
A Short-Term Vessel Traffic Flow Prediction Based on a DBO-LSTM Model
Abstract
:1. Introduction
2. Materials and Methods
2.1. DBO Algorithm
- Dung beetle roller
- Brooder ball
- Little dung beetle
- Thief dung beetle
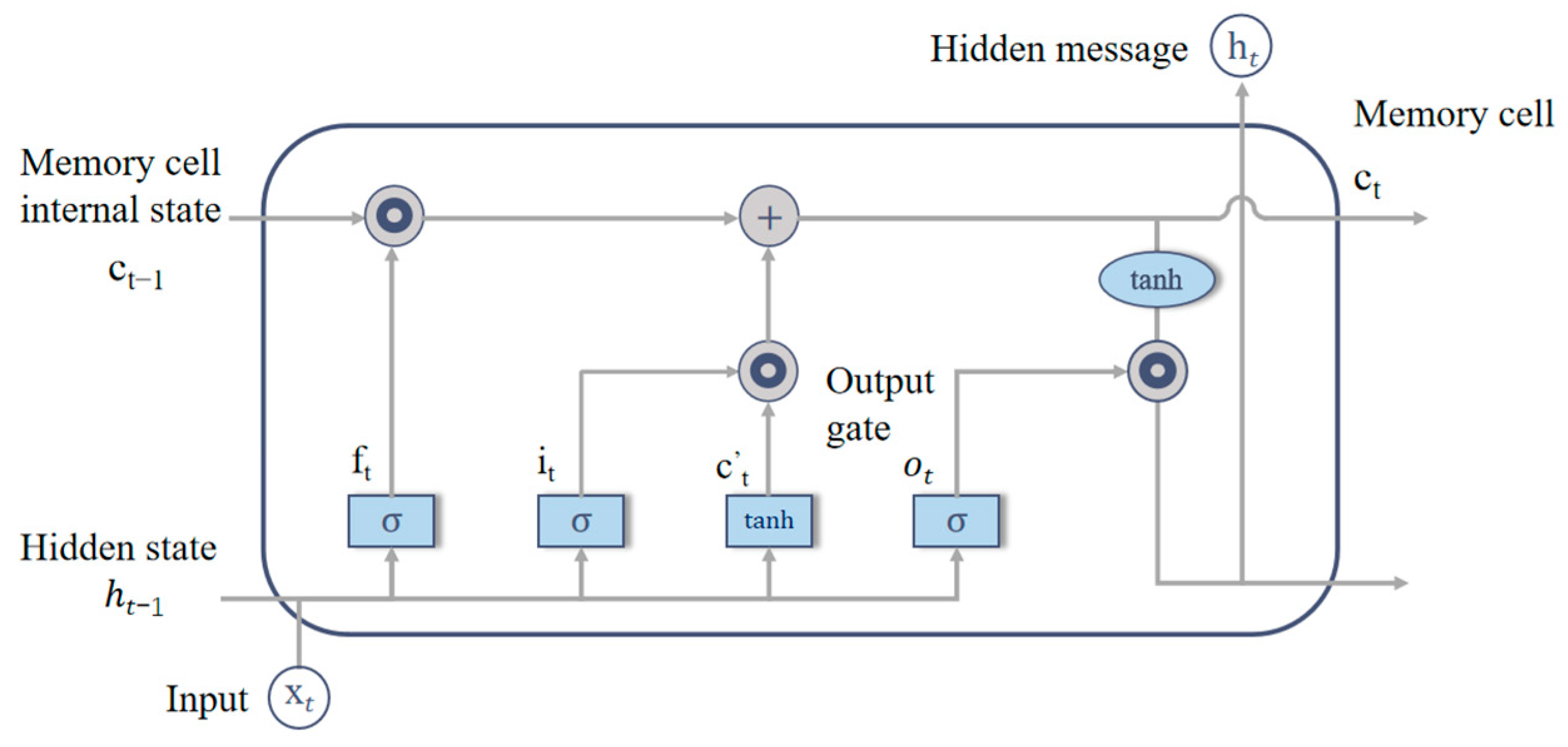
2.2. Long Short-Term Memory Networks
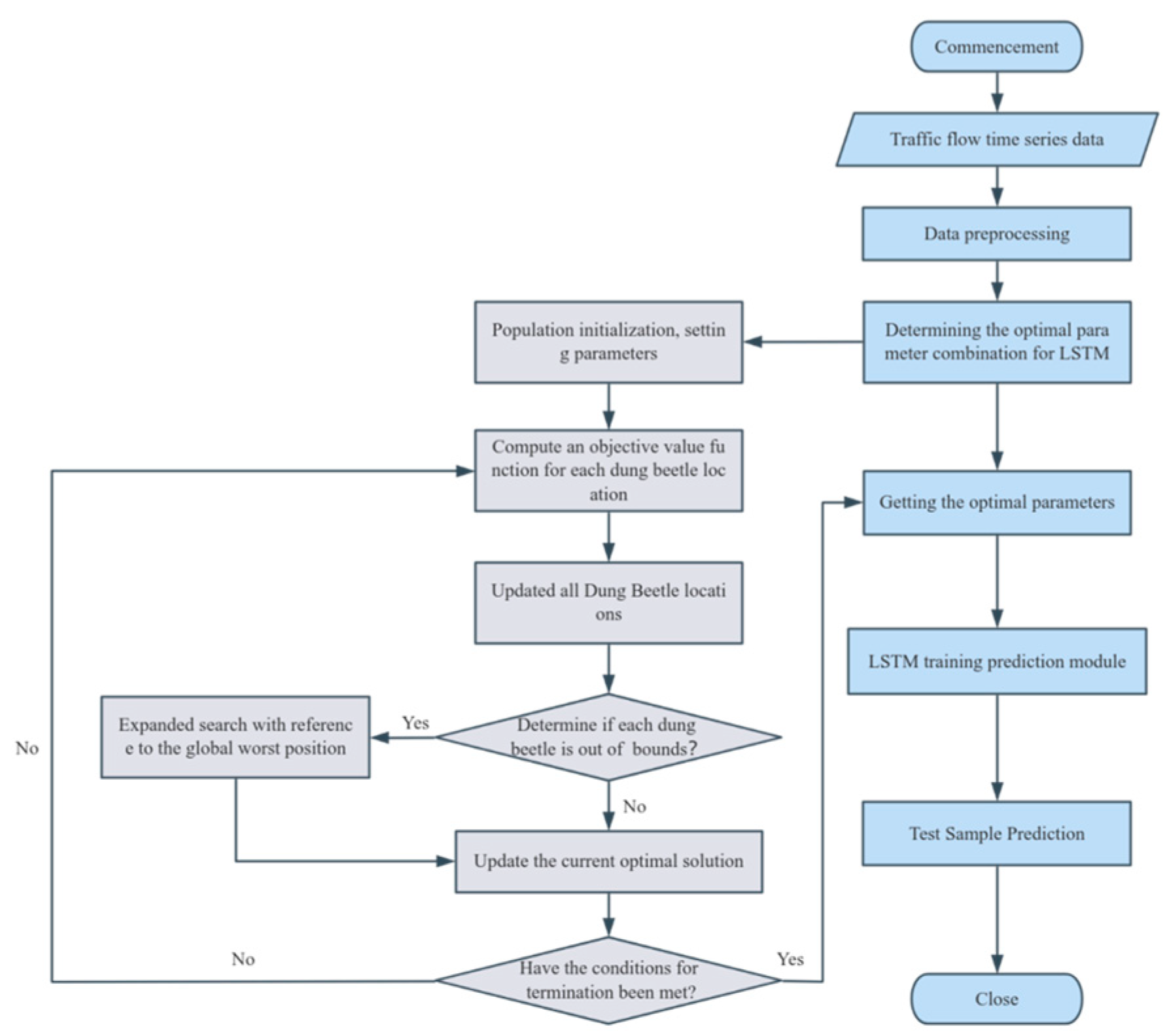
2.3. Combinatorial Predictive Modeling
- Data preprocessing. The historical traffic flow data are first divided into training set and test set, after which they are normalized separately.
- Initialize the population and parameters, and determine the number of nodes in each network layer.
- Model solving. Use the mean square error (MSE) of the LSTM prediction results as the fitness function to obtain the individual fitness of each dung beetle.
- Location update. Judge whether each dung beetle is within the boundary; if not, expand the search range with reference to the global worst position; if it is within the boundary, update the current optimal solution directly.
- Judge whether the termination condition is reached. If not, continue the iterative search for optimization, and if it is reached, terminate the algorithm and output the optimal parameter combination. LSTM is used for training and testing.
- Neurons1, Neurons2, Neurons3 (number of neurons): these parameters indicate the number of neurons in each hidden layer in the DBO-LSTM layer. Usually, the number of neurons in each hidden layer can be adjusted according to the complexity of the task.
- Dropout (dropout rate): dropout is a regularization technique used to reduce overfitting of the model. It specifies the percentage of neurons that are randomly discarded during training.
- Batch size: batch size indicates the number of samples used in each update of the model during training. Larger batch sizes may improve training speed, but may increase memory requirements.
- Epochs: epochs refer to the number of complete traversals of the training dataset. Each epoch contains a series of forward-propagation and back-propagation for updating the weights of the model.
- Optimizer: an optimizer is an algorithm used to update the model weights to reduce the loss function. Common optimizers include Stochastic Gradient Descent (SGD), Adam, RMSprop, and so on.
2.4. Definition of Vessel Traffic Flow Parameters
- Vessel traffic flow
- Vessel traffic speed
- Vessel traffic density
3. Results
3.1. Data Sources and Data Processing
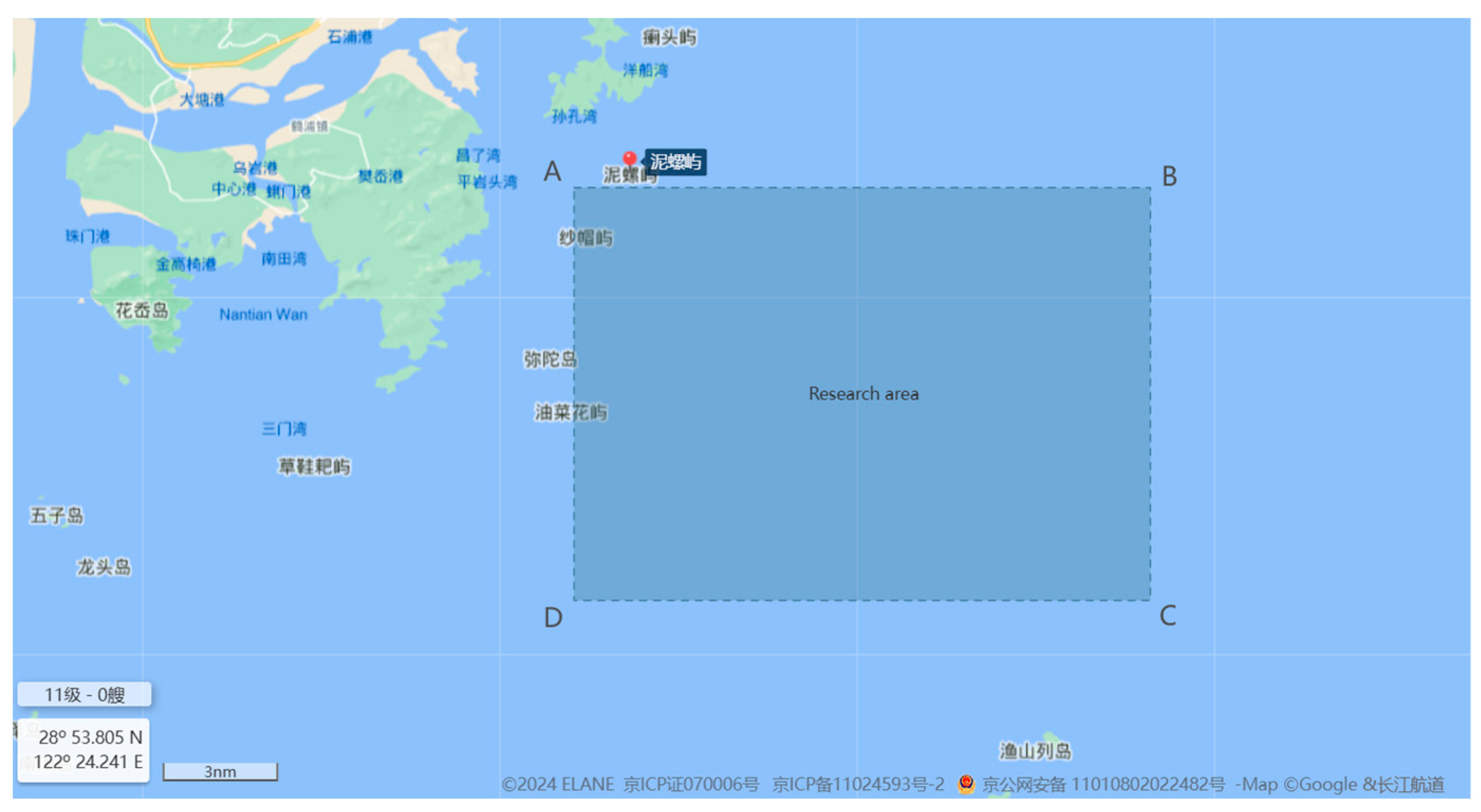
3.1.1. Data Sources
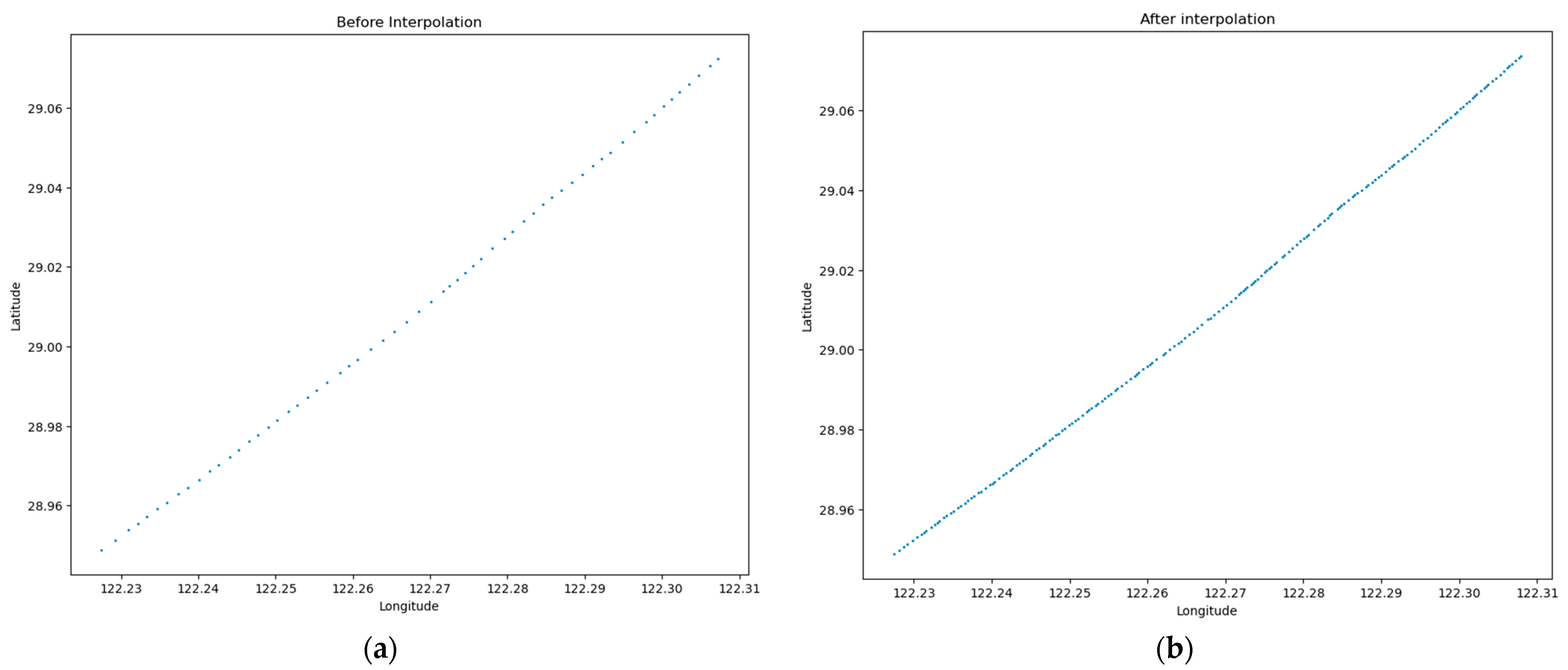
3.1.2. Data Processing
3.2. Extraction of Vessel Traffic Flow Parameters
3.2.1. Vessel Traffic Flow Extraction Method
3.2.2. Vessel Traffic Speed Extraction Method
3.2.3. Vessel Traffic Density Extraction Method
3.3. Dataset
3.4. Experimental Results
3.4.1. Analysis of the Superiority of the DBO Algorithm
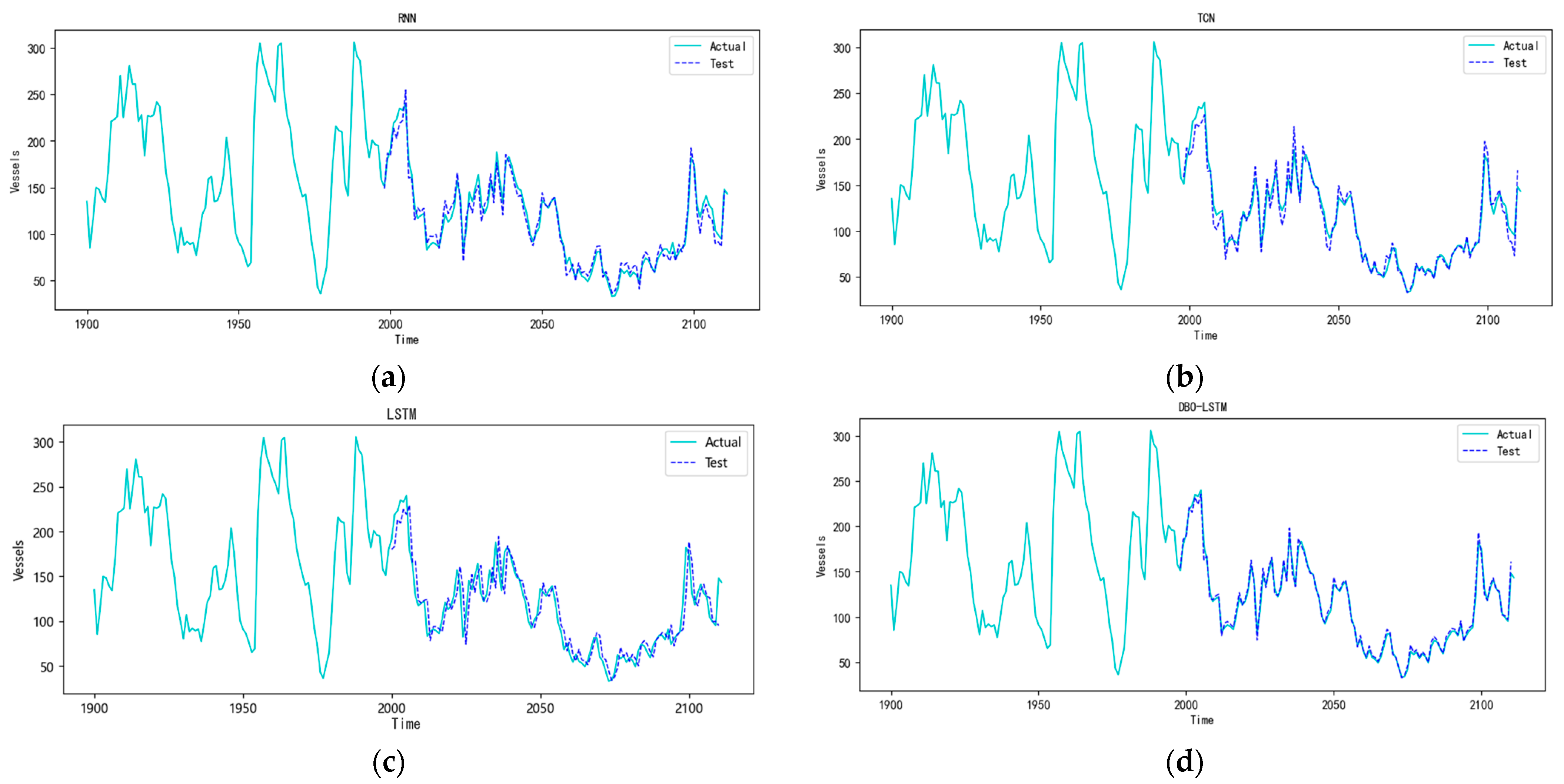
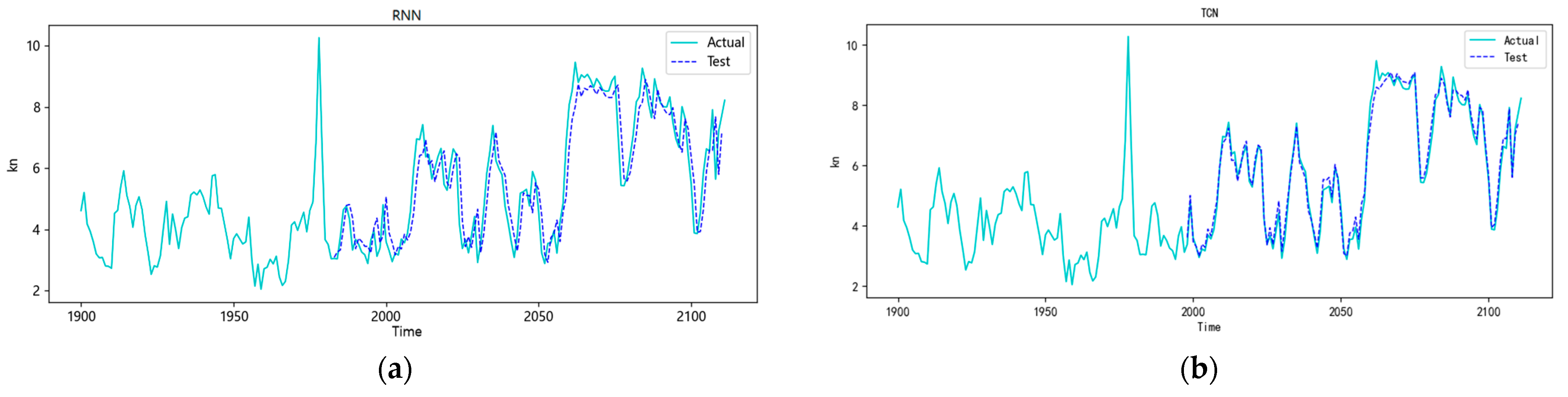
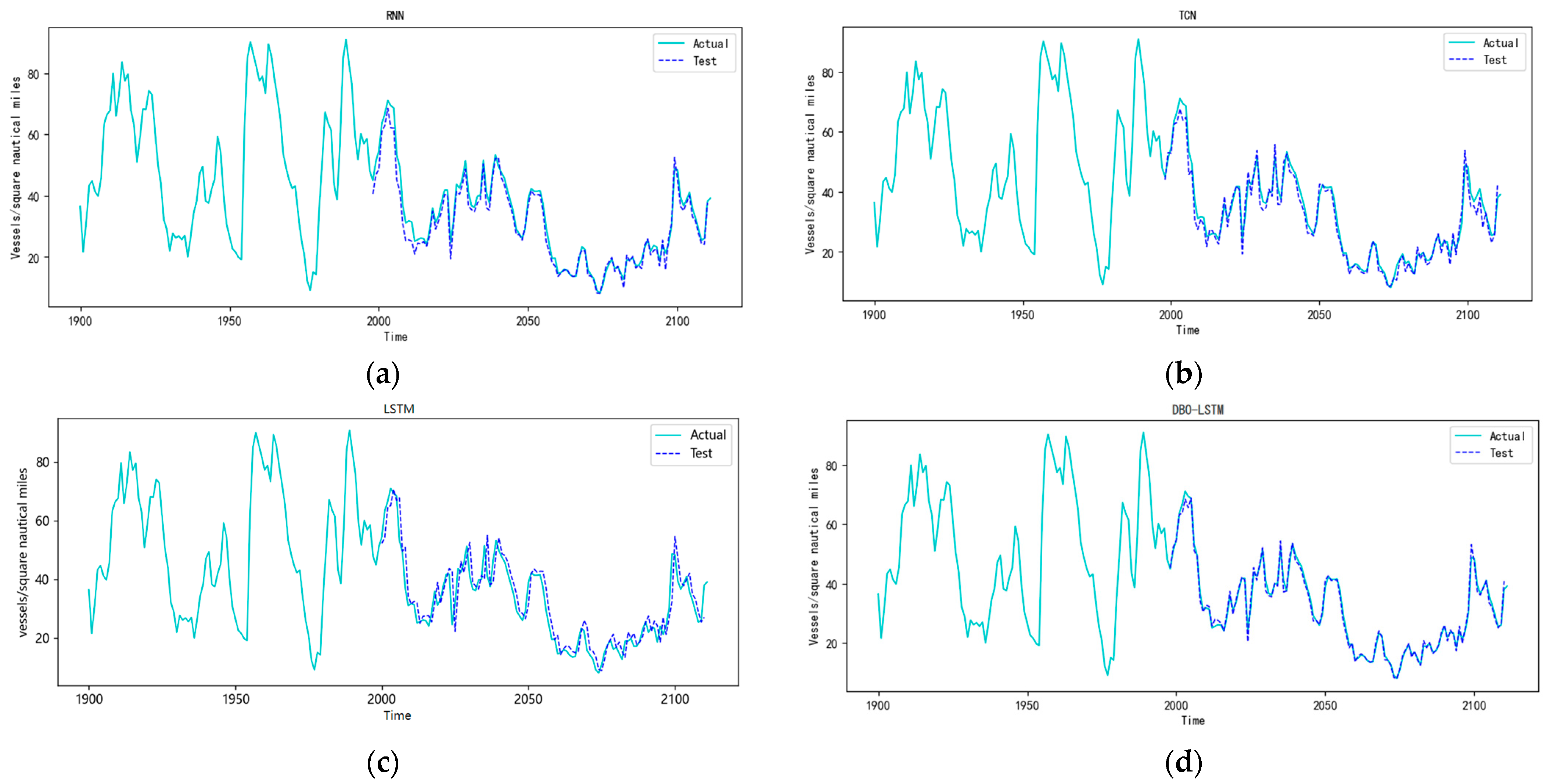
3.4.2. Analysis of DBO-LSTM Model Prediction Effect
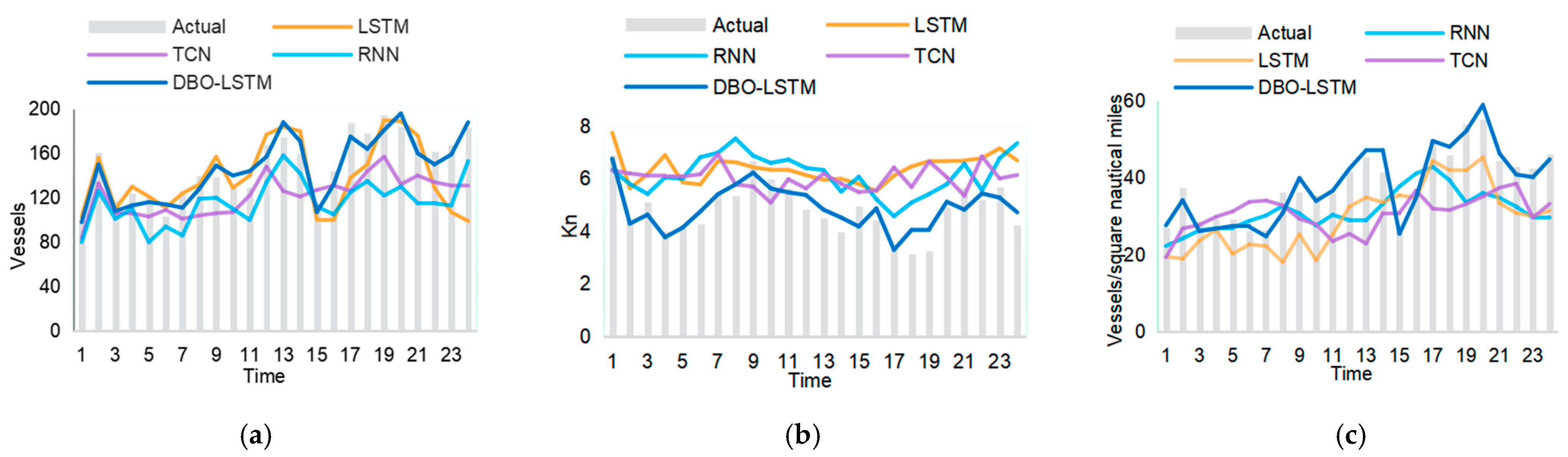
3.4.3. Future Vessel Traffic Flow Prediction Based on DBO-LSTM
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cai, L.; Zhang, Z.; Yang, J.; Yu, Y.; Zhou, T.; Qin, J. A noise-immune Kalman filter for short-term traffic flow forecasting. Phys. A Stat. Mech. Its Appl. 2019, 536, 122601. [Google Scholar] [CrossRef]
- He, W.; Zhong, C.; Sotelo, M.A.; Chu, X.; Liu, X.; Li, Z. Short-term vessel traffic flow forecasting by using an improved Kalman model. Clust. Comput. 2019, 22, 7907–7916. [Google Scholar] [CrossRef]
- Xiao, X.; Duan, H. A new grey model for traffic flow mechanics. Eng. Appl. Artif. Intell. 2020, 88, 103350. [Google Scholar] [CrossRef]
- Ahn, J.; Ko, E.; Kim, E.Y. Highway traffic flow prediction using support vector regression and Bayesian classifier. In Proceedings of the 2016 International Conference on Big Data and Smart Computing (BigComp), Hong Kong, China, 18–20 January 2016; pp. 239–244. [Google Scholar]
- Williams, B.M. Modeling and Forecasting Vehicular Traffic Flow as a Seasonal Stochastic Time Series Process. Doctoral Dissertation, University of Virginia, Charlottesville, VA, USA, 1999. 9916358. [Google Scholar] [CrossRef]
- Yin, H.; Wong, S.C.; Xu, J.; Wong, C. Urban traffic flow prediction using a fuzzy-neural approach. Transp. Res. Part C Emerg. Technol. 2002, 10, 85–98. [Google Scholar] [CrossRef]
- Tian, X.; Zheng, Z.; Zeng, S. Research on the application of WLSM in Ship Traffic Fundamental Diagram Model. In Proceedings of the 2020 2nd International Conference on Robotics Systems and Vehicle Technology, Xiamen, China, 3–5 December 2020; pp. 39–44. [Google Scholar]
- Zhao, S.; Wu, H.; Liu, C. Traffic flow prediction based on optimized hidden Markov model. J. Phys. Conf. Ser. 2019, 1168, 052001. [Google Scholar] [CrossRef]
- Zhang, N.; Zhang, Y.; Lu, H. Seasonal autoregressive integrated moving average and support vector machine models: Prediction of short-term traffic flow on freeways. Transp. Res. Rec. 2011, 2215, 85–92. [Google Scholar] [CrossRef]
- Liu, Y.; Wu, H. Prediction of road traffic congestion based on random forest. In Proceedings of the 2017 10th International Symposium on Computational Intelligence and Design (ISCID), Hangzhou, China, 9–10 December 2017; Volume 2, pp. 361–364. [Google Scholar]
- Koochali, A.; Schichtel, P.; Ahmed, S.; Dengel, A. Probabilistic Forecasting of Sensory Data with Generative Adversarial Networks—ForGAN. IEEE Access 2019, 7, 63868–63880. [Google Scholar] [CrossRef]
- Cai, L.; Lei, M.; Zhang, S.; Yu, Y.; Zhou, T.; Qin, J. A noise-immune LSTM network for short-term traffic flow forecasting. Chaos Interdiscip. J. Nonlinear Sci. 2020, 30, 023135. [Google Scholar] [CrossRef] [PubMed]
- Zhao, L.; Wang, Q.; Jin, B.; Ye, C. Short-term traffic flow intensity prediction based on CHS-LSTM. Arab. J. Sci. Eng. 2020, 45, 10845–10857. [Google Scholar] [CrossRef]
- Ma, D.; Song, X.; Li, P. Daily Traffic Flow Forecasting Through a Contextual Convolutional Recurrent Neural Network Modeling Inter-and Intra-Day Traffic Patterns. IEEE Trans. Intell. Transp. Syst. 2021, 11, 2627–2636. [Google Scholar] [CrossRef]
- Fang, W.; Zhuo, W.; Song, Y.; Yan, J.; Zhou, T.; Qin, J. Δfree-LSTM: An error distribution free deep learning for short-term traffic flow forecasting. Neurocomputing 2023, 526, 180–190. [Google Scholar] [CrossRef]
- Yu, W.; Du, T.; Zhang, W. Short-time traffic flow prediction using fuzzy wavelet neural network based on master-slave PSO. In Proceedings of the 2008 Fourth International Conference on Natural Computation, Jinan, China, 18–20 October 2008; Volume 3, pp. 321–325. [Google Scholar]
- Luo, X.; Li, D.; Yang, Y.; Zhang, S. Short-term Traffic Flow Prediction Based on KNN-LSTM. J. Beijing Univ. Technol. 2018, 44, 1521–1527. [Google Scholar] [CrossRef]
- Liu, F.; Wei, Z.; Huang, Z.; Lu, Y.; Hu, X.; Shi, L. A multi-grouped ls-svm method for short-term urban traffic flow prediction. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Qiao, Y.; Wang, Y.; Ma, C.; Yang, J. Short-term traffic flow prediction based on 1DCNN-LSTM neural network structure. Mod. Phys. Lett. B 2021, 35, 2150042. [Google Scholar] [CrossRef]
- Zhou, W.; Wang, W. Multi-Step Short-Term Traffic Flow Prediction Based on a Novel Hybrid ARIMA-LSTM Neural Network. In Proceedings of the 20th COTA International Conference of Transportation Professionals, Xi’an, China, 14–16 August 2020. [Google Scholar] [CrossRef]
- Zhang, K.; Chu, Z.; Xing, J.; Zhang, H.; Cheng, Q. Urban Traffic Flow Congestion Prediction Based on a Data-Driven Model. Mathematics 2023, 11, 4075. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, W. Dynamic maritime traffic pattern recognition with online cleaning, compression, partition, and clustering of AIS data. Sensors 2022, 22, 6307. [Google Scholar] [CrossRef] [PubMed]
- Ismaeel, A.G.; Mary, J.; Chelliah, A.; Logeshwaran, J.; Mahmood, S.N.; Alani, S.; Shather, A.H. Enhancing Traffic Intelligence in Smart Cities Using Sustainable Deep Radial Function. Sustainability 2023, 15, 14441. [Google Scholar] [CrossRef]
- Zhou, X.; Liu, Z.; Wang, F.; Xie, Y.; Zhang, X. Using deep learning to forecast maritime vessel flows. Sensors 2020, 20, 1761. [Google Scholar] [CrossRef] [PubMed]
- El Mekkaoui, S.; Benabbou, L.; Caron, S.; Berrado, A. Deep Learning-Based Ship Speed Prediction for Intelligent Maritime Traffic Management. J. Mar. Sci. Eng. 2023, 11, 191. [Google Scholar] [CrossRef]
- Su, G.; Liang, T.; Wang, M. Prediction of vessel traffic volume in ports based on improved fuzzy neural network. IEEE Access 2020, 8, 71199–71205. [Google Scholar] [CrossRef]
- Xu, T.; Zhang, Q. Ship Traffic Flow Prediction in Wind Farms Water Area Based on Spatiotemporal Dependence. J. Mar. Sci. Eng. 2022, 10, 295. [Google Scholar] [CrossRef]
- Hu, X.; Yan, Z.; Hao, Z. Predict Vessel Traffic with Weather Conditions Based on Multimodal Deep Learning. J. Mar. Sci. Eng. 2022, 11, 39. [Google Scholar] [CrossRef]
- Li, Y.; Liang, M.; Li, H.; Yang, Z.; Du, L.; Chen, Z. Deep learning-powered vessel traffic flow prediction with spatial-temporal attributes and similarity grouping. Eng. Appl. Artif. Intell. 2023, 126, 107012. [Google Scholar] [CrossRef]
- Zhang, Z.; Yin, J.; Wang, N.; Hui, Z. Vessel traffic flow analysis and prediction by an improved PSO-BP mechanism based on AIS data. Evol. Syst. 2019, 10, 397–407. [Google Scholar] [CrossRef]
- Qing, L. Design of Online Monitoring System for Water Quality COD Based on Ultraviolet-Visible Spectroscopy. Master’s Thesis, Southwest University of Science and Technology, Mianyang, China, 2023. [Google Scholar]
- Xue, J.; Shen, B. Dung beetle optimizer: A new meta-heuristic algorithm for global optimization. J. Supercomput. 2022, 79, 7305–7336. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Awad, N.H.; Ali, M.Z.; Liang, J.J.; Qu, B.Y.; Suganthan, P.N. Problem Definitions and Evaluation Criteria for the CEC 2017 Special Session and Competition on Single Objective Bound Constrained Real-Parameter Numerical Optimization; Technical Report; Nanyang Technological University: Singapore, 2016; pp. 1–34. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Sequence Number | Time Period (Hour) | Vessel Traffic Flow (Vessels) | Vessel Traffic Flow Speed (kn) | Vessel Traffic Flow Density (Vessels/Square Nautical Mile) |
|---|---|---|---|---|
| 1 | 2023/2/1 0:00 | 88 | 3.63 | 27.56 |
| 2 | 2023/2/1 1:00 | 70 | 2.37 | 22.47 |
| … | … | … | … | … |
| 2110 | 2023/4/29 21:00 | 95 | 7.20 | 25.98 |
| 2111 | 2023/4/29 22:00 | 148 | 7.71 | 38.10 |
| 2112 | 2023/4/29 23:00 | 143 | 8.22 | 39.15 |
| Function Categories | Test Functions | Dimension | Range of Independent Variables | Theoretical Value |
|---|---|---|---|---|
| Unimodal functions | CEC1 | 30 | [−100, 100] D * | 100 |
| CEC3 | 30 | [−100, 100] D | 300 | |
| Simple multimodal functions | CEC4 | 30 | [−100, 100] D | 400 |
| CEC7 | 30 | [−100, 100] D | 700 | |
| CEC8 | 30 | [−100, 100] D | 800 | |
| Hybrid functions | CEC13 | 30 | [−100, 100] D | 1300 |
| CEC15 | 30 | [−100, 100] D | 1500 | |
| CEC19 | 30 | [−100, 100] D | 1900 | |
| Composition functions | CEC22 | 30 | [−100, 100] D | 2200 |
| CEC23 | 30 | [−100, 100] D | 2300 | |
| CEC26 | 30 | [−100, 100] D | 2600 | |
| CEC28 | 30 | [−100, 100] D | 2800 |
| DBO-LSTM Model Parameter Values | Prediction Model for Each Traffic Flow Parameter | ||
|---|---|---|---|
| Vessel Traffic Flow | Vessel Traffic Flow Speed | Vessel Traffic Flow Density | |
| look-back | 100 | 81.7142 | 100 |
| nenurous1 | 128 | 42.1858 | 64.3353 |
| nenurous2 | 125.8540 | 74.6762 | 128 |
| nenurous3 | 84.7515 | 17.0829 | 111.6725 |
| dropout | 0.4155 | 0.0846 | 0.5 |
| batch size | 40.0226 | 19.7517 | 62.6214 |
| epochs | 100 | 100 | 100 |
| optimizer | Adam | Adam | Adam |
| Model | Vessel Traffic Flow | Vessel Traffic Flow Speed | Vessel Traffic Flow Density | ||||||
|---|---|---|---|---|---|---|---|---|---|
| MAE | RMSE | MRE | MAE | RMSE | MRE | MAE | RMSE | MRE | |
| RNN | 17.14 | 1.78 | 0.13 | 0.61 | 0.06 | 0.14 | 5.29 | 0.52 | 0.15 |
| TCN | 18.89 | 1.77 | 0.68 | 0.60 | 0.06 | 0.45 | 5.69 | 0.53 | 0.83 |
| LSTM | 12.99 | 1.70 | 0.13 | 0.60 | 0.05 | 0.13 | 5.12 | 0.51 | 0.14 |
| DBO—LSTM | 8.70 | 1.09 | 0.05 | 0.32 | 0.02 | 0.08 | 1.43 | 0.37 | 0.05 |
| Model | Vessel Traffic Flow | Vessel Traffic Flow Speed | Vessel Traffic Flow Density | ||||||
|---|---|---|---|---|---|---|---|---|---|
| MAE | RMSE | MRE | MAE | RMSE | MRE | MAE | RMSE | MRE | |
| RNN | 49.38 | 11.18 | 0.33 | 2.10 | 0.49 | 0.48 | 10.72 | 2.55 | 0.27 |
| TCN | 22.88 | 5.47 | 0.15 | 1.24 | 0.30 | 0.29 | 8.73 | 2.23 | 0.21 |
| LSTM | 18.17 | 5.68 | 0.12 | 1.78 | 0.41 | 0.42 | 17.18 | 3.88 | 0.42 |
| DBO-LSTM | 10.75 | 2.26 | 0.07 | 0.40 | 0.10 | 0.09 | 2.16 | 0.52 | 0.06 |
| Algorithm | Parameter | Value |
|---|---|---|
| DBO | k | 0.1 |
| b | 0.3 | |
| s | 0.5 | |
| PSO | Topology | Fully connected |
| C1 | 2 | |
| C2 | 2 | |
| GWO | amin | 0 |
| amax | 2 | |
| SSA | Leader position update | 0.5 |
| probability | ||
| V0 | 0 | |
| WOA | ɑ | Decreased from 2 to 0 |
| DBO | PSO | GWO | SSA | WOA | ||
|---|---|---|---|---|---|---|
| F1 | BEST | 290.54 | 3,043,455.62 | 996,495,230.04 | 66,043.62 | 2,536,752,041.83 |
| STD | 5787.82 | 176,277,337.26 | 2,017,790,760.95 | 1,560,777,518.97 | 1,231,407,961.33 | |
| AVG | 5456.92 | 248,649,968.86 | 3,313,768,370.92 | 964,564,053.40 | 4,756,114,730.11 | |
| F3 | BEST | 27,086.66 | 64,647.93 | 33,642.33 | 65,366.26 | 149,361.16 |
| STD | 10,275.73 | 34,239.17 | 21,283.26 | 36,665.42 | 60,711.10 | |
| AVG | 46,632.03 | 95,141.18 | 63,377.32 | 97,545.74 | 259,184.93 | |
| F4 | BEST | 404.17 | 516.14 | 523.10 | 468.21 | 747.69 |
| STD | 28.06 | 204.55 | 58.99 | 228.63 | 403.88 | |
| AVG | 500.26 | 693.62 | 609.15 | 658.88 | 1472.44 | |
| F7 | BEST | 830.34 | 921.94 | 836.11 | 1144.54 | 862.84 |
| STD | 35.60 | 89.06 | 53.35 | 70.30 | 115.69 | |
| AVG | 882.03 | 1116.49 | 917.14 | 1313.88 | 1015.86 | |
| F8 | BEST | 861.57 | 980.18 | 865.19 | 905.52 | 928.82 |
| STD | 29.31 | 54.19 | 23.82 | 58.78 | 26.04 | |
| AVG | 905.53 | 1069.17 | 905.88 | 1019.02 | 980.14 | |
| F13 | BEST | 2033.01 | 5897.09 | 31,976.54 | 81,077.38 | 878,582.42 |
| STD | 1,349,367.13 | 23,844.93 | 20,342,174.55 | 56,807,033.72 | 50,058,920.84 | |
| AVG | 477,203.45 | 31,761.84 | 12,491,682.16 | 17,643,672.55 | 19,316,335.79 | |
| F15 | BEST | 1752.17 | 1840.76 | 5603.07 | 1876.29 | 201,676.74 |
| STD | 11,235.37 | 8581.38 | 1,323,884.66 | 8576.14 | 8,061,592.55 | |
| AVG | 12,031.02 | 8119.29 | 321,947.60 | 8177.42 | 7,399,521.03 | |
| F19 | BEST | 1972.78 | 2097.15 | 14,414.23 | 8948.28 | 92,326.72 |
| STD | 381,128.99 | 9127.73 | 7,704,779.30 | 7,479,505.78 | 911,157.77 | |
| AVG | 88,850.83 | 9019.18 | 3,464,630.50 | 2,961,040.96 | 2,633,039.41 | |
| F22 | BEST | 2300.02 | 2370.01 | 2311.10 | 2471.88 | 2950.73 |
| STD | 2129.34 | 2576.807 | 2061.98 | 2110.97 | 1914.14 | |
| AVG | 5678.16 | 4902.998 | 4330.72 | 5425.15 | 8033.52 | |
| F23 | BEST | 2716.51 | 2755.37 | 2867.65 | 2745.08 | 2944.67 |
| STD | 64.50 | 90.95 | 103.40 | 79.42 | 101.98 | |
| AVG | 2807.46 | 2904.32 | 3023.63 | 2919.58 | 3146.57 | |
| F26 | BEST | 2800.15 | 4341.23 | 2817.11 | 4024.52 | 4949.68 |
| STD | 1132.02 | 421.55 | 1120.76 | 995.52 | 1226.52 | |
| AVG | 6428.55 | 5081.44 | 5052.05 | 6996.78 | 8314.16 | |
| F28 | BEST | 3193.02 | 3218.89 | 3306.92 | 3279.85 | 3506.11 |
| STD | 18.17 | 115.43 | 104.87 | 774.83 | 273.09 | |
| AVG | 3221.97 | 3323.06 | 3479.73 | 3694.62 | 3820.83 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, Z.; Zhou, Y.; Bao, X. A Short-Term Vessel Traffic Flow Prediction Based on a DBO-LSTM Model. Sustainability 2024, 16, 5499. https://doi.org/10.3390/su16135499
Dong Z, Zhou Y, Bao X. A Short-Term Vessel Traffic Flow Prediction Based on a DBO-LSTM Model. Sustainability. 2024; 16(13):5499. https://doi.org/10.3390/su16135499
Chicago/Turabian StyleDong, Ze, Yipeng Zhou, and Xiongguan Bao. 2024. "A Short-Term Vessel Traffic Flow Prediction Based on a DBO-LSTM Model" Sustainability 16, no. 13: 5499. https://doi.org/10.3390/su16135499