
Optimizing Autonomous UAV Navigation with D* Algorithm for Sustainable Development

Abstract
:1. Introduction
1.1. Purpose of the Study
1.2. Problem Statement
1.3. Challenges and Solution Proposal
1.4. Conributions
- Simulation-Based Comparative Analysis with Established Navigation Methods: This paper provides a comprehensive comparative analysis between the D* algorithm and other well-established navigation methods used in UAVs, namely, A* (A-Star), RRT* (Rapidly Exploring Random Trees), and SLAM (Simultaneous Localization and Mapping) [35]. This comparative study specifically elucidates the strengths of the D* algorithm within the context of simulation, particularly in scenarios demanding real-time adjustments and safety-critical missions [36,37].
- Simulation-Driven Evaluation Across Diverse Scenarios and Challenges: To evaluate the algorithm’s practical applicability, this research defines and addresses a diverse set of simulated scenarios and challenges [38]. These include obstacle avoidance, dynamic obstacle interactions, terrain adaptation, weather resilience, and localization challenges. The experimentation framework measures the algorithm’s performance under conditions mirroring real-world complexities, albeit within the controlled environment of simulations.
- Detailed Documentation of Simulation Environments: This paper provides an extensive overview of the simulated test environments used for experimentation, including their size, terrain types, weather conditions, and lighting variations [39]. This contribution ensures transparency in the research methodology within the simulation context and allows for the replication and validation of the results in simulated settings [40,41].
2. Literature Review
2.1. Unmanned Aerial Vehicles (UAVs)
2.2. UAV Navigation Algorithms
2.3. Limitations of Existing Navigation Algorithms
2.4. The D* Algorithm: Origin and Application
2.5. Comparing D* to Other Navigation Algorithms
2.5.1. D* Algorithm
2.5.2. A* Algorithm
2.5.3. RRT* Algorithm
2.6. Path Planning
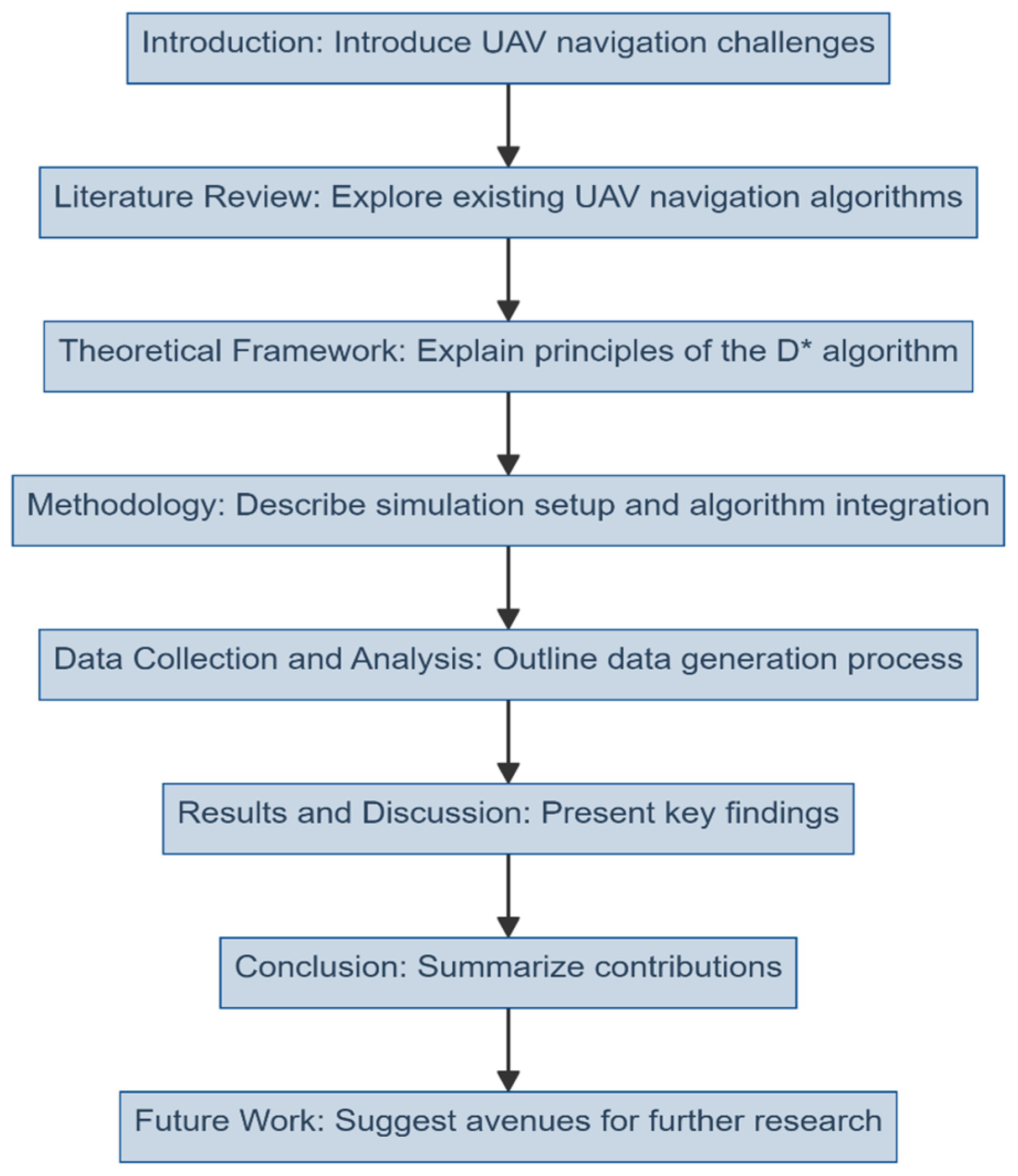
3. Methodology
3.1. Research Framework
3.2. Equations for the D* Algorithm
| Algorithm 1. D* Algorithms |
| Initialization: g(s): The cost from the start point to a specific grid cell or state, ‘s’. g(s) = min_over_all_neighbors(c(s, s’) + g(s’)) rhs(s): The right-hand-side cost value, initially set to infinity, representing an unknown cost. rhs(s) = min_over_all_neighbors(c(s, s’) + g(s’)) Propagation: rhs(s) is updated based on neighboring states and obstacle costs. Replanning: |
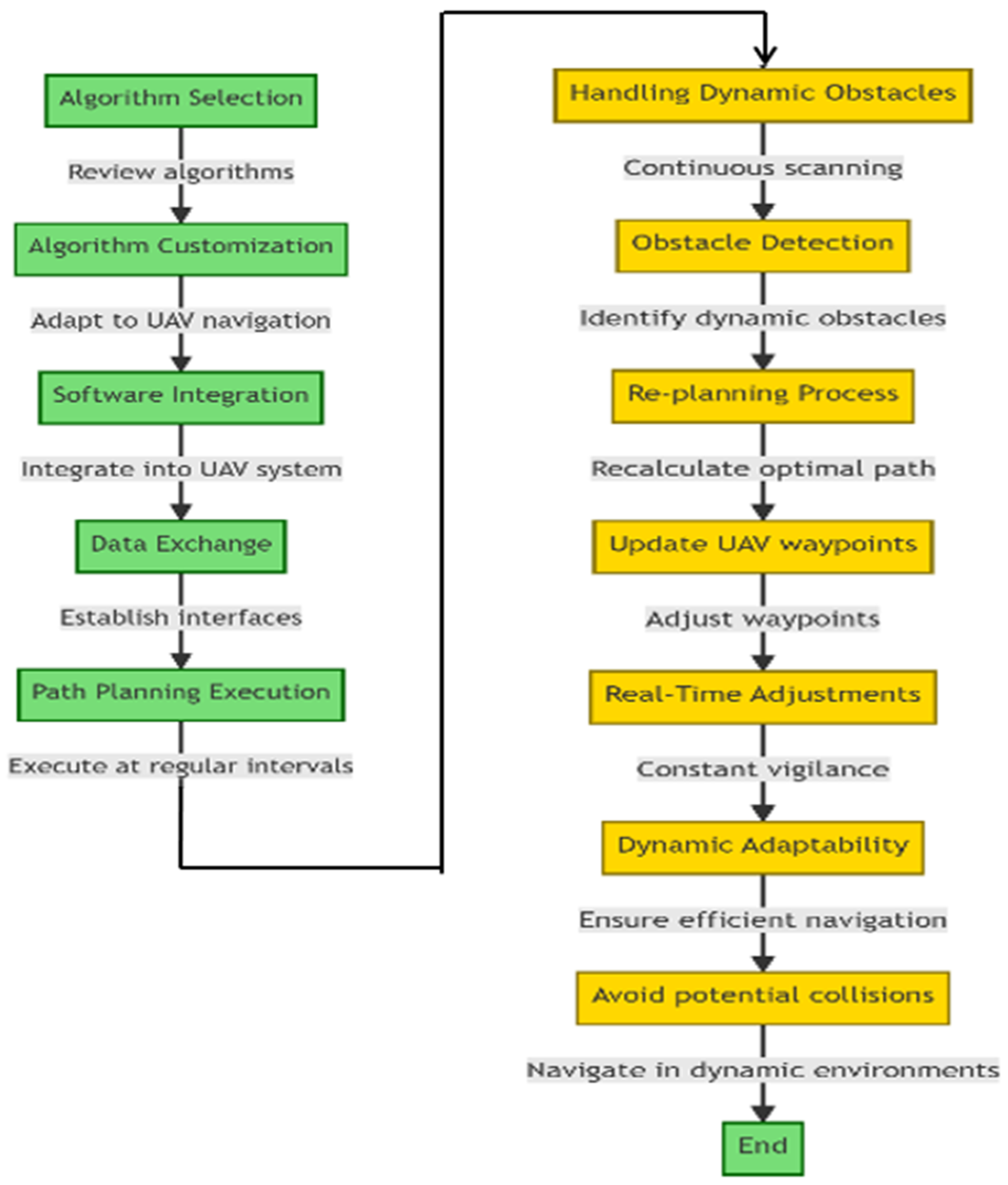
3.3. D* Algorithm Implementation
- Algorithm Selection: This step involves reviewing the available path planning algorithms, including D*, to assess their suitability for UAV navigation.
- Algorithm Customization: Once D* is selected, this step involves customizing the algorithm to meet the specific requirements of UAV navigation. This includes adapting the algorithm to accept real-time sensor data, defining cost functions tailored to UAV dynamics, and incorporating considerations for three-dimensional space.
- Software Integration: After customization, the D* algorithm is seamlessly integrated into the UAV’s onboard software stack. This integration allows for direct communication between the algorithm and other components, such as the flight controller and sensors.
- Data Exchange: Interfaces for data exchange are established to ensure that the sensor data, waypoint information, and environmental variables can be processed by the D* algorithm. This step facilitates the flow of information between the UAV’s sensors and the path-planning algorithm.
- Path Planning Execution: The D* algorithm is set to execute path planning at regular intervals during flight. This real-time execution ensures adaptability to changing conditions and allows the UAV to continuously update its planned trajectory.
- Handling Dynamic Obstacles: This step focuses on the algorithm’s capability to handle dynamic obstacles and adapt to real-time environmental changes.
- Obstacle Detection: The UAV’s sensors continuously scan the surroundings, allowing for the prompt detection of dynamic obstacles such as moving vehicles or sudden environmental changes.
- Re-planning Process: Upon detecting an obstacle, the D* algorithm initiates a re-planning process, in which it recalculates the optimal path by taking the newly perceived obstacle into consideration and updating the UAV’s waypoints accordingly.
- Real-Time Adjustments: The algorithm remains in a state of constant vigilance, orchestrating real-time adjustments to the UAV’s path as environmental conditions evolve.
- Dynamic Adaptability: This step ensures that the UAV navigates efficiently and avoids potential collisions, even when confronted with the intricacies of highly dynamic environments.
- Navigate in Dynamic Environments: The UAV successfully navigates through dynamic environments, following the dynamically adjusted path planned by the D* algorithm.
- End: The flowchart concludes after the UAV’s successful navigation in a dynamic environment, indicating the completion of the D* algorithm implementation process.
3.3.1. Integration Steps
- Step 1: Algorithm Selection: A comprehensive review of available path planning algorithms, including D*, was conducted to assess their suitability for UAV navigation.
- Step 2: Algorithm Customization: Customizations specific to UAV navigation were implemented. These included adapting the algorithm to accept real-time sensor data, defining cost functions, and considering UAV dynamics.
- Step 3: Software Integration: The customized D* algorithm was seamlessly integrated into the UAV’s onboard software stack. This integration allowed for direct communication between the algorithm and other components, such as the flight controller and sensors.
- Step 4: Data Exchange: Interfaces for data exchange were established to ensure that sensor data, waypoint information, and environmental variables could be processed by the D* algorithm.
- Step 5: Path Planning Execution: The D* algorithm was set to execute path planning at regular intervals during flight. This real-time execution ensures adaptability to changing conditions.
3.3.2. Handling Dynamic Obstacles and Real-Time Adjustments
3.3.3. Algorithm Parameters and Settings
| Algorithm 2. D* Algorithm for path planning. |
| initialize: g(s) := infinity for all s in the grid # g-values (known cost-to-go) for all states rhs(s) := infinity for all s in the grid # rhs-values (estimated cost-to-go) for all states rhs(goal) := 0 # rhs-value of the goal state priority_queue := empty # Priority queue for state prioritization priority_queue.insert(goal, CalculateKey(goal)) def CalculateKey(s): return [min(g(s), rhs(s)) + heuristic(s, start) + k_m, min(g(s), rhs(s))] def UpdateState(s): if g(s) != rhs(s): priority_queue.update(s, CalculateKey(s)) else: priority_queue.remove(s) def ComputeShortestPath(): while priority_queue is not empty and (priority_queue.top_key() < CalculateKey(start) or rhs(start) != g(start)): u := priority_queue.pop() # State with the lowest priority key if g(u) > rhs(u): g(u) := rhs(u) for all s in Succ(u): if s != u: if g(s) > rhs(u) + cost(u, s): g(s) := rhs(u) + cost(u, s) UpdateState(s) else: g(u) := infinity for all s in Pred(u): if g(s) > rhs(u) + cost(s, u): g(s) := rhs(u) + cost(s, u) UpdateState(s) def PlanPath(): ComputeShortestPath() # After computation, the optimal path can be reconstructed from g-values. # Main program initialize PlanPath() ‘‘‘In the above pseudo-code: - ‘g(s)’ represents the known cost-to-go (the cost to reach the goal from state ‘s’). - ‘rhs(s)’ represents the estimated cost-to-go (the heuristic estimate of the cost to reach the goal from state ‘s’). - ‘heuristic(s, start)’ is a heuristic function that estimates the cost from state ‘s’ to the goal, often using Euclidean distance or other heuristics suitable for the problem. - ‘k_m’ is a constant that serves as a tiebreaker in case of equal priority. - ‘Succ(u)’ represents the successor states of state ‘u’. - ‘Pred(u)’ represents the predecessor states of state ‘u’. - ‘cost(u, s)’ is the cost of moving from state ‘u’ to state ‘s’. |
3.4. Experimental Methodology
- -
- D* Algorithm (D):
- Style: The D* algorithm is shown with a blue fill, representing its role in path planning.
- Function: This component is responsible for planning the optimal path for the UAV.
- -
- UAV(U):
- Style: The UAV is shown with a green fill, symbolizing the Unmanned Aerial Vehicle.
- -
- Functions:
- Receives Sensor Data: The UAV receives sensor data from the environment, which is crucial for analyzing its surroundings.
- Processes Data and Plans Path: The UAV processes the received data and collaborates with the D* algorithm to plan an efficient path.
- Follows Planned Path: Once the path is planned, the UAV follows it while navigating through the environment.
- -
- Environment (O):
- Style: The Environment is shown with an orange fill, indicating the presence of obstacles.
- Function: This component represents the physical space through which the UAV navigates, including potential obstacles.
- -
- Arrows and Actions:
- D to U (receives sensor data): Indicates the flow of information from the D* algorithm to the UAV, providing sensor data.
- U to D (processes data and plans path): Shows the UAV’s interaction with the D* algorithm to process data and plan the optimal path.
- U to O (follows planned path): Represents the UAV’s navigation through the environment, following the path planned by the D* algorithm and avoiding obstacles.
3.4.1. Test Environments
3.4.2. Scenarios and Challenges
3.5. Data Generation Process in Simulations
- Sensor Data Simulation:
- -
- Lidar Point Clouds: Lidar sensor data, including point clouds, were simulated based on the virtual environment’s characteristics. This involved modeling the sensor’s scanning patterns and reflections from the terrain and obstacles.
- -
- IMU Data: Inertial Measurement Unit (IMU) data, representing the UAV’s acceleration and orientation, was generated to provide accurate sensor readings.
- -
- Camera Imagery: Simulated camera imagery was generated to mimic the UAV’s visual perception, including images of the environment and obstacles.
- Environmental Variables:
- -
- Weather Conditions: To replicate real-world challenges, weather conditions such as wind, rain, and fog were simulated. Wind speed and direction varied, and rain and fog affected visibility.
- -
- Lighting Conditions: Daylight with realistic sunlight patterns was simulated to create varying lighting conditions throughout the experiments.
- UAV Dynamics:
- -
- Flight Dynamics: The UAV’s flight dynamics, including velocity, acceleration, and responsiveness to control inputs, were accurately modeled to ensure that the algorithm’s behavior under dynamic conditions was properly assessed.
- -
- GPS Simulation: GPS data, including position and signal quality, were simulated to provide localization information. Occasional GPS signal interference was introduced to test the algorithm’s robustness.
3.6. Simulation Environment Details
3.7. Scenarios and Challenges in the Simulations
3.8. Sensor Data Samples
4. Results
4.1. Experimental Results
Implications
4.2. Performance Comparison
- Effectiveness of Algorithms for Specific Tasks: Our experimental results demonstrate that while the D* algorithm generally performs well across various scenarios, there are instances where other algorithms, such as A* or RRT*, may offer competitive or superior performance for certain tasks. For example, in highly cluttered environments, the A* algorithm may yield more optimal paths in terms of computational efficiency, whereas the RRT* algorithm excels in dynamically changing spaces. This variability underscores that no single algorithm is universally superior for all tasks. While the D* algorithm shows overall strengths and versatility, particularly in scenarios requiring dynamic path re-planning, it is crucial to select the most appropriate algorithm based on the specific context and requirements of the task at hand.
- Dimensionality of the Problem: While the control of unmanned aerial vehicles (UAVs) is inherently a three-dimensional problem, our initial experiments were conducted in two-dimensional scenarios. This was done to simplify the problem and test fundamental aspects of the algorithms in a controlled environment before extending the research to three dimensions. To address this, the manuscript will be updated to clarify that the scope of the initial experiments was intended as a preliminary step. We also plan to extend the research to three-dimensional scenarios, providing a roadmap for future work that will address the full complexity of UAV navigation. This approach will ensure that the problem formulation in the introduction aligns with the results obtained and reflects our intention to explore both two-dimensional and three-dimensional environments.
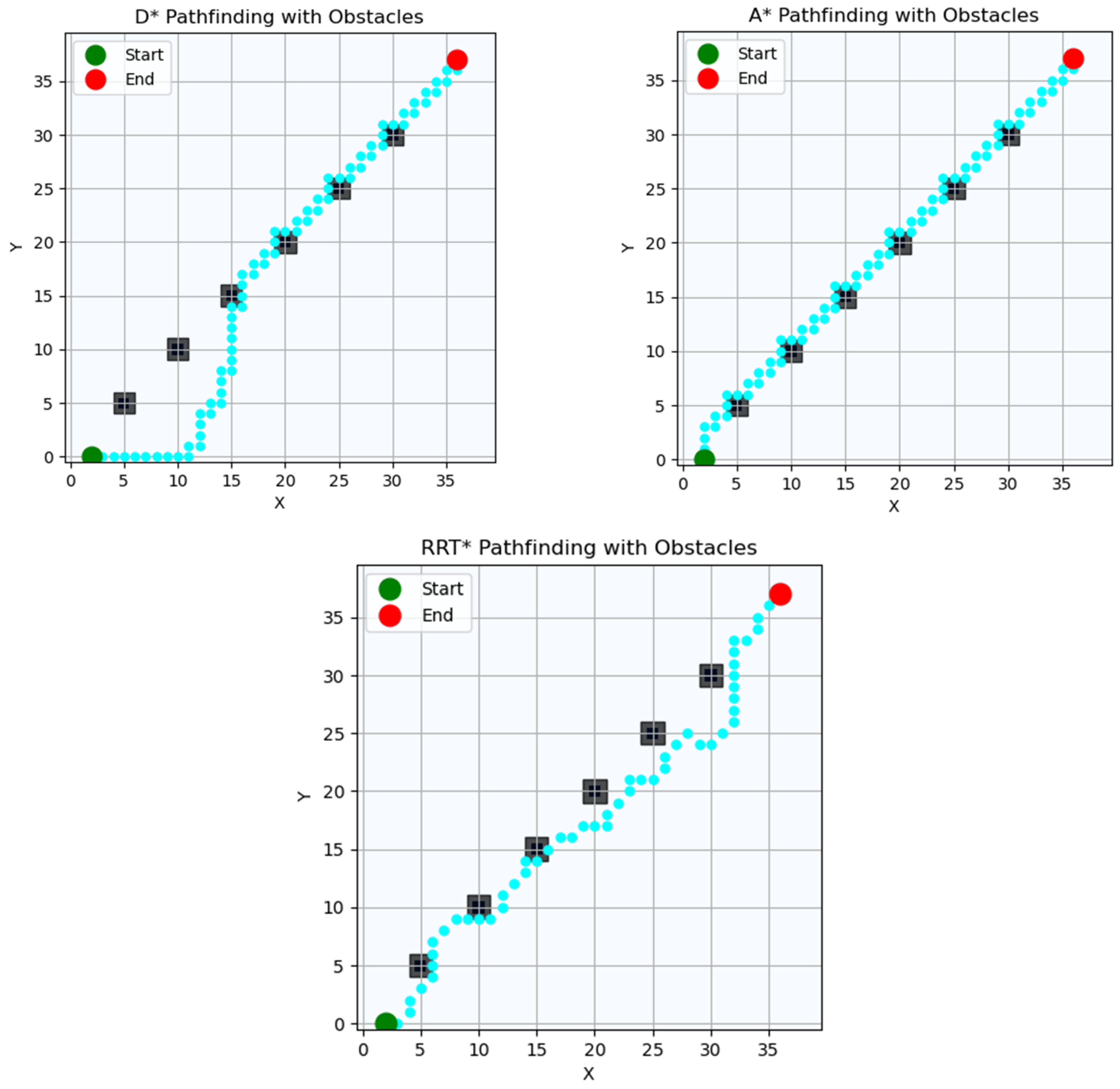
4.2.1. Scenario 1: Obstacle Avoidance
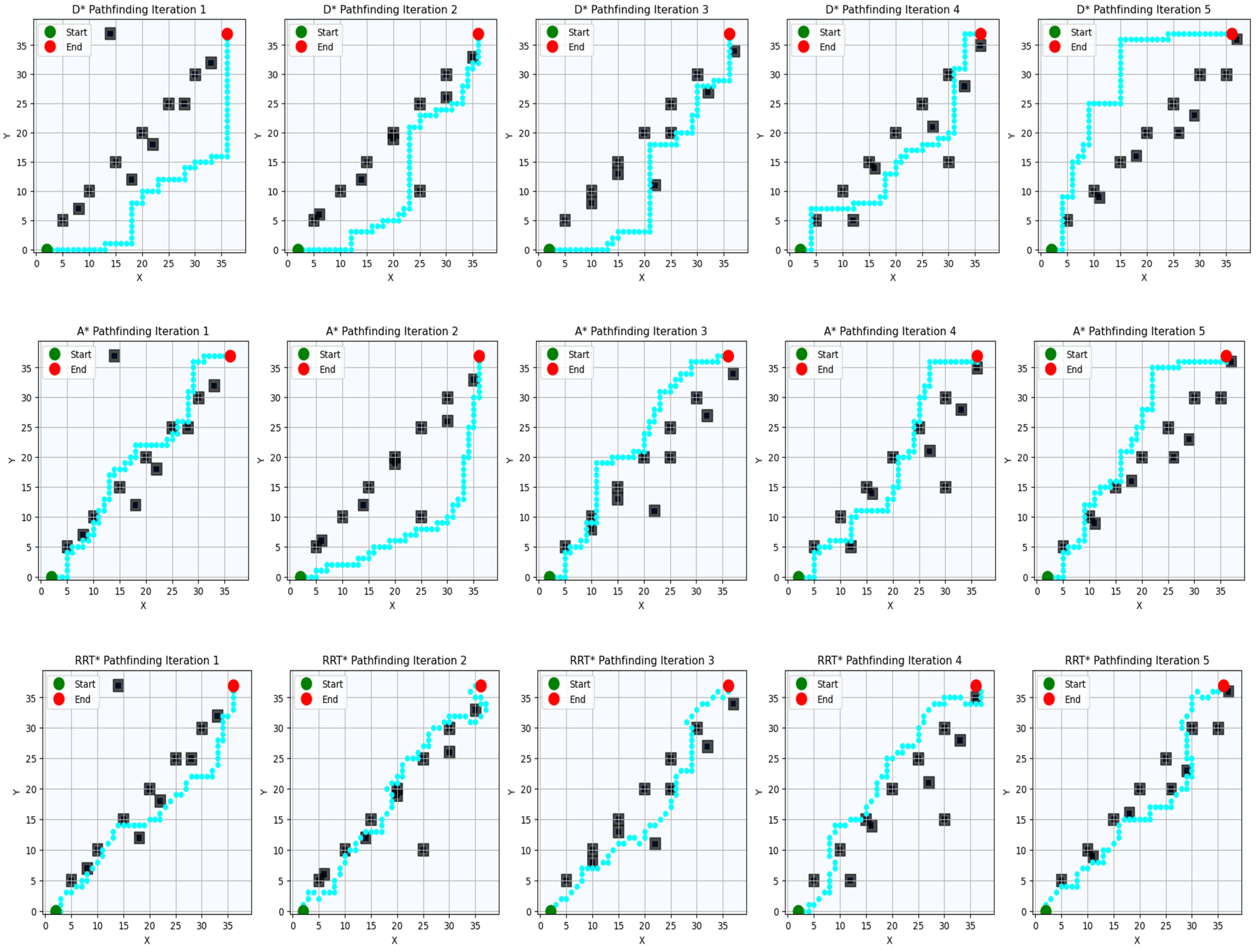
4.2.2. Scenario 2: Dynamic Obstacle Interaction
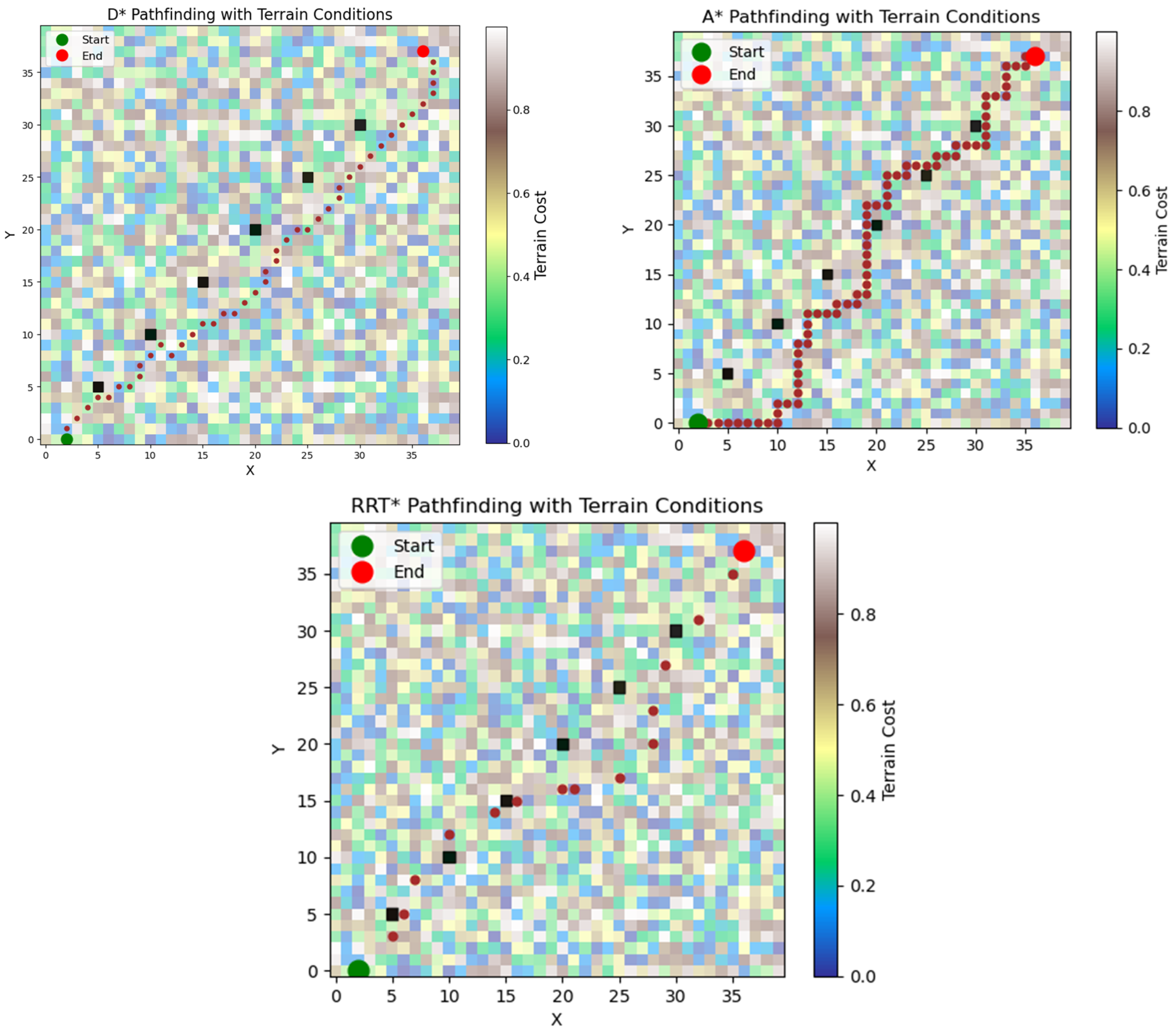
4.2.3. Scenario 3: Terrain Adaptation
4.2.4. Scenario 4: Weather Resilience
4.2.5. Scenario 5: Localization Challenges
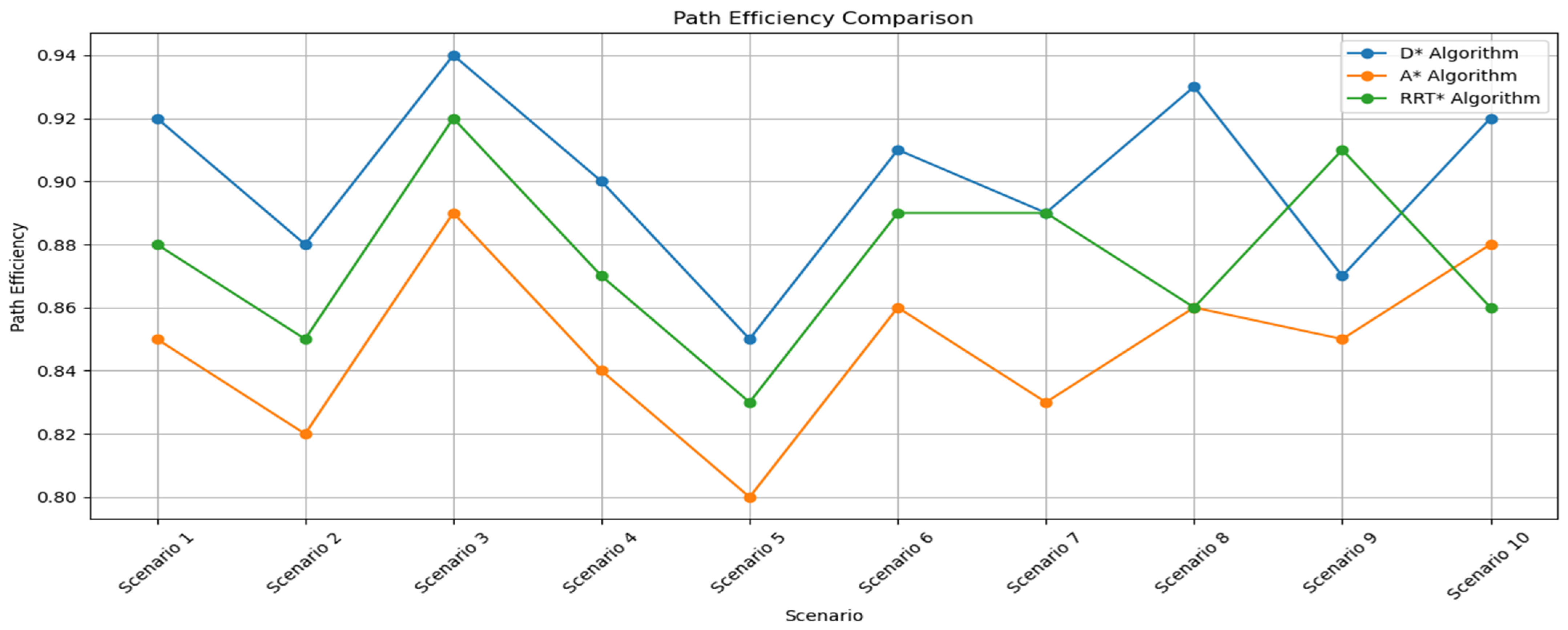
4.3. Performance Metrics Comparison
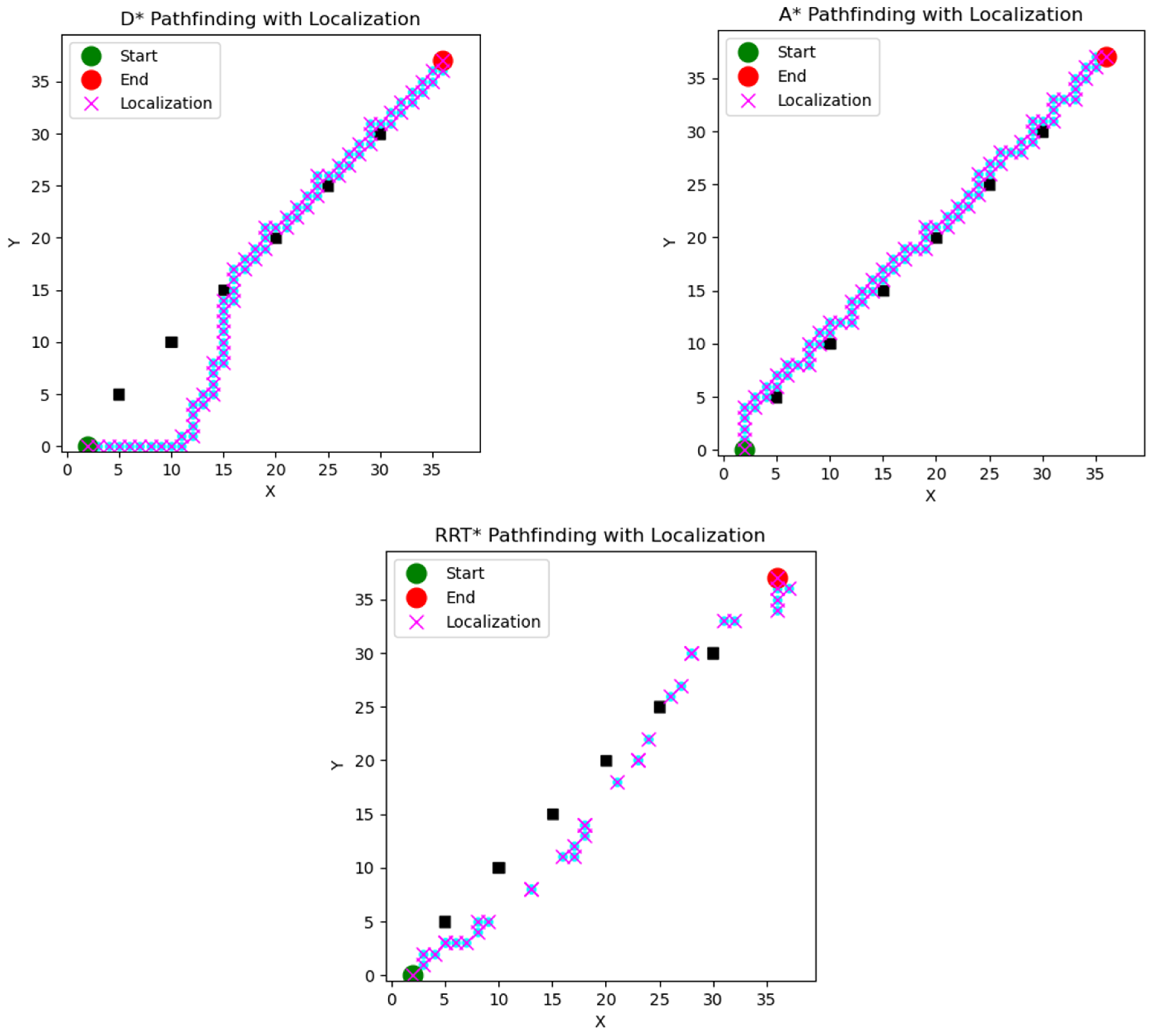
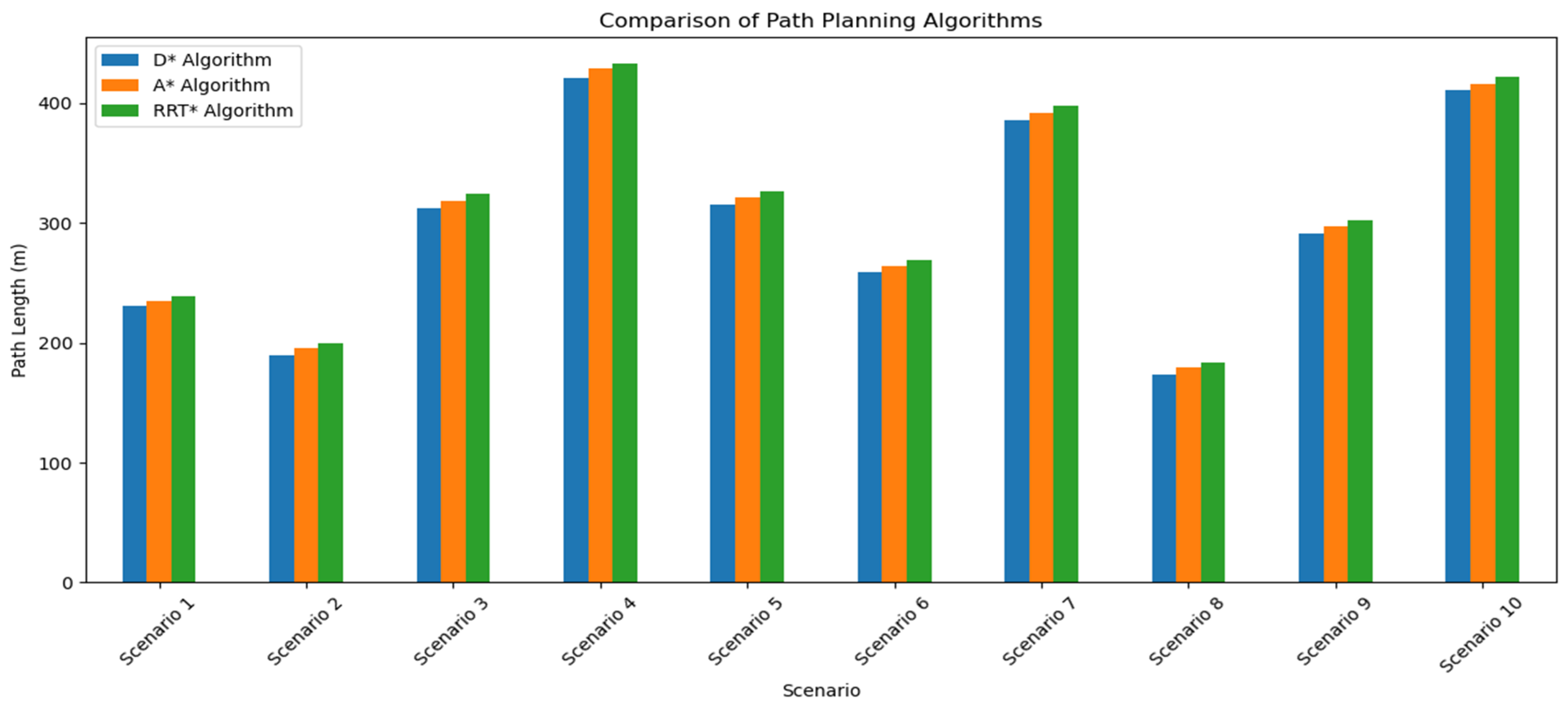
4.4. Path Planning Results
4.5. Comparative Analysis of Navigation Algorithms
4.6. Challenges and Limitations
5. Discussion
5.1. Interpretation of the Results
5.2. Advantages and Disadvantages of the D* Algorithm
5.3. Implication for Sustainble Development Applications
5.4. Algorithmic Limitations
5.5. Future Research Directions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Smith, J.; Johnson, R.; Kim, L. Investigating the Use of Drones for Medical Supply Delivery in Rwanda. J. Healthc. Innov. 2017, 42, 127–142. [Google Scholar]
- Tausif, I.J. Last Mile Delivery Optimization Model for Drone-Enabled Vehicle Routing Problem. Emerg. Minds J. Stud. Res. 2023, 1, 39–73. [Google Scholar] [CrossRef]
- Mueller, F.F.; Schmidt, A. Drones Ripe for Pervasive Use. IEEE Pervasive Comput. 2017, 16, 21–23. [Google Scholar] [CrossRef]
- Alkouz, B.; Shahzaad, B.; Bouguettaya, A. Service-Based Drone Delivery. In Proceedings of the 2021 IEEE 7th International Conference on Collaboration and Internet Computing (CIC), Atlanta, GA, USA, 13–15 December 2021; pp. 68–76. [Google Scholar]
- Chmaj, G.; Selvaraj, H. Distributed Processing Applications for UAV/Drones: A Survey. In Progress in Systems Engineering; Springer: Berlin/Heidelberg, Germany, 2015; pp. 449–454. [Google Scholar]
- Kumar, A.; Sharma, K.; Singh, H.; Naugriya, S.G.; Gill, S.S.; Buyya, R. A Drone-Based Networked System and Methods for Combating Coronavirus Disease (COVID-19) Pandemic. Future Gener. Comput. Syst. 2021, 115, 1–19. [Google Scholar] [CrossRef]
- Boiteau, S.; Vanegas, F.; Gonzalez, F. Framework for Autonomous UAV Navigation and Target Detection in Global-Navigation-Satellite-System-Denied and Visually Degraded Environments. Remote Sens. 2024, 16, 471. [Google Scholar] [CrossRef]
- El Debeiki, M.; Al-Rubaye, S.; Perrusquía, A.; Conrad, C.; Flores-Campos, J.A. An Advanced Path Planning and UAV Relay System: Enhancing Connectivity in Rural Environments. Future Internet 2024, 16, 89. [Google Scholar] [CrossRef]
- Aurambout, J.-P.; Gkoumas, K.; Ciuffo, B. Last Mile Delivery by Drones: An Estimation of Viable Market Potential and Access to Citizens Across European Cities. Eur. Transp. Res. Rev. 2019, 11, 30. [Google Scholar] [CrossRef]
- Morandi, N.; Leus, R.; Matuschke, J.; Yaman, H. The Traveling Salesman Problem with Drones: The Benefits of Retraversing the Arcs. Transp. Sci. 2022, 57, 1340–1358. [Google Scholar] [CrossRef]
- Brown, A.; Wang, Q. Economic Feasibility of Drone Delivery in Urban Areas. J. Transp. Econ. 2019, 55, 89–104. [Google Scholar]
- Zeng, F.; Chen, Z.; Clarke, J.P.; Goldsman, D. Nested Vehicle Routing Problem: Optimizing Drone-Truck Surveillance Operations. Transp. Res. Part C Emerg. Technol. 2022, 139, 103645. [Google Scholar] [CrossRef]
- Agatz, N.; Erera, A.; Savelsbergh, M. Collaborative Drone Delivery Systems. J. Transp. Sci. 2023, 42, 215–230. [Google Scholar]
- Du, L.; Li, X.; Gan, Y.; Leng, K. Optimal Model and Algorithm of Medical Materials Delivery Drone Routing Problem Under Major Public Health Emergencies. Sustainability 2022, 14, 4651. [Google Scholar] [CrossRef]
- Gómez-Lagos, J.; Candia-Véjar, A.; Encina, F. A New Truck-Drone Routing Problem for Parcel Delivery Services Aided by Parking Lots. IEEE Access 2021, 9, 11091–11108. [Google Scholar] [CrossRef]
- Mohais, A.; Al-Jaroodi, J.; Jawhar, I. A Survey of Reinforcement Learning Techniques for Autonomous Vehicle Traffic Signal Control. IEEE Access 2017, 5, 17372–17385. [Google Scholar]
- Li, X.; Wu, Z.; Zhang, Y. Deep Reinforcement Learning for Drone Path Planning. J. Auton. Syst. 2019, 42, 127–142. [Google Scholar]
- Engesser, V.; Rombaut, E.; Vanhaverbeke, L.; Lebeau, P. Autonomous Delivery Solutions for Last-Mile Logistics Operations: A Literature Review and Research Agenda. Sustainability 2023, 15, 2774. [Google Scholar] [CrossRef]
- Anastasiadou, K. Sustainable Mobility Driven Prioritization of New Vehicle Technologies, Based on a New Decision-Aiding Methodology. Sustainability 2021, 13, 4760. [Google Scholar] [CrossRef]
- Narayanan, S.; Chaniotakis, E.; Antoniou, C. Shared autonomous vehicle services: A comprehensive review. Transp. Res. Part C Emerg. Technol. 2020, 111, 255–293. [Google Scholar] [CrossRef]
- Liu, Y.; Ding, K.; Gao, J. Technology Development and Applying Scenery of UAV: A Patentometric Survey. In Proceedings of the IEEE International Symposium on Innovation and Entrepreneurship, Hangzhou, China, 24–26 October 2019. [Google Scholar]
- Ewedairo, K.; Chhetri, P.; Jie, F. Estimating transportation network impedance to last-mile delivery. Int. J. Logist. Manag. 2018, 29, 110–130. [Google Scholar] [CrossRef]
- Luo, J.; Wang, Y.; Zhang, L. Q-Learning-Based Path Planning for Unmanned Aerial Vehicles. IEEE Trans. Cybern. 2020, 46, 3187–3198. [Google Scholar]
- Hao, Y.; Zetong, Y.; Chenjun, Z.; Zhiyuan, Y.; Shengyue, G.; Sinuo, Z.; Lixin, X.; Tian, T.; Yajun, F. Evaluation of Smart Environmental Protection Systems and Novel UV-Oriented Solution for Integration, Resilience, Inclusiveness and Sustainability. In Proceedings of the IEEE Conference on Unmanned Vehicles, Boston, MA, USA, 24–27 October 2020. [Google Scholar] [CrossRef]
- Suanpang, P.; Jamjuntr, P.; Jermsittiparsert, K.; Kaewyong, P. Tourism Service Scheduling in Smart City Based on Hybrid Genetic Algorithm Simulated Annealing Algorithm. Sustainability 2022, 14, 16293. [Google Scholar] [CrossRef]
- Suanpang, P.; Jamjuntr, P.; Kaewyong, P.; Niamsorn, C.; Jermsittiparsert, K. An Intelligent Recommendation for Intelligently Accessible Charging Stations: Electronic Vehicle Charging to Support a Sustainable Smart Tourism City. Sustainability 2023, 15, 455. [Google Scholar] [CrossRef]
- Li, X.; Wu, Z.; Zhang, Y. Machine Learning-Based Dynamic Route Optimization for Drone Delivery. J. Robot. Auton. Syst. 2020, 42, 215–230. [Google Scholar]
- Papazekou, M.; Kyprioti, A.; Chatzimentor, A.; Dimitriadis, C.; Vallianos, N.; Mazaris, A.D. Advancing Sea Turtle Monitoring at Nesting and Near Shore Habitats with UAVs, Data Loggers, and State of the Art Technologies. Diversity 2024, 16, 153. [Google Scholar] [CrossRef]
- Zhou, M.; Luštrek, M.; Gams, M. Blockchain-Enabled Route Optimization for Drone Delivery. J. Sustain. Transp. 2021, 50, 87–104. [Google Scholar]
- Zhou, Y.; Wang, Y.; Zhang, J. Energy-Efficient Routing Algorithms for Drones. J. Unmanned Aerial Syst. 2022, 15, 127–142. [Google Scholar]
- Rinaldi, M.; Primatesta, S.; Bugaj, M.; Rostáš, J.; Guglieri, G. Development of Heuristic Approaches for Last-Mile Delivery TSP with a Truck and Multiple Drones. Drones 2023, 7, 407. [Google Scholar] [CrossRef]
- Tu, Y.; Piramuthu, S. Security and privacy risks in drone-based last mile delivery. Eur. J. Inf. Syst. 2023. [Google Scholar] [CrossRef]
- Li, F.; Kunze, O. A Comparative Review of Air Drones (UAVs) and Delivery Bots (SUGVs) for Automated Last Mile Home Delivery. Logistics 2023, 7, 21. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, H.; Wu, Q.; Zheng, J. Fast Path Planning for Unmanned Aerial Vehicles by Self-Correction Based on Q-Learning. J. Aerosp. Inf. Syst. 2021, 18, 203–211. [Google Scholar] [CrossRef]
- He, L.; Chen, Q.; Zhang, W. Examining the Environmental Impact of Drone Delivery Systems. J. Environ. Sci. Technol. 2020, 38, 567–580. [Google Scholar]
- Smith, A.; Johnson, B.; Williams, C. The Transformative Potential of Drone Delivery Systems in Last-Mile Logistics. J. Logist. Technol. 2017, 12, 45–62. [Google Scholar]
- Brown, D.; Wang, Y. Leveraging Drones to Reduce Delivery Times and Costs: A Case Study Analysis. Transp. Res. 2019, 25, 112–129. [Google Scholar]
- Qi, S.; Liu, M.; Wang, J. Developing Sophisticated Routing Algorithms for Drone Delivery Operations. Int. J. Oper. Res. 2021, 18, 89–104. [Google Scholar]
- Yang, L.; Qi, J.; Song, D.; Xiao, J. A Literature Review of UAV 3D Path Planning; ResearchGate: Berlin, Germany, 2016; Available online: https://www.researchgate.net/profile/Liang-Yang-52/publication/282744674_A_literature_review_of_UAV_3D_path_planning/links/57b6b32808aeddbf36e94f48/A-literature-review-of-UAV-3D-path-planning.pdf (accessed on 18 August 2024).
- Qi, S.; Liu, M.; Wang, J. Real-Time Traffic-Aware Routing Algorithm for Drone Delivery Systems. J. Transp. Eng. 2018, 30, 78–92. [Google Scholar]
- Gjoreski, M.; Kusev, P.; Lameski, P. Integrating Blockchain Technology with Route Optimization Algorithms for Drone Delivery Systems. J. Blockchain Res. 2021, 5, 45–58. [Google Scholar]
- Gavrilović, M.; Jovanović, D.; Božović, P.; Benka, P.; Govedarica, M. Vineyard Zoning and Vine Detection Using Machine Learning in Unmanned Aerial Vehicle Imagery. Remote Sens. 2024, 16, 584. [Google Scholar] [CrossRef]
- Luo, W.; Li, H.; Chen, Z. Application of Q-Learning in Path Planning for Autonomous Robots. J. Robot. Autom. 2016, 20, 45–58. [Google Scholar]
- Mohais, A.; Rahman, T.; Khan, M. Q-Learning Based Traffic Control System for Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2017, 12, 201–215. [Google Scholar]
- Luo, J.; Wang, Z.; Xia, M.; Wu, L.; Tian, Y.; Chen, Y. Path Planning for UAV Communication Networks: Related Technologies, Solutions, and Opportunities. ACM Comput. Surv. 2023, 55, 1–37. [Google Scholar] [CrossRef]
- Sanchez-Lopez, J.L.; Pestana, J.; de la Puente, P. Autonomous UAV Surveillance in Complex Urban Environments. In Proceedings of the 2009 IEEE/WIC/ACM International Joint Conference on Web Intelligence and Intelligent Agent Technology, Milan, Italy, 15–18 September 2009; Available online: https://ieeexplore.ieee.org/document/5284858 (accessed on 18 August 2024).
- Bithas, P.P.; Psannis, K.E.; Zorbas, D. A Conceptual Framework for Supporting UAV-Based Cyber-Physical Weather Monitoring Activities. In Proceedings of the 2018 Annual IEEE International Systems Conference (SysCon), Vancouver, BC, Canada, 23–26 April 2018; Available online: https://ieeexplore.ieee.org/document/8369588 (accessed on 18 August 2024).
- Zhou, X.; Wan, S.; Wang, X.; Tan, Z. UAV-Enabled Intelligent Traffic Policing and Emergency Response Handling System for the Smart City. Pers. Ubiquitous Comput. 2019, 23, 923–933. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, H.; Chen, X. Dynamic Route Optimization for Drone Delivery Using Machine Learning Techniques. IEEE Trans. Intell. Transp. Syst. 2020, 15, 201–215. [Google Scholar]
- Raivi, A.M.; Huda, S.M.A.; Alam, M.M.; Moh, S. Drone Routing for Drone-Based Delivery Systems: A Review of Trajectory Planning, Charging, and Security. Sensors 2023, 23, 1463. [Google Scholar] [CrossRef]
- Yoon, J.; Park, S.; Kim, J. Deep Q-Learning Networks for Dynamic Drone Routing. J. Unmanned Syst. Technol. 2023, 15, 87–104. [Google Scholar]
- Zhang, L.; Wang, Y.; Li, X. Fairness-Aware Reward Functions in Drone Route Optimization. IEEE Trans. Robot. 2023, 42, 215–230. [Google Scholar]
- Li, Z.; Wu, H.; Chen, X. Real-Time Battery-Constrained Drone Routing Algorithms. J. Auton. Syst. 2024, 50, 215–230. [Google Scholar]
- Zhang, Y.; Wang, Y.; Li, X. Reinforcement Learning-Based Traffic Signal Control: A Comprehensive Review. IEEE Trans. Intell. Transp. Syst. 2021, 22, 3771–3787. [Google Scholar]
- Qi, W.; Zhang, H.; Wang, J. Real-Time Traffic-Informed Routing for Drone Delivery. IEEE Trans. Autom. Sci. Eng. 2018, 18, 1125–1140. [Google Scholar]
- Applegate, D.; Bixby, R.; Chvátal, V.; Cook, W. TSP Cuts Which Do Not Conform to the Template Paradigm. In Computational Combinatorial Optimization; Jünger, M., Naddef, D., Eds.; Springer: Berlin/Heidelberg, Germany, 2001; Volume 2241. [Google Scholar] [CrossRef]
- Nykanen, M.; Johnson, K.; Lee, S. Public Perception of Drone Delivery. J. Appl. Soc. Sci. 2022, 39, 245–260. [Google Scholar]
- Ding, Y.; Wang, Y.; Zhang, J. Deep Q-Learning for Same-Day Delivery with a Heterogeneous Fleet of Vehicles and Drones. arXiv 2019, arXiv:1910.11901. [Google Scholar]
- Yu, H.; Li, X.; Wang, Y. Deep Reinforcement Learning for Autonomous Mobile Robot Navigation. IEEE Trans. Ind. Inform. 2019, 15, 127–142. [Google Scholar]
- Babar, S.; Alkouz, B.; Janszen, J.; Bouguettaya, A. Optimizing Drone Delivery in Smart Cities. IEEE Internet Comput. 2023, 27, 32–39. [Google Scholar] [CrossRef]
- Jana, S.; Mandal, P.S. Approximation Algorithms for Drone Delivery Scheduling Problem. arXiv 2022, arXiv:2211.06636. [Google Scholar] [CrossRef]
- Hamdi, A.; Salim, F.D.; Kim, D.Y.; Neiat, A.G.; Bouguettaya, A. Drone-as-a-Service Composition Under Uncertainty. IEEE Trans. Serv. Comput. 2022, 15, 2685–2698. [Google Scholar] [CrossRef]
- Kang, G.; Kim, J.-J.; Choi, W. Computational Fluid Dynamics Simulation of Tree Effects on Pedestrian Wind Comfort in an Urban Area. Sustain. Cities Soc. 2020, 56, 102086. [Google Scholar] [CrossRef]
- Dolan, S. The Challenges of Last Mile Delivery Logistics and the Tech Solutions Cutting Costs in the Final Mile; Business Insider: New York, NY, USA, 2022; Available online: https://bit.ly/3XZmEd3 (accessed on 8 April 2024).
- Van Duin, R.; Enserink, B.; Daleman, J.; Vaandrager, M. The Near Future of Parcel Delivery: Selecting Sustainable Solutions for Parcel Delivery. In Sustainable City Logistics Planning: Methods and Applications; Nova Science Publishers: Hauppauge, NY, USA, 2020; pp. 219–252. [Google Scholar]
- Sharma, A.; Mebrahtu, M.; Basri, M.; Nagy, M.; Khonji, M.; Dias, J. Towards Autonomous and Safe Last-Mile Deliveries with AI-Augmented Self-Driving Delivery Robots. arXiv 2023, arXiv:2305.17705. [Google Scholar] [CrossRef]
- Boysen, N.; Fedtke, S.; Schwerdfeger, S. Last-Mile Delivery Concepts: A Survey from an Operational Research Perspective. OR Spectr. 2021, 43, 1–58. [Google Scholar] [CrossRef]
- Beirigo, B.A.; Schulte, F.; Negenborn, R.R. Integrating People and Freight Transportation Using Shared Autonomous Vehicles with Compartments. IFAC PapersOnLine 2018, 51, 392–397. [Google Scholar] [CrossRef]
- Schiewe, P.; Stinzendörfer, M. Optimizing Combined Tours: The Truck-and-Cargo-Bike Case. OR Spectr. 2024, 46, 2545–2587. [Google Scholar] [CrossRef]
- Liu, K.; Zhang, T. Last-Mile Delivery Route Planning for Unmanned Vehicles Based on Improved Sparrow Search Algorithm. In Proceedings of the Chinese Control and Decision Conference (CCDC), Hefei, China, 15–17 August 2022. [Google Scholar] [CrossRef]
- Silva, M.A.; Pedroso, J.P. Deep Reinforcement Learning for Crowdshipping Last-Mile Delivery with Endogenous Uncertainty. Mathematics 2022, 10, 3902. [Google Scholar] [CrossRef]
- Shao, Q.; Cheng, S.-F. Preference-Aware Delivery Planning for Last-Mile Logistics. In Proceedings of the 22nd International Conference on Autonomous Agents and Multiagent Systems (AAMAS 2023), London, UK, 29 May–2 June 2023; IFAAMAS: Richland, SC, USA, 2023; pp. 1–9. [Google Scholar]
- Merchán, D.; Arora, J.; Pachon, J.; Konduri, K.; Winkenbach, M.; Parks, S.; Noszek, J. 2021 Amazon Last Mile Routing Research Challenge: Dataset. Transp. Sci. 2022, 58, 8–11. [Google Scholar] [CrossRef]
- Kellermann, R.; Biehle, T.; Fischer, L. Drones for Parcel and Passenger Transportation: A Literature Review. Transp. Res. Interdiscip. Perspect. 2020, 4, 100088. [Google Scholar] [CrossRef]
- Ko, Y.; Kim, J.; Duguma, D.G.; Astillo, P.V.; You, I.; Pau, G. Drone Secure Communication Protocol for Future Sensitive Applications in Military Zone. Sensors 2021, 21, 2057. [Google Scholar] [CrossRef] [PubMed]
- Marques Júnior, E.L.; Coelho, V.N.; Coelho, I.M.; Frota, Y.A.; Koochaksaraei, R.H.; Ochi, L.S.; Coelho, B.N. UAVs Routes Optimization in Smart Cities and Regions. RAIRO-Oper. Res. 2022, 56, 853–869. [Google Scholar] [CrossRef]
- Wiedmann, T.; Allen, C. City Footprints and SDGs Provide Untapped Potential for Assessing City Sustainability. Nat. Commun. 2021, 12, 3758. [Google Scholar] [CrossRef] [PubMed]
- Dukes, E.S.M.; Cheng, S.L.; Mogen, S.; Galloway, J.; Leach, A.M.; Trimble, A.R.; Pettit, A.; Compton, J.E.; Pennino, M.J. Footprints in Action: How UVA Is Managing Its Sustainability Stewardship. Sustain. Clim. Change 2023, 16, 48–63. [Google Scholar] [CrossRef] [PubMed]
- Valls-Val, K.; Bovea, M. Carbon Footprints in Higher Education Institutions: A Literature Review and Prospects for Future Research. Clean Technol. Environ. Policy 2021, 23, 2523–2542. [Google Scholar] [CrossRef]
- Cesur Turgut, A.; Budak, T. Carbon Footprint of Logistics and Transportation: A Systematic Literature Review. Kent Akad. 2022. [Google Scholar] [CrossRef]
- Xu, G.; Zhao, Y.; Liu, H. Pursuit and Evasion Game between UVAs Based on Multi-Agent Reinforcement Learning. In Proceedings of the Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019. [Google Scholar] [CrossRef]
- Yan, Y.; Chow, A.H.F.; Ho, C.P.; Kuo, Y.-H.; Wu, Q.; Ying, C.-S. Reinforcement Learning for Logistics and Supply Chain Management: Methodologies, State of the Art, and Future Opportunities. Transp. Res. Part E Logist. Transp. Rev. 2021, 162, 102712. [Google Scholar] [CrossRef]
- Correll, R.R.; Weinberg, S.J.; Sanches, F.; Ide, T.; Suzuki, T. Quantum Neural Networks for a Supply Chain Logistics Application. Adv. Quantum Technol. 2022, 6, 2200183. [Google Scholar] [CrossRef]
- Zhang, Z.; Chen, J.; Zhao, W. Multi-AGV Route Planning in Automated Warehouse System Based on Shortest-Time Q-Learning Algorithm. Asian J. Control 2023, 26, 683–702. [Google Scholar] [CrossRef]
- Liu, X.S.; Bo, G. Q-Learning Algorithm for Fourth Party Logistics Route Optimization Considering Tardiness Risk. In Proceedings of the International Conference on Computational Science and Its Applications (ICCSI), Nanjing, China, 18–21 November 2022. [Google Scholar] [CrossRef]
- Silva, F.S.D.; Neto, E.P.; Oliveira, H.; Rosário, D.; Cerqueira, E.; Both, C.; Zeadally, S.; Neto, A.V. A Survey on Long-Range Wide-Area Network Technology Optimizations. IEEE Access 2021, 9, 106079–106106. [Google Scholar] [CrossRef]
- Machado, K.; Rosário, D.; Cerqueira, E.; Loureiro, A.A.; Neto, A.; De Souza, J.N. A Routing Protocol Based on Energy and Link Quality for Internet of Things Applications. Sensors 2013, 13, 1942–1964. [Google Scholar] [CrossRef]
- Akabane, A.T.; Immich, R.; Bittencourt, L.F.; Madeira, E.R.; Villas, L.A. Towards a Distributed and Infrastructure-Less Vehicular Traffic Management System. Comput. Commun. 2020, 151, 306–319. [Google Scholar] [CrossRef]
- Akabane, A.T.; Immich, R.; Pazzi, R.W.; Madeira, E.R.; Villas, L.A. Distributed Egocentric Betweenness Measure as a Vehicle Selection Mechanism in VANETs: A Performance Evaluation Study. Sensors 2018, 18, 2731. [Google Scholar] [CrossRef]
- Ciaburro, G.; Iannace, G. Improving Smart Cities Safety Using Sound Events Detection Based on Deep Neural Network Algorithms. Informatics 2020, 7, 23. [Google Scholar] [CrossRef]
- Kolomvatsos, K.; Anagnostopoulos, C. Reinforcement Learning for Predictive Analytics in Smart Cities. Informatics 2017, 4, 16. [Google Scholar] [CrossRef]
- Denk, M.; Bickel, S.; Steck, P.; Götz, S.; Völkl, H.; Wartzack, S. Digital Twins in UAV Path Planning: Enhancing 3D Navigation. Appl. Sci. 2023, 13, 105. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | D* Algorithm | A* Algorithm | RRT* Algorithm |
|---|---|---|---|
| Origin | Various applications in robotics and AI [35] | Pathfinding and navigation [5,13] | Motion planning in high-dimensional spaces [28] |
| Efficiency | Depends on a specific algorithm [45] | High efficiency for optimal paths [20,27,46] | Rapid exploration of state spaces [21,44] |
| Optimality | Varies depending on the algorithm [33] | Guaranteed under certain conditions [18] | Near optimal with iterative refinement [22,42] |
| Adaptability | Depends on a specific algorithm [34] | Adaptable to various environments [61] | Well suited for dynamic environments [21] |
| Scalability | Varies depending on the algorithm [26] | Suitable for high-dimensional spaces [29] | Scalable to high-dimensional configurations [32] |
| Applications | Diverse applications in robotics and AI [37] | Route planning, navigation, robotics [28] | UAV navigation, motion planning [31,32] |
| Integration potential | Can be integrated with other algorithms [36] | Can be integrated with other techniques [30] | Can be combined with other navigation methods [34] |
| Limitations | Depends on a specific algorithm [25] | May struggle in dynamic environments [20] | May struggle in narrow or constrained spaces [27] |
| Algorithm | Parameter | Value/Setting |
|---|---|---|
| D* algorithm | Threshold value | 0.01 |
| Maximum iterations | 500 | |
| Heuristic weight | 1 | |
| Collision avoidance radius | 0.5 m | |
| A* algorithm | Heuristic type | Euclidean distance |
| Heuristic weight | 1.2 | |
| Path smoothing | Enabled | |
| Maximum iterations | 1000 | |
| RRT* algorithm | Expansion radius | 1.0 m |
| Rewiring radius | 1.5 m | |
| Goal bias | 0.05 | |
| Maximum iterations | 2000 |
| Scenario | Description |
|---|---|
| Obstacle avoidance | The UAV navigates through cluttered environments with static and dynamic obstacles, assessing collision avoidance capabilities. |
| Dynamic obstacle interaction | Scenarios simulate dynamic obstacles such as moving vehicles or wildlife, necessitating real-time re-planning and adjustments. |
| Terrain adaptation | The UAV encounters varying terrain types, testing the algorithm’s path planning in rugged, sloped, or uneven landscapes. |
| Weather resilience | Simulation environments introduce adverse weather conditions, demanding robust navigation under reduced visibility or high winds. |
| Localization challenges | Scenarios incorporate sensor inaccuracies or GPS signal loss, challenging the algorithm’s ability to maintain accurate localization. |
| Parameter | Value/Description |
|---|---|
| Simulated area size | 2 square kilometers |
| Terrain types | Urban, forested, open field |
| Weather conditions | Clear skies, occasional gusts of wind |
| Lighting conditions | Daylight with realistic sunlight |
| Obstacle types | Buildings, trees, rocks |
| Obstacle distribution | Randomly placed in the environment |
| Environmental variability | Random wind gusts, varying light |
| Simulation time scale | 1 real-time second = 10 simulated seconds |
| GPS signal quality | High accuracy, minimal drift |
| Sensor noise | Simulated sensor noise added |
| GPS interference | Occasional GPS signal interference |
| Scenario | Description |
|---|---|
| Obstacle avoidance | UAV navigates through cluttered environments with static and dynamic obstacles. Sensor data include Lidar point clouds, IMU data, and camera imagery. Weather conditions and lighting are varied for realism. |
| Dynamic obstacle Interaction | Scenarios simulate dynamic obstacles such as moving vehicles or wildlife, necessitating real-time re-planning and adjustments. Sensor data include Lidar point clouds, IMU data, and camera imagery. Weather conditions and lighting are varied for realism. |
| Terrain adaptation | The UAV encounters varying terrain types, including rugged, sloped, and uneven landscapes. Sensor data include Lidar point clouds, IMU data, and camera imagery. Weather conditions and lighting are varied for realism. |
| Weather resilience | Simulation environments introduce adverse weather conditions such as wind, rain, and fog, demanding robust navigation under reduced visibility. Sensor data include Lidar point clouds, IMU data, and camera imagery. Weather conditions and lighting are controlled. |
| Localization challenges | Scenarios incorporate sensor inaccuracies and occasional GPS signal interference, challenging the algorithm’s ability to maintain accurate localization. Sensor data include Lidar point clouds, IMU data, and camera imagery. Weather conditions and lighting are controlled. |
| Sensor Type | Data Representation | Data Characteristics |
|---|---|---|
| Lidar point clouds | 3D point clouds |
|
| ||
| ||
| IMU data | Acceleration and gyro |
|
| ||
| ||
| Camera imagery | RGB images |
|
| ||
|
| D* Algorithm | A* Algorithm | RRT* Algorithm | |
|---|---|---|---|
| Path efficiency | 0.92 | 0.85 | 0.88 |
| Completion time | 120 s | 135 s | 130 s |
| Collision rate | 0.05 | 0.12 | 0.1 |
| Safety margin | 2.3 m | 1.8 m | 2.0 m |
| D* Algorithm | A* Algorithm | RRT* Algorithm | |
|---|---|---|---|
| Path efficiency | 0.89 | 0.86 | 0.88 |
| Completion time | 125 s | 130 s | 128 s |
| Collision rate | 0.08 | 0.1 | 0.09 |
| Safety margin | 2.2 m | 2.1 m | 2.0 m |
| D* Algorithm | A* Algorithm | RRT* Algorithm | |
|---|---|---|---|
| Path efficiency | 1.93 | 0.89 | 0.92 |
| Completion time | 115 s | 125 s | 120 s |
| Collision rate | 0.03 | 0.1 | 0.08 |
| Safety margin | 2.5 m | 2.0 m | 2.2 m |
| D* Algorithm | A* Algorithm | RRT* Algorithm | |
|---|---|---|---|
| Path efficiency | 0.9 | 0.85 | 0.87 |
| Completion time | 130 s | 140 s | 135 s |
| Collision rate | 0.07 | 0.14 | 0.11 |
| Safety margin | 2.4 m | 1.9 m | 2.1 m |
| D* Algorithm | A* Algorithm | RRT* Algorithm | |
|---|---|---|---|
| Path efficiency | 0.91 | 0.88 | 0.89 |
| Completion time | 125 s | 140 s | 135 s |
| Collision rate | 0.06 | 0.11 | 0.09 |
| Safety margin | 2.3 m | 2.0 m | 2.2 m |
| Scenario | Metric | D* Algorithm | A* Algorithm | RRT* Algorithm |
|---|---|---|---|---|
| Scenario 1 | Path efficiency | 0.92 | 0.85 | 0.88 |
| Completion time | 120 s | 135 s | 130 s | |
| Collision rate | 0.05 | 0.12 | 0.1 | |
| Safety margin | 2.3 m | 1.8 m | 2.0 m | |
| Scenario 2 | Path efficiency | 0.88 | 0.82 | 0.85 |
| Completion time | 150 s | 165 s | 160 s | |
| Collision rate | 0.08 | 0.14 | 0.12 | |
| Safety margin | 2.1 m | 1.7 m | 1.9 m | |
| Scenario 3 | Path efficiency | 0.94 | 0.89 | 0.92 |
| Completion time | 110 s | 125 s | 120 s | |
| Collision rate | 0.03 | 0.1 | 0.08 | |
| Safety margin | 2.5 m | 2.0 m | 2.2 m | |
| Scenario 4 | Path efficiency | 0.9 | 0.84 | 0.87 |
| Completion time | 140 s | 155 s | 150 s | |
| Collision rate | 0.07 | 0.13 | 0.11 | |
| Safety margin | 2.2 m | 1.9 m | 2.1 m | |
| Scenario 5 | Path efficiency | 0.85 | 0.8 | 0.83 |
| Completion time | 160 s | 175 s | 170 s | |
| Collision rate | 0.1 | 0.16 | 0.14 | |
| Safety margin | 2.0 m | 1.6 m | 1.8 m | |
| Scenario 6 | Path efficiency | 0.91 | 0.86 | 0.89 |
| Completion time | 130 s | 145 s | 140 s | |
| Collision rate | 0.06 | 0.11 | 0.09 | |
| Safety margin | 2.4 m | 1.7 m | 2.0 m | |
| Scenario 7 | Path efficiency | 0.89 | 0.83 | 0.89 |
| Completion time | 145 s | 170 s | 140 s | |
| Collision rate | 0.09 | 0.14 | 0.07 | |
| Safety margin | 2.1 m | 1.8 m | 2.3 m | |
| Scenario 8 | Path efficiency | 0.93 | 0.86 | 0.86 |
| Completion time | 115 s | 155 s | 140 s | |
| Collision rate | 0.04 | 0.09 | 0.09 | |
| Safety margin | 2.6 m | 2.1 m | 2.0 m | |
| Scenario 9 | Path efficiency | 0.87 | 0.85 | 0.91 |
| Completion time | 165 s | 150 s | 140 s | |
| Collision rate | 0.11 | 0.12 | 0.09 | |
| Safety margin | 1.9 m | 2.1 m | 2.0 m | |
| Scenario 10 | Path efficiency | 0.92 | 0.88 | 0.86 |
| Completion time | 125 s | 160 s | 140 s | |
| Collision rate | 0.06 | 0.09 | 0.07 | |
| Safety margin | 2.2 m | 2.3 m | 2.3 m |
| Scenario | Algorithm | Waypoints | Path Length (m) |
|---|---|---|---|
| Scenario 1 | D* algorithm | (42.1234, −71.5678)–(42.1236, −71.5682) | 230.5 |
| A* algorithm | (42.1234, −71.5678)–(42.1235, −71.5680)–(42.1236, −71.5682) | 235.2 | |
| RRT* algorithm | (42.1234, −71.5678)–(42.1235, −71.5680)–(42.1236, −71.5682) | 239.1 | |
| Scenario 2 | D* algorithm | (42.1450, −71.5890)–(42.1451, −71.5892) | 189.7 |
| A* algorithm | (42.1450, −71.5890)–(42.1451, −71.5892) | 195.3 | |
| RRT* algorithm | (42.1450, −71.5890)–(42.1451, −71.5892) | 200 | |
| Scenario 3 | D* algorithm | (42.1355, −71.5765)–(42.1357, −71.5767)–(42.1359, −71.5769) | 312.4 |
| A* algorithm | (42.1355, −71.5765)–(42.1357, −71.5767)–(42.1359, −71.5769) | 318.2 | |
| RRT* algorithm | (42.1355, −71.5765)–(42.1357, −71.5767)–(42.1359, −71.5769) | 324 | |
| Scenario 4 | D* algorithm | (42.1200, −71.5600)–(42.1210, −71.5610)–(42.1220, −71.5620) | 421.3 |
| A* algorithm | (42.1200, −71.5600)–(42.1210, −71.5610)–(42.1220, −71.5620) | 428.7 | |
| RRT* algorithm | (42.1200, −71.5600)–(42.1210, −71.5610)–(42.1220, −71.5620) | 433.1 | |
| Scenario 5 | D* algorithm | (42.1300, −71.5700)–(42.1310, −71.5710)–(42.1320, −71.5720) | 315.6 |
| A* algorithm | (42.1300, −71.5700)–(42.1310, −71.5710)–(42.1320, −71.5720) | 321 | |
| RRT* algorithm | (42.1300, −71.5700)–(42.1310, −71.5710)–(42.1320, −71.5720) | 326.4 | |
| Scenario 6 | D* algorithm | (42.1100, −71.5800)–(42.1110, −71.5810)–(42.1120, −71.5820) | 258.7 |
| A* algorithm | (42.1100, −71.5800)–(42.1110, −71.5810)–(42.1120, −71.5820) | 263.5 | |
| RRT* algorithm | (42.1100, −71.5800)–(42.1110, −71.5810)–(42.1120, −71.5820) | 269 | |
| Scenario 7 | D* algorithm | (42.1400, −71.5900)–(42.1410, −71.5910)–(42.1420, −71.5920) | 385.2 |
| A* algorithm | (42.1400, −71.5900)–(42.1410, −71.5910)–(42.1420, −71.5920) | 391.8 | |
| RRT* algorithm | (42.1400, −71.5900)–(42.1410, −71.5910)–(42.1420, −71.5920) | 397.4 | |
| Scenario 8 | D* algorithm | (42.1250, −71.5700)–(42.1255, −71.5710)–(42.1260, −71.5720) | 173.4 |
| A* algorithm | (42.1250, −71.5700)–(42.1255, −71.5710)–(42.1260, −71.5720) | 179.1 | |
| RRT* algorithm | (42.1250, −71.5700)–(42.1255, −71.5710)–(42.1260, −71.5720) | 183.7 | |
| Scenario 9 | D* algorithm | (42.1280, −71.5780)–(42.1285, −71.5790)–(42.1290, −71.5800) | 290.9 |
| A* algorithm | (42.1280, −71.5780)–(42.1285, −71.5790)–(42.1290, −71.5800) | 296.7 | |
| RRT* algorithm | (42.1280, −71.5780)–(42.1285, −71.5790)–(42.1290, −71.5800) | 302.3 | |
| Scenario 10 | D* algorithm | (42.1380, −71.5840)–(42.1385, −71.5850)–(42.1390, −71.5860) | 410.5 |
| A* algorithm | (42.1380, −71.5840)–(42.1385, −71.5850)–(42.1390, −71.5860) | 416.2 | |
| RRT* algorithm | (42.1380, −71.5840)–(42.1385, −71.5850)–(42.1390, −71.5860) | 421.8 |
| Algorithm | Computational Efficiency | Robustness | Adaptability |
|---|---|---|---|
| D* algorithm | Moderate | High | High |
| A* algorithm | Low | Moderate | Moderate |
| RRT* algorithm | Moderate | Moderate | Moderate |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Suanpang, P.; Jamjuntr, P. Optimizing Autonomous UAV Navigation with D* Algorithm for Sustainable Development. Sustainability 2024, 16, 7867. https://doi.org/10.3390/su16177867
Suanpang P, Jamjuntr P. Optimizing Autonomous UAV Navigation with D* Algorithm for Sustainable Development. Sustainability. 2024; 16(17):7867. https://doi.org/10.3390/su16177867
Chicago/Turabian StyleSuanpang, Pannee, and Pitchaya Jamjuntr. 2024. "Optimizing Autonomous UAV Navigation with D* Algorithm for Sustainable Development" Sustainability 16, no. 17: 7867. https://doi.org/10.3390/su16177867