
Application of Robust Super Twisting to Load Frequency Control of a Two-Area System Comprising Renewable Energy Resources

Abstract
:1. Introduction
- The use of two new metaheuristic techniques, namely HO and OOBO, to specify the optimal parameters of the sliding surface used in ST.
- The application of the ST technique of the SMC to LFC, which is better suited for use in the case of nonlinear control and parameter change.
- The results are verified by comparing the ST performance with two recent metaheuristic methods, i.e., HO and OOBO, which are used to obtain the optimal PI controller gains.
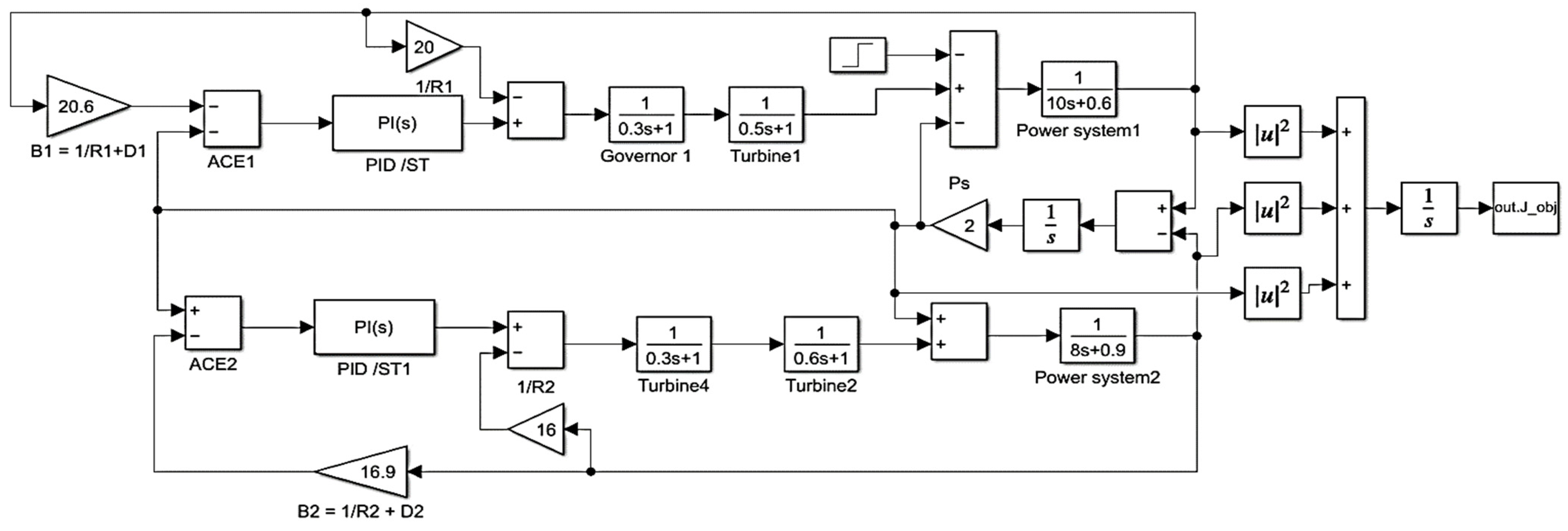
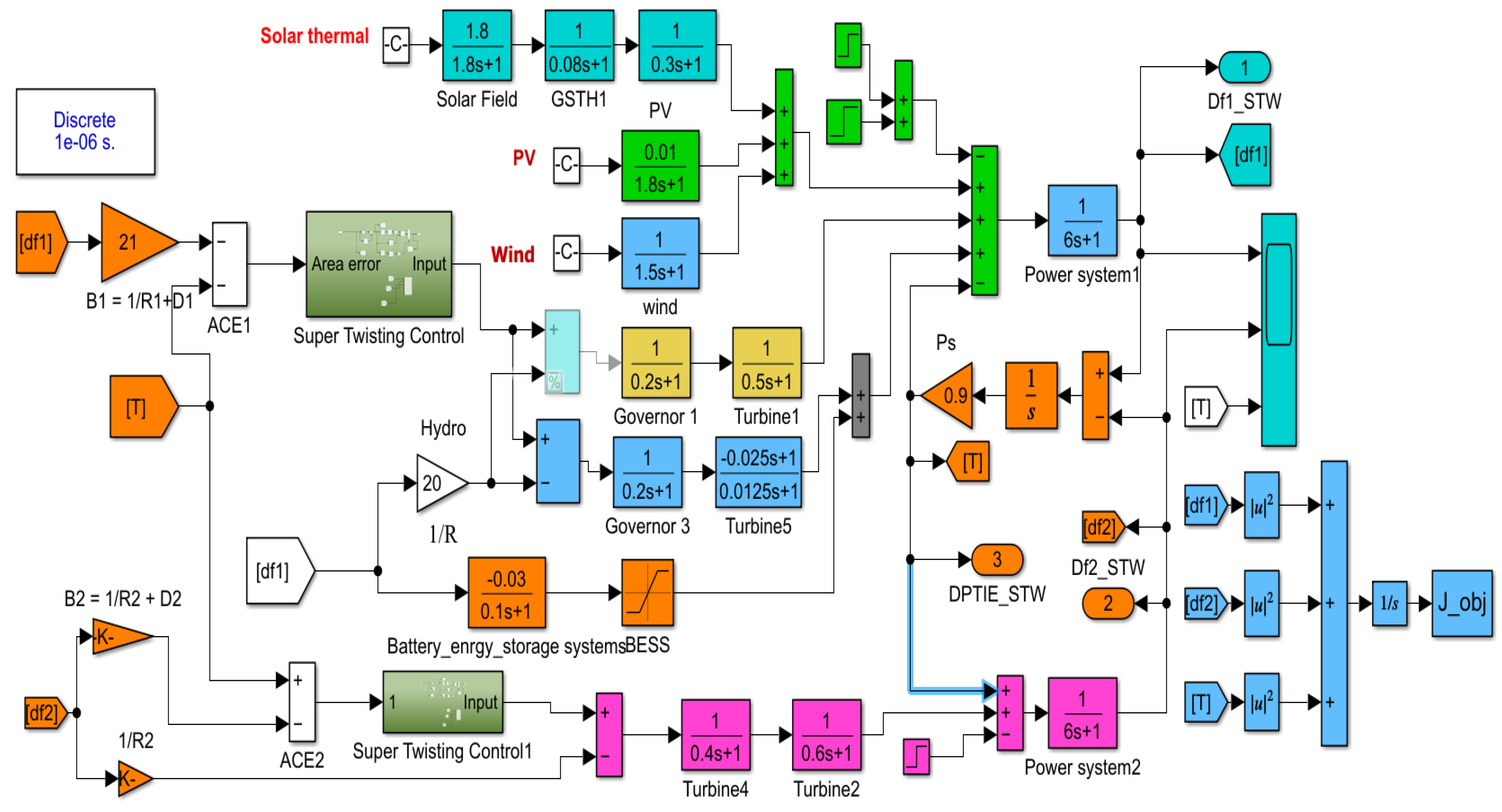
2. System Modelling
2.1. Solar Thermal Power Plant
2.2. Photovoltaic Power Plant
2.3. Wind Turbine Power Plant
2.4. Hydro-Power Plant
2.5. Battery Energy Storage System
2.6. The Power System
3. Hippopotamus and One-to-One Based Optimizers
4. Sliding Mode Control and Super Twisting
4.1. Super Twisting Control Law
4.2. Validation of the Proposed Scheme
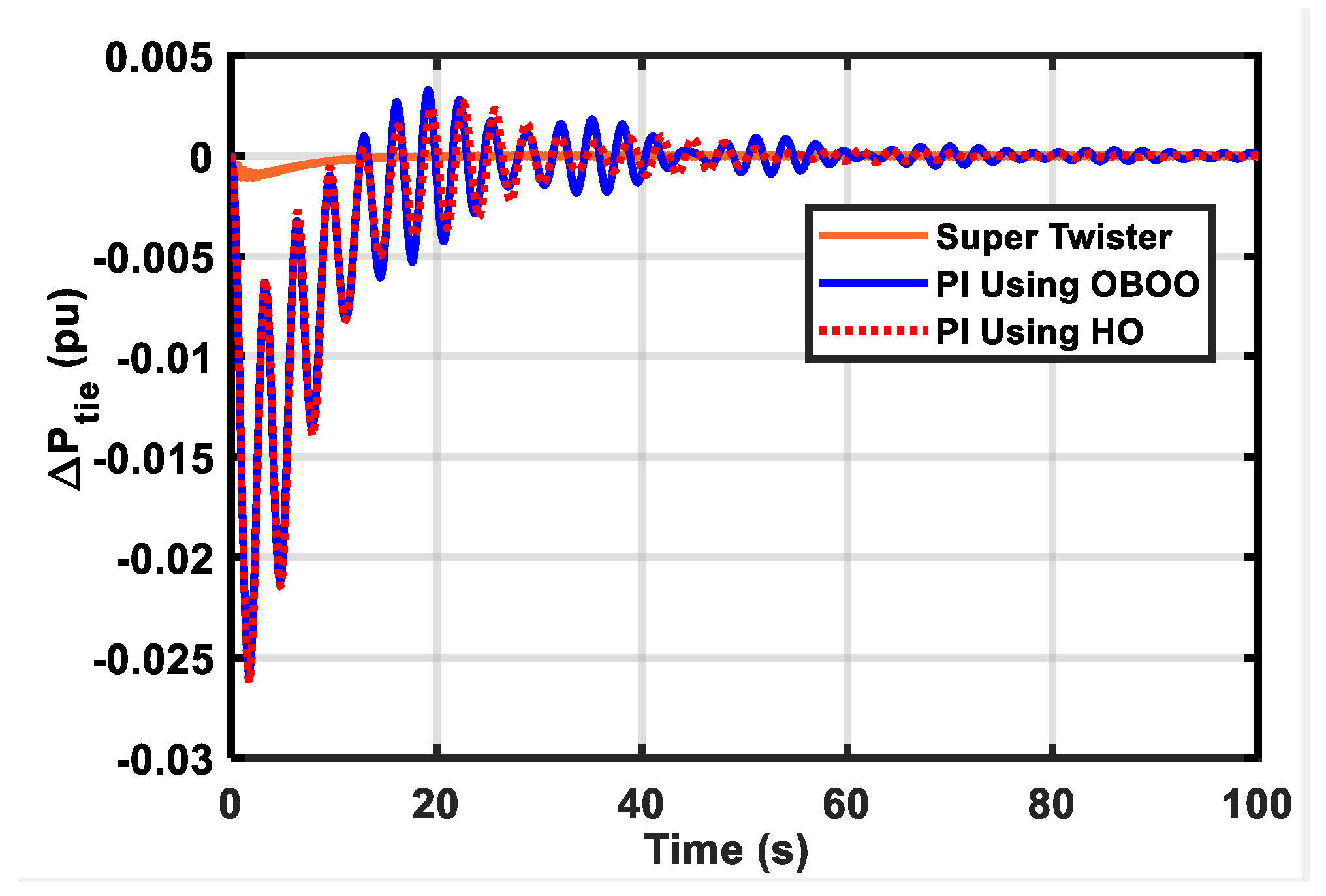
5. Simulation Results
5.1. Case 1
5.2. Case 2
5.3. Case 3
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ali, T.; Malik, S.A.; Daraz, A.; Adeel, M.; Aslam, S.; Herodotou, H. Load Frequency Control and Automatic Voltage Regulation in Four-Area Interconnected Power Systems Using a Gradient-Based Optimizer. Energies 2023, 16, 2086. [Google Scholar] [CrossRef]
- Grover, H.; Verma, A.; Bhatti, T.S. Load Frequency Control & Automatic Voltage Regulation for a Single Area Power System. In Proceedings of the 2020 IEEE 9th Power India International Conference (PIICON), Sonepat, India, 28 February–1 March 2020. [Google Scholar]
- Babu, N.R.; Bhagat, S.K.; Saikia, L.C.; Chiranjeevi, T.; Devarapalli, R.; Márquez, F.P.G. A Comprehensive Review of Recent Strategies on Automatic Generation Control/Load Frequency Control in Power Systems. Arch. Comput. Methods Eng. 2022, 30, 543–572. [Google Scholar] [CrossRef]
- Ranjan, M.; Shankar, R. A literature survey on load frequency control considering renewable energy integration in power system: Recent trends and future prospects. J. Energy Storage 2022, 45, 103717. [Google Scholar] [CrossRef]
- Sharma, D. Load Frequency Control: A Literature Review. Int. J. Sci. Technol. Res. 2020, 9, 6421–6437. [Google Scholar]
- Liu, X.; Qiao, S.; Liu, Z. A Survey on Load Frequency Control of Multi-Area Power Systems: Recent Challenges and Strategies. Energies 2023, 16, 2323. [Google Scholar] [CrossRef]
- Kumari, S.; Pathak, P.K. State-of-the-Art Review on Recent Load Frequency Control Architectures of Various Power System Configurations. Electr. Power Compon. Syst. 2024, 52, 722–765. [Google Scholar] [CrossRef]
- Sönmez, Ş.; Ayasun, S. Gain and phase margins based delay-dependent stability analysis of single-area load frequency control system with constant communication time delay. Trans. Inst. Meas. Control 2017, 40, 014233121769022. [Google Scholar] [CrossRef]
- Weldcherkos, T.; Salau, A.O.; Ashagrie, A. Modeling and design of an automatic generation control for hydropower plants using Neuro-Fuzzy controller. Energy Rep. 2021, 7, 6626–6637. [Google Scholar] [CrossRef]
- Sagar, P.S.V.; Swarup, K.S. Load frequency control in isolated micro-grids using centralized model predictive control. In Proceedings of the 2016 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Trivandrum, India, 14–17 December 2016. [Google Scholar]
- Pathak, P.K.; Yadav, A.K.; Padmanaban, S.; Kamwa, I. Fractional Cascade LFC for Distributed Energy Sources via Advanced Optimization Technique under High Renewable Shares. IEEE Access 2022, 10, 92828–92842. [Google Scholar] [CrossRef]
- Elkasem, A.H.A.; Kamel, S.; Khamies, M.; Nasrat, L. Frequency regulation in a hybrid renewable power grid: An effective strategy utilizing load frequency control and redox flow batteries. Sci. Rep. 2024, 14, 9576. [Google Scholar] [CrossRef]
- Huang, C.; Yang, M.; Ge, H.; Deng, S.; Chen, C. DMPC-based load frequency control of multi-area power systems with heterogeneous energy storage system considering SoC consensus. Electr. Power Syst. Res. 2024, 228, 110064. [Google Scholar] [CrossRef]
- Fosha, C.E.; Elgerd, O.I. The Megawatt-Frequency Control Problem: A New Approach Via Optimal Control Theory. IEEE Trans. Power Appar. Syst. 1970, 89, 563–577. [Google Scholar] [CrossRef]
- Jagessar, D.R.; Dorile, P.O.; McCann, R.A. Design of a Linear Optimal Quadratic Regulator for Frequency Control in a Two-Area Deregulated Power Market. In Proceedings of the 2021 International Conference on Technology and Policy in Energy and Electric Power (ICT-PEP), Jakarta, Indonesia, 29–30 September 2021. [Google Scholar]
- Muthukumari, S.; Kanagalakshmi, S.; Kumar, T.K.S. Optimal Tuning of LQR for Load Frequency Control in Deregulated Power System for Given Time Domain Specifications. In Proceedings of the 2019 29th Australasian Universities Power Engineering Conference (AUPEC), Nadi, Fiji, 26–29 November 2019. [Google Scholar]
- Thenmalar, K. Fuzzy logic based load frequency control of power system. Mater. Today Proc. 2021, 45, 8170–8175. [Google Scholar]
- Kumar, N.K.; Gopi, R.S.; Kuppusamy, R.; Nikolovski, S.; Teekaraman, Y.; Vairavasundaram, I.; Venkateswarulu, S. Fuzzy Logic-Based Load Frequency Control in an Island Hybrid Power System Model Using Artificial Bee Colony Optimization. Energies 2022, 15, 2199. [Google Scholar] [CrossRef]
- Al-Majidi, S.D.; Al-Nussairi, M.K.; Mohammed, A.J.; Dakhil, A.M.; Abbod, M.F.; Al-Raweshidy, H.S. Design of a Load Frequency Controller Based on an Optimal Neural Network. Energies 2022, 15, 6223. [Google Scholar] [CrossRef]
- Mohseni, N.A.; Bayati, N. Robust Multi-Objective H2/H∞ Load Frequency Control of Multi-Area Interconnected Power Systems Using TS Fuzzy Modeling by Considering Delay and Uncertainty. Energies 2022, 15, 5525. [Google Scholar] [CrossRef]
- Sondhi, S.; Hote, Y.V. Fractional order PID controller for load frequency control. Energy Convers. Manag. 2014, 85, 343–353. [Google Scholar] [CrossRef]
- Ahmed, M.; Magdy, G.; Khamies, M.; Kamel, S. Modified TID controller for load frequency control of a two-area interconnected diverse-unit power system. Int. J. Electr. Power Energy Syst. 2022, 135, 107528. [Google Scholar] [CrossRef]
- Ogar, V.N.; Hussain, S.; Gamage, K.A.A. Load Frequency Control Using the Particle Swarm Optimisation Algorithm and PID Controller for Effective Monitoring of Transmission Line. Energies 2023, 16, 5748. [Google Scholar] [CrossRef]
- Daneshfar, F.; Bevrani, H. Load–Frequency Control: A GA-Based Multi-Agent Reinforcement Learning. IET Gener. Transm. Dis. 2010, 4, 13–26. [Google Scholar] [CrossRef]
- Ramjug-Ballgobin, R.; Ramlukon, C. A hybrid metaheuristic optimisation technique for load frequency control. SN Appl. Sci. 2021, 3, 547. [Google Scholar] [CrossRef]
- Alahakoon, S.; Roy, R.B.; Arachchillage, S.J. Optimizing Load Frequency Control in Standalone Marine Microgrids Using Meta-Heuristic Techniques. Energies 2023, 16, 4846. [Google Scholar] [CrossRef]
- Ahmed, M.; Mansor, M.; Feyad, H.; Taha, E.; Abdullah, G. An Optimal LFC in Two-Area Power Systems Using a Meta-heuristic Optimization Algorithm. Int. J. Electr. Comput. Eng. 2017, 7, 3217–3225. [Google Scholar]
- Dashtdar, M.; Flah, A.; Hosseinimoghadam, S.M.S.; El-Fergany, A. Frequency control of the islanded microgrid including energy storage using soft computing. Sci. Rep. 2022, 12, 20409. [Google Scholar] [CrossRef]
- El-Bahay, M.H.; Lotfy, M.E.; El-Hameed, M.A. Effective participation of wind turbines in frequency control of a two-area power system using coot optimization. Prot. Control Mod. Power Syst. 2023, 8, 14. [Google Scholar] [CrossRef]
- Sarath, P.S.K.; Monica, I.S. Application of BFOA in Two Area Load Frequency Control. Int. J. Eng. Technol. (UAE) 2018, 7, 50–54. [Google Scholar]
- Satheeshkumar, R.; Phd, S. Ant Lion Optimization Approach for Load Frequency Control of Multi-Area Interconnected Power Systems. Circuits Syst. 2016, 7, 2357–2383. [Google Scholar] [CrossRef]
- Mahmoud, G.; Chen, Y.; Zhang, L.; Li, M. Sliding Mode Based Nonlinear Load Frequency Control for Interconnected Coupling Power Network. Int. J. Control. Autom. Syst. 2022, 20, 3731–3739. [Google Scholar] [CrossRef]
- Kumar, A.; Anwar, N.; Kumar, S. Sliding mode controller design for frequency regulation in an interconnected power system. Prot. Control Mod. Power Syst. 2021, 6, 6. [Google Scholar] [CrossRef]
- Tran, A.-T.; Duong, M.P.; Pham, N.T.; Shim, J.W. Enhanced sliding mode controller design via meta-heuristic algorithm for robust and stable load frequency control in multi-area power systems. IET Gener. Transm. Distrib. 2024, 18, 460–478. [Google Scholar] [CrossRef]
- Nair, A.S.; Ezhilarasi, D. Performance Analysis of Super Twisting Sliding Mode Controller by ADAMS–MATLAB Co-simulation in Lower Extremity Exoskeleton. Int. J. Precis. Eng. Manuf.-Green Technol. 2020, 7, 743–754. [Google Scholar] [CrossRef]
- Abdelaal, A.K.; Mohamed, E.F.; El-Fergany, A.A. Optimal Scheduling of Hybrid Sustainable Energy Microgrid: A Case Study for a Resort in Sokhna, Egypt. Sustainability 2022, 14, 12948. [Google Scholar] [CrossRef]
- Abdelaal, A.K.; El-Fergany, A. Estimation of optimal tilt angles for photovoltaic panels in Egypt with experimental verifications. Sci. Rep. 2023, 13, 3268. [Google Scholar] [CrossRef]
- Abdelaal, A.K.; Alhamahmy, A.I.; Attia HE, D.; El-Fergany, A.A. Maximizing solar radiations of PV panels using artificial gorilla troops reinforced by experimental investigations. Sci. Rep. 2024, 14, 3562. [Google Scholar] [CrossRef]
- Fayek, H.H. Load Frequency Control of a Power System with 100% Renewables. In Proceedings of the 2019 54th International Universities Power Engineering Conference (UPEC), Bucharest, Romania, 3–6 September 2019. [Google Scholar]
- Lee, D.-J.; Wang, L. Small-Signal Stability Analysis of an Autonomous Hybrid Renewable Energy Power Generation/Energy Storage System Part I: Time-Domain Simulations. IEEE Trans. Energy Convers. 2008, 23, 311–320. [Google Scholar] [CrossRef]
- Ray, P.K.; Mohanty, S.R.; Kishor, N. Proportional–integral controller based small-signal analysis of hybrid distributed generation systems. Energy Convers. Manag. 2011, 52, 1943–1954. [Google Scholar] [CrossRef]
- Nanda, J.; Sharma, D.; Mishra, S. Performance analysis of automatic generation control of interconnected power systems with delayed mode operation of area control error. J. Eng. 2015, 2015, 164–173. [Google Scholar] [CrossRef]
- Kalyani, S.; Nagalakshmi, S.; Marisha, R. Load frequency control using battery energy storage system in interconnected power system. In Proceedings of the 2012 Third International Conference on Computing, Communication and Networking Technologies (ICCCNT’12), Coimbatore, India, 26–28 July 2012. [Google Scholar]
- Regad, M.; Helaimi, M.; Taleb, R.; Gabbar, H.A.; Othman, A.M. Fractional Order PID Control of Hybrid Power System with Renewable Generation Using Genetic Algorithm. In Proceedings of the 2019 IEEE 7th International Conference on Smart Energy Grid Engineering (SEGE), Oshawa, ON, Canada, 12–14 August 2019. [Google Scholar]
- Das, D.; Roy, A.K.; Sinha, N. Genetic Algorithm Based PI Controller for Frequency Control of an Autonomous Hybrid Generation System. In Proceedings of the international Multi Conference of Engineers and Computer Scientists IMECS 2011, Hong Kong, China, 16–18 March 2011; Volume 2. [Google Scholar]
- Amiri, M.H.; Hashjin, N.M.; Montazeri, M.; Mirjalili, S.; Khodadadi, N. Hippopotamus Optimization Algorithm: A Novel Nature-Inspired Optimization Algorithm. Sci. Rep. 2023, 14, 5032. [Google Scholar] [CrossRef]
- Dehghani, M.; Trojovská, E.; Trojovský, P.; Malik, O.P. OOBO: A New Metaheuristic Algorithm for Solving Optimization Problems. Biomimetics 2023, 8, 468. [Google Scholar] [CrossRef] [PubMed]
- Sahu, R.K.; Gorripotu, T.S.; Panda, S. Automatic generation control of multi-area power systems with diverse energy sources using Teaching Learning Based Optimization algorithm. Eng. Sci. Technol. Int. J. 2016, 19, 113–134. [Google Scholar] [CrossRef]
- Poznyak, A.S.; Orlov, Y.V.; Vadim, I. Utkin and sliding mode control. J. Frankl. Inst. 2023, 360, 12892–12921. [Google Scholar] [CrossRef]
- Gambhire, S.J.; Kishore, D.R.; Londhe, P.S.; Pawar, S.N. Review of sliding mode based control techniques for control system applications. Int. J. Dyn. Control 2021, 9, 363–378. [Google Scholar] [CrossRef]
- Komurcugil, H.; Biricik, S.; Bayhan, S.; Zhang, Z. Sliding Mode Control: Overview of Its Applications in Power Converters. IEEE Ind. Electron. Mag. 2021, 15, 40–49. [Google Scholar] [CrossRef]
- Dong, C.S.T.; Nguyen, Q.T.; Nguyen, D.Q.; Vo, H.H.; Tran, T.C.; Brandstetter, P. PMSM Drive with Sliding Mode Direct Torque Control. In AETA 2022—Recent Advances in Electrical Engineering and Related Sciences: Theory and Application; Springer Nature: Singapore, 2024. [Google Scholar]
- Utkin, V.; Lee, H. Chattering Problem in Sliding Mode Control Systems. In Proceedings of the International Workshop on Variable Structure Systems, 2006, VSS’06, Alghero, Italy, 5–7 June 2006. [Google Scholar]
- Saadat, H. Power System Analysis, 3rd ed.; PSA Publishing LLC: Williamsport, PA, USA, 2011. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plant Type | Parameters | Plant Type | Parameters |
|---|---|---|---|
| Solar Thermal | τS-TH = 1.8 s | Power system | H1 = H2 = 3 s |
| KS-TH = 1.8 | D1 = D2 = 1 | ||
| KG-STH = KT-STH = 1 | R1 = R2 = 0.05 pu | ||
| τT-STH = 0.3 s | BESS | KB = −0.003 | |
| PV | KPV = 1 | TB = 0.1 s | |
| TPV = 1.8 s | Wind Turbine | KWT = 1 | |
| TWT = 1.5 s |
| Controller | Area 1 | Area 2 | ||
|---|---|---|---|---|
| KP1 (or c1) | KI1 (or b1) | KP2 (or c2) | KI2 (or b2) | |
| OBOO | 0.4658 | 0.6468 | 1.2780 | 0 |
| HO | 0.4365 | 0.6465 | 1.0949 | 0.0820 |
| ST | 3.8341 | 31.1777 | 1.8890 | 0.3802 |
| Optimizer | Area One | Area Two | OF Value |
|---|---|---|---|
| HO | KP = 3.2998 KI = 6.2767 | KP = 0.2770 KI = 0 | 3.8260 × 10−5 |
| OOBO | KP = 3.6424 KI = 5.7919 | KP = 0.0240 KI = 3.467 × 10−4 | 1.05 × 10−5 |
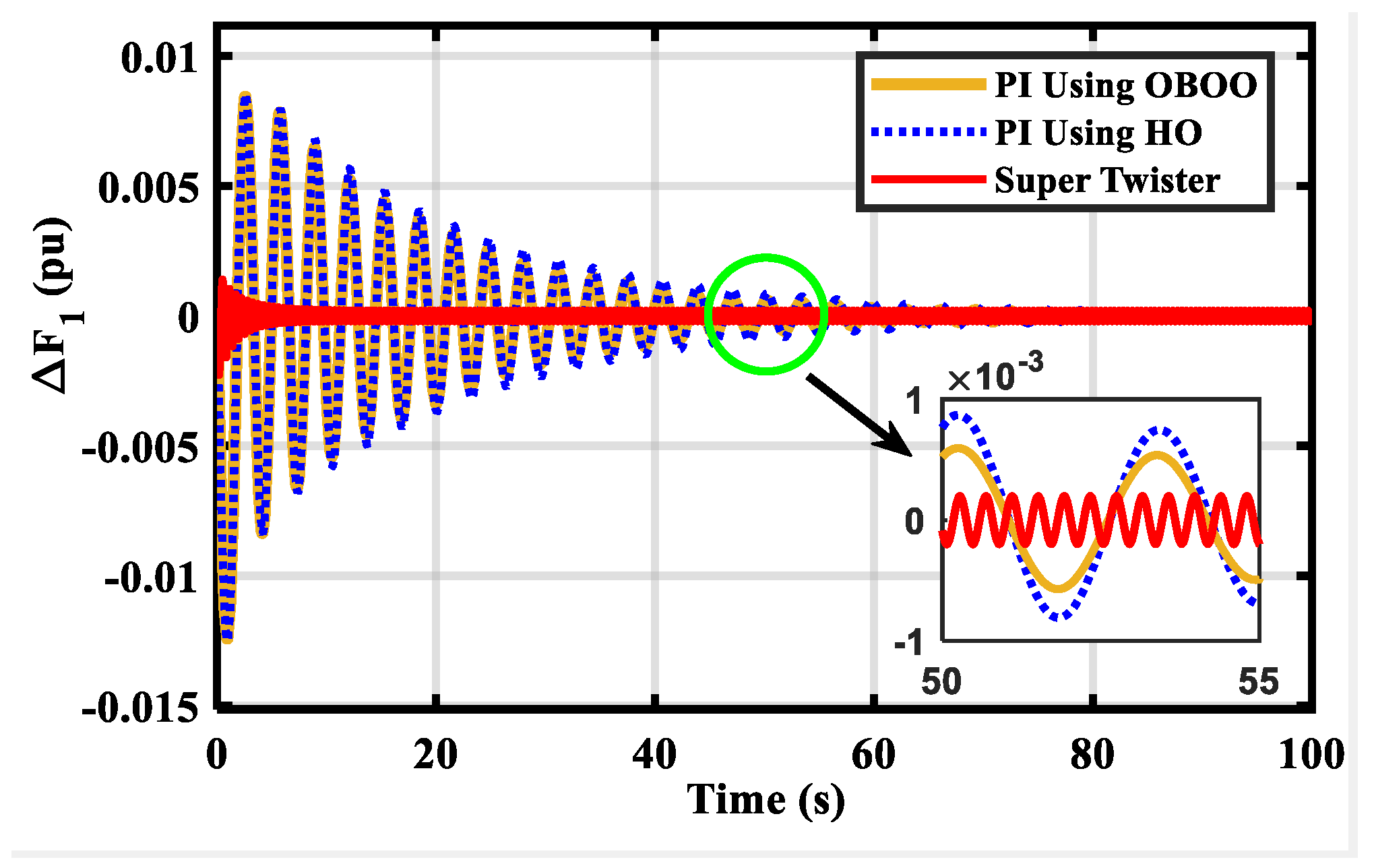
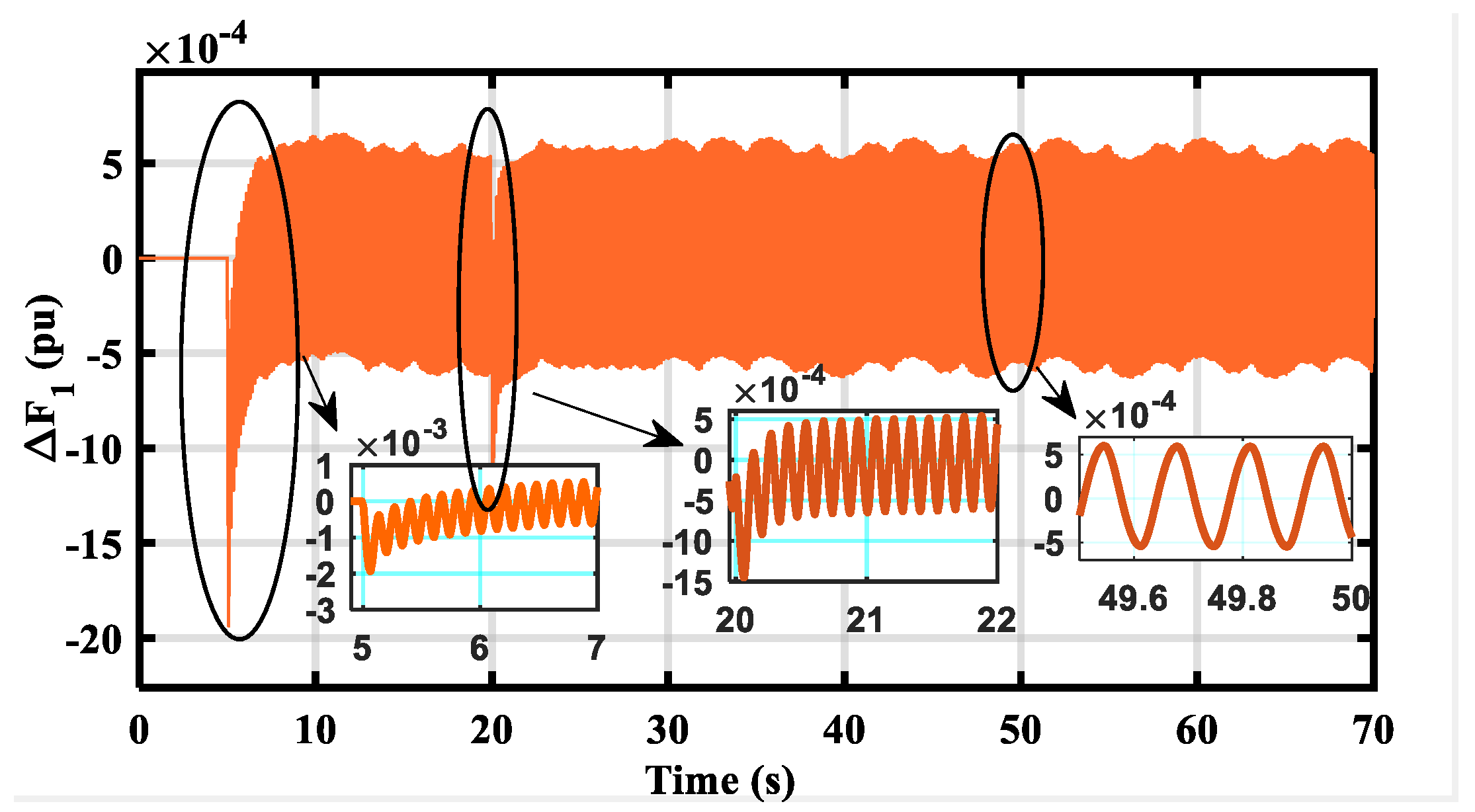
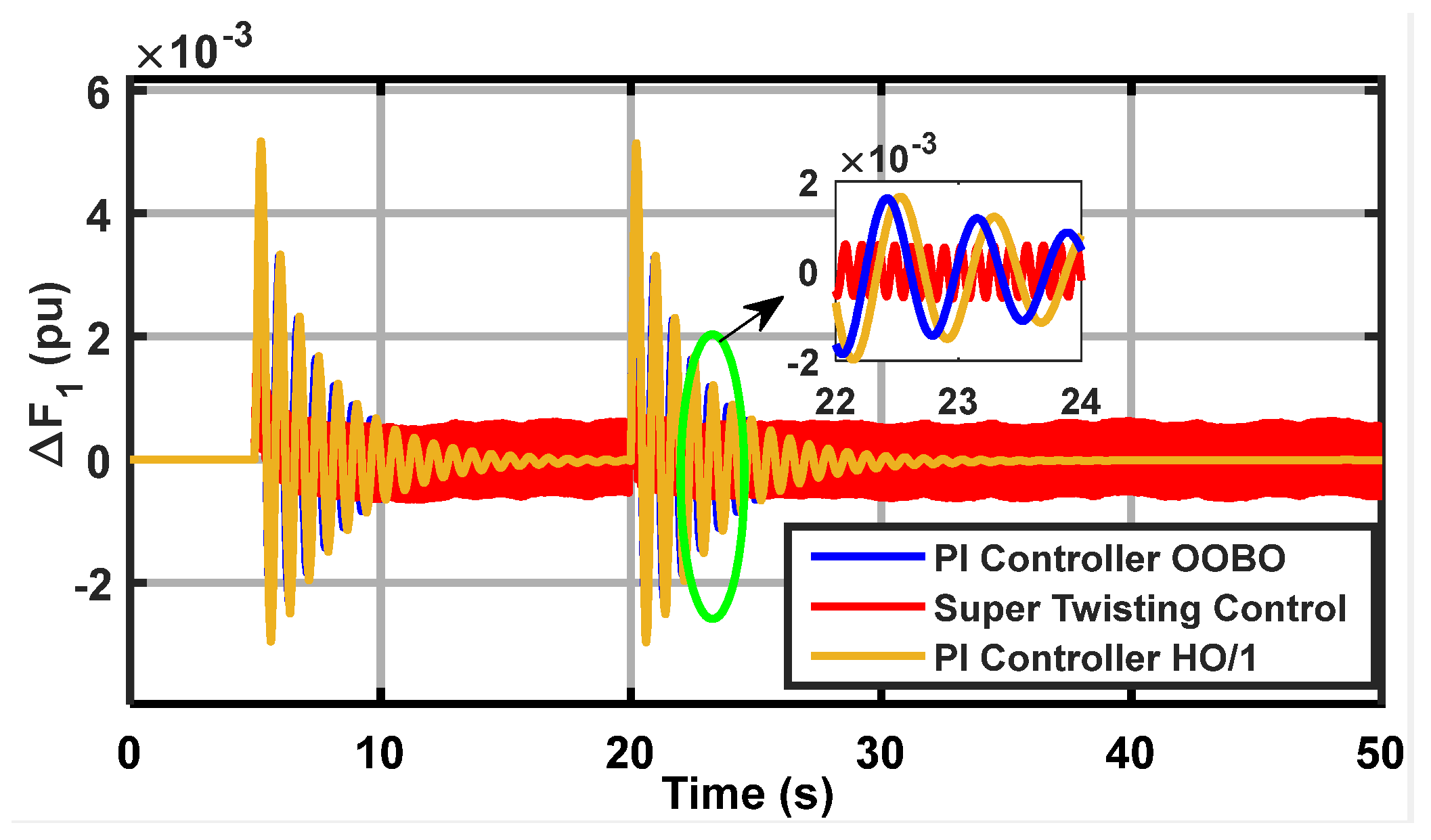
| Optimizer | Area One (∆F1 pu) | Area Two (∆F2 pu) |
|---|---|---|
| HO | OS = −2.96 × 10−3 Ts = 19.5 s | OS = −1.422 × 10−3 Ts = 19.5 s |
| OOBO | OS = −2.6 × 10−3 Ts = 19.95 s | OS = −1.425 × 10−3 Ts = 19.95 s |
| ST | OS = −1.88 × 10−3 Ts = 6.6 s | OS = −2.48 × 10−5 Ts = 6.6 s |
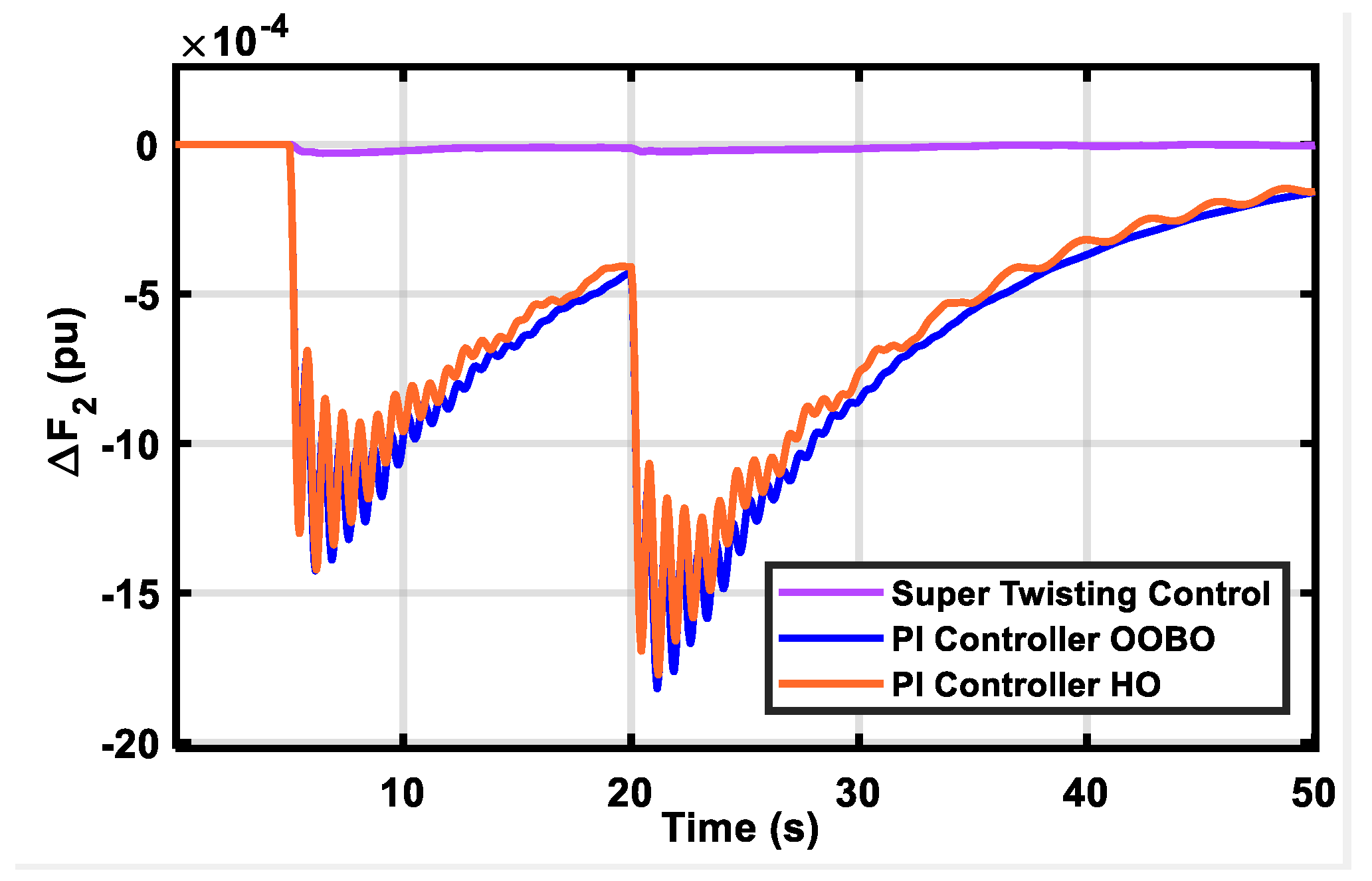
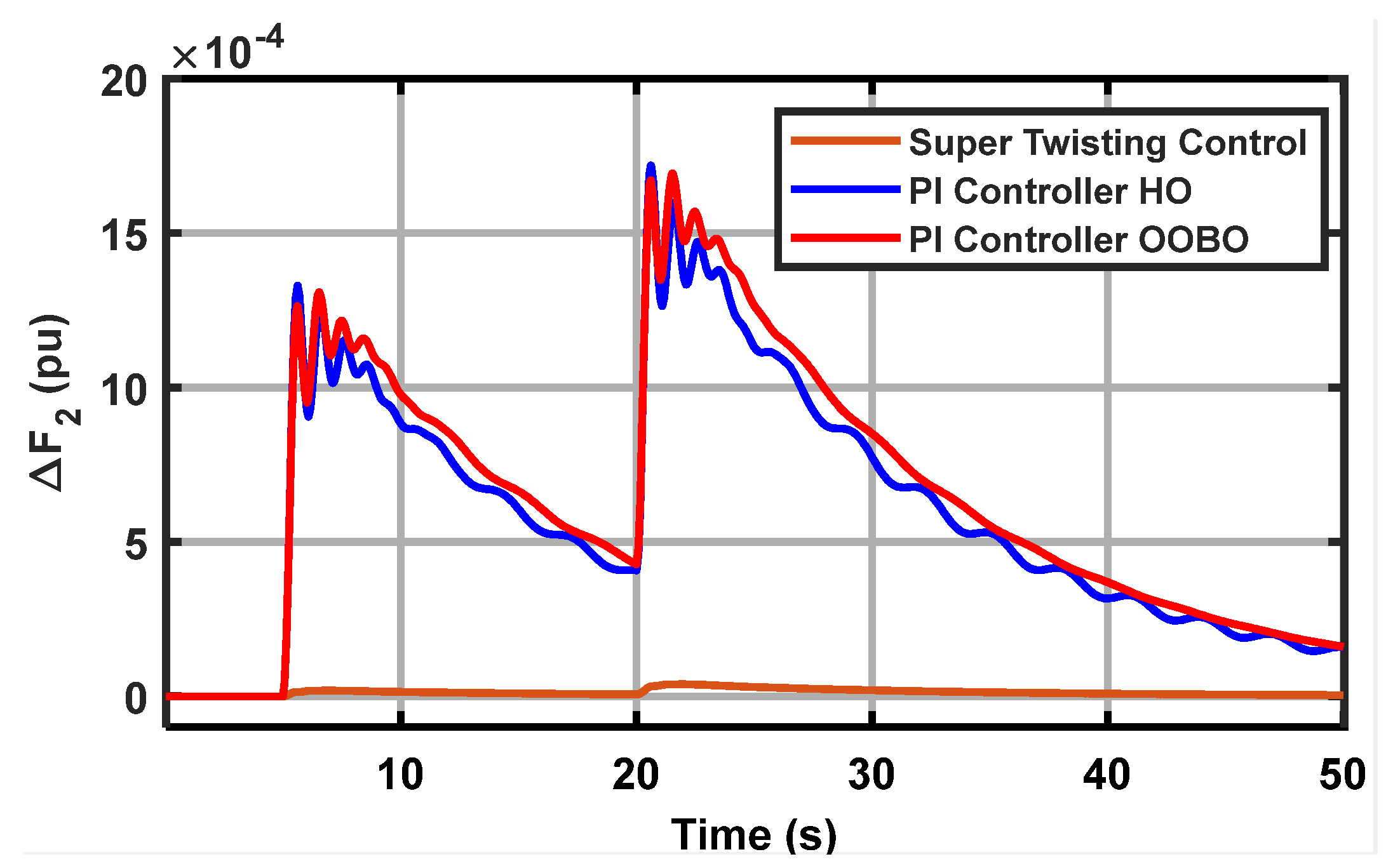
| Optimizer | Area One (∆F1 pu) | Area Two (∆F2 pu) |
|---|---|---|
| HO | OS = −2.96 × 10−3 Ts = 19.5 s | OS = 1.33 × 10−3 Ts = 19.2 s |
| OOBO | OS = −2.6 × 10−3 Ts = 19.95 s | OS = 1.2635 × 10−3 Ts = 20 s |
| ST | OS = −1.88 × 10−3 Ts = 6.6 s | OS = 1.8 × 10−5 Ts = 5.1 s |
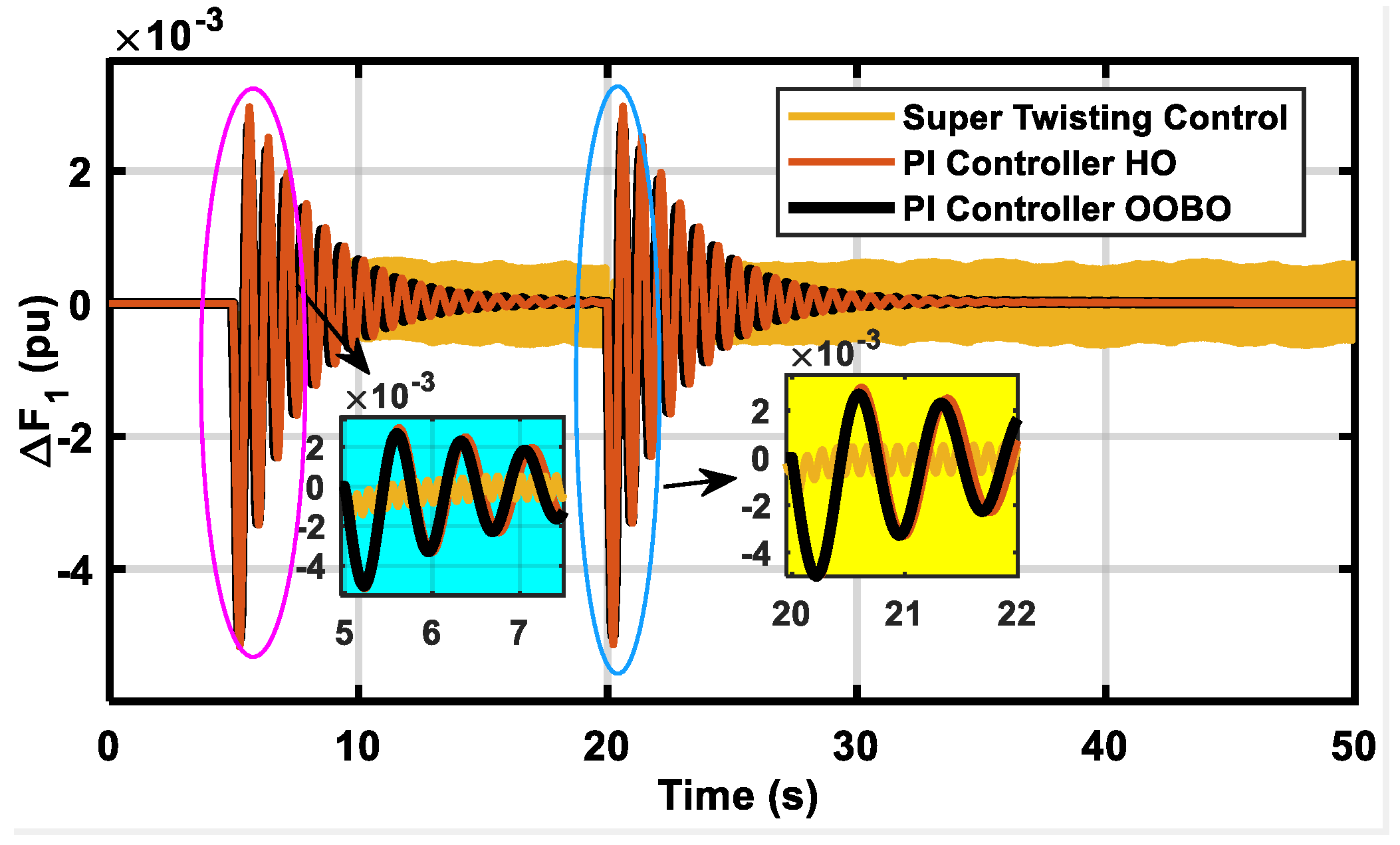
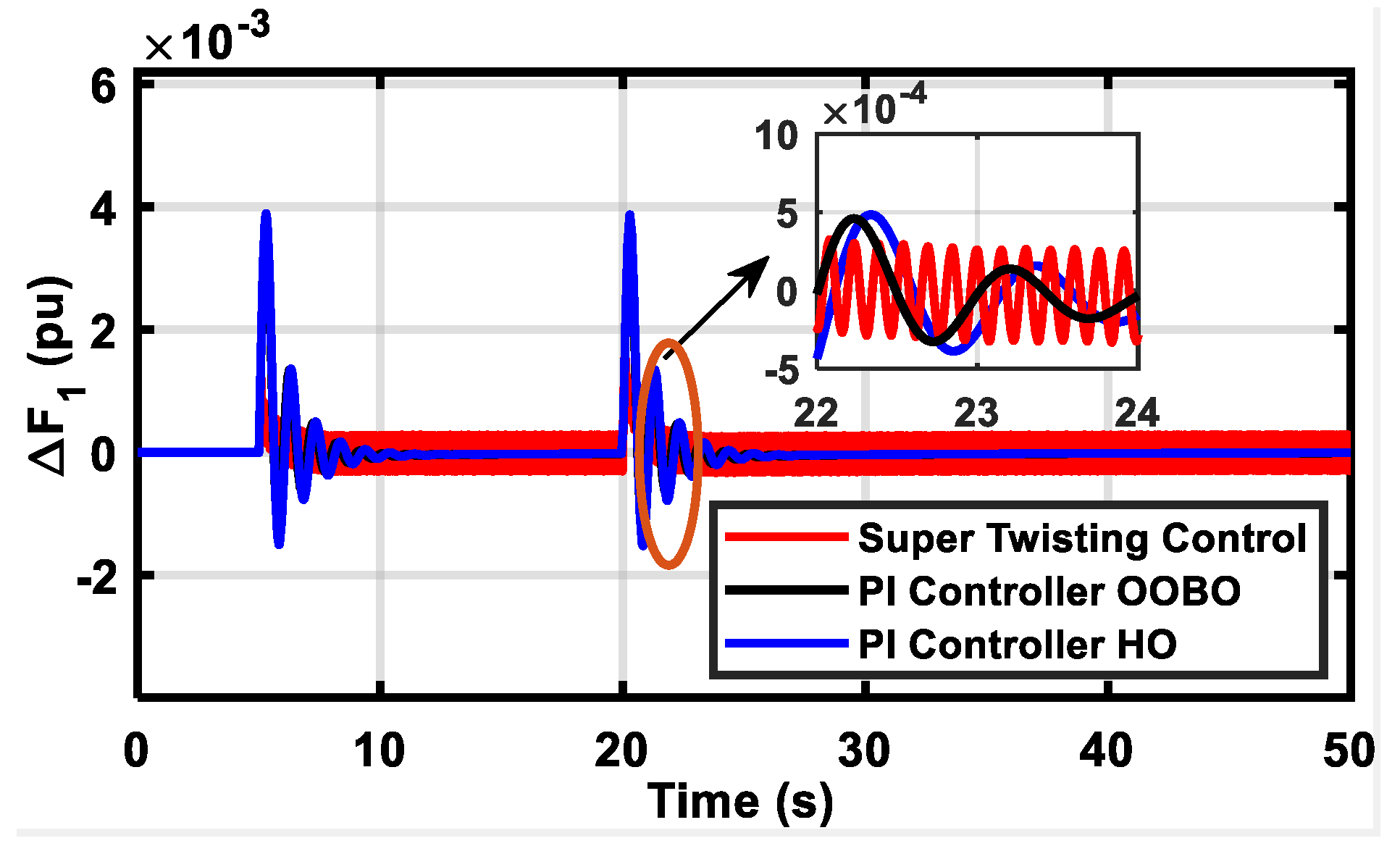
| Optimizer | Area One (∆F1 pu) | Area Two (∆F2 pu) |
|---|---|---|
| HO | OS = 3.9 × 10−3 Ts = 11.4 s | OS = 1.332 × 10−3 Ts = 19.2 s |
| OOBO | OS = 3.77 × 10−3 Ts = 11.8 s | OS = 1.31 × 10−3 Ts = 20 s |
| ST | OS = 1.23 × 10−3 Ts = 6.2 s | OS = 5.5 × 10−5 Ts = 5.5 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdelaal, A.K.; El-Hameed, M.A. Application of Robust Super Twisting to Load Frequency Control of a Two-Area System Comprising Renewable Energy Resources. Sustainability 2024, 16, 5558. https://doi.org/10.3390/su16135558
Abdelaal AK, El-Hameed MA. Application of Robust Super Twisting to Load Frequency Control of a Two-Area System Comprising Renewable Energy Resources. Sustainability. 2024; 16(13):5558. https://doi.org/10.3390/su16135558
Chicago/Turabian StyleAbdelaal, Ashraf K., and Mohamed A. El-Hameed. 2024. "Application of Robust Super Twisting to Load Frequency Control of a Two-Area System Comprising Renewable Energy Resources" Sustainability 16, no. 13: 5558. https://doi.org/10.3390/su16135558