Abstract
The prediction of expressway vehicle trajectories is a crucial aspect in the development of intelligent expressways. This paper proposes a novel approach, namely the W-GRU-Attention (WGA) model, which utilizes ETC transaction data to predict trajectory selection based on historical traffic paths and previous passed gantry information. In this study, we apply the concept of word embedding models to extract contextual semantics from the historical trajectories on expressways. Additionally, we introduce an average pooling technique for converting the historical vehicle trajectory into a fixed-length Historical Trajectory Vector (HTV), enabling us to capture dependency relationships within experience paths. By combining proximity gantry vectors during transit, we accurately predict the next gantry location. Finally, our proposed method is evaluated using a real-world expressway ETC dataset. It achieves an impressive accuracy rate of 96.14% in capturing the relationship between historical trajectories and adjacent gantries, surpassing other models in path prediction.
1. Introduction
1.1. Background
With the continuous increase in the number of automobiles, expressway congestion has become increasingly severe. However, most of this congestion is concentrated on roads in economically developed areas, resulting in an imbalance in traffic flow distribution. Some roads frequently experience significant and chronic congestion, leading to a large amount of exhaust emissions [1]. How to rationally divert and guide vehicles on expressways, optimize the allocation of traffic flow, improve traffic efficiency, and reduce energy consumption and exhaust emissions is a crucial issue for environmental protection and sustainable development.
The expressway network in China has expanded tremendously, now spanning 177,300 km, making it the largest in the world [2]. Moreover, the ETC system of China now interconnects across 29 provinces, with over 27,000 gantries and 48,000 lanes having undergone upgrades, benefitting over 250 million users [3]. As the world’s largest Internet of Vehicles system, the extensive implementation of ETC has generated a substantial volume of transaction data, providing a robust foundation for intelligent expressway construction.
With the continuous expansion of the expressway network, road traffic monitoring and prediction play a pivotal role in expressway traffic management. Numerous scholars have conducted analyses and predictions on expressway traffic flow [4], travel time [5,6,7], traffic situation estimation [8,9,10,11], abnormal data detection [12], etc. However, these studies primarily focus on macro-level analysis and prediction of expressway operations, while few have addressed micro-level prediction of individual vehicle driving paths. Simultaneously, as Intelligent Transportation Systems (ITS) continue to develop steadily, various demands based on vehicle path prediction are also expanding. On the one hand, it can assist expressway traffic managers in advance vehicle flow forecasting and early identification of congestion to facilitate control measures for subsequent vehicles; on the other hand, most current autonomous vehicles operate under single-vehicle intelligence mode with limited access to information from surrounding sensors only. By predicting vehicle paths beyond line-of-sight perception range through path prediction techniques can enhance safety within autonomous driving systems.
1.1.1. Problem Description
The research paper focuses on vehicles on the expressway and aims to predict the ambiguous gantry paths of these vehicles within the expressway network. This prediction allows for a better understanding of traffic flow direction and facilitates comprehensive traffic flow control across the entire network. This facilitates an equitable distribution of traffic flow, effectively alleviating the phenomena of road congestion, thereby promoting energy efficiency and reducing greenhouse gas emissions associated with transportation.
The expressway network can be represented as an abstract graph, where the unweighted graph G depicts the topology of the network. Each ETC gantry system deployed on the expressway can be considered as a node in this topology. When a vehicle enters the expressway through the entrance toll gate and exits from the exit toll gate, its driving trajectory on the expressway is defined by the sequence of ETC gantries it passes during this period. The objective of this study is to predict, where is the gantry record of the last time vehicle A appeared in the current trip and there is vehicle A’s historical trajectory in the ETC gantry system. The objective of this work is to predict the next path of vehicle A, given the current trajectory of vehicle A and its historical trajectory on the expressway.
1.1.2. Contributions
The existing research on vehicle trajectory prediction primarily relies on GPS data. However, GPS information loss or signal delay can occur on expressways due to factors such as tunnels, mountains, and trees. Additionally, there is a limited number of vehicles equipped with GPS sensors on expressways, and the ownership of GPS positioning data is distributed among multiple enterprises or units. Consequently, it becomes challenging for expressway management units to directly access the GPS positioning information of vehicles, resulting in data barriers. In contrast, ETC transaction data encompasses all vehicles on the expressway and provides a wealth of historical data for analyzing user driving paths. By leveraging ETC transaction data for vehicle path prediction, an understanding of traffic flow can be achieved to support intelligent expressway construction and enhance efficiency in expressway management. Therefore, this paper presents a comprehensive overview of vehicle trajectory prediction methods while considering the unique characteristics of ETC data to realize accurate road-based vehicle path predictions. The main contributions are summarized as follows:
- To the best of our knowledge, this study represents a pioneering effort in expressway ETC path prediction modeling by simultaneously incorporating vehicle historical experience paths and the interdependence of adjacent gantries. This novel approach aims to enhance the algorithm’s performance in path prediction.
- Leveraging ETC transaction data, we introduce a new representation format for historical trajectories that utilizes word vector embedding to capture contextual information between trajectories. Additionally, average pooling is employed to address variations in trajectory lengths, resulting in a fixed-length vector representation known as the historical trajectory vector (HTV).
- In this paper, we propose an innovative model named WGA, which effectively integrates context information between expressway gantries through word-to-vector (W2V) encoding. Furthermore, GRU and Attention mechanisms are utilized to extract features from HTVs and predict subsequent gantries based on previous gantries passages with a remarkable accuracy of 96.14% achieved during experimentation.
The subsequent sections provide a detailed exposition of the conventional vehicle trajectory prediction algorithms. The Section 2 presents our proposed approach, encompassing an overview, data preprocessing, construction of a vehicle portrait library, feature vector construction, and path prediction model. In the Section 3, we present experimental results by comparing our model with existing approaches and conducting result analysis. Finally, in the Section 4, we summarize the contributions of this paper and outline future research directions.
1.2. Related Work
The prediction of vehicle paths holds significant importance in the development and implementation of intelligent transportation systems, which has been extensively studied by scholars both domestically and internationally. Currently, research methods can be broadly categorized as follows.
The research methods for vehicle trajectory prediction can be categorized into three groups based on different research directions: the first group is grounded in physical models, the second group relies on statistical models, and the third group utilizes machine learning models [13].
1.2.1. Vehicle Trajectory Prediction Based on Physical Model
Physically based models utilize the equations of motion from classical mechanics as a foundation for predicting the future trajectory of the target object. Dynamics models encompass both lateral and longitudinal tire forces that contribute to motion, although selecting basic dynamics models typically involves striking a balance between prediction accuracy and computational complexity. In contrast, kinematics models are more commonly employed due to their simplicity, while Kalman filtering (KF) techniques can effectively handle uncertainties or noise arising from the vehicle’s current state. For instance, Ruifeng Zhang et al. [14] proposed an approach integrating vehicle-to-vehicle communication with KF-based methods, enabling the host vehicle to anticipate remote vehicles’ trajectories and avoid potential obstacles. Vasileios Lefkopoulos et al. [15] also introduced the Interactive Multi-Model Kalman Filter (IMM-KF), a novel technique that integrates interactive correlation parameters to enhance trajectory predictions with higher accuracy within seconds using physically-based models. Monte Carlo methods can be employed to generate potential future trajectories by approximately simulating state distributions through random application of physical models on samples of input variables. This approach enables the prediction of traffic participant trajectories based on fully known or unknown states evaluated by the filtering mechanism.
Kazuhide Okamoto et al. [16] employed Monte Carlo methods in their maneuver-based models to forecast future trajectories based on identified maneuvers. Similarly, Yijing Wang et al. [17] utilized Monte Carlo methods for trajectory prediction and subsequently refined reference trajectories using Model Predictive Control (MPC). In summary, physically based models exhibit exceptional interpretability, robust performance, and high accuracy, particularly for short-term prediction tasks. These models are well-suited for security assessment purposes with a focus on predictions within a time range of no more than 1 s. However, they may encounter limitations in capturing complex maneuvers due to reliance on simplified assumptions and limited adaptability in unknown or dynamic environments.
1.2.2. Vehicle Trajectory Prediction Based on Statistical Model
When employing a statistical model for vehicle trajectory prediction, the availability of vehicle trajectory data serves as crucial support, distinguishing it from dynamic model-based prediction. Statistical models for vehicle trajectory prediction typically leverage extensive historical trajectory data to extract movement characteristics and subsequently compare them with the current vehicle trajectory to achieve accurate predictions. Jing Lu et al. [18] proposed a dynamic order Markov method to dynamically determine the optimal order for predicting user locations based on their current trajectory sequence and historical patterns, incorporating trajectory prefix trees and user information from adjacent clusters. Sébastien Gambs et al. [19] examined the mobility behavior of individuals during a specific period and their recently visited locations, constructing a mobile Markov chain (MMC) model for predicting future locations. Sepideh Afkhami Goli et al. [20] presented a vehicle trajectory prediction approach using Gaussian Process Regression (GPR) to forecast future trajectories in real-world scenarios. Experimental results demonstrate that compared to dynamic models, this method significantly enhances prediction accuracy. Leilei Wang et al. [21] proposed a novel vehicle trajectory prediction method, namely Trajectory Prediction based on Vehicular Network (TPVN), which primarily focuses on capturing the regularity of vehicle movement for short-term trajectory prediction. The TPVN method offers the advantage of not only predicting the movement behavior across different modes but also estimating the probability distribution associated with all potential future trajectories of vehicles. Additionally, Quehl Jannik et al. [22] presented a statistical-based approach to vehicle trajectory prediction by actively generating an information map from a statistical perspective. Kaouther Messaoud et al. [23] investigated the problem of vehicle trajectory prediction over an extended horizon, employing an attention mechanism to effectively highlight the significance of neighboring vehicles in determining their future states. In addition to examining paired vehicle interactions, this approach also models higher-order interactions. Furthermore, it leverages a combination of global and local behaviors exhibited by surrounding vehicles to generate diverse potential trajectories. Jiayun Yan et al. [24] proposed a Markov prediction method based on Gaussian analysis that simulates trajectory transition probabilities in continuous time using a Gaussian mixture model, enabling the identification of optimal position transfer nodes for accurate trajectory prediction. The driving route prediction method proposed by Ning Ye et al. [25] is based on the Hidden Markov Model (HMM), enabling accurate anticipation of the complete vehicle journey at the earliest possible stage. Subsequently, a novel algorithm for predicting vehicle trajectories was introduced [26], which utilizes a double-layer hidden state Hidden Markov Model to forecast position information for the nearest neighbor units in the subsequent k stages.
1.2.3. Vehicle Trajectory Prediction Based on Machine Learning Model
With the continuous advancement of information technology and the ever-increasing capabilities of mobile computing, an increasing number of scholars and researchers have turned to machine learning for vehicle trajectory prediction. Chen Li [27] delves deep into driving behavior analysis and employs the GBDT algorithm to investigate vehicle movement patterns under various driving behaviors. Furthermore, a novel driving behavior prediction model that combines CNN and LSTM is proposed. The efficacy of this model is validated through experiments conducted on the NGSIM dataset. Yikai Wu et al. [28] proposed a Transformer-based model for motor vehicle trajectory prediction, which utilizes surrounding vehicles’ position, speed, and acceleration data to forecast the vehicle’s movement trend. The model was evaluated on the NGSIM dataset. Xuewu Ji et al. [29] developed a decoder-encoder model based on an LSTM network integrated with driving intention to predict vehicle trajectory. They employed a mixed-density network to represent all potential future trajectories. Zheng Hu et al. [30] leveraged operator users’ data along with user profiles and behavior features to reconstruct the user’s trajectory sequence, constructing a recurrent neural network for learning sequential characteristics and achieving accurate user position prediction. Yujia Wu et al. [31] utilized mobile phone signaling data to extract stops within base station cells, combined with geographic information, to construct user trajectory sequence data incorporating semantic features. They employed an LSTM neural network to develop a location prediction model. Guiming Sun et al. [32] proposed TCSA-Net, a self-attention network model based on temporal context, to address the location prediction problem. This model harnessed the robust sequence modeling capability of the self-attention mechanism while significantly reducing computational and storage complexity inherent in the self-attention model itself, thereby facilitating its effective application in capturing intricate human movement pattern information. Tong Li et al. [33] utilized real passing records obtained from the traffic bayonet of the urban road network to acquire a dataset of vehicle trajectories. They employed a deep belief network to extract local spatial characteristics, logistic regression for extracting temporal characteristics, and successfully achieved vehicle path prediction. SeongHyeon Park et al. [34] proposed a sequence-to-sequence prediction model for vehicle trajectories based on the LSTM encoder-decoder architecture. Zisheng Zhu [35] optimized the basic LSTM-based vehicle trajectory prediction model using a GA algorithm. The GA algorithm was applied to search and optimize input data globally, thereby accelerating convergence speed and ultimately improving the prediction accuracy of the LSTM network. Based on the aforementioned literature analysis, a majority of path selection prediction research relies on vehicle trajectory data and employs statistical models as well as machine learning models for accurate prediction. However, in the context of expressways, there is a dearth of studies that integrate users’ driving paths with traffic road network data to analyze and model, thereby enhancing the precision of vehicle trajectory prediction.
2. Methodology
2.1. Algorithmic Framework
In this chapter, we will introduce the W-GRU-Attention (WGA) model, and Figure 1 illustrates the specific workflow of the WGA model. The entire workflow is primarily divided into three distinct parts.
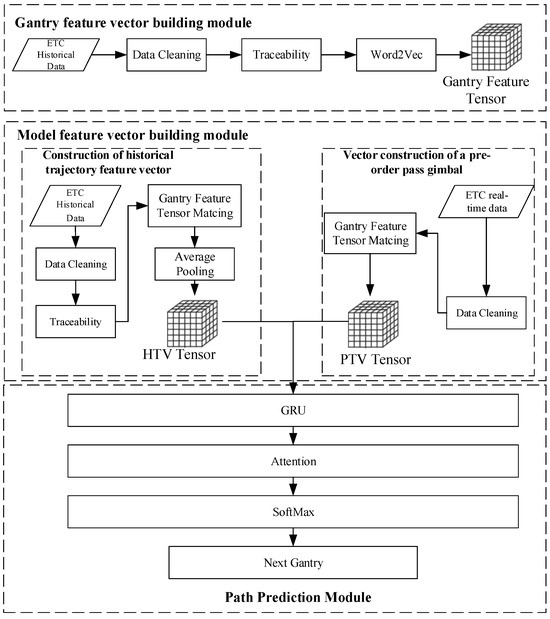
Figure 1.
Overall framework.
- The first part involves the construction of the gantry feature vector module. Firstly, a data cleaning process is conducted to track discrete ETC transaction data based on time and access identification. Subsequently, an expressway gantry topological graph is utilized to establish an expressway gantry-directed graph model. Abnormal transaction data are identified and cleaned according to this directed graph, ensuring data integrity and accuracy. Secondly, the vehicle’s access gantry is tracked using historical ETC transaction data. Finally, a gantry feature vector is constructed for each gantry to determine the access probability between gantries (Section 2.3).
- The second part comprises the module for constructing the model feature vector. Firstly, the construction of historical trajectory feature vectors is performed. After extracting and cleaning ETC historical data, each vehicle’s trajectory is tracked using gantry feature vectors, replacing the gantry name. An algorithm is designed to encode trajectories of varying lengths into fixed-length vectors, referred to as historical traffic trajectory feature vectors (HTV). Secondly, the construction of traffic gantry sequence vectors takes place. To capture the sequential dependence of gantries on a vehicle’s route, the sequence of gantries is represented by gantry feature vectors known as PTVs (Section 2.4).
- The constructed important feature vectors are utilized in the third part to predict the ambiguous path selection of vehicles on the road through GRU-Attention, thereby obtaining the subsequent arrival gantry for vehicles after passing through the expressway gantry.
Definition 1.
(distance-weighted graph of expressway network ): The network comprises a set of ETC gantry nodes and tollgates deployed on bi-directional traffic sections, denoted as . The directed topology between two adjacent nodes () is represented as , where represents the edge set of the expressway network graph . Herein, denotes the actual shortest path distance from node to node .
The edge distance can be obtained through the Amap path planning API. Consequently, each edge in the edge set of the expressway network graph corresponds to a unique margin value that forms the margin set . The margin set D serves as non-negative weights for the directed edges in graph , thereby constituting a distance-weighted representation of the expressway network.
Definition 2.
(transaction data ): Each ETC gantry and toll station on the expressway collectively constitute a node. During the journey on the expressway, vehicles interact with the ETC gantries, generating transaction information. The transaction information of the current vehicle forms a transaction node comprising gantry ID, transaction timestamp, license plate, and vehicle type. Its representation is as follows:
The transaction node of the current vehicle comprises gantry ID , transaction timestamp , license plate , and vehicle type .
Definition 3.
(ETC Trajectory ): The ETC Trajectory refers to the sequence of ETC gantry nodes formed by vehicles traversing the continuous expressway edge < >.
where and are the starting point and end point of the trajectory respectively.
2.2. Data Preprocessing
The data used in this study mainly includes ETC entrance, ETC transaction, CPC transaction, and ETC exit data. The collection of ETC data is facilitated through the deployment of ETC gateways at strategic locations before and after each hub within the expressway network. As the world’s largest Internet of Vehicles system, the ETC gateway system utilizes DSRC technology to establish communication between vehicle-mounted devices (On board unit (OBU) and composite pass card (CPC)) and roadside RSU devices for seamless passage and billing functionalities. The experiment employs ETC transaction data, as outlined in Table 1, which includes fields such as vehicle passage marker, desensitized vehicle ID, transaction time, and gantry ID.

Table 1.
ETC data example.
2.2.1. Trajectory Processing
In order to achieve accurate billing, the ETC toll system on the expressway generates a unique identifier called “passid” for each expressway journey of every vehicle according to specific rules. Before conducting trajectory prediction, it is necessary to extract transaction data and group them according to passid. Subsequently, the data are sorted based on the transaction time of the vehicles, completing the steps of temporal reconstruction. Ultimately, the driving trajectory of vehicles on the expressway can be generated, providing an experimental foundation for subsequent vehicle path prediction. The trajectory generation process is shown in Figure 2.
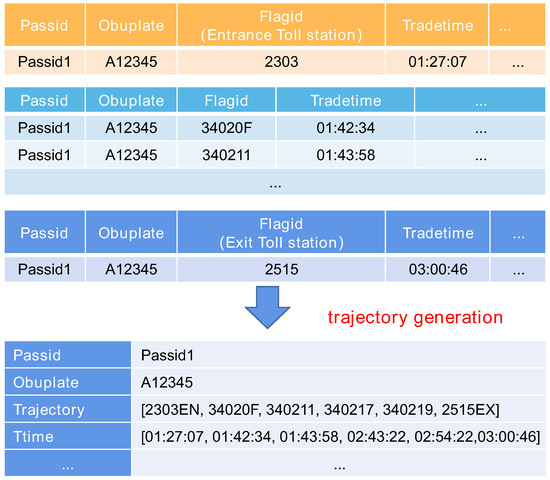
Figure 2.
Trajectory generation process.
2.2.2. Data Cleaning
Due to interference from adjacent roads and following cars, as well as equipment laying positions causing failures, weather conditions leading to wireless crosstalk detection failure, and other factors, the freeway ETC trading system inevitably experiences repeated trading, missing trading, and misleading, anomaly data pattern shown in Figure 3.
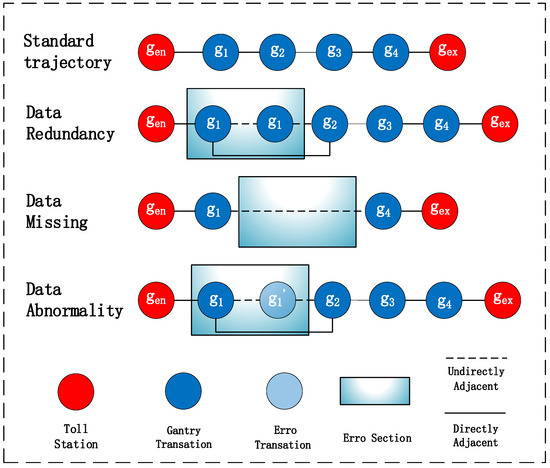
Figure 3.
Anomaly data pattern.
To accurately construct a vehicle portrait library and understand the correct relationship between trajectories to enhance prediction reliability, this study will first preprocess the data by removing abnormal entries.
During model establishment, an overreliance on redundancy data can lead to overfitting and a reduced ability to generalize for new data. Missing data may prevent the model from fully utilizing information, thus decreasing its accuracy. Additionally, incorrect information within the data can result in abnormal or unreasonable values that affect the model’s performance through overfitting or generating errors in such instances. After eliminating invalid entries, each vehicle’s driving trajectory is constructed using the ETC gantry topology set of the freeway network to search for their respective driving paths. The topological relationship between two adjacent ETC gantries in a vehicle’s trajectory is examined by traversing them one by one against the ETC gantry topology set of the freeway network; if a match is found, it is directly added to the missing trajectory position.
- Data redundancy
Data redundancy typically occurs as a result of data being repeatedly uploaded during transmission or copied multiple times during storage. This leads to an expansion in data volume and significant interference with data mining activities. Additionally, the continuous communication between vehicle toll media and Electronic Toll Collection (ETC) antennas, which can be influenced by configuration errors or software anomalies, further contributes to data redundancy. Generally, it is recommended to retain only one instance of the data and directly delete the duplicates.
- 2.
- Data missing
By using the distance-weighted graph of expressway network , the connectivity of trajectories is determined. It is determined whether the preceding and following gantries in the trajectory are directly adjacent to the road network topology, which means . If these gantries are not directly adjacent, it indicates the presence of missing data in that section. The Dijkstra algorithm is adopted to calculate the shortest path and fill in the missing data.
- 3.
- Data abnormality
The encoding of expressway gantries adheres to predetermined standards. Gantries situated in opposing directions are marked numerically; for instance, the counterpart of gantry 340E01 is designated as 350E01. In accordance with this system, is employed to scrutinize the anterior and posterior gantries within a trajectory. If ,where has opposing gantry is denoted as , and If , then shall be employed to substitute for .
In cases where adjacency is not direct, an evaluation must be conducted to ascertain whether the current gantry and its subsequent counterpart maintain direct adjacency. Should they exhibit direct adjacency, the data point is flagged as an inverse anomaly, necessitating data substitution.
2.3. Reconstruction of the Gantry Feature Vector
On the expressway, the gateway is erected before and after each hub, thus the naming of an expressway gateway follows a pattern based on the names of adjacent hubs, such as Quangang to Tiling or Tiling to Yiban. This naming convention can be represented in an A to B mode. Building upon this concept, we can leverage the unique naming rules of expressway gateways to extract vehicle trajectories from extensive ETC historical transaction data. By employing natural language processing techniques to embed word vectors representing these trajectories, we can generate feature vectors for gateways and evaluate their relationship in terms of passage probability. Gantry Characteristic Vector Structure shown in Figure 4.
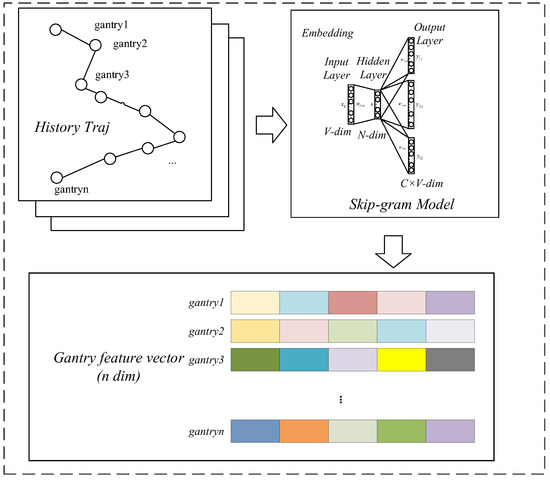
Figure 4.
Gantry Characteristic Vector Structure.
Assuming that the trajectory sequence T is represented as follows: (A to B, B to C, C to D), Table 2 presents the front and rear gantries along with their corresponding names. The objective of this study is to forecast the subsequent gate in the vehicle driving path by utilizing the central gate as a pivotal reference point, as illustrated in Table 2.
Table 2.
Examples of trajectory center gantry and front and rear gantries.
This paper utilizes Word2Vec to map the vocabulary onto a vector space to capture the semantic relationships between trajectories, which are represented by both the continuous skip-gram model (Skip-gram) and the continuous bag-of-words model (CBOW). The Skip-gram model aims to predict surrounding context words given a center word, thereby estimating their probability distribution. By maximizing the likelihood of predicting context words based on a given word, this model trains word vector representations. In contrast, the CBOW model predicts the center word based on its surrounding context words. It leverages vector representations of these contextual words to estimate the possibility of each center word occurrence within a given context. The training objective for CBOW is to maximize the probability of predicting center words under specific contextual conditions. This paper applies these models to predict subsequent words using both center and context words. Specifically, we consider “center gantry” and “front and rear gantry” as contextual concepts within expressway traffic trajectories. Consequently, we employ Skip-gram to construct feature vectors for gantries where “front and rear gantry” defines a sliding window positioned before and after each center gantry, respectively; as such, when moving forward or backward along with its corresponding gantry movement.
The structure of the skip word model is shown in Figure 5. The input is the one-hot vector of the word with a length of , and the corresponding output is , where is the number of context words of the input central word . The input vector is multiplied by the embedding matrix to obtain the embedding vector , which is a vector with a length of . The hidden layer does not need the activation function, and is the length of the word vector determined by the model. The embedding vector is multiplied by the weight matrix to obtain the output vector. Finally, the output of the model is obtained through the calculation of softmax. The ith row of the weight matrix between the input layer and the hidden layer represents the weight of the -th scaffold in the scaffold table. The weight matrix is the target that the model needs to learn. The weight matrix contains the weight information of all the scaffolds in the scaffold table.
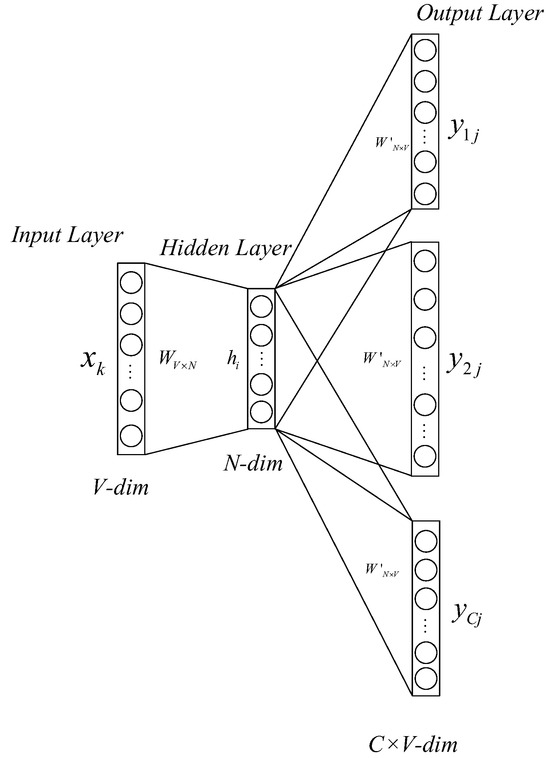
Figure 5.
Skip-gram principle.
The objective of the jump word model is to maximize the probability of accurately predicting the “front and rear gantries” based on the information provided by the “center gantries”. For a given vehicle trajectory sequence , we can define the average logarithmic probability as follows:
where represents the size of the sliding window. The fundamental skipping model defines this probability by employing the softmax function, which is expressed as follows:
The vector representations of “center gantry” and “front and rear gantry” are denoted as and respectively, while represents the total number of gantries. The loss function employed is the cross-entropy loss function, which can be expressed as follows:
The calculation and enumeration of all gantries in the gantry table are required each time the model’s output is computed. Considering as the number of gantries in the gantry table and as the number of gantries in the vehicle trajectory, the time complexity for model training becomes , demanding extensive computation and time.
This method aims to leverage the semantic relationships among gantries in a trajectory sequence by predicting the probability distribution of neighboring gantries given a central gate. This approach enables us to map the vehicle trajectory’s gate sequence onto a vector space, facilitating enhanced comprehension of semantics and associations between gantries.
2.4. Model Feature Vector Building Module
In this section, we will provide a detailed introduction to the feature modeling of expressway gate prediction based on ETC data, encompassing three primary features: historical trajectory features, front gate features, and vehicle information features.
- Historical Trajectory Features (HTV)
With the increasing complexity of expressway network topology, drivers often struggle to fully comprehend the overall network information, leading to a “cognitive blind spot” for unfamiliar but reasonable routes. Consequently, during actual driving scenarios, drivers tend to favor familiar paths rather than strictly adhering to the shortest route. The existence of multiple reasonable paths between origin and destination points in real road networks gives rise to a polysemous path problem. By incorporating historical trajectory features into our model, we can effectively capture path dependency information and significantly enhance its accuracy.
Revised sentence: However, the varying lengths of trajectories pose a challenge in terms of feature input for modeling. Utilizing the Word2vec model, only the gantry can be converted into gantry feature vectors. Therefore, we adopt a CNN embedding method to establish the mapping relationship between the gantry feature vectors and trajectories through average pooling. This enables encoding trajectories of different lengths into fixed-length representations known as HTV (Hierarchical Trajectory Vectorization), as illustrated by the following formula.
The license plate number, denoted as , is accompanied by the trajectory vector features which are embedded using CNN mapping.
- 2.
- Preceding Gantry Feature (PTV)
The preceding gantry feature is generated by the gratings encountered by the vehicle during its journey. The preceding gratings strongly influence the subsequent grating selection; thus, obtaining their features helps the model capture the dependency between adjacent gratings, which is a crucial step. To extract the preceding gratings feature, data cleaning is performed first, and the vehicle’s encountered gratings are matched with the grating feature vector library to obtain features for each preceding grating. This results in an ordered sequence of feature vectors known as. The vehicle features are presented as follows:
where represents the feature vector of the central slat, and denotes the feature vector of the nth front slat.
- 3.
- Vehicle information characteristics
In the process of predicting traffic paths, it is crucial to consider that different vehicle owners and types have distinct destinations and driving habits. Therefore, the inclusion of vehicle type and license plate number information significantly impacts path prediction accuracy. By analyzing historical trajectory data associated with license plate numbers, we can derive experienced paths. For previously untraveled routes in the historical trajectory, we can enhance prediction accuracy by leveraging path selection experiences from similar vehicles based on their respective types. The formulation representing these vehicle characteristics is as follows:
where denotes the vehicle category and represents the license plate number.
The basic notations used in this study are summarized in Table 3.
Table 3.
Basic notations used in this study.
2.5. W-GRU-Attention Based Algorithm for Predicting Polysemous Paths
The proposed path prediction model in this study consists of three main components: Word2vec feature embedding, attention mechanism, and GRU model. As illustrated in Figure 6, the model initially employs the Word2vec approach to capture the relationship between gantries in vehicle trajectories and generate embedded feature representations by learning the connection relationships and contextual features among gate nodes. Subsequently, an attention mechanism is utilized to capture varying weights for gate sequences at different time points, which are then modeled using a GRU network to capture interdependencies among gantries across trajectories. The hidden state can be dynamically adjusted through calculations involving reset gantries and update gantries. Finally, classification results are obtained by employing a fully connected layer combined with the SoftMax function.
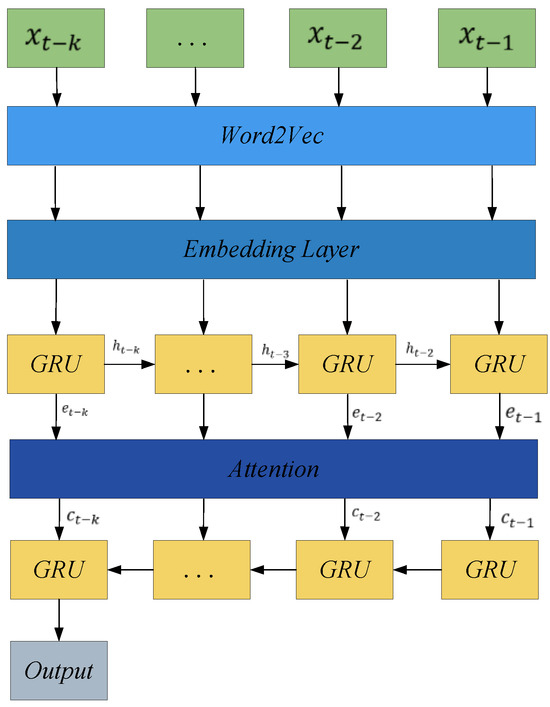
Figure 6.
Prediction algorithm network structure.
2.5.1. Gantry Feature Vector Embedding
The initial layer of the model is the feature embedding layer, which aims to receive the original vehicle trajectory input and convert it into embedding vectors through training the Word2Vec model. In this layer, the original trajectory data is mapped to a high-dimensional embedding space to represent vehicle motion characteristics more effectively. By learning from the Word2Vec model, semantic information between different doors and trajectories can be captured, enabling similar trajectories to be mapped to adjacent embedding spaces. Consequently, this approach enhances the model’s ability to abstract and represent vehicle trajectory data.
2.5.2. Attention Mechanism
The trajectory features of the vehicle are obtained by the second layer of the model after processing through the embedding layer. To capture the information between scaffoldings at different times, we introduce an attention mechanism that can effectively capture the feature representation of each time step. The structure is shown in Figure 7. This mechanism allows for dynamic adjustment of attention degrees across different time points to accurately capture relevant information between scaffold transactions at various time points. Within this attention mechanism, each time step t is represented by three aspects:
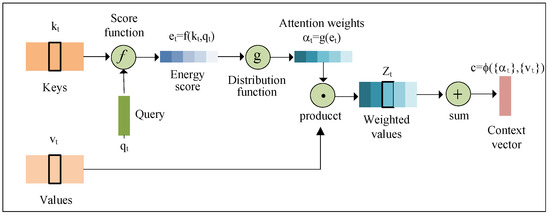
Figure 7.
Attention mechanism schematic diagram.
- The query vector represents the focus or interest information of the current time step and captures its feature representation. serves as a query to calculate similarity with keys from other time steps.
- The key vector represents information from other time steps and is used for similarity calculation with from the current time step; it can be seen as a representation of other time steps for comparison purposes.
- The value vector contains feature representations or information from each time step, which contributes to constructing attention weights; forms a sequence of values used in calculating these weights.
2.5.3. Gated Recurrent Unit
The third layer of the model comprises a gated recurrent unit (GRU) that incorporates information captured by the attention mechanism. To capture temporal dependencies in the vehicle trajectory sequence, the GRU model employs three gated units to obtain vehicle position information at time by utilizing both the hidden unit at time and the vehicle position information at time as inputs. This allows for incorporating historical and current vehicle position information. Once obtained, the GRU model retains historical position information and utilizes it as input at time , enabling effective capturing of temporal dependencies. Additionally, in expressway vehicle trajectories, spatial dependence exists between adjacent gantries. The structure is shown in Figure 8.
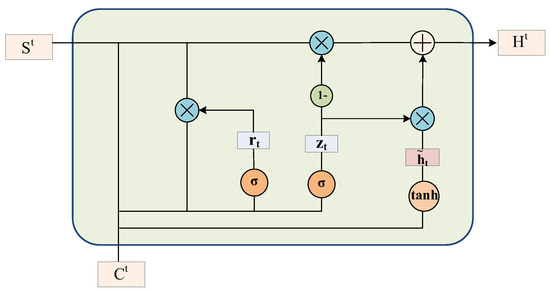
Figure 8.
GRU schematic diagram.
The GRU comprises two gating units: the reset gate (), which can be combined with the tanh function to transform the original information (i.e., the output from the previous position and the input from the current position), yielding a processed outcome of the original information; the update gate () then selects the result processed by , which, added to the weight of the output from the previous position, produces the output for the current position. The specific computational process of the GRU is as follows:
where represents the activation function , denotes he position information of the vehicle at time slice , and represents the state representation of the node’s proximate time window obtained through the contextual attention mechanism. Equation (11) defines as the stored information at the current time, whereas Equation (12) calculates the update gate at the current time as the weighted average of the hidden state of the proximate time window, the stored information at the current time , and ultimately computes the hidden state matrix of the node at timestamp .
3. Experimental Results and Analysis
3.1. Data Source
This experiment selected data collected by the ETC gantry system throughout Fujian province from 1 July to 7 July 2023. The Case Study Area shown in Figure 9. After data preprocessing, we used a total of 50,897,061 data points. After conducting data cleaning and trajectory analysis as described in Section 2.2, we obtained 5,485,957 trajectories.
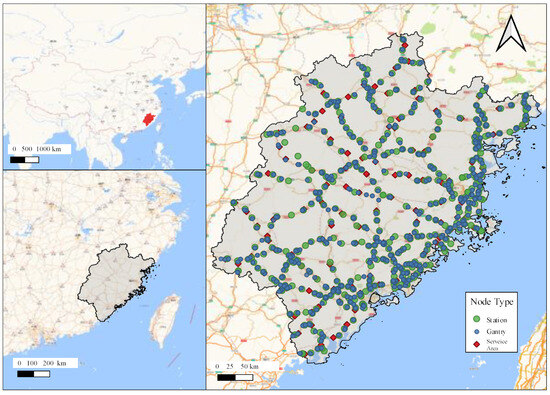
Figure 9.
Case study area.
3.2. Evaluation Indicators
Referring to the commonly used evaluation methods for multi-classification problems, this paper adopts four evaluation indexes to comprehensively evaluate the model effect, which are Accuracy, Precision, Recall, and F1-score.
Accuracy, a widely used metric in classification models, represents the proportion of correctly predicted samples by the model.
Precision: Precision quantifies the ratio of correctly predicted positive examples to all instances classified as positive by the model. A higher precision value signifies the model’s proficiency in accurately identifying positive examples.
Recall, also known as sensitivity or true positive rate, is a metric that quantifies the model’s ability to correctly identify positive samples. It measures the proportion of samples accurately predicted as positive by the model. A high recall value indicates a robust capability of the model to identify positive samples.
F1-score, as the harmonic mean of precision and recall, serves as a comprehensive metric for evaluating the performance of classification models. It takes into consideration both the model’s accuracy in predicting positive samples and its ability to correctly identify all positive samples. A higher F1-score indicates that the model achieves an improved trade-off between precision and recall.
3.3. Parameter Setting
3.3.1. Parameter Configurations for the Word2vec Model
- Embedded dimension
The embedded vector dimension refers to the length of the feature vector obtained during model training, and its selection has a crucial impact on vector expression. Insufficient dimensions may result in incomplete capture of word semantics and information loss, while excessive dimensions can lead to redundancy and dimension disaster. By experimenting with different dimension values, we calculate the average similarity and distance between the resulting vectors, as shown in Figure 10a. Our observations reveal that increasing embedded dimensions expand the distance between vectors while decreasing their similarity. Euclidean distance measures the overall numerical difference across all dimensions, where shorter distances indicate higher similarity between vectors. Cosine similarity measures the cosine value of the angle between two vectors; values closer to 1 signify greater similarity. Based on these findings, this study sets the embedded dimension at 16.
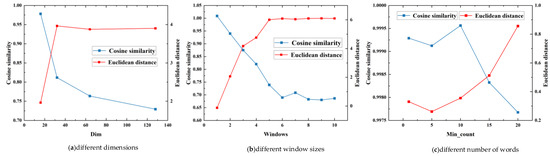
Figure 10.
Variations in vector similarity and distance concerning different parameter settings.
- 2.
- The size of the window
The window size is utilized to delineate the scope of preceding and succeeding frames surrounding a given frame, which are considered during the training process. It determines the extent of contextual information taken into account by the model when provided with a central frame. A smaller window enables capturing more localized information, facilitating the learning of word relationships, whereas a larger window allows for encompassing a broader context, aiding in acquiring long-distance dependencies between words. Figure 10b illustrates variations in vector similarity and distance concerning different window sizes. It can be observed that at a window size of 9, vectors exhibit maximum similarity while maintaining minimal distance. Consequently, we select 9 as the optimal value for the model’s window size parameter.
- 3.
- Minimum frequency of gantry
The minimum frequency of a scaffold serves as a parameter in the Word2Vec model, enabling control over the inclusion of words with minimal occurrence during the training process. Specifically, this parameter determines whether a scaffold is included in the scaffold table based on its frequency within the entire scaffold library. Only when the number of scaffolds exceeds or equals this minimum frequency threshold will they be considered for inclusion. By employing a lower frequency threshold, less frequently occurring scaffolds can be filtered out from the library, thereby enhancing training efficiency. As depicted in Figure 10c, setting a minimum scaffold frequency of 5 results in higher vector similarity and smaller Euclidean distances, thus justifying its selection.
After conducting numerous experiments, various values of the aforementioned parameters were tested, and their average values were computed to minimize the error. Based on the preceding experiments, we determined the optimal parameter selection for our model, and these specific parameter values are presented in Table 4.
Table 4.
Word2vec model parameter settings.
3.3.2. GRU-Attention
In the comparative experiments of different prediction models, the selection of network parameters plays a crucial role in determining algorithm performance. In our study, we meticulously determined the parameters for each experiment based on an extensive literature review and empirical trial and error, considering the specific context of this study. Table 5 presents the network parameter settings employed in this methodology.
Table 5.
GRU-ATTENTION model parameter setting table.
3.4. Performance Analysis of Different Variables
The prediction of vehicle trajectory is closely associated with the user’s historical path information, temporal characteristics of the front-order pass gateway node, spatial correlation, and vehicle type, among other factors. These variables significantly impact the accuracy of predictions; therefore, it is crucial to experiment with each parameter and determine the optimal threshold. To model and analyze different characteristic variables’ effects on performance using the proposed W-GRU-Attention model, we identified the best variables for our model.
3.4.1. Number of Gantries for Early Access
The sequence of gantries refers to the gate data passed by the current vehicle during a trip, which reflects both the temporal relationship and spatial correlation of the vehicle. The contextual relationship represented by this sequence can capture interdependencies between gate nodes. Previous studies have shown a clear dependence between gantries. We investigate how different numbers of gantries in the sequence affect the prediction performance of our model. On average, there are 5 km between consecutive gantries on expressways. However, due to variations in driving distances and trajectories, the number of gantries in each trajectory can differ significantly. Consequently, as driving distance increases, fewer samples are available for training and prediction purposes due to an inverse proportionality concerning gate count in each sequence. Figure 11 demonstrates that using more than three gantries yields better prediction results. There are 5,485,957 trajectories with more than three gantries included in our dataset analysis where Accuracy reaches 0.8329, Precision reaches 0.7465, Recall reaches 0.7765, and F1 Score reaches 0.7527 simultaneously. Although including more than four gantries improves each prediction index mentioned above, only a total of 4,444,114 samples would be available for subsequent training when considering both sample availability and model effectiveness comprehensively. Therefore, we set three as the parameter value for front order gantry based on careful consideration: By considering information characteristics from the first three gantry nodes within a vehicle’s driving path, key features and context information can be provided to improve the accuracy and robustness of predictions.
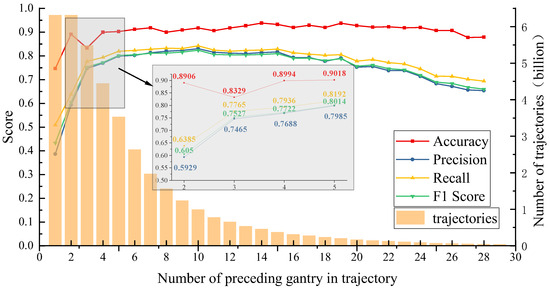
Figure 11.
Prediction effect analysis of the number of front gantries.
3.4.2. Number of Historical Trajectories
The number of historical trajectories encompasses the extensive traffic behavior exhibited by vehicles, thereby reflecting the diversity and trends in their driving patterns. By analyzing these historical trajectories, we can gain a deep understanding of vehicle behavior across different periods and locations, revealing common travel routes and destinations. The diverse nature of historical trajectory data not only provides a detailed depiction of driving habits but also offers comprehensive and multidimensional input information for models, thus enhancing our ability to comprehend and predict vehicle behavior.
To investigate the impact of different historical trajectories on the model in this study, vehicle data with diverse historical trajectories were partitioned and inputted into the model for prediction, as illustrated in Figure 12. As depicted in the figure, incorporating the vehicle’s historical trajectory significantly enhances the predictive performance of the model, surpassing 0.8 across all evaluation metrics. Moreover, it is observed that the prediction accuracy improves with an increasing number of historical trajectories. However, when the number of historical trajectories exceeds 20, a decline in sample size starts to affect the generalization ability of the model, leading to fluctuations in its predictive performance. Notably, when considering more than six historical trajectories (978,777 trajectories), both Accuracy and Precision reach 0.947 and 0.9172, respectively, while Recall and F1 Scores achieve values of 0.9063 and 0.905, respectively. Taking into account both model effectiveness and available sample size comprehensively, this paper selects vehicles with more than six historical trajectories as presequence parameters for further analysis.
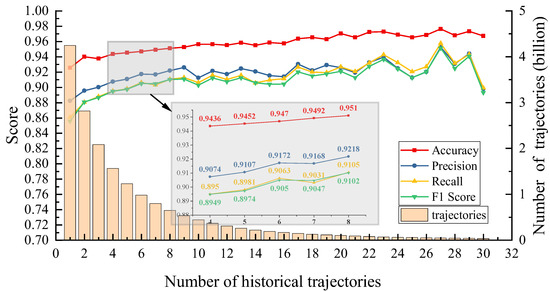
Figure 12.
Prediction effect of historical trajectory number.
According to the aforementioned analysis, a correlation has been identified between vehicle path prediction and the number of historical trajectories, as well as the quantity of sequence gantries. In the subsequent experimental phase, data comprising more than six historical trajectories will be modeled and analyzed, with a sample size of 978,777. The number of sequence gantries will be set at 3 while considering a sliding window size of 5 in conjunction with Skip-gram characteristics. The third central gateway, along with the first two gateways, is utilized to predict the subsequent gateway that the vehicle is expected to enter.
3.5. Model Performance Analysis
3.5.1. Datasets
Based on previous research on model parameter design, input characteristics, and model selection, among other aspects, a total of 978,777 trajectories from 2,067,626 vehicles with more than six historical trajectories were utilized for empirical investigation. To ensure the model’s generalization capability and prevent overfitting, we split the dataset into training, testing, and validation sets. We used the training set for model training, followed by testing the model with the testing set. Finally, we validated the model’s performance on the validation set. The data set partitioning is shown in Table 6, which is randomly divided into training, testing, and validation sets with a ratio of 70%,15%, and 15%.
Table 6.
Experimental dataset split.
3.5.2. Baseline Model
In the dataset, we assume that each sample is independently and identically distributed, implying that all samples are drawn from the same probability distribution and are mutually independent. Based on this assumption, we employ a range of well-established classifiers known for their efficacy in processing multivariate feature data to evaluate their performance in handling ETC data, which comprises complex high-dimensional features. In addition to our proposed GRU-Attention algorithm, we also conduct experiments with various mature machine learning and deep learning methods, including DT, RF, Bi-RNN, LSTM, and other algorithms. Furthermore, we predict the next-gantry selection (Probability) of vehicles based on historical traffic path probabilities derived from the expressway network topology. By comparing these approaches with our proposed algorithm, we aim to establish a comprehensive benchmark for performance comparison.
Models for performance comparison:
- Probability: Statistical analysis is performed on the flow distribution of each subsequent gateway on the expressway to generate a probability distribution for the next gateway. Vehicle trajectory prediction is solely conducted based on probabilistic methods.
- Decision Tree (DT): A tree-shaped model used for classification and regression, which is easy to interpret and highly applicable to structured data but tends to overfit.
- Random Forest (RF): An ensemble learning method composed of multiple decision trees that perform predictions through voting or averaging, exhibiting excellent performance in handling structured data, particularly when there are nonlinear relationships between features.
- LSTM (Long Short-Term Memory): A type of recurrent neural network that can learn and remember over long sequences and is capable of learning non-linear relationships between features. It has been widely used in traffic prediction, time series analysis, and other tasks where sequence data are important.
- Bi-RNN (Bidirectional Recurrent Neural Network): An extension of RNN that processes input sequences in both forward and backward directions. This allows the model to capture information from both past and future contexts, and Bi-RNN has been shown to perform better than standard RNNs on certain tasks due to its ability to capture more complex patterns in the data.
3.5.3. Result Analysis
The obtained results are presented in Table 7, and shown in Figure 13. The proposed method in this study exhibits significant advantages in path prediction compared to other algorithms included in the comparison across various indicators. Notably, the F1 score achieved is 0.9545 which represents the harmonic mean of Precision and Recall; thus, effectively balancing false positive minimization and true positive maximization. Additionally, recall of 0.9532 and precision of 0.9614 demonstrate that the constructed model possesses high quality and strong generalizability.
Table 7.
Performance comparison of different models.
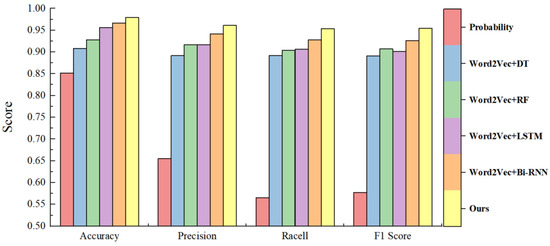
Figure 13.
Performance comparison of different models.
To assess the impact of different vehicle trajectory lengths on path prediction, we employed the proposed W-GRU-Attention model for modeling and prediction, as illustrated in Figure 14. As depicted in the figure, the model demonstrates favorable predictive performance when forecasting vehicle data that has traversed between 3 and 20 gantries. However, beyond 20 gantries, an unstable trend emerges due to limited trajectory data and insufficient historical trajectory features. Despite this instability, the accuracy remains at approximately 90%. Notably, a majority of expressway vehicle trajectories consist of less than ten gantries (as shown in Figure 15), with trajectories spanning more than 15 gantries accounting for only 6.83% of total trips. Consequently, the scarcity of data leads to fluctuations in model prediction effectiveness; however, increasing the number of data samples can enhance predictive performance.
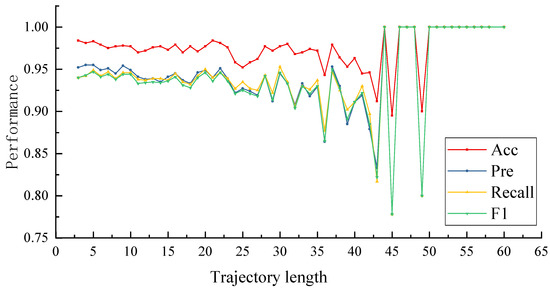
Figure 14.
Prediction effect of different trajectory lengths.
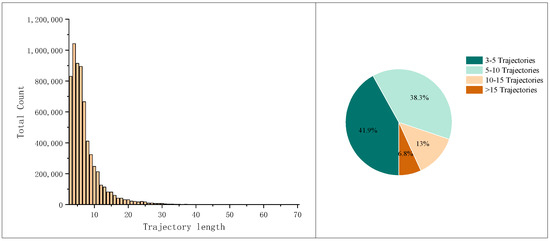
Figure 15.
Trajectory length analysis.
4. Conclusions
The present study introduces a novel model for predicting ETC paths on expressways. In contrast to traditional algorithms, this study uses ETC data, maximizes the utilization of expressway characteristics, and successfully achieves individual vehicle trajectory prediction.
This approach utilizes word vector embedding to transform the vehicle’s historical path, which is originally represented as a variable length sequence with adjacent gantries, into a fixed length vector. By leveraging the features of the preceding gantry vector, it predicts the next arrival gantry accurately. Notably, this method effectively captures the intricate relationship between the vehicle’s historical experience path and its neighboring gantries.
- Based on the naming characteristics of the gateway, we analyze and process the historical traffic trajectory information using Word2vec cardinality to obtain the feature vector for each gateway and determine the traffic probability between gantries.
- The Historical Trajectory Vector (HTV) captures historical experience information, while the Preceding Traffic Gateway Vector (PTV) of vehicles in transit provides adjacent dependency information.
- By combining the GRU model with Word2vec-generated feature vectors and an Attention mechanism, our designed WGA model achieves an accuracy of 97.96%.
- This novel approach offers significant advantages for predicting downstream gantries for vehicles in transit based on their historical trajectories.
The scheme exhibits significant potential in accurately predicting the selection of polysemous routes on expressways, thereby providing crucial support for the refined management and intelligent construction of expressways. Based on the research findings presented in this paper, we will focus our future investigations on three key research directions. Firstly, the method’s effectiveness heavily depends on the availability of vehicle historical trajectories. However, other parameters, such as weather and road conditions, may also exist that influence the vehicle trajectory; consequently, we aim to extract additional features to enhance prediction accuracy when faced with limited historical trajectory information. Secondly, due to the relatively coarse deployment granularity of ETC gantries and their limited ability to accurately determine vehicle positions, achieving precise prediction of vehicle locations on expressways remains a challenge. To overcome this limitation, it is recommended that future studies combine other sensors and data sources to reconstruct road network conditions and further improve the level of refined management and control over expressways. Lastly, our model exhibits considerable complexity; thus, optimizing its structure and enhancing computational efficiency remain ongoing challenges.
Author Contributions
Conceptualization, S.L., H.X. and F.Z.; methodology, S.L., Y.L. and Z.H.; software, S.L., Y.L. and Z.H.; validation, H.Z., Z.H. and S.L.; formal analysis, S.L. and H.Z.; investigation, S.L., H.Z. and Y.L.; resources, S.L.; data curation, S.L.; writing—original draft preparation, S.L. and Y.L.; writing—review and editing, H.X. and F.Z.; visualization, Z.H.; supervision, H.X. and F.Z.; project administration, S.L. and Y.L.; funding acquisition, F.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research is partially supported by the Renewable Energy Technology Research institution of Fujian University of Technology Ningde, China (Funding number: KY310338, Funder: Fumin Zou), the 2020 Fujian Province “Belt and Road” Technology Innovation Platform (Funding number:2020D002, Funder: Fumin Zou), the Provincial Candidates for the Hundred, Thousand and Ten Thousand Talent of Fujian (Funding number: GY-Z19113, Funder: Fumin Zou), the Patent Grant project (Funding number: GY-Z18081, GY-Z19099, GY-Z20074, Funder: Fumin Zou), Horizontal projects (Funding number: GY-H-20077, Funder: Fumin Zou), Municipal level science and technology projects (Funding number: GY-Z-22006, GY-Z-220230, Funder: Fumin Zou), Fujian Provincial Department of Science and Technology Foreign Cooperation Project (Funding num-ber: 2023I0024, Funder: Fumin Zou), the Open Fund project (Funding number: KF-X19002, KF-19-22001, Funder: Fumin Zou).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The ETC transaction data utilized in this study were obtained from Fujian Expressway Information Technology Co., Ltd. (Fuzhou, China). Restrictions apply to the availability of these data, which were used under license for this study and are not publicly available. Data are available from the authors with the permission of Fujian Expressway Information Technology Co., Ltd. All data processing and analyses were conducted in compliance with relevant data protection and privacy laws. No individual or personal data were used in this study.
Conflicts of Interest
Author Yongyu Luo was employed by the company Fujian Provincial Expressway Information Technology Co., Ltd. The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
References
- Sihag, G.; Parida, M.; Kumar, P. Travel time prediction for traveler information system in heterogeneous disordered traffic con-ditions using GPS trajectories. Sustainability 2022, 14, 10070. [Google Scholar] [CrossRef]
- Ministry of Transport of the People’s Republic of China. 2022 Statistical Bulletin on the Development of the Transportation Industry; Ministry of Transport of the People’s Republic of China: Beijing, China, 2022.
- Qian, C.; Li, S.; Wang, Y. Rationalized Lanes Configuration for Expressway Gantry Plaza. J. Transp. Syst. Eng. Inf. Technol. 2021, 21, 231–237. [Google Scholar]
- Sun, L.; Cheng, Z.; Kong, D.; Xu, Y.; Wen, S.; Zhang, K. Modeling and analysis of human-machine mixed traffic flow considering the influence of the trust level toward autonomous vehicles. Simul. Model. Pract. Theory 2023, 125, 102741. [Google Scholar] [CrossRef]
- Chiou, J.-M.; Liou, H.-T.; Chen, W.-H. Modeling time-varying variability and reliability of freeway travel time using functional principal component analysis. IEEE Trans. Intell. Transp. Syst. 2019, 22, 257–266. [Google Scholar] [CrossRef]
- Chen, L.; Chen, D. Exploring spatiotemporal mobilities of highway traffic flows for precise travel time estimation and prediction based on electronic toll collection data. Veh. Commun. 2021, 30, 100356. [Google Scholar] [CrossRef]
- Luo, S.; Zou, F.; Zhang, C.; Tian, J.; Guo, F.; Liao, L. Multi-view travel time prediction based on electronic toll collection data. Entropy 2022, 24, 1050. [Google Scholar] [CrossRef]
- Yao, E.; Wang, X.; Yang, Y.; Pan, L.; Song, Y. Traffic flow estimation based on toll ticket data considering multitype vehicle impact. J. Transp. Eng. Part A Syst. 2021, 147, 04020158. [Google Scholar] [CrossRef]
- Wu, L.; Shou, G.; Xie, Z.; Jing, P. Mobile Phone Data Feature Denoising for Expressway Traffic State Estimation. Sustainability 2023, 15, 5811. [Google Scholar] [CrossRef]
- Ma, J.; Zeng, Y.; Chen, D. Ramp Spacing Evaluation of Expressway Based on Entropy-Weighted TOPSIS Estimation Method. Systems 2023, 11, 139. [Google Scholar] [CrossRef]
- Makridis, M.A.; Kouvelas, A. An adaptive framework for real-time freeway traffic estimation in the presence of CAVs. Transp. Res. Part C Emerg. Technol. 2023, 149, 104066. [Google Scholar] [CrossRef]
- Guo, F.; Zou, F.; Luo, S.; Liao, L.; Wu, J.; Yu, X.; Zhang, C. The fast detection of abnormal ETC data based on an improved DTW algorithm. Electronics 2022, 11, 1981. [Google Scholar] [CrossRef]
- Bharilya, V.; Kumar, N. Machine learning for autonomous vehicle’s trajectory prediction: A comprehensive survey, challenges, and future research directions. Veh. Commun. 2024, 46, 100733. [Google Scholar] [CrossRef]
- Zhang, R.; Cao, L.; Bao, S.; Tan, J. A method for connected vehicle trajectory prediction and collision warning algorithm based on V2V communication. Int. J. Crashworthiness 2017, 22, 15–25. [Google Scholar] [CrossRef]
- Lefkopoulos, V.; Menner, M.; Domahidi, A.; Zeilinger, M.N. Interaction-aware motion prediction for autonomous driving: A multiple model kalman filtering scheme. IEEE Robot. Autom. Lett. 2020, 6, 80–87. [Google Scholar] [CrossRef]
- Okamoto, K.; Berntorp, K.; Di Cairano, S. Driver intention-based vehicle threat assessment using random forests and particle filtering. IFAC-Pap. 2017, 50, 13860–13865. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Z.; Zuo, Z.; Li, Z.; Wang, L.; Luo, X. Trajectory planning and safety assessment of autonomous vehicles based on motion prediction and model predictive control. IEEE Trans. Veh. Technol. 2019, 68, 8546–8556. [Google Scholar] [CrossRef]
- Lu, J.; An, J.; Liu, C. DMM+C: A Location Prediction Method Fusing Multi-source Data. Small Microcomput. Syst. 2022, 43, 2278–2284. [Google Scholar]
- Gambs, S.; Killijian, M.-O.; del Prado Cortez, M.N. Next place prediction using mobility markov chains. In Proceedings of the First Workshop on Measurement, Privacy, and Mobility, Bern, Switzerland, 10 April 2012; Association for Computing Machinery: New York, NY, USA, 2012; pp. 1–6. [Google Scholar]
- Goli, S.A.; Far, B.H.; Fapojuwo, A.O. Vehicle Trajectory Prediction with Gaussian Process Regression in Connected Vehicle Environment. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 550–555. [Google Scholar]
- Wang, L.-l.; Chen, Z.-g.; Wu, J. Vehicle trajectory prediction algorithm in vehicular network. Wirel. Netw. 2019, 25, 2143–2156. [Google Scholar] [CrossRef]
- Quehl, J.; Hu, H.; Wirges, S.; Lauer, M. An approach to vehicle trajectory prediction using automatically generated traffic maps. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 544–549. [Google Scholar]
- Messaoud, K.; Yahiaoui, I.; Verroust-Blondet, A.; Nashashibi, F. Attention based vehicle trajectory prediction. IEEE Trans. Intell. Veh. 2020, 6, 175–185. [Google Scholar] [CrossRef]
- Yan, J.; Chen, C.; Zhang, D. Node selection method based on Markov location prediction in vehicle networking. In Proceedings of the 2018 IEEE 4th Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 14–16 December 2018; pp. 754–758. [Google Scholar]
- Ye, N.; Wang, Z.-Q.; Malekian, R.; Lin, Q.; Wang, R.-C. A method for driving route predictions based on hidden Markov model. Math. Probl. Eng. 2015, 2015, 824532. [Google Scholar] [CrossRef]
- Ye, N.; Zhang, Y.; Wang, R.; Malekian, R. Vehicle trajectory prediction based on Hidden Markov Model. KSII Trans. Internet Inf. Syst. 2016, 10, 3150–3170. [Google Scholar] [CrossRef][Green Version]
- Li, C. Vehicle Driving Behavior Prediction Based on Combination Neural Network. Master’s Thesis, Beijing Jiaotong University, Beijing, China, 2021. [Google Scholar]
- Wu, Y.; Hu, Q.; Wu, X. Vehicle Trajectory Prediction Model under the Background of Internet of Vehicles. J. Southeast Univ. (Nat. Sci. Ed.) 2022, 52, 1199–1208. [Google Scholar]
- Ji, X.; Fei, C.; He, X.; Liu, Y.; Liu, Y. Driving Intention Recognition and Vehicle Trajectory Prediction Based on LSTM Network. China J. Highw. Transp. 2019, 32, 34–42. [Google Scholar]
- Hu, Z.; Liu, Y.; Zhu, X.; Yu, J. Location Prediction Model Based on User Behavior Sequence Features. J. Beijing Univ. Posts Telecommun. 2019, 42, 149–154. [Google Scholar]
- Wu, Y.; Yin, W.; Meng, P. Research on User Location Prediction Method Based on Mobile Phone Signaling Data. J. Change Univ. Sci. Technol. (Nat. Sci. Ed.) 2022, 45, 130–137. [Google Scholar]
- Sun, G.; Qi, H.; Shen, Y.; Yin, B. TCSA-Net: A Temporal-Context-Based Self-Attention Network for Next Location Prediction. IEEE Trans. Intell. Transp. Syst. 2022, 23, 20735–20745. [Google Scholar] [CrossRef]
- Li, T.; Zhu, Y.; Wu, X.; Xiao, Y.; Wu, H. Vehicle Trajectory Prediction Model Based on Bayonet Context and Deep Belief Network. J. Electron. Inf. Technol. 2021, 43, 1323–1330. [Google Scholar]
- Park, S.H.; Kim, B.; Kang, C.M.; Chung, C.C.; Choi, J.W. Sequence-to-sequence prediction of vehicle trajectory via LSTM encoder-decoder architecture. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 1672–1678. [Google Scholar]
- Zhu, Z. Research and Implementation of Vehicle Trajectory Prediction Algorithm Based on Neural Network. Master’s Thesis, Xi’an Electronic and Science University, Xi’an, China, 2018. [Google Scholar]















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).