

Consumer Theory-Based Primary Frequency Regulation in Multi-Microgrid Systems within a P2P Energy Management Framework


Abstract
:1. Introduction
- Proposal of a primary regulation alternative that allows a coordinated response among agents within the framework of a P2P market, enhancing energy efficiency, and maximizing renewable energy utilization.
- Modeling of storage and PV systems using consumer theory.
- Adaptation of the EMS based on the P2P market scheme proposed in [26] to MMG systems.
2. Background
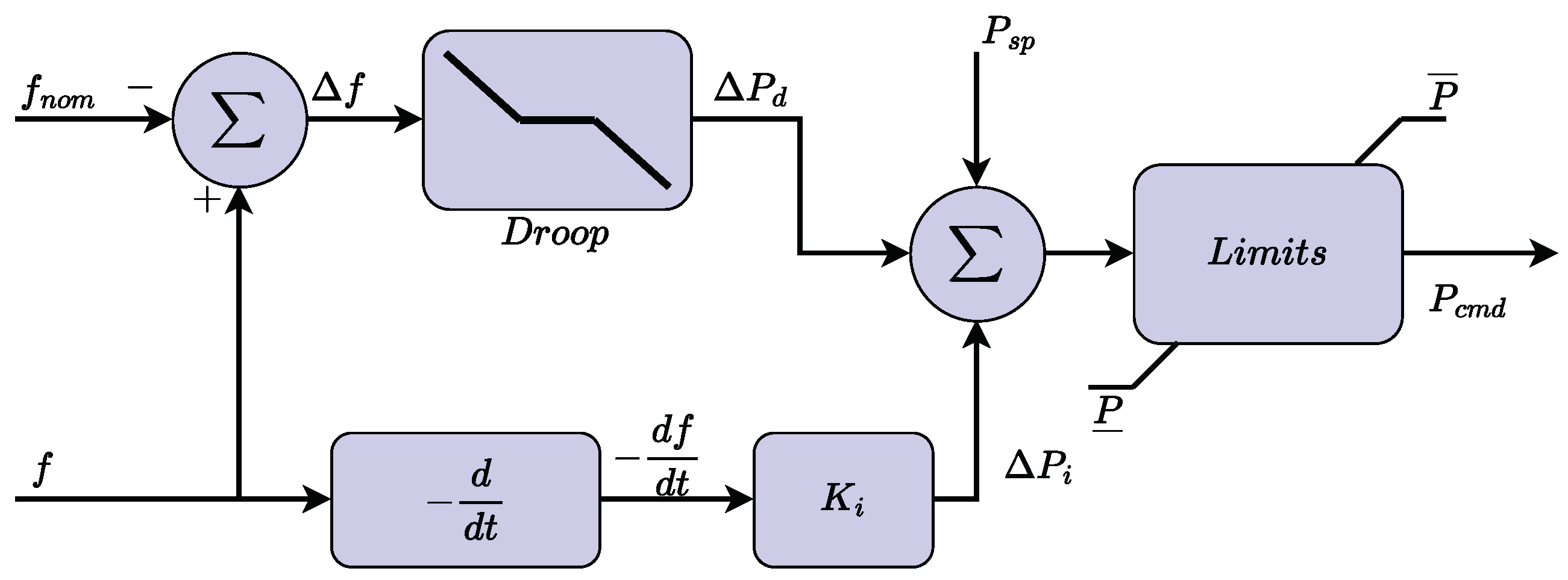
2.1. Droop Control for Primary Frequency Regulation
2.2. Virtual Inertia in Primary Frequency Regulation
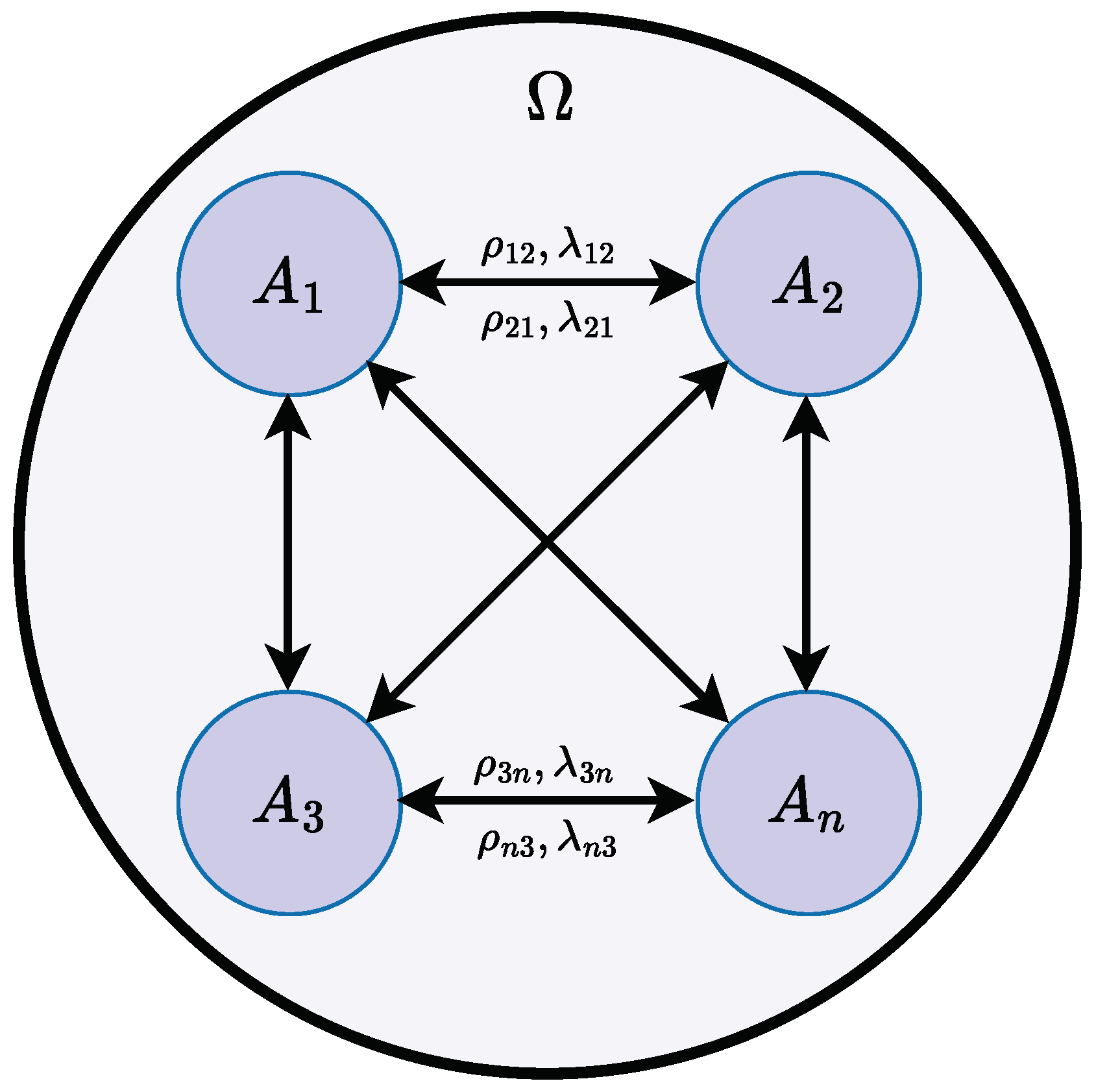
2.3. Consensus Equation
2.4. P2P Market Scheme
2.5. Consensus + Innovation Algorithm
2.5.1. Dual Variables Update
2.5.2. Primal Variables Update
2.5.3. Convergence Criteria Evaluation
2.6. Consumer Theory
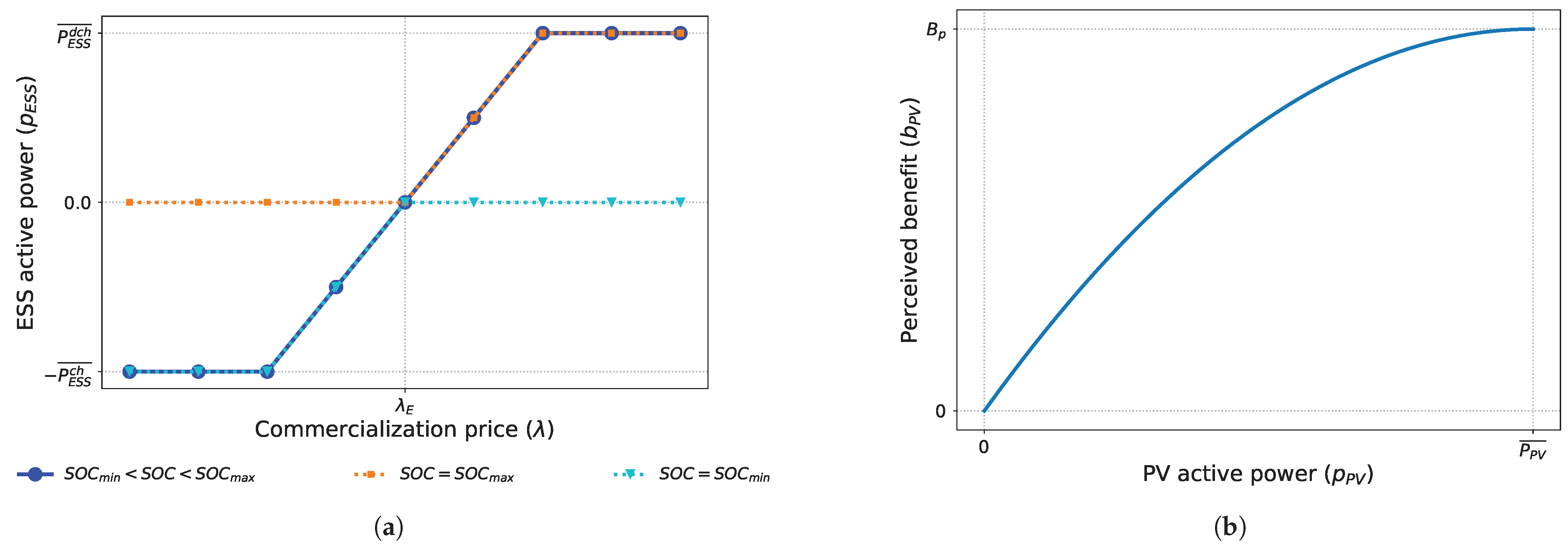
3. Modeling ESS and PV Based on Consumer Theory
3.1. ESS Modeling
3.2. PV Systems Modeling
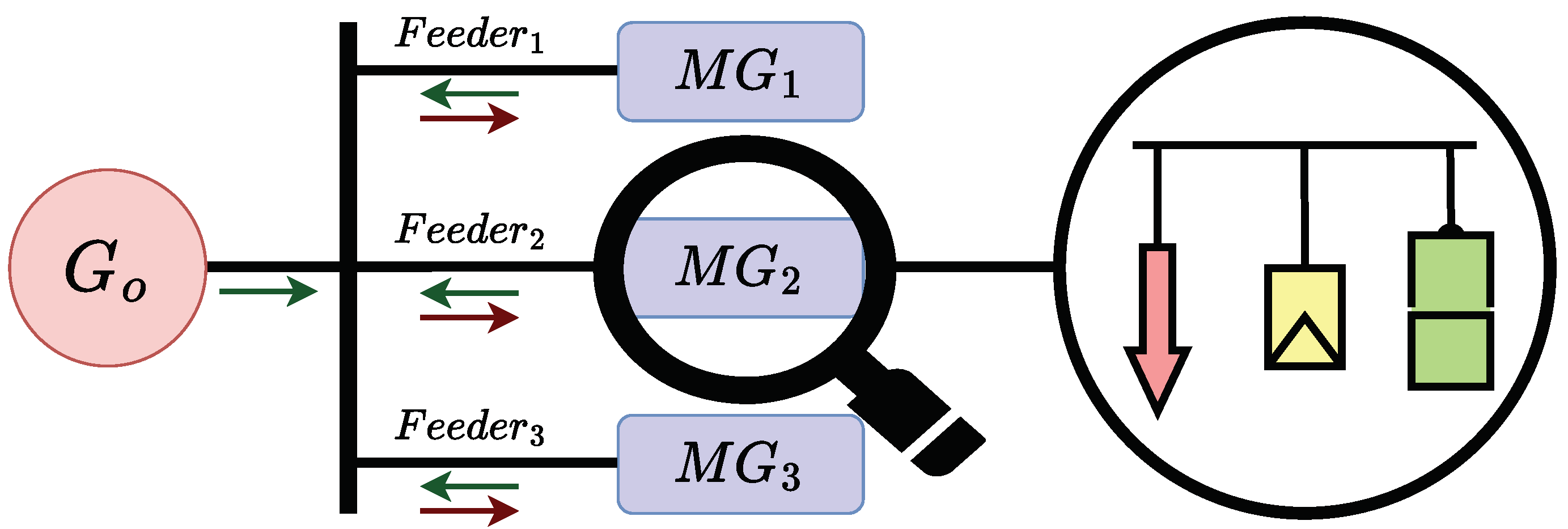
4. EMS Based on the P2P Market for MMG
4.1. MG Modeling
4.2. MG Integration into P2P Market
5. Proposed Strategy for Primary Frequency Regulation
5.1. Primary Frequency Regulation on PV Systems
5.2. Primary Frequency Regulation on ESS
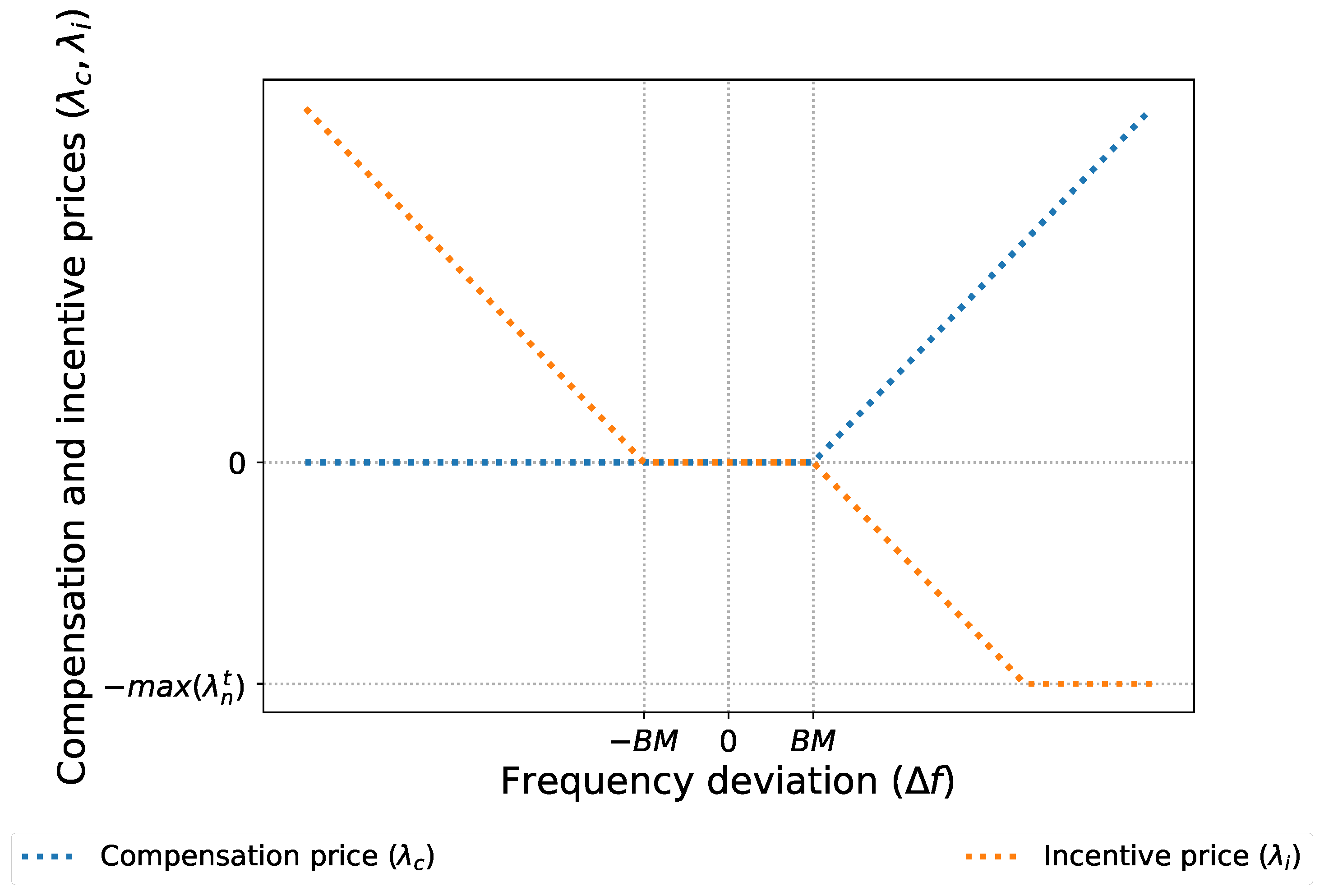
5.3. Determination of Compensation and Incentive Prices
6. Simulations and Results
6.1. Operational Conditions Determination
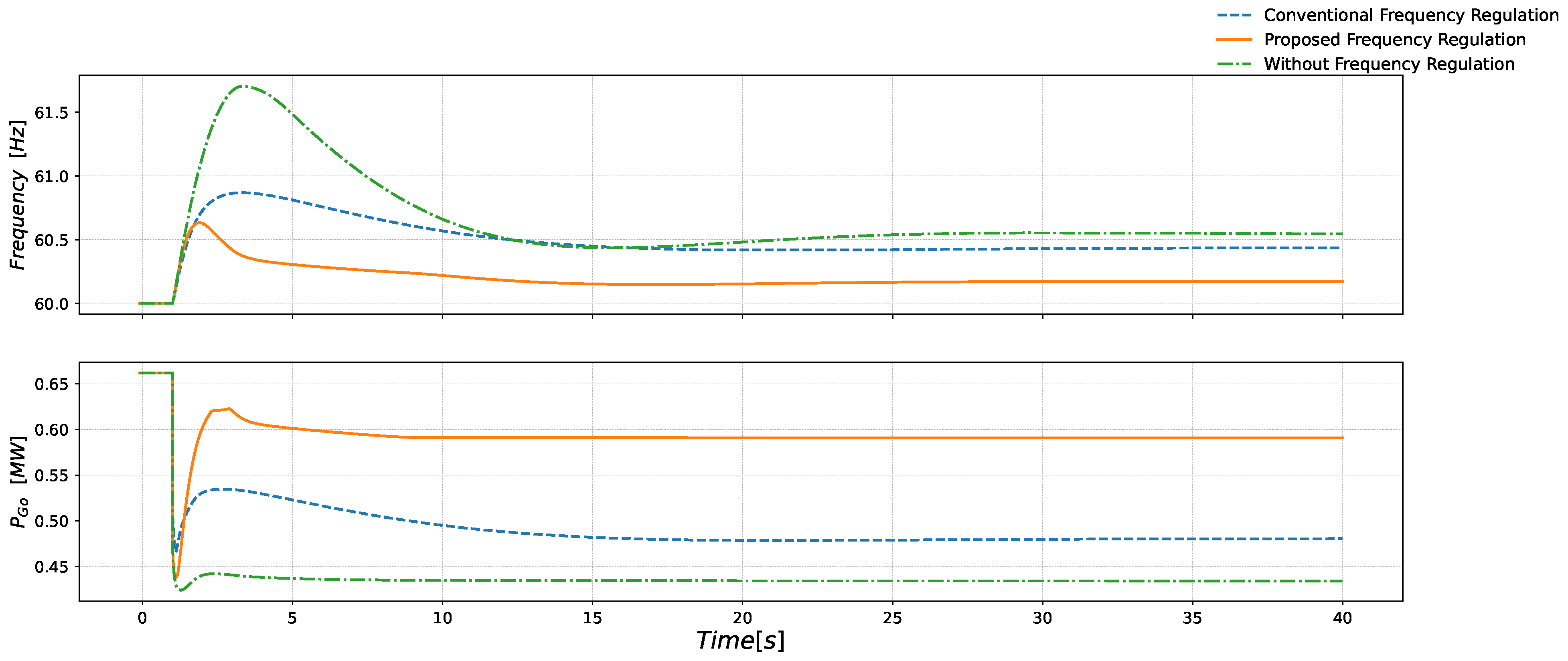
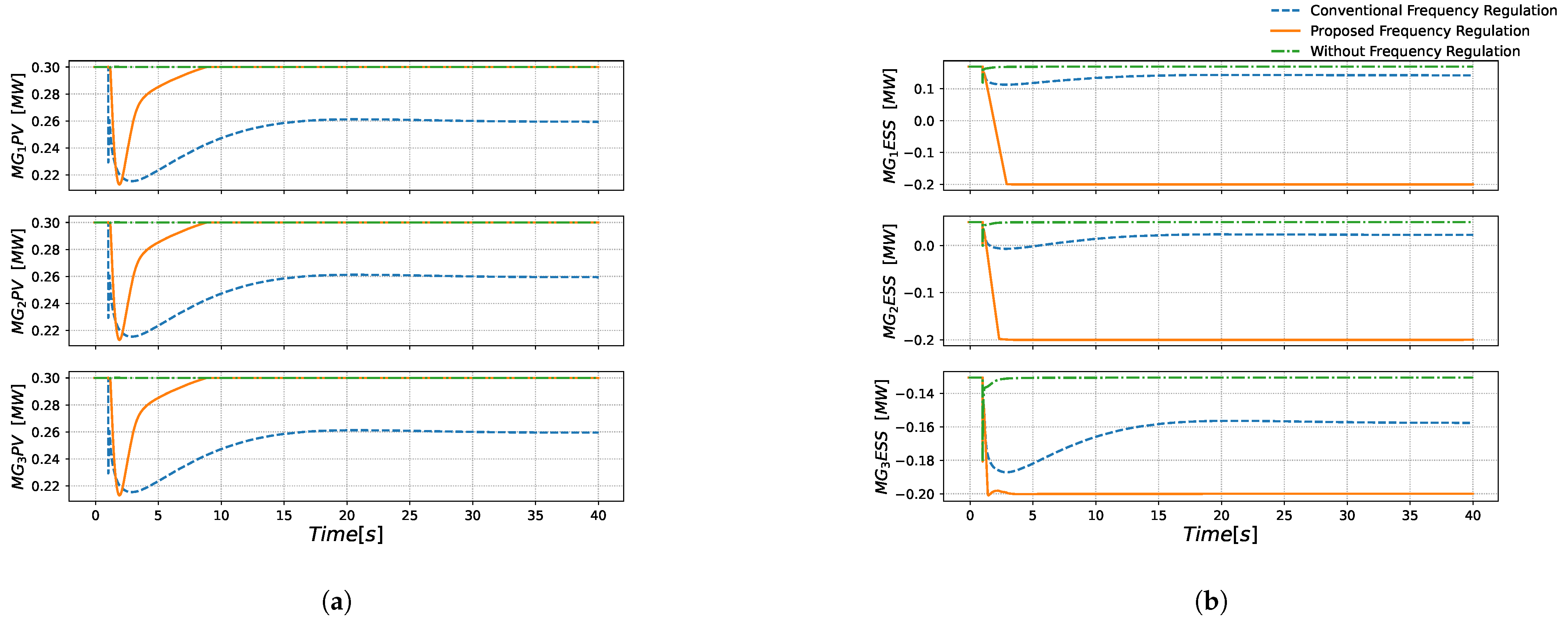
6.2. Analysis of Frequency Regulation Schemes
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Notations

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Explanation |
|---|---|
| Trading price offered by agent n to its neighbor m | |
| Power traded between agent n and its neighbor m | |
| Vector of trading prices for agent n | |
| Vector of power trades for agent n | |
| Potential power exchange for agent n with neighbor m at iteration k, assuming no other neighbors influence the decision | |
| Frequency deviation from nominal frequency | |
| Droop slope coefficient | |
| Dead band for frequency deviation | |
| Simulated inertia constant | |
| Proportionality constant for virtual inertia | |
| Active power setpoint | |
| Commanded active power for primary frequency regulation | |
| Maximum charge power rate of ESS | |
| Maximum discharge power rate of ESS | |
| SOC | State of charge of ESS |
| Valuation of stored energy in ESS | |
| Elasticity of ESS | |
| Power of ESS as a function of trading price | |
| Power of PV system as a function of trading price | |
| Coefficient related to diminishing marginal benefit for PV | |
| Coefficient related to perceived benefit of generating power with PV | |
| Maximum power of PV system | |
| Perceived benefit of generating maximum power with PV | |
| Set of all agents | |
| Set of neighboring agents of agent n | |
| Subset of containing consumers | |
| Subset of containing generators | |
| Subset of containing microgrids | |
| Dual slack variable for upper power boundary constraint | |
| Dual slack variable for lower power boundary constraint | |
| Minimum power for n at iteration k | |
| Maximum power for n at iteration k | |
| Weighting factor in consensus + innovation algorithm | |
| Small positive constant to avoid division by zero | |
| Sequence of positive values used in slack variable updates | |
| Sequence of positive values representing weight of consensus factor | |
| Sequence of positive values representing weight of innovation factor | |
| Proportionality factor for proposed frequency control characteristic | |
| Compensation price for curtailment of PV generation | |
| Incentive price for ESS frequency regulation |
References
- Kwasinski, A.; Weaver, W.; Balog, R.S. Microgrids and Other Local Area Power and Energy Systems; Cambridge University Press: Cambridge, UK, 2016; pp. 1–434. [Google Scholar] [CrossRef]
- Parhizi, S.; Lotfi, H.; Khodaei, A.; Bahramirad, S. State of the art in research on microgrids: A review. IEEE Access 2015, 3, 890–925. [Google Scholar] [CrossRef]
- Villanueva-Rosario, J.A.; Santos-García, F.; Aybar-Mejía, M.E.; Mendoza-Araya, P.; Molina-García, A. Coordinated ancillary services, market participation and communication of multi-microgrids: A review. Appl. Energy 2022, 308, 118332. [Google Scholar] [CrossRef]
- Milano, F.; Dörfler, F.; Hug, G.; Hill, D.J.; Verbič, G. Foundations and Challenges of Low-Inertia Systems (Invited Paper). In Proceedings of the 2018 Power Systems Computation Conference (PSCC), Dublin, Ireland, 11–15 June 2018; pp. 1–25. [Google Scholar] [CrossRef]
- Qiu, W.; Yang, Q.; Yang, T.; Ma, X.; Xiao, X.; Shi, H.; Zhao, Y.; Shi, Q.; Liang, S. Frequency Characteristics Analysis of Isolated Power Grid Based on VSC Droop Controller. In Proceedings of the 2023 International Conference on Power Energy Systems and Applications (ICoPESA), Nanjing, China, 24–26 February 2023; pp. 40–45. [Google Scholar] [CrossRef]
- Bevrani, H.; Golpîra, H.; Messina, A.R.; Hatziargyriou, N.; Milano, F.; Ise, T. Power system frequency control: An updated review of current solutions and new challenges. Electr. Power Syst. Res. 2021, 194, 107114. [Google Scholar] [CrossRef]
- Rajan, R.; Fernandez, F.M.; Yang, Y. Primary frequency control techniques for large-scale PV-integrated power systems: A review. Renew. Sustain. Energy Rev. 2021, 144, 110998. [Google Scholar] [CrossRef]
- Veronica, A.J.; Kumar, N.S. Control strategies for frequency regulation in microgrids: A review. Wind Eng. 2019, 45, 107–122. [Google Scholar] [CrossRef]
- Salehi, N.; Martínez-García, H.; Velasco-Quesada, G.; Guerrero, J.M. A Comprehensive Review of Control Strategies and Optimization Methods for Individual and Community Microgrids. IEEE Access 2022, 10, 15935–15955. [Google Scholar] [CrossRef]
- Spiegel, M.H.; Veith, E.M.S.P.; Strasser, T.I. The Spectrum of Proactive, Resilient Multi-Microgrid Scheduling: A Systematic Literature Review. Energies 2020, 13, 4543. [Google Scholar] [CrossRef]
- Baron-Prada, E.; Mojica-Nava, E. A population games transactive control for distributed energy resources. Int. J. Electr. Power Energy Syst. 2021, 130, 106874. [Google Scholar] [CrossRef]
- Rahbari-Asr, N.; Ojha, U.; Zhang, Z.; Chow, M.Y. Incremental Welfare Consensus Algorithm for Cooperative Distributed Generation/Demand Response in Smart Grid. IEEE Trans. Smart Grid 2014, 5, 2836–2845. [Google Scholar] [CrossRef]
- Li, Z.; Wu, L.; Xu, Y.; Wang, L.; Yang, N. Distributed tri-layer risk-averse stochastic game approach for energy trading among multi-energy microgrids. Appl. Energy 2023, 331, 120282. [Google Scholar] [CrossRef]
- Xin, H.; Liu, Y.; Wang, Z.; Gan, D.; Yang, T. A new frequency regulation strategy for photovoltaic systems without energy storage. IEEE Trans. Sustain. Energy 2013, 4, 985–993. [Google Scholar] [CrossRef]
- Macana, C.A.; Mojica-Nava, E.; Pota, H.R.; Guerrero, J.; Vasquez, J.C. A distributed real-time energy management system for inverter-based microgrids. Electr. Power Syst. Res. 2022, 213, 108753. [Google Scholar] [CrossRef]
- Arani, A.A.K.; Gharehpetian, G.B.; Abedi, M. Decentralised primary and secondary control strategies for islanded microgrids considering energy storage systems characteristics. IET Gener. Transm. Distrib. 2019, 13, 2986–2992. [Google Scholar] [CrossRef]
- de Azevedo, R.; Cintuglu, M.H.; Ma, T.; Mohammed, O.A. Multiagent-Based Optimal Microgrid Control Using Fully Distributed Diffusion Strategy. IEEE Trans. Smart Grid 2017, 8, 1997–2008. [Google Scholar] [CrossRef]
- Lu, J.; Hu, J.; Yu, J.; Cao, J. A dynamic demand response control strategy for isolated microgrid with primary frequency regulation. Electr. Power Syst. Res. 2023, 224, 109691. [Google Scholar] [CrossRef]
- Gouveia, C.; Moreira, J.; Moreira, C.L.; Lopes, J.A.P. Coordinating storage and demand response for microgrid emergency operation. IEEE Trans. Smart Grid 2013, 4, 1898–1908. [Google Scholar] [CrossRef]
- Etxegarai, A.; Eguia, P.; Torres, E.; Buigues, G.; Iturregi, A. Evaluation of short-term frequency control in isolated power grids with increasing penetration of renewable energy sources. In Proceedings of the 2016 IEEE PES PowerAfrica, Livingstone, Zambia, 28 June–3 July 2016; pp. 213–217. [Google Scholar] [CrossRef]
- Teawnarong, A.; Chirapongsananurak, P. Providing Frequency Response in Isolated Microgrids Using Battery Energy Storage Systems. In Proceedings of the 2020 8th International Electrical Engineering Congress (iEECON), Chiang Mai, Thailand, 4–6 March 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Dinkhah, S.; Salazar Cuellar, J.; Khanbaghi, M. Optimal Power and Frequency Control of Microgrid Cluster With Mixed Loads. IEEE Open Access J. Power Energy 2022, 9, 143–150. [Google Scholar] [CrossRef]
- Golpîra, H.; Messina, A.R.; Bevrani, H. Emulation of Virtual Inertia to Accommodate Higher Penetration Levels of Distributed Generation in Power Grids. IEEE Trans. Power Syst. 2019, 34, 3384–3394. [Google Scholar] [CrossRef]
- D’Arco, S.; Suul, J.A.; Fosso, O.B. A Virtual Synchronous Machine implementation for distributed control of power converters in SmartGrids. Electr. Power Syst. Res. 2015, 122, 180–197. [Google Scholar] [CrossRef]
- Zhong, C.; Zhou, Y.; Yan, G. Power reserve control with real-time iterative estimation for PV system participation in frequency regulation. Int. J. Electr. Power Energy Syst. 2021, 124, 106367. [Google Scholar] [CrossRef]
- Sorin, E.; Bobo, L.; Pinson, P. Consensus-Based Approach to Peer-to-Peer Electricity Markets With Product Differentiation. IEEE Trans. Power Syst. 2019, 34, 994–1004. [Google Scholar] [CrossRef]
- Levin, J.; Milgrom, P. Consumer Theory. 2004. Available online: https://web.stanford.edu/~jdlevin/Econ%20202/Consumer%20Theory.pdf (accessed on 1 July 2024).
- Krugman, P.R.; Wells, R. Economics, 4th ed.; Worth Publishers: New York, NY, USA, 2015. [Google Scholar]
- Xu, Y.; Li, Z. Distributed Optimal Resource Management Based on the Consensus Algorithm in a Microgrid. IEEE Trans. Ind. Electron. 2015, 62, 2584–2592. [Google Scholar] [CrossRef]
- Shi, W.; Li, N.; Chu, C.C.; Gadh, R. Real-Time Energy Management in Microgrids. IEEE Trans. Smart Grid 2017, 8, 228–238. [Google Scholar] [CrossRef]
- Hatziargyriou, N. Microgrids: Architectures and Control, 1st ed.; John Wiley and Sons Ltd.: Chichester, UK, 2014; pp. 1–341. [Google Scholar]
- Afrakhte, H.; Bayat, P. A contingency based energy management strategy for multi-microgrids considering battery energy storage systems and electric vehicles. J. Energy Storage 2020, 27, 101087. [Google Scholar] [CrossRef]
- Spescha, F.; Koehler, F. CIGRE Session 2022 Guide on the Assessment, Specification and Design of Synchronous Condenser for Power System with Predominance of Low or Zero Inertia Generators A1/C4 WG, JWG66. 2022. Available online: https://www.e-cigre.org/publications/detail/885-guide-on-the-assessment-specification-and-design-of-synchronous-condenser-for-power-system-with-predominance-of-low-or-zero-inertia-generators.html (accessed on 31 July 2024).


| PV | |||||||
|---|---|---|---|---|---|---|---|
| MG | [MW] | [MW] | [$] | BM [Hz] | |||
| 0.0 | 0.3 | 0.3 | 20 | 0.3 | 7 | ||
| 0.0 | 0.3 | 0.3 | 20 | 0.3 | 7 | ||
| 0.0 | 0.3 | 0.3 | 20 | 0.3 | 7 | ||
| ESS | |||||||
| MG | [MW] | [MW] | [$] | [MW/$] | BM [Hz] | ||
| 0.2 | 0.2 | 0.26 | 3 | 20 | 0.3 | 7 | |
| 0.2 | 0.2 | 0.30 | 3 | 20 | 0.3 | 7 | |
| 0.2 | 0.2 | 0.36 | 3 | 20 | 0.3 | 7 | |
| Cost Functions | |||||||
| Agent | [$/MW2] | [$/MW] | [$] | ||||
| 0.04 | 0.2 | 0.0 | |||||
| 0.052 | 0.5 | 0.0 | |||||
| 0.052 | 0.5 | 0.0 | |||||
| 0.052 | 0.5 | 0.0 | |||||
| Agent | [MW] | Total [MW] | [MW] | Total [MW] | [MW] | Total [MW] | |
|---|---|---|---|---|---|---|---|
| PV | 0.3000 | 0.3000 | 0.3000 | ||||
| ESS | 0.03098 | −0.4690 | 0.08903 | −0.6109 | 0.1694 | −0.8305 | |
| LOAD | −0.8000 | −1.0000 | −1.3000 | ||||
| PV | 0.3000 | 0.3000 | 0.3000 | ||||
| ESS | −0.0890 | −0.5890 | −0.0309 | −0.7309 | 0.0494 | −0.9505 | |
| LOAD | −0.8000 | −1.0000 | −1.3000 | ||||
| PV | 0.3000 | 0.3000 | 0.3000 | ||||
| ESS | −0.2000 | −0.6999 | −0.2000 | −0.9000 | −0.1306 | −1.1306 | |
| LOAD | −0.8000 | −1.0000 | −1.3000 | ||||
| 1.7580 | 1.7580 | 2.2419 | 2.2419 | 2.9117 | 2.9117 |
| Time Interval | Total Iterations | Time of Convergence [s] |
|---|---|---|
| 594 | 0.619 | |
| 140 | 0.133 | |
| 127 | 0.176 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martinez-Polo, D.; Romero-Quete, D.; Cortes, C.A. Consumer Theory-Based Primary Frequency Regulation in Multi-Microgrid Systems within a P2P Energy Management Framework. Sustainability 2024, 16, 6655. https://doi.org/10.3390/su16156655
Martinez-Polo D, Romero-Quete D, Cortes CA. Consumer Theory-Based Primary Frequency Regulation in Multi-Microgrid Systems within a P2P Energy Management Framework. Sustainability. 2024; 16(15):6655. https://doi.org/10.3390/su16156655
Chicago/Turabian StyleMartinez-Polo, Dagoberto, David Romero-Quete, and Camilo A. Cortes. 2024. "Consumer Theory-Based Primary Frequency Regulation in Multi-Microgrid Systems within a P2P Energy Management Framework" Sustainability 16, no. 15: 6655. https://doi.org/10.3390/su16156655