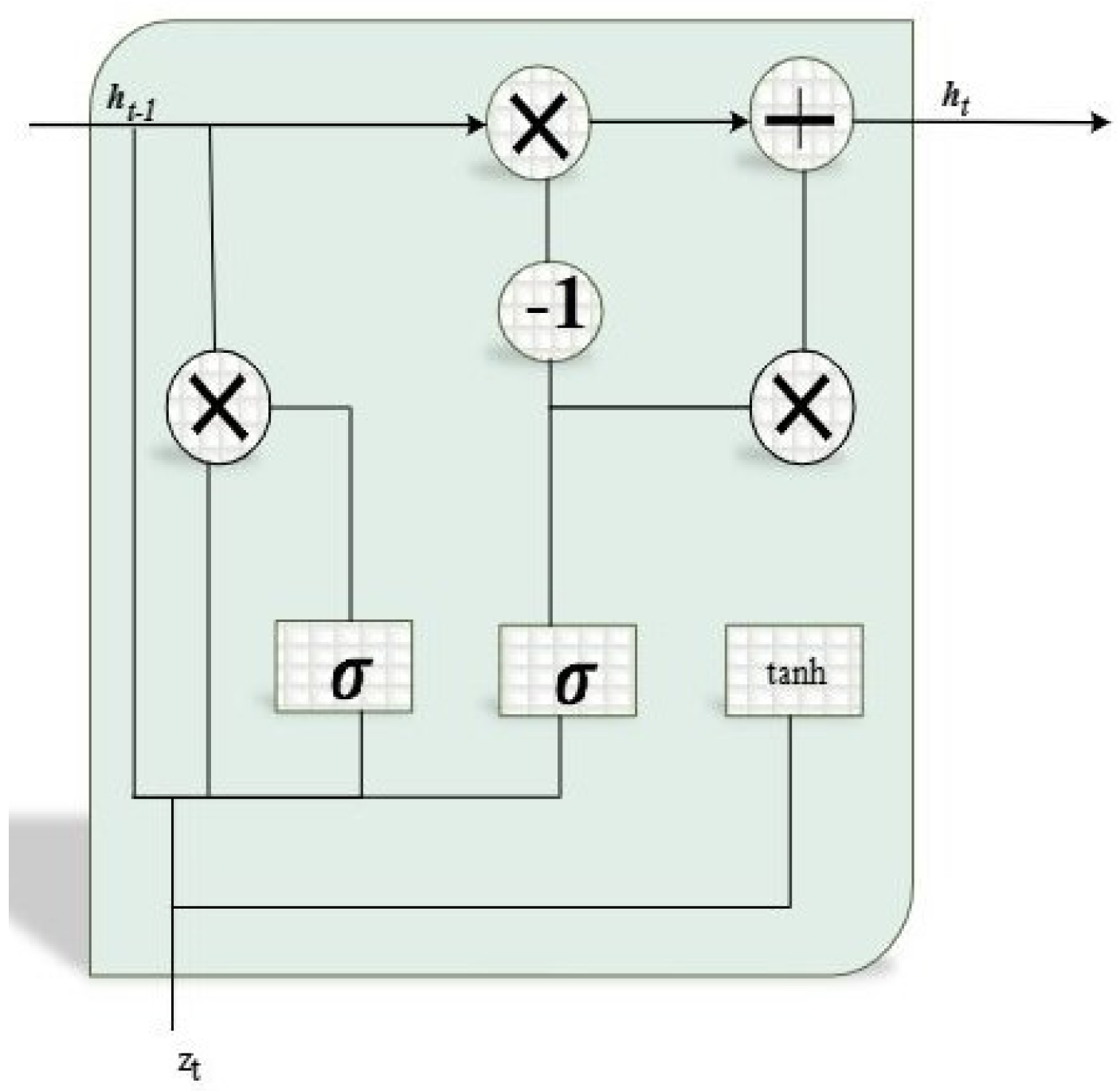
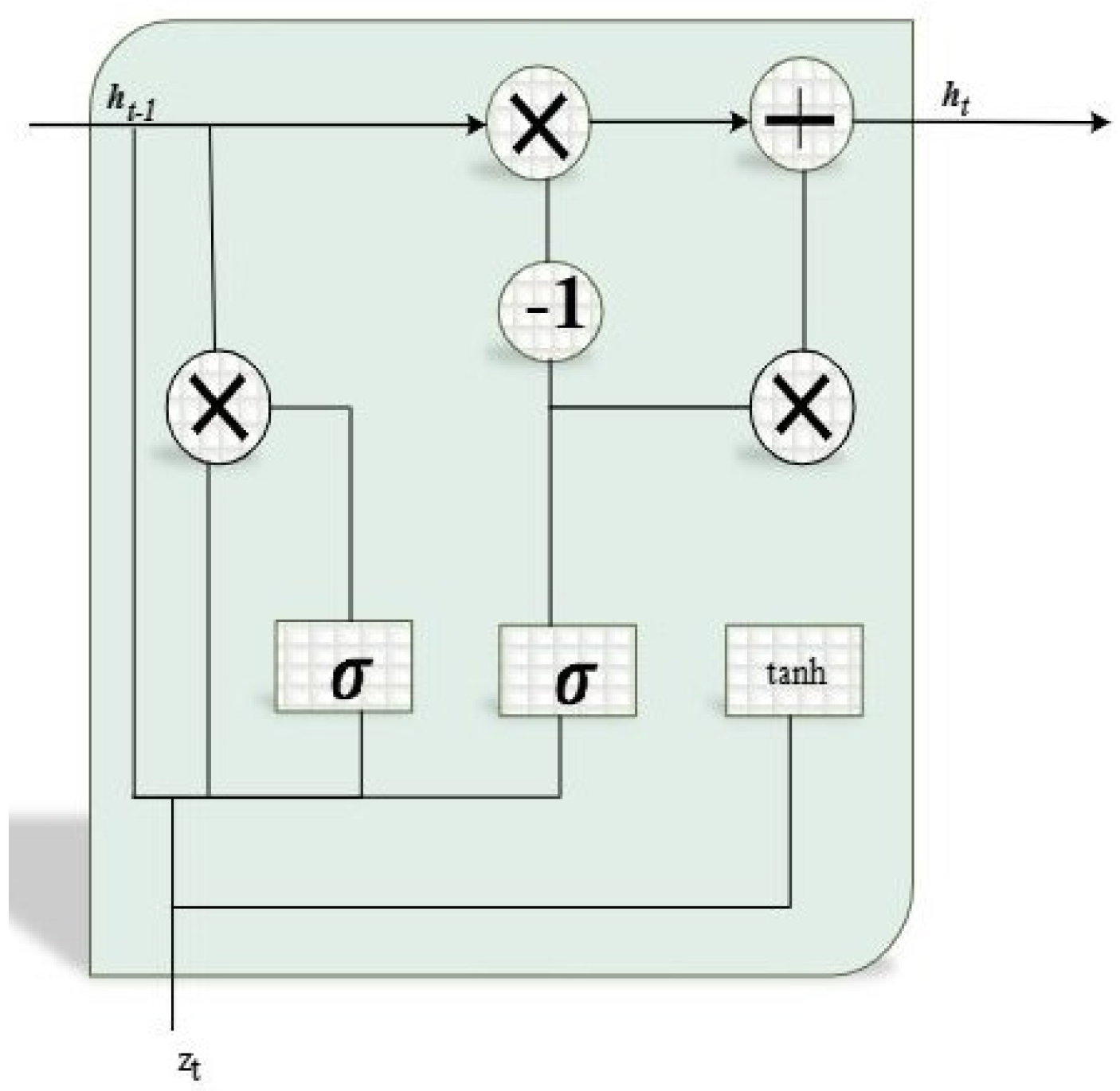
5.1. GRU
5.2. Traffic Information
5.3. Data on the Weather
5.4. Traffic Density
5.5. Traffic Flow
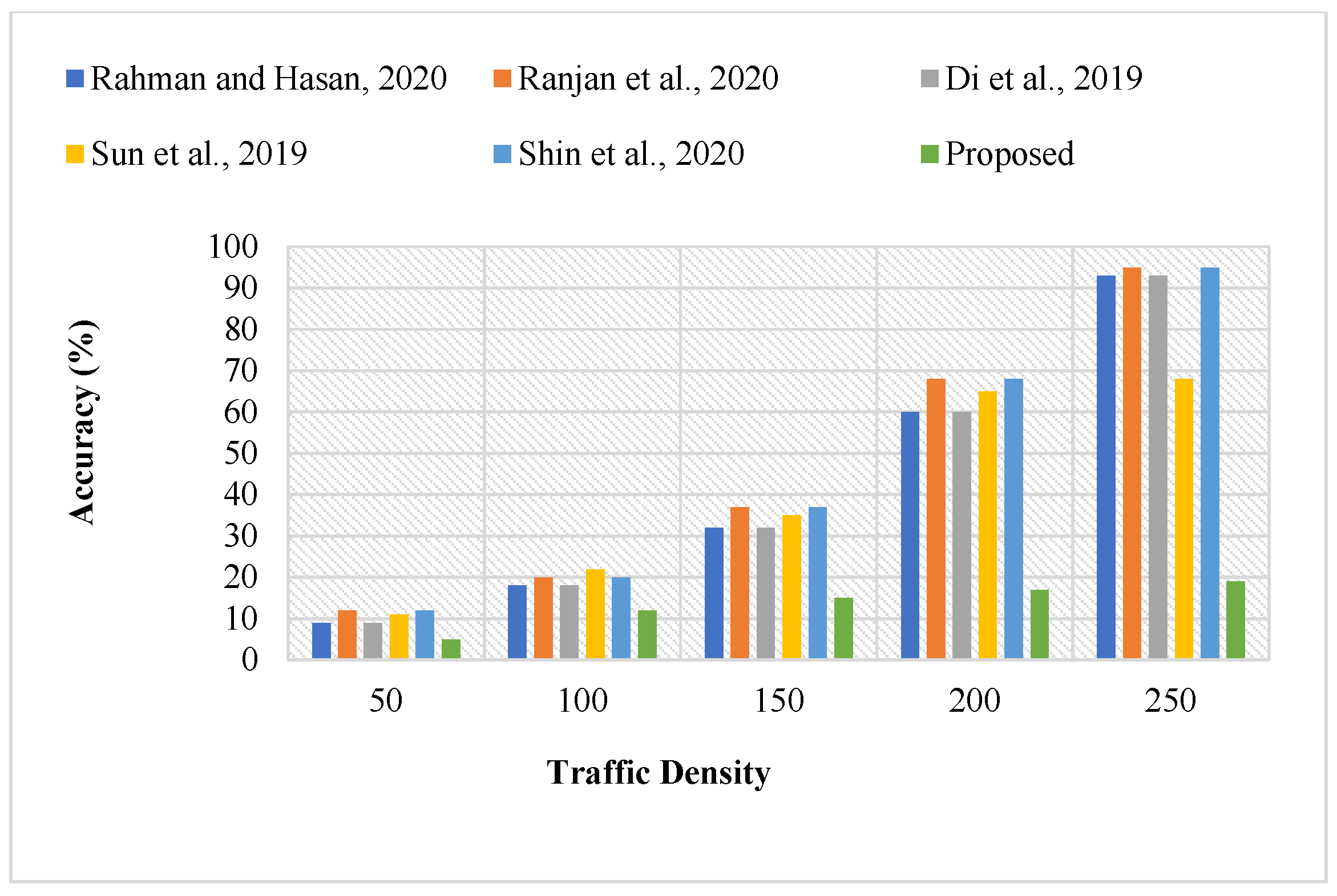
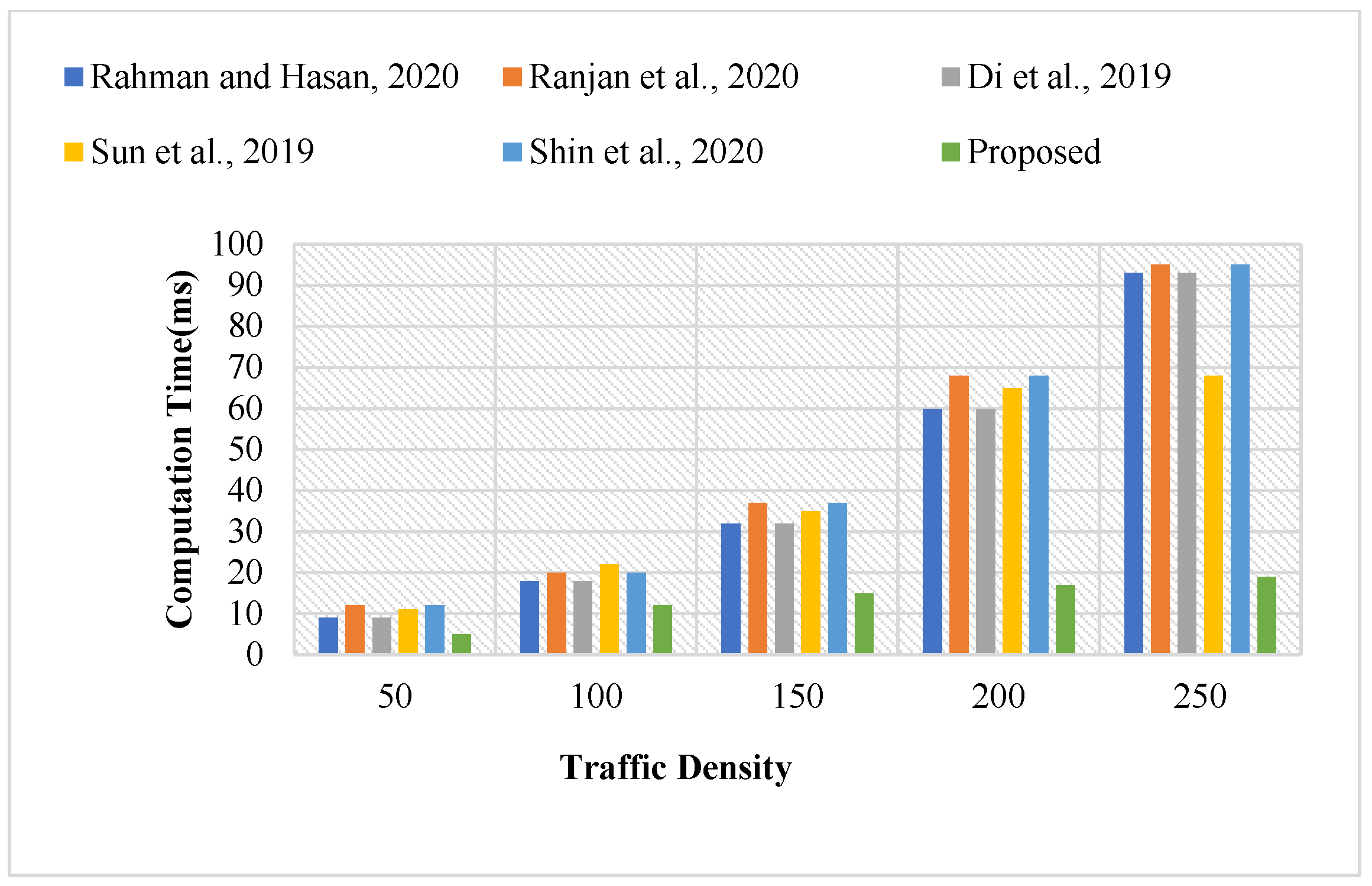
5.6. Experimental Results

| Unique Aspect | Data Source | Performance | DNN Architecture | Congestion Is Defined on the Basis of: | Paper |
|---|---|---|---|---|---|
| Efficient encoding for spatial information | 11 intersections (VLDs) 3 months Florida, USA | RMSE∼1 | LSTM | Queue length | (Rahman and Hasan, 2020) [32] |
| Scalable architecture | Speed heat map Seoul, S Korea | Accuracy: 84.2% | Novel PredNet) (built using CNN&LSTM) | Traffic speed | (Ranjan et al., 2020) [29] |
| Congestion tree | 553 road links (5 weeks) Helsinki, Finland | MSE: 0.73 (weekdays), 0.37 (weekend) | Conv-LSTM | Not applicable (pre-labeled by data provider) | (Di et al., 2019) [33] |
| Detailed sensitivity analysis with regard to the input horizon | 2000 taxis GPS (28 days) Chengdu, China | 90.55% ≤ Accuracy ≤ 96.32% 91.89% ≤ Accuracy ≤ 96.75% | CNN LSTM | Traffic speed | (Sun et al., 2019) [30] |
| Observation: The sort of network affects how complicated a task is. | Seoul, South Korea’s metropolitan suburbs and the surrounding area | MAPE: 4.29% (urban) MAPE: 6.08% (suburban) | LSTM | Traffic speed | (Shin et al., 2020) [31] |
| Parameter | Explanation | Data Type and Values |
|---|---|---|
| No of Neurons | The units within the hidden layer’s techniques for accuracy maximization | Log Uniform or Int [1, 200] |
| Dropout | Minimizing the overfitting of neural nets | Floating [1, 0] |
| Learning Rate | Error-values are adjusted according to the weight values | Log Uniform/Floating [0.1, 0.2, 0.005] |
| Hidden Layers | Input and output layers that maximize the accuracy | Int [0, 2] |
| Batch Size | Describing the no of samples that propagates via the process | Int [1, 512] |
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sunindyo, W.D.; Satria, A.S. Traffic Congestion Prediction Using Multi-Layer Perceptrons And Long Short-Term Memory. In Proceedings of the 2020 10th Electrical Power, Electronics, Communications, Controls and Informatics Seminar (EECCIS), Malang, Indonesia, 26–28 August 2020; pp. 209–212. [Google Scholar]
- Li, L.; Lin, H.; Wan, J.; Ma, Z.; Wang, H. MF-TCPV: A Machine Learning and Fuzzy Comprehensive Evaluation-Based Framework for Traffic Congestion Prediction and Visualization. IEEE Access 2020, 8, 227113–227125. [Google Scholar] [CrossRef]
- Zhang, S.; Yao, Y.; Hu, J.; Zhao, Y.; Li, S.; Hu, J. Deep Autoencoder Neural Networks for Short-Term Traffic Congestion Prediction of Transportation Networks. Sensors 2019, 19, 2229. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Marfia, G.; Roccetti, M.; Amoroso, A. A new traffic congestion prediction model for advanced traveler information and management systems. Wirel. Commun. Mob. Comput. 2013, 13, 266–276. [Google Scholar] [CrossRef]
- Chen, Y.; Lv, Y.; Li, Z.; Wang, F. Long short-term memory model for traffic congestion prediction with online open data. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 132–137. [Google Scholar]
- Liu, Y.; Liu, C.; Zheng, Z. Traffic Congestion and Duration Prediction Model Based on Regression Analysis and Survival Analysis. Open J. Bus. Manag. 2020, 8, 943–959. [Google Scholar] [CrossRef] [Green Version]
- Ran, D.; Jiaxin, H.; Yuzhe, H. Application of a Combined Model based on K-means++ and XGBoost in Traffic Congestion Prediction. In Proceedings of the 2020 5th International Conference on Smart Grid and Electrical Automation (ICSGEA), Zhangjiajie, China, 13–14 June 2020; pp. 413–418. [Google Scholar]
- Xu, X.; Gao, X.; Xu, Z.; Zhao, X.; Pang, W.; Zhou, H. TCPModel: A Short-Term Traffic Congestion Prediction Model Based on Deep Learning. In Proceedings of the Artificial Intelligence: Second CCF International Conference, ICAI 2019, Xuzhou, China, 22–23 August 2019. [Google Scholar]
- Shi, M.; Cai, S.; Yi, Q. Dilated-Dense Network for traffic congestion prediction Model. Acad. J. Comput. Inf. Sci. 2020, 3, 46–58. [Google Scholar]
- Xing, Y.; Ban, X.; Liu, X.; Shen, Q. Large-Scale Traffic Congestion Prediction Based on the Symmetric Extreme Learning Machine Cluster Fast Learning Method. Symmetry 2019, 11, 730. [Google Scholar] [CrossRef] [Green Version]
- Adetiloye, T.O.; Awasthi, A. Multimodal Big Data Fusion for Traffic Congestion Prediction. In Multimodal Analytics for Next-Generation Big Data Technologies and Applications; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Zaki, J.; Ali-Eldin, A.M.; Hussein, S.E.; Saraya, S.; Areed, F.F. Time Aware Hybrid Hidden Markov Models for Traffic Congestion Prediction. Int. J. Electr. Eng. Inform. 2019, 11, 1–7. [Google Scholar]
- Elleuch, W.; Wali, A.; Alimi, A.M. Towards an efficient traffic congestion prediction method based on neural networks and big gps data. IIUM Eng. J. 2019, 20, 108–118. [Google Scholar] [CrossRef]
- Bouyahia, Z.; Haddad, H.; Jabeur, N.; Yasar, A. A two-stage road traffic congestion prediction and resource dispatching toward a self-organizing traffic control system. Pers. Ubiquitous Comput. 2019, 23, 909–920. [Google Scholar] [CrossRef]
- Zhu, Q.; Liu, Y.; Liu, M.; Zhang, S.; Chen, G.; Meng, H. Intelligent planning and research on urban traffic congestion. Future Internet 2021, 13, 284. [Google Scholar] [CrossRef]
- Kothai, G.; Poovammal, E.; Dhiman, G.; Ramana, K.; Sharma, A.; Alzain, M.A.; Gaba, G.S.; Masud, M. A New Hybrid Deep Learning Algorithm for Prediction of Wide Traffic Congestion in Smart Cities. Wirel. Commun. Mob. Comput. 2021, 2021, 5583874. [Google Scholar] [CrossRef]
- Lee, J.; Hong, B.; Lee, K.; Jang, Y. A Prediction Model of Traffic Congestion Using Weather Data. In Proceedings of the 2015 IEEE International Conference on Data Science and Data Intensive Systems, Sydney, NSW, Australia, 11–13 December 2015; pp. 81–88. [Google Scholar]
- Sun, T.; Huang, Z.; Zhu, H.; Huang, Y.; Zheng, P. Congestion Pattern Prediction for a Busy Traffic Zone Based on the Hidden Markov Model. IEEE Access 2021, 9, 2390–2400. [Google Scholar] [CrossRef]
- Guo, J.; Liu, Y.; Yang, Q.; Wang, Y.; Fang, S. GPS-based citywide traffic congestion forecasting using CNN-RNN and C3D hybrid model. Transp. A Transp. Sci. 2020, 17, 190–211. [Google Scholar] [CrossRef]
- Duan, X.; Xu, J.; Chen, Y.; Jiang, R. Analysis of influencing factors on urban traffic congestion and prediction of congestion time based on spatiotemporal big data. In Proceedings of the 2020 International Conference on Big Data, Artificial Intelligence and Internet of Things Engineering (ICBAIE), Fuzhou, China, 12–14 June 2020; pp. 75–78. [Google Scholar]
- Tu, Y.; Lin, S.; Qiao, J.; Liu, B. Deep traffic congestion prediction model based on road segment grouping. Appl. Intell. 2021, 51, 8519–8541. [Google Scholar] [CrossRef]
- Shenghua, H.; Zhihua, N.; Jiaxin, H. Road Traffic Congestion Prediction Based on Random Forest and DBSCAN Combined Model. In Proceedings of the 2020 5th International Conference on Smart Grid and Electrical Automation (ICSGEA), Zhangjiajie, China, 13–14 June 2020; pp. 323–326. [Google Scholar]
- Hilmani, A.; Maizate, A.; Hassouni, L. Automated real-time intelligent traffic control system for smart cities using wireless sensor networks. Wirel. Commun. Mob. Comput. 2020, 2020, 1–28. [Google Scholar] [CrossRef]
- Gollapalli, M.; Atta-ur-Rahman Musleh, D.; Ibrahim, N.M.; Adnan Khan, M.; Abbas, S.; Atta, A.; Aftab Khan, M.; Farooqui, M.; Iqbal, T.; Salih Ahmed, M.; et al. A Neuro-Fuzzy Approach to Road Traffic Congestion Prediction. Comput. Mater. Contin. 2022, 73, 295–310. [Google Scholar] [CrossRef]
- Mainali, S.; Shakya, S. Preprocessing for Road Traffic Congestion Prediction in Nepal Based On GPS Data Using Parallel Computing Strategy. In Proceedings of the 2019 International Conference on Computing, Communication, and Intelligent Systems (ICCCIS), Greater Noida, India, 18–19 October 2019; pp. 220–222. [Google Scholar]
- Liu, Y.; Wu, H. Prediction of Road Traffic Congestion Based on Random Forest. In Proceedings of the 2017 10th International Symposium on Computational Intelligence and Design (ISCID), Hangzhou, China, 9–10 December 2017; Volume 2, pp. 361–364. [Google Scholar]
- Hao, H.; Wang, L.; Xia, Z.; Yu, Z.; Gu, J.; Fu, N. Traffic Congestion Prediction: A Spatial-Temporal Context Embedding and Metric Learning Approach. In Proceedings of the 2021 IEEE 27th International Conference on Parallel and Distributed Systems (ICPADS), Beijing, China, 14–16 December 2021; pp. 498–505. [Google Scholar]
- Pu, S.; Chu, L.; Zhang, Y.; Hou, Z.; Gao, J.; Guo, C. Spatial-temporal Traffic Congestion Prediction Based on Attention Mechanism. In Proceedings of the 2021 5th CAA International Conference on Vehicular Control and Intelligence (CVCI), Tianjin, China, 29–31 October 2021; pp. 1–6. [Google Scholar]
- Zhao, Y.; Zhao, D.; Wu, G. Traffic Flow Prediction Using Bidirectional Recurrent Neural Networks with Residual Connections. IEEE Access 2019, 7, 36105–36115. [Google Scholar] [CrossRef]
- Zhang, L.; Qi, Y.; Zhang, W. Short-Term Traffic Flow Prediction Using Bidirectional Recurrent Neural Network with Multi-Step Attention Mechanism. Math. Probl. Eng. 2020, 2020, 1–13. [Google Scholar] [CrossRef]
- He, X.; Chen, Y.; Dai, G. Traffic flow prediction based on bidirectional recurrent neural network with adaptive activation function. Transp. Res. Part C Emerg. Technol. 2020, 112, 102624. [Google Scholar] [CrossRef]
- Li, H.; Cai, Y.; Zeng, W. Short-term traffic flow prediction based on bidirectional recurrent neural network with wavelet decomposition. J. Adv. Transp. 2020, 2020, 1–15. [Google Scholar] [CrossRef]
- Lu, S.; Zhang, Q.; Chen, G.; Seng, D. A Combined Method for Short-Term Traffic Flow Prediction Based on Recurrent Neural Network. Alex. Eng. J. 2021, 60, 87–94. [Google Scholar] [CrossRef]
- Essien, A.; Chukwkelu, G.; Giannetti, C. A Scalable Deep Convolutional LSTM Neural Network for Large-Scale Urban Traffic Flow Prediction using Recurrence Plots. In Proceedings of the 2019 IEEE AFRICON, Accra, Ghana, 25–27 September 2019; pp. 1–7. [Google Scholar]
- Yi, H.; Bui, K.N. An Automated Hyperparameter Search-Based Deep Learning Model for Highway Traffic Prediction. IEEE Trans. Intell. Transp. Syst. 2021, 22, 5486–5495. [Google Scholar] [CrossRef]
- Gayathri, K.; Gopalakrishnan, B. Prediction of Traffic Congestion through Convolutional Neural Network. In Proceedings of the 2021 Smart Technologies, Communication and Robotics (STCR), Sathyamangalam, India, 9–10 October 2021; pp. 1–5. [Google Scholar]
- Huang, F.; Wang, C.; Chao, C. Traffic Congestion Level Prediction Based on Recurrent Neural Networks. In Proceedings of the 2020 International Conference on Artificial Intelligence in Information and Communication (ICAIIC), Fukuoka, Japan, 19–21 February 2020; pp. 248–252. [Google Scholar]
- Joseph, L.; Goel, P.; Jain, A.; Rajyalakshmi, K.; Gulati, K.; Singh, P. A Novel Hybrid Deep Learning Algorithm for Smart City Traffic Congestion Predictions. In Proceedings of the 2021 6th International Conference on Signal Processing, Computing and Control (ISPCC), Solan, India, 7–9 October 2021; pp. 561–565. [Google Scholar]
- Han, S.; Sun, Q.; Zhao, Q.; Han, R.; Chen, Y. Traffic Forecasting Based on Integration of Adaptive Subgraph Reformulation and Spatio-Temporal Deep Learning Model. Electronics 2022, 11, 861. [Google Scholar] [CrossRef]
- Alssaheli, O.; Zainal Abidin, Z.; Zakaria, N.; Abal Abas, Z. Implementation of Network Traffic Monitoring using Software Defined Networking Ryu Controller. WSEAS Trans. Syst. Control. 2021, 16, 270–277. [Google Scholar] [CrossRef]
- Patil, N.; Agarwal, V. Performance Simulation of a Traffic Sign Recognition based Neural Network on Cadence’s Tensilica Vision P6 DSP using Xtensa Xplorer IDE. WSEAS Trans. Comput. Res. 2022, 10, 35–42. [Google Scholar] [CrossRef]
- Fatimah, S.; Matondang, S.A. Simulation Model to Reduce the Traffic Jams with a Stochastic Program. WSEAS Trans. Environ. Dev. 2022, 18, 37–41. [Google Scholar]
- Xue, X.; Chinnaperumal, S.; Abdulsahib, G.M.; Manyam, R.R.; Marappan, R.; Raju, S.K.; Khalaf, O.I. Design and Analysis of a Deep Learning Ensemble Framework Model for the Detection of COVID-19 and Pneumonia Using Large-Scale CT Scan and X-ray Image Datasets. Bioengineering 2023, 10, 363. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time Class | |
|---|---|
| Congested | Non-Congested |
| True Positive (TP)Congested Predicted as Congested | False Positive (FP) Non-Congested Predicted as Congested |
| False Negative (FN) Congested Predicted as Non- Congested | True Negative (TN) Congested Predicted as Non-Congested |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdullah, S.M.; Periyasamy, M.; Kamaludeen, N.A.; Towfek, S.K.; Marappan, R.; Kidambi Raju, S.; Alharbi, A.H.; Khafaga, D.S. Optimizing Traffic Flow in Smart Cities: Soft GRU-Based Recurrent Neural Networks for Enhanced Congestion Prediction Using Deep Learning. Sustainability 2023, 15, 5949. https://doi.org/10.3390/su15075949
Abdullah SM, Periyasamy M, Kamaludeen NA, Towfek SK, Marappan R, Kidambi Raju S, Alharbi AH, Khafaga DS. Optimizing Traffic Flow in Smart Cities: Soft GRU-Based Recurrent Neural Networks for Enhanced Congestion Prediction Using Deep Learning. Sustainability. 2023; 15(7):5949. https://doi.org/10.3390/su15075949
Chicago/Turabian StyleAbdullah, Sura Mahmood, Muthusamy Periyasamy, Nafees Ahmed Kamaludeen, S. K. Towfek, Raja Marappan, Sekar Kidambi Raju, Amal H. Alharbi, and Doaa Sami Khafaga. 2023. "Optimizing Traffic Flow in Smart Cities: Soft GRU-Based Recurrent Neural Networks for Enhanced Congestion Prediction Using Deep Learning" Sustainability 15, no. 7: 5949. https://doi.org/10.3390/su15075949
APA StyleAbdullah, S. M., Periyasamy, M., Kamaludeen, N. A., Towfek, S. K., Marappan, R., Kidambi Raju, S., Alharbi, A. H., & Khafaga, D. S. (2023). Optimizing Traffic Flow in Smart Cities: Soft GRU-Based Recurrent Neural Networks for Enhanced Congestion Prediction Using Deep Learning. Sustainability, 15(7), 5949. https://doi.org/10.3390/su15075949