
Ecologically Oriented Freeway Control Methods Integrated Speed Limits and Ramp Toll Booths Layout


Abstract
:1. Introduction
2. Traffic Flow Evolution Model
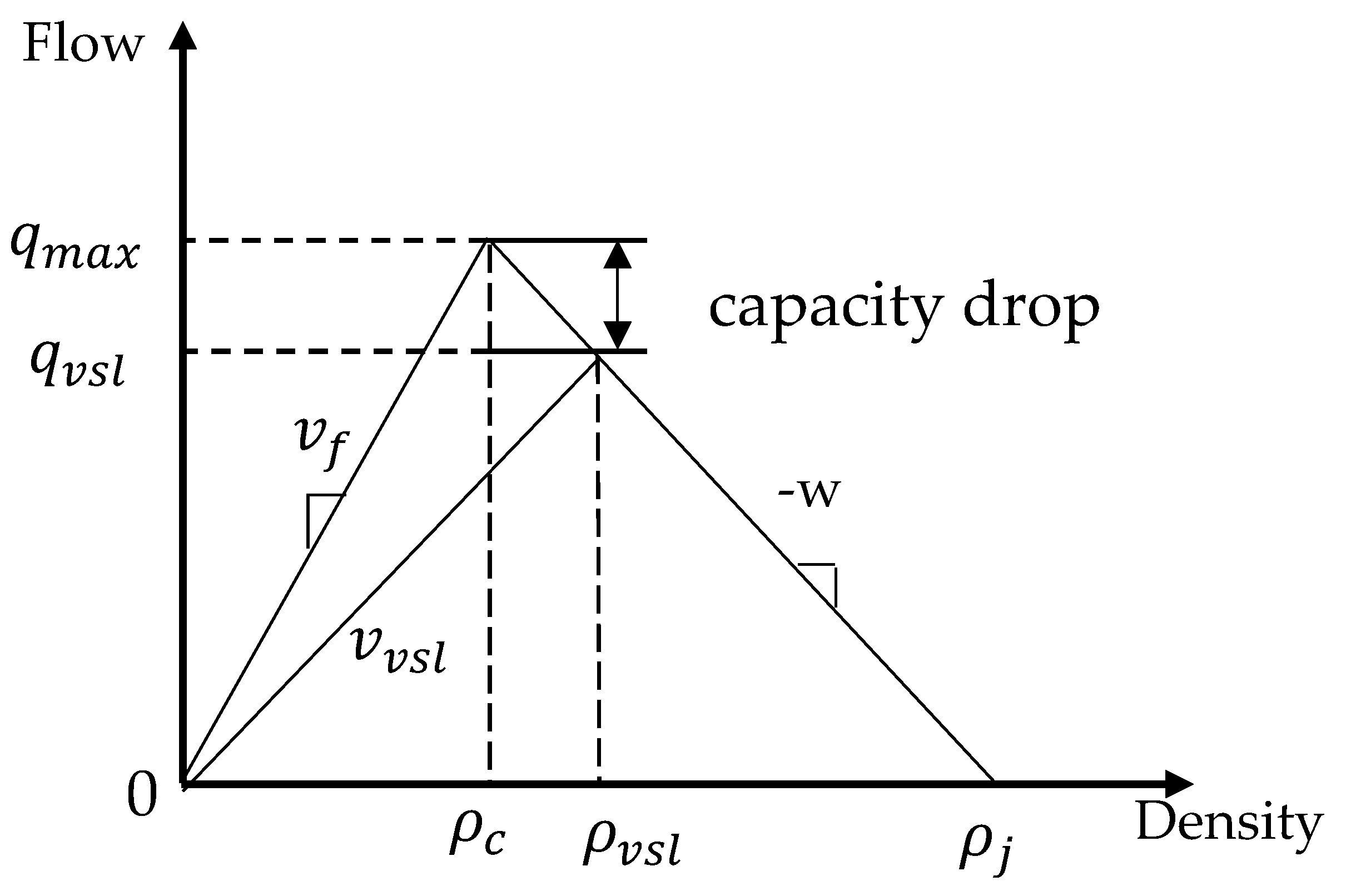
2.1. VSL-Based CTM Model
2.2. CA Model
- (1)
- Accelerate:
- (2)
- Deterministic deceleration:
- (3)
- Random deceleration:
- (4)
- Vehicle motion:
- (5)
- Distance between front and rear vehicles:
2.3. VT-Micro Model
3. Control Strategy
3.1. VSL Control Strategy Design
3.2. Ramp Control Strategy Design
3.3. Collaborative Control Strategy
3.4. Optimization Objective Function
4. Simulation
4.1. Experimental Plan
4.2. Result Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Papageorgiou, M.; Kotsialos, A. Freeway ramp metering: An overview. IEEE Trans. Intell. Transp. Syst. 2002, 3, 271–281. [Google Scholar] [CrossRef]
- Marzoug, R.; Lakouari, N.; Ez-Zahraouy, H.; Téllez, B.C.; Téllez, M.C.; Villalobos, L.C. Modeling and simulation of car accidents at a signalized intersection using cellular automata. Phys. A Stat. Mech. Its Appl. 2022, 589, 126599. [Google Scholar] [CrossRef]
- Qiang, X.H.; Huang, L. Traffic flow modeling in fog with cellular automata model. Mod. Phys. Lett. B 2021, 35, 20150180. [Google Scholar] [CrossRef]
- Hegyi, A.; DeSchutter, B.; Hellendoorn, J. Optimal coordination of variable speed limits to suppress shock waves. IEEE Trans. Intell. Transp. Syst. 2005, 6, 102–112. [Google Scholar] [CrossRef]
- Carlson, R.C.; Papamichail, I.; Papageorgiou, M. Local feedback-based mainstream traffic flow control on motorways using variable speed limits. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1261–1276. [Google Scholar] [CrossRef]
- Fang, X.; Péter, T.; Tettamanti, T. Variable Speed Limit Control for the Motorway–Urban Merging Bottlenecks Using Multi-Agent Reinforcement Learning. Sustainability 2023, 15, 11464. [Google Scholar] [CrossRef]
- Lu, X.Y.; Shladover, S.; Jawad, I.; Jagannathan, R.; Phillips, T. A Novel Speed-Measurement Based Variable Speed Limit/Advisory Algorithm for A Freeway Corridor with Multiple Bottlenecks. In Proceedings of the Transportation Research Board 94nd Annual Conference, Washington, DC, USA, 11–15 January 2015. [Google Scholar]
- Wang, H.; Wang, W.; Chen, X.; Chen, J.; Li, J. Experimental Features and Characteristics of Speed Dispersion in Urban Freeway Traffic. Transp. Res. Rec. J. Transp. Res. Board 2007, 1999, 150–160. [Google Scholar] [CrossRef]
- Spiliopoulou, A.D.; Papamichail, I.; Papageorgiou, M. Toll Plaza Merging Traffic Control for Throughput Maximization. J. Transp. Eng. 2010, 136, 67–76. [Google Scholar] [CrossRef]
- Han, Y.; Hegyi, A.; Zhang, L.; He, Z.; Chung, E.; Liu, P. A New Reinforcement Learning-Based Variable Speed Limit Control Approach to Improve Traffic Efficiency against Freeway Jam Waves. Transp. Res. Part C Emerg. Technol. 2022, 144, 103900. [Google Scholar] [CrossRef]
- Othman, B.; De Nunzio, G.; Di Domenico, D.; Canudas-de-Wit, C. Analysis of the Impact of Variable Speed Limits on Environmental Sustainability and Traffic Performance in Urban Networks. IEEE Trans. Intell. Transp. Syst. 2022, 23, 21766–21776. [Google Scholar] [CrossRef]
- Hadj-Salem, H.; Blosseville, J.M.; Papageorgiou, M. ALINEA: A local feedback control law for on-ramp metering. Transp. Res. Rec. J. Transp. Res. Board 1991, 1320, 58–64. [Google Scholar]
- Papageorgiou, M.; Haj-Salem, H. A Low Cost Tool for Freeway Ramp Metering. In Proceedings of the IFAC Symposium on Low Cost Automation, Buenos Aires, Argentina, 13–15 September 1995; pp. 49–54. [Google Scholar]
- Smaragdis, E.; Papageorgiou, M.; Kosmatopoulos, E. A flow-maximizing adaptive local ramp metering strategy. Transp. Res. Part B Methodol. 2004, 38, 251–270. [Google Scholar] [CrossRef]
- Jacobson, L.N.; Henry, K.C.; Mehyar, O. Real-time metering algorithm for centralized control. Transp. Res. Rec. 1989, 1232, 17–26. [Google Scholar]
- Ci, Y.; Wu, H.; Sun, Y.; Wu, L. A prediction model with wavelet neural network optimized by the chicken swarm optimization for on-ramps metering of the urban expressway. J. Intell. Transp. Syst. 2022, 26, 356–365. [Google Scholar] [CrossRef]
- Chai, G.; Cao, J.; Xu, S. An optimized on-ramp metering method for urban expressway based on reinforcement learning. J. Intell. Fuzzy Syst. 2020, 38, 2703–2715. [Google Scholar] [CrossRef]
- Chen, D.; Ahn, S.; Hegyi, A. Variable speed limit control for steady and oscillatory queues at fixed freeway bottlenecks. Transp. Res. Part B Methodol. 2014, 70, 340–358. [Google Scholar] [CrossRef]
- Chen, D.; Ahn, S. Variable speed limit control for severe non-recurrent freeway bottlenecks. Transp. Res. Part C Emerg. Technol. 2015, 51, 210–230. [Google Scholar] [CrossRef]
- Khondaker, B.; Kattan, L. Variable speed limit: A microscopic analysis in a connected vehicle environment. Transp. Res. Part C Emerg. Technol. 2015, 58, 146–159. [Google Scholar] [CrossRef]
- Shaaban, K.; Khan, M.A.; Kim, I.; Hamila, R. Queue discharge at freeway on-ramps using coordinated operation of a ramp meter and an upstream traffic signal. Procedia Comput. Sci. 2020, 170, 347–353. [Google Scholar] [CrossRef]
- Lu, Y.X.; Qiu, T.Z.; Varaiya, P.; Horowitz, R.; Shladover, S.E. Combining Variable Speed Limits with Ramp Metering for Freeway Traffic Control. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010. [Google Scholar]
- Su, D.; Lu, X.Y.; Varaiya, P.; Horowit, R.Z.; Shladover, S.E. Variable Speed Limit and Ramp Metering Design for Congestion Caused by Weaving. In Proceedings of the Transportation Research Board 90th Annual Meeting, Washington, DC, USA, 22–27 January 2011. [Google Scholar]
- Carlson, R.C.; Papamichail, I.; Papageorgiou, M.; Messmer, A. Optimal Motorway Traffic Flow Control Involving Variable Speed Limits and Ramp Metering. Transp. Sci. 2010, 44, 238–253. [Google Scholar] [CrossRef]
- Ma, M.; Zhang, Y.Z.; Liang, S.D. Dynamic control cycle speed limit strategy for balanced reduction of travel time and emissions. Mod. Phys. Lett. B 2021, 35, 2150153. [Google Scholar] [CrossRef]
- Levinson, D.; Chang, E. A model for optimizing electronic toll collection systems. Transp. Res. Part A Policy Pract. 2003, 37, 293–314. [Google Scholar] [CrossRef]
- Boronico, J.S.; Siegel, P.H. Capacity planning for toll roadways incorporating consumer wait time costs. Transp. Res. Part A Policy Pract. 1998, 32, 297–310. [Google Scholar] [CrossRef]
- Zou, F.; Wang, H.; Tian, J.; Guo, F.; Cai, Q. Analysis on Lane Capacity for Expressway Toll Station Using Toll Data. J. Adv. Transp. 2022, 2022, 9277000. [Google Scholar]
- Liu, L.L.; Weng, J.C.; Rong, J. Simulation based mixed ETC/MTC freeway toll station capacity. In Proceedings of the 19th ITS World Congress, Vienna, Austria, 22–26 October 2012. [Google Scholar]
- Yuan, N.; Ma, M.; Liang, S.; Wang, W.; Zhang, H. Optimal control method of freeway based on tollbooths lane configuration and variable speed limit control. Phys. A Stat. Mech. Its Appl. 2022, 603, 127801. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measurements | Toll Lane | ||
|---|---|---|---|
| Lane 1 | Lane 2 | Lane 3 | |
| Measurement-1 | ETC/MTC | ETC | ETC/MTC |
| Measurement-2 | ETC/MTC | MTC | ETC/MTC |
| Measurement-3 | ETC/MTC | ETC/MTC | ETC |
| Measurement-4 | ETC/MTC | ETC/MTC | ETC |
| Measurement-1 | Measurement-2 | Measurement-3 | Measurement-4 | |||||
|---|---|---|---|---|---|---|---|---|
| Value | - | Value | Improvement (%) | Value | Improvement (%) | Value | Improvement (%) | |
| TTT (veh/h) | 497.05 | - | 487.95 | 1.83 | 452.07 | 9.04 | 374.34 | 24.69 |
| CO (kg/s) | 542.12 | - | 519.03 | 4.26 | 536.36 | 1.06 | 516.14 | 4.79 |
| HC (kg/s) | 27.33 | - | 27.27 | 0.18 | 25.33 | 7.32 | 25.24 | 7.65 |
| NOx (kg/s) | 62.02 | - | 60.57 | 2.34 | 61.99 | 0.05 | 60.48 | 2.48 |
| FC (kg/L) | 17544 | - | 17435 | 0.62 | 17058 | 2.77 | 16667 | 4.98 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, P.; Ma, M.; Wu, C. Ecologically Oriented Freeway Control Methods Integrated Speed Limits and Ramp Toll Booths Layout. Sustainability 2024, 16, 4404. https://doi.org/10.3390/su16114404
Yang P, Ma M, Wu C. Ecologically Oriented Freeway Control Methods Integrated Speed Limits and Ramp Toll Booths Layout. Sustainability. 2024; 16(11):4404. https://doi.org/10.3390/su16114404
Chicago/Turabian StyleYang, Pengsen, Minghui Ma, and Chaoteng Wu. 2024. "Ecologically Oriented Freeway Control Methods Integrated Speed Limits and Ramp Toll Booths Layout" Sustainability 16, no. 11: 4404. https://doi.org/10.3390/su16114404