An Empirical Study on the Structural Assurance Mechanism for Trust Building in Autonomous Vehicles Based on the Trust-in-Automation Three-Factor Model


Abstract
:1. Introduction
2. Literature Review
2.1. Structural Assurance
2.1.1. Concept of Structural Assurance
2.1.2. Structural Assurance and Trust
2.2. Trust-in-Automation Three-Factor Model
3. Research Model and Hypotheses
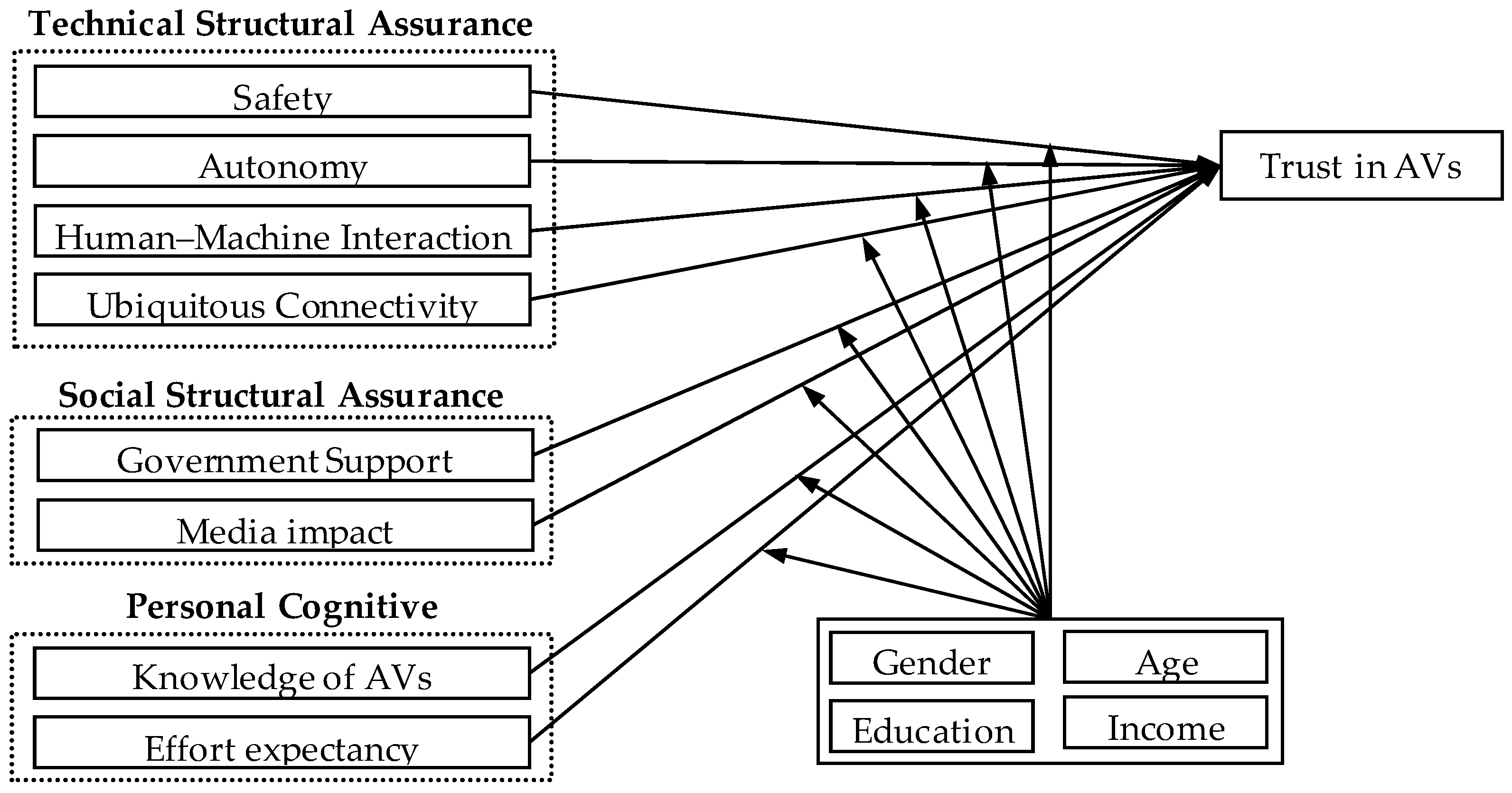
3.1. Research Model
3.2. Hypotheses Development
3.2.1. Technical Structural Assurance and Trust in AVs
3.2.2. Social Structure Assurance and Trust in AVs
3.2.3. Personal Cognitive Factors and Trust in AVs
4. Research Methodology
4.1. Instrument Design
4.2. Data Collection
4.3. Structural Equation Modeling (SEM) Analysis
4.3.1. Measurement Modeling
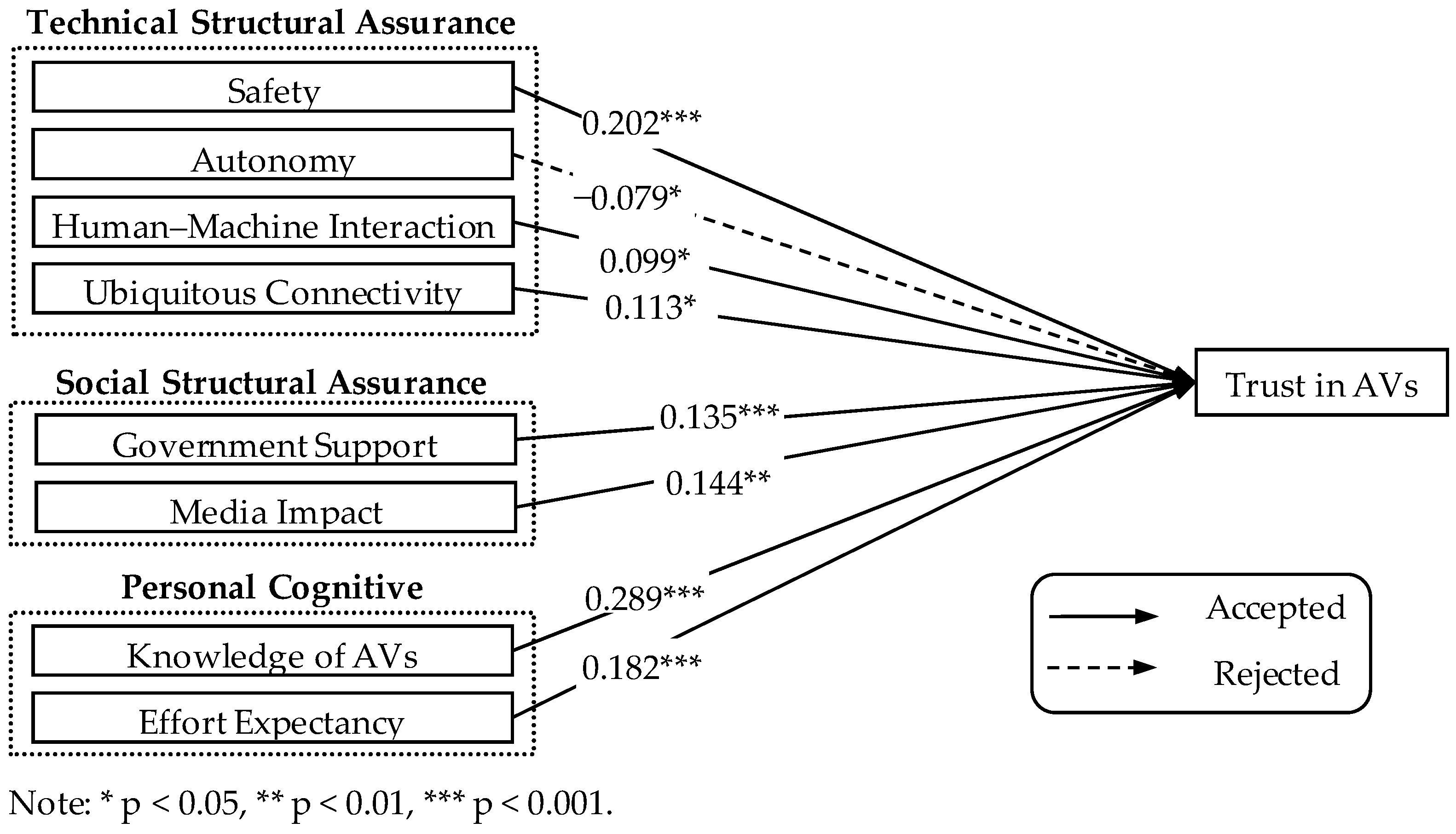
4.3.2. Path Analysis
4.4. Moderating Effect Tests
5. Discussion
5.1. Reflections on the Model
5.2. Theoretical Implications
5.3. Practical Implications
5.4. Limitations and Future Research
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhou, Z.; Yuan, J.; Zhou, S.; Long, Q.; Cai, J.; Zhang, L. Modeling and Analysis of Driving Behaviour for Heterogeneous Traffic Flow Considering Market Penetration under Capacity Constraints. Sustainability 2023, 15, 2923. [Google Scholar] [CrossRef]
- Bahrami, S.; Roorda, M. Autonomous vehicle parking policies: A case study of the City of Toronto. Transp. Res. Part A Policy Pract. 2022, 155, 283–296. [Google Scholar] [CrossRef]
- Virdi, N.; Grzybowska, H.; Waller, S.T.; Dixit, V. A safety assessment of mixed fleets with Connected and Autonomous Vehicles using the Surrogate Safety Assessment Module. Accid. Prev. 2019, 131, 95–111. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.Y.; Christopher, D.W.; Dylan, M.J.; Phillip, L.M. Public perception of autonomous vehicle capability determines judgment of blame and trust in road traffic accidents. Transp. Res. Part A Policy Pract. 2024, 179, 103887. [Google Scholar] [CrossRef]
- Silva, D.; Földes, D.; Csiszár, C. Pick-up Points for Shared Autonomous Vehicle-based Mobility Services in Urban Areas: Demand Calculation and Locating Method. Transp. Res. Procedia 2023, 72, 2628–2635. [Google Scholar] [CrossRef]
- Leminen, S.; Rajahonka, M.; Wendelin, R.; Westerlund, M.; Nyström, A.-G. Autonomous vehicle solutions and their digital servitization business models. Technol. Forecast. Soc. 2022, 185, 122070. [Google Scholar] [CrossRef]
- Petrović, Đ.; Mijailović, R.M.; Pešić, D. Persons with physical disabilities and autonomous vehicles: The perspective of the driving status. Transp. Res. Part A Policy Pract. 2022, 164, 98–110. [Google Scholar] [CrossRef]
- Ehsani, J.P.; Michael, J.P.; Igusa, T.; Mueller, J.; Chang, C.-H.; Yenokyan, G. Advancing Transportation Equity and Safety Through Autonomous Vehicles. Health Equity 2024, 8, 143–146. [Google Scholar] [CrossRef]
- Liao, Y.; Guo, H.; Shi, H. Research on the Public’s Intention to Use Shared Autonomous Vehicles: Based on Social Media Data Mining and Questionnaire Survey. Sustainability 2024, 16, 4462. [Google Scholar] [CrossRef]
- Sun, J.; Yang, Y.K.; Yue, L.S.S.; Han, J.Y.; Wang, Z.J.; Yin, H. Human-machine Cooperative Control Strategy Considering Human-machine Trust Matching. J. Tongji Univ. 2024, 52, 838–845. [Google Scholar] [CrossRef]
- Bruckes, M.; Grotenhermen, J.-G.; Cramer, F.; Schewe, G. Paving the way for the adoption of autonomous driving: Institution-based trust as a critical success factor. In Proceedings of the 27th European Conference on Information Systems, Stockholm and Uppsala, Sweden, 8–14 June 2019; pp. 1–16. [Google Scholar]
- Choi, J.K.; Ji, Y.G. Investigating the Importance of Trust on Adopting an Autonomous Vehicle. Int. J. Hum.-Comput. Int. 2015, 31, 692–702. [Google Scholar] [CrossRef]
- Meyer-Waarden, L.; Cloarec, J. “Baby, you can drive my car”: Psychological antecedents that drive consumers’ adoption of AI-powered autonomous vehicles. Technovation 2022, 109, 102348. [Google Scholar] [CrossRef]
- Kenesei, Z.; Ásványi, K.; Kökény, L.; Jászberényi, M.; Miskolczi, M.; Gyulavári, T.; Syahrivar, J. Trust and perceived risk: How different manifestations affect the adoption of autonomous vehicles. Transp. Res. Part A Policy Pract. 2022, 164, 379–393. [Google Scholar] [CrossRef]
- Kaur, K.; Rampersad, G. Trust in driverless cars: Investigating key factors influencing the adoption of driverless cars. J. Eng. Technol. Manag. 2018, 48, 87–96. [Google Scholar] [CrossRef]
- Chen, Y.; Khan, S.K.; Shiwakoti, N.; Stasinopoulos, P.; Aghabayk, K. Analysis of Australian public acceptance of fully automated vehicles by extending technology acceptance model. Case Stud. Transp. Policy. 2023, 14, 101072. [Google Scholar] [CrossRef]
- Acharya, S.; Mekker, M. Public acceptance of connected vehicles: An extension of the technology acceptance model. Transp. Res. Part F Traffic Psychol. Behav. 2022, 88, 54–68. [Google Scholar] [CrossRef]
- Patel, R.K.; Etminani-Ghasrodashti, R.; Kermanshachi, S.; Rosenberger, J.M.; Foss, A. Exploring willingness to use shared autonomous vehicles. Int. J. Transp. Sci. Technol. 2023, 12, 765–778. [Google Scholar] [CrossRef]
- Zhang, T.; Tao, D.; Qu, X.; Zhang, X.; Lin, R.; Zhang, W. The roles of initial trust and perceived risk in public’s acceptance of automated vehicles. Transp. Res. Part C Emerg. Technol. 2019, 98, 207–220. [Google Scholar] [CrossRef]
- Park, J.; Hong, E.; Le, H.T. Adopting autonomous vehicles: The moderating effects of demographic variables. J. Retail. Consum. Serv. 2021, 63, 102687. [Google Scholar] [CrossRef]
- Cai, L.; Yuen, K.F.; Wang, X. Explore public acceptance of autonomous buses: An integrated model of UTAUT, TTF and trust. Travel Behav. Soc. 2023, 31, 120–130. [Google Scholar] [CrossRef]
- Sun, X.F.; Zhao, Y.; Lyu, C.M. Influencing Mechanism of Human-Computer Interaction Trust in Autonomous Vehicles. J. Northeast. Univ. 2022, 43, 1305–1313. [Google Scholar] [CrossRef]
- Dirsehan, T.; Can, C. Examination of trust and sustainability concerns in autonomous vehicle adoption. Technol. Soc. 2020, 63, 101361. [Google Scholar] [CrossRef]
- Wu, M.; Wang, N.; Yuen, K.F. Can autonomy level and anthropomorphic characteristics affect public acceptance and trust towards shared autonomous vehicles? Technol. Forecast. Soc. 2023, 189, 122384. [Google Scholar] [CrossRef]
- Mcknight, D.H.; Carter, M.; Thatcher, J.B.; Clay, P.F. Trust in a specific technology: An investigation of its components and measures. ACM Trans. Manag. Inf. Syst. 2011, 2, 1–25. [Google Scholar] [CrossRef]
- Li, G.; Liang, Y.; Wang, H.; Chen, J.; Chang, X. Factors Influencing Users’ Willingness to Adopt Connected and Autonomous Vehicles: Net and Configurational Effects Analysis Using PLS-SEM and FsQCA. J. Adv. Transp. 2022, 2022, 7489897. [Google Scholar] [CrossRef]
- Schaefer, K.E.; Chen, J.Y.C.; Szalma, J.L.; Hancock, P.A. A Meta-Analysis of Factors Influencing the Development of Trust in Automation: Implications for Understanding Autonomy in Future Systems. Hum. Factors 2016, 58, 377–400. [Google Scholar] [CrossRef]
- Hancock, P.A.; Billings, D.R.; Schaefer, K.E.; Chen, J.Y.C.; de Visser, E.J.; Parasuraman, R. A Meta-Analysis of Factors Affecting Trust in Human-Robot Interaction. Hum. Factors 2011, 53, 517–527. [Google Scholar] [CrossRef]
- Dong, W.; Fang, W. Trust in automation: Research review and future perspectives. Acta Autom. Sin. 2021, 47, 1183–1200. [Google Scholar] [CrossRef]
- Zucker, L.G. Production of trust: Institutional sources of economic structure. Res. Org. Behav. 1986, 8, 53. [Google Scholar]
- Shapiro, S.P. The Social Control of Impersonal Trust. Am. J. Sociol. 1987, 93, 623–658. [Google Scholar] [CrossRef]
- Wang, X.; Shang, X. Research on the Consumer’s Initial Trust in Online Stores. Lib. Inf. Serv. 2007, 51, 51–53. (In Chinese) [Google Scholar] [CrossRef]
- Lin, J.B.; Lu, Y.B.; Zhang, S.T. Trust Transfers from Online to Mobile Environment: An Empirical Study. Nankai Bus. Rev. 2010, 13, 80–89+100. [Google Scholar] [CrossRef]
- Sassi, A.S.; Hammami, H.; Hafsia, H.B.L. Perceived risk, structural assurance and trust in mobile payments. J. Telecom. Digit. Econ. 2022, 10, 41–50. [Google Scholar] [CrossRef]
- Koester, N.; Salge, O. Building trust in intelligent automation: Insights into structural assurance mechanisms for autonomous vehicles. In Proceedings of the Forty-First International Conference on Information Systems, Hyderabad, India, 13–16 December 2020; pp. 1–17. [Google Scholar]
- Xie, H.; David, A.; Mamun, M.R.A.; Prybutok, V.R.; Sidorova, A. The formation of initial trust by potential passengers of self-driving taxis. J. Decis. Syst. 2023, 32, 326–355. [Google Scholar] [CrossRef]
- McKnight, D.H.; Cummings, L.L.; Chervany, N.L. Initial Trust Formation in New Organizational Relationships. Acad. Manag. Rev. 1998, 23, 473–490. [Google Scholar] [CrossRef]
- Kim, K.K.; Prabhakar, B. Initial trust and the adoption of B2C e-commerce: The case of internet banking. SIGMIS Database 2004, 35, 50–64. [Google Scholar] [CrossRef]
- Sporleder, T.L.; Goldsmith, P.D. Alternative Firm Strategies for Signaling Quality in the Food System. Can. J. Agric. Econ. 2001, 49, 591–604. [Google Scholar] [CrossRef]
- Shao, B.J.; Yang, L.H. Comparative Study on the Antecedents of Internet Banking Adoption among Different Groups in China. J. Manag. Eng. 2008, 22, 86–92. [Google Scholar] [CrossRef]
- Shao, Z.; Guo, Y.; Li, X.; Barnes, S. Sources of influences on customers’ trust in ride-sharing: Why use experience matters? Ind. Manag. Data Syst. 2020, 120, 1459–1482. [Google Scholar] [CrossRef]
- Hanif, M.S.; Shao, Y.F.; Hanif, M.I.; Afzal, F. Mobile shopping continuance intentions of expats in China: Influence of structural assurance and the stay duration. Int. J. Mob. Commun. 2022, 20, 541–567. [Google Scholar] [CrossRef]
- Liu, H.; Yang, R.; Wang, L.; Liu, P. Evaluating Initial Public Acceptance of Highly and Fully Autonomous Vehicles. Int. J. Hum-Comput. Int. 2019, 35, 919–931. [Google Scholar] [CrossRef]
- Maeng, K.; Cho, Y. Who will want to use shared autonomous vehicle service and how much? A consumer experiment in South Korea. Travel Behav. Soc. 2022, 26, 9–17. [Google Scholar] [CrossRef]
- Gold, C.; Körber, M.; Hohenberger, C.; Lechner, D.; Bengler, K. Trust in Automation—Before and After the Experience of Take-over Scenarios in a Highly Automated Vehicle. Procedia Manuf. 2015, 3, 3025–3032. [Google Scholar] [CrossRef]
- Fang, Y.; Xu, Y.; Zhang, J.; Cui, W. Design Factors of Shared Situation Awareness Interface in Human–Machine Co-Driving. Information 2022, 13, 437. [Google Scholar] [CrossRef]
- Lee, J.D.; See, K.A. Trust in Automation: Designing for Appropriate Reliance. Hum. Factors 2004, 46, 50–80. [Google Scholar] [CrossRef]
- Reichenbach, J.; Onnasch, L.; Manzey, D. Human Performance Consequences of Automated Decision Aids in States of Sleep Loss. Hum. Factors 2011, 53, 717–728. [Google Scholar] [CrossRef]
- Upadhyaya, N.; Galizzi, M.M. In bot we trust? Personality traits and reciprocity in human-bot trust games. Front. Behav. Econ. 2023, 2, 1164259. [Google Scholar] [CrossRef]
- Molina, N.; Navas, F.; González, D.; Mahtout, I.; Milanés, V. Impressions after an automated mobility experience: An acceptance study. Transp. Res. Part F 2021, 81, 27–40. [Google Scholar] [CrossRef]
- de Visser, E.J.; Krueger, F.; McKnight, P.; Scheid, S.; Smith, M.; Chalk, S.; Parasuraman, R. The World is not Enough: Trust in Cognitive Agents. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2012, 56, 263–267. [Google Scholar] [CrossRef]
- Large, D.R.; Burnett, G.E. The effect of different navigation voices on trust and attention while using in-vehicle navigation systems. J. Safety Res. 2014, 49, 69.e1–75. [Google Scholar] [CrossRef]
- Thill, S.; Riveiro, M.; Lagerstedt, E.; Lebram, M.; Hemeren, P.; Habibovic, A.; Klingegård, M. Driver adherence to recommendations from support systems improves if the systems explain why they are given: A simulator study. Transp. Res. Part F Traffic Psychol. Behav. 2018, 56, 420–435. [Google Scholar] [CrossRef]
- Matthews, G.; Lin, J.; Panganiban, A.R.; Long, M.D. Individual Differences in Trust in Autonomous Robots: Implications for Transparency. IEEE Trans. Hum. Mach. Syst. 2020, 50, 234–244. [Google Scholar] [CrossRef]
- Yan, G.; Wen, D.; Olariu, S.; Weigle, M.C. Security challenges in vehicular cloud computing. IEEE Trans. Intell. Transp. Syst. 2013, 14, 284–294. [Google Scholar] [CrossRef]
- Perkins, L.; Miller, J.E.; Hashemi, A.; Burns, G. Designing for Human-Centered Systems: Situational Risk as a Factor of Trust in Automation. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2010, 54, 2130–2134. [Google Scholar] [CrossRef]
- Galdon Clavell, G.; Frowd, P.M. Using Societal Impact Assessment (SIA) to Improve Technological Development in the Field of Crime Prevention. In Social Informatics; Springer: Cham, Switzerland, 2015; pp. 118–124. [Google Scholar] [CrossRef]
- Madhavan, P.; Wiegmann, D.A. Effects of Information Source, Pedigree, and Reliability on Operators’ Utilizaton of Diagnostic Advice. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2005, 49, 487–491. [Google Scholar] [CrossRef]
- Papadoulis, A.; Quddus, M.; Imprialou, M. Evaluating the safety impact of connected and autonomous vehicles on motorways. Accid. Prev. 2019, 124, 12–22. [Google Scholar] [CrossRef]
- Vander Laan, Z.; Sadabadi, K.F. Operational performance of a congested corridor with lanes dedicated to autonomous vehicle traffic. Int. J. Transp. Sci. Technol. 2017, 6, 42–52. [Google Scholar] [CrossRef]
- Combs, T.S.; Sandt, L.S.; Clamann, M.P.; McDonald, N.C. Automated Vehicles and Pedestrian Safety: Exploring the Promise and Limits of Pedestrian Detection. Am. J. Prev. Med. 2019, 56, 1–7. [Google Scholar] [CrossRef]
- Lustgarten, P.; Le Vine, S. Public priorities and consumer preferences for selected attributes of automated vehicles. J. Mod. Transp. 2018, 26, 72–79. [Google Scholar] [CrossRef]
- Beer, J.M.; Fisk, A.D.; Rogers, W.A. Toward a framework for levels of robot autonomy in human-robot interaction. J. Hum. Robot Interact. 2014, 3, 74–99. [Google Scholar] [CrossRef]
- Hoff, K.A.; Bashir, M. Trust in Automation: Integrating Empirical Evidence on Factors That Influence Trust. Hum. Factors 2014, 57, 407–434. [Google Scholar] [CrossRef]
- Verberne, F.M.F.; Ham, J.; Midden, C.J.H. Trust in Smart Systems: Sharing Driving Goals and Giving Information to Increase Trustworthiness and Acceptability of Smart Systems in Cars. Hum. Factors 2012, 54, 799–810. [Google Scholar] [CrossRef]
- Tan, Z.; Dai, N.; Zhang, R.; Dai, K. Overview and perspectives on human-computer interaction in intelligent and connected vehicles. Comput. Integr. Manuf. Syst. 2020, 26, 2615–2632. (In Chinese) [Google Scholar] [CrossRef]
- Tavani, H.T. Levels of Trust in the Context of Machine Ethics. Philos. Technol. 2015, 28, 75–90. [Google Scholar] [CrossRef]
- Qin, B.; Chen, X.; Qu, S. The Impacts of Autonomous Vehicle on the Cities and Planning Responses: A Literature Review Based on Ripple Effect Mode. Int. Urban Plan. 2019, 34, 108–114. [Google Scholar] [CrossRef]
- Falcao, R.P.Q.; Ferreira, J.B.; Filho, M.C.M.d.C. The influence of ubiquitous connectivity, trust, personality and generational effects on mobile tourism purchases. Inf. Technol. Tour. 2019, 21, 483–514. [Google Scholar] [CrossRef]
- Adnan, N.; Md Nordin, S.; bin Bahruddin, M.A.; Ali, M. How trust can drive forward the user acceptance to the technology? In-vehicle technology for autonomous vehicle. Transp. Res. Part A Policy Pract. 2018, 118, 819–836. [Google Scholar] [CrossRef]
- Samuel, C.; Sabreena, A.; Lynette, C. Understanding Shared Autonomous Vehicle Preferences: A Comparison between Shuttles, Buses, Ridesharing and Taxis. Sustainability 2022, 14, 13656. [Google Scholar] [CrossRef]
- Anania, E.C.; Rice, S.; Walters, N.W.; Pierce, M.; Winter, S.R.; Milner, M.N. The effects of positive and negative information on consumers’ willingness to ride in a driverless vehicle. Transp. Policy 2018, 72, 218–224. [Google Scholar] [CrossRef]
- Jing, P.; Cai, Y.; Yang, J.C. Listen to social media users: Mining chinese public perception of automated vehicles after crashes. Transp. Res. Part F Traffic Psychol. Behav. 2023, 93, 248–265. [Google Scholar] [CrossRef]
- Alambeigi, H.; Smith, A.; Wei, R.; McDonald, A.; Arachie, C.; Huang, B. A Novel Approach to Social Media Guideline Design and Its Application to Automated Vehicle Events. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2021, 65, 1510–1514. [Google Scholar] [CrossRef]
- Du, H.; Zhu, G.; Zheng, J. Why travelers trust and accept self-driving cars: An empirical study. Travel Behav. Soc. 2021, 22, 1–9. [Google Scholar] [CrossRef]
- Ghasri, M.; Akshay, V. The potential impact of media commentary and social influence on consumerpreferences for driverless cars. Transp. Res. Part C Emerg. Technol. 2021, 127, 103132. [Google Scholar] [CrossRef]
- Hergeth, S.; Lorenz, L.; Vilimek, R.; Krems, J.F. Keep Your Scanners Peeled: Gaze Behavior as a Measure of Automation Trust During Highly Automated Driving. Hum. Factors 2016, 58, 509–519. [Google Scholar] [CrossRef]
- Boelhouwer, A.; van den Beukel, A.P.; van der Voort, M.C.; Martens, M.H. Should I take over? Does system knowledge help drivers in making take-over decisions while driving a partially automated car? Transp. Res. Part F Traffic Psychol. Behav. 2019, 60, 669–684. [Google Scholar] [CrossRef]
- Jing, P.; Huang, H.; Ran, B.; Zhan, F.; Shi, Y. Exploring the Factors Affecting Mode Choice Intention of Autonomous Vehicle Based on an Extended Theory of Planned Behavior—A Case Study in China. Sustainability 2019, 11, 1155. [Google Scholar] [CrossRef]
- Liu, M.; Wu, J.; Zhu, C.; Hu, K. Factors Influencing the Acceptance of Robo-Taxi Services in China: An Extended Technology Acceptance Model Analysis. J. Adv. Transp. 2022, 2022, 8461212. [Google Scholar] [CrossRef]
- Chayomchai, A. The online technology acceptance model of generation-Z people in Thailand during COVID-19 crisis. Manag. Mark. 2020, 15, 496–512. [Google Scholar] [CrossRef]
- Choudhury, A.; Asan, O.; Medow, J.E. Effect of risk, expectancy, and trust on clinicians’ intent to use an artificial intelligence system—Blood Utilization Calculator. Appl. Ergon. 2022, 101, 103708. [Google Scholar] [CrossRef]
- Chin, W.W.; Marcolin, B.L.; Newsted, P.R. A Partial Least Squares Latent Variable Modeling Approach for Measuring Interaction Effects: Results from a Monte Carlo Simulation Study and an Electronic-Mail Emotion/Adoption Study. Inf. Syst. Res. 2003, 14, 189–217. [Google Scholar] [CrossRef]
- KPMG. 2020 Autonomous Vehicles Readiness Index. 2020. Available online: https://assets.kpmg/content/dam/kpmg/xx/pdf/2020/07/2020-autonomous-vehicles-readiness-index.pdf (accessed on 1 September 2022).

{kind=link}
{kind=link}
| Constructs | Description | References |
|---|---|---|
| Safety | AVs can reduce the occurrence of accidents. AVs has the ability to cope with unexpected situations. AVs can drive safely even at night or in poor weather. AVs can ensure personal and private data security. | [11,61] |
| Autonomy | AVs can independently provide me with an action plan. AVs can independently complete travel tasks. AVs can ensure autonomous travel through advanced technology. AVs can optimize routes in real-time to ensure safe and efficient travel. | [24,65] |
| Human –Machine Interaction | AVs can provide comprehensive and timely feedback on vehicle travel information. AVs can timely and accurate reception and execution of travel instructions. AVs’ human–machine interaction can be highly anthropomorphic and easy to understand and operate. AVs can quickly hand over control of the vehicle to me in case of emergency. | [51,66] |
| Ubiquitous Connectivity | Ubiquitous connectivity can obtain vehicle information and monitor vehicle status at any time. Ubiquitous connectivity can help the vehicle arrive at the commanded location in time and accurately. Ubiquitous connectivity can accurately maintain the distance between vehicles to ensure safe travel. Ubiquitous connectivity can capture real-time road traffic conditions in a timely manner. | [4,26] |
| Government Support | I will use AVs if the government provides some supportive cost subsidies. I will use AVs if the government develops a sound legal system. I will use AVs if the government can develop a comprehensive insurance system. I will use AVs if the government invests in relevant infrastructure (road facilities, information systems, signals). | [41,79] |
| Media Impact | I frequently see reports on AVs in various media. I frequently see reports on the intelligent travel of AVs in various media. I frequently see reports on the safe travel of AVs in various media. I frequently see reports on the current state of development of AVs in various media | [73,75] |
| Knowledge of AVs | I know the current status of AV technology development. I know the advantages of AVs such as improving travel safety, reduced traffic accidents, increased mobility, energy savings, etc. I know the AV Robotaxi trial run information. I know the current state of the development of AVs. | [78,79] |
| Effort Expectancy | I think the AV driving environment is easy to adapt to. I think AVs are easy to use. I think AVs are easy to interact with. | [64,70] |
| Trust | I trust that AVs can drive on their own without my assistance. I trust AVs can be safe and reliable in bad weather conditions. I trust AVs’ driving skills more than my own. I trust AVs can make my trip go smoothly. | [24,43] |
| Items | Types | Numbers | Percentage (%) |
|---|---|---|---|
| Gender | Male | 247 | 45.1% |
| Female | 301 | 54.9% | |
| Age | 18–25 years old | 138 | 25.2% |
| 26–30 years old | 193 | 35.2% | |
| 31–35 years old | 92 | 16.8% | |
| 36–40 years old | 78 | 14.2% | |
| 41–50 years old | 28 | 5.1% | |
| Above 50 years old | 19 | 3.5% | |
| Education level | High school graduates | 46 | 8.4% |
| Junior colleges | 149 | 27.2% | |
| Four-year colleges | 281 | 51.3% | |
| Graduate schools and above | 72 | 13.1% | |
| Average monthly income | Below USD 1000 | 98 | 17.9% |
| USD 1000~USD 1500 | 211 | 38.5% | |
| USD 1500~USD 2000 | 134 | 24.5% | |
| USD 2000~USD 2500 | 83 | 15.1% | |
| More than USD 2500 | 22 | 4% |
| Construct | Items | λ | CR | AVE | α |
|---|---|---|---|---|---|
| Safety (SAF) | SAF1 | 0.840 | 0.848 | 0.583 | 0.846 |
| SAF2 | 0.691 | ||||
| SAF3 | 0.747 | ||||
| SAF4 | 0.768 | ||||
| Autonomy (AUTO) | AUTO1 | 0.737 | 0.804 | 0.506 | 0.802 |
| AUTO2 | 0.705 | ||||
| AUTO3 | 0.678 | ||||
| AUTO4 | 0.724 | ||||
| HMI | HMI1 | 0.784 | 0.841 | 0.57 | 0.841 |
| HMI2 | 0.708 | ||||
| HMI3 | 0.746 | ||||
| HMI4 | 0.779 | ||||
| Ubiquitous Connectivity (UC) | UC1 | 0.855 | 0.879 | 0.645 | 0.875 |
| UC2 | 0.800 | ||||
| UC3 | 0.709 | ||||
| UC4 | 0.841 | ||||
| Government Support (GS) | GS1 | 0.833 | 0.883 | 0.654 | 0.882 |
| GS2 | 0.780 | ||||
| GS3 | 0.776 | ||||
| GS4 | 0.844 | ||||
| Media Impact (MI) | MI1 | 0.813 | 0.818 | 0.531 | 0.812 |
| MI2 | 0.739 | ||||
| MI3 | 0.634 | ||||
| MI4 | 0.716 | ||||
| Knowledge of AVs (KN) | KN1 | 0.823 | 0.864 | 0.614 | 0.863 |
| KN2 | 0.738 | ||||
| KN3 | 0.758 | ||||
| KN4 | 0.811 | ||||
| Effort Expectancy (EE) | EE1 | 0.828 | 0.830 | 0.621 | 0.826 |
| EE2 | 0.720 | ||||
| EE3 | 0.811 | ||||
| Trust (TRU) | TRU1 | 0.786 | 0.844 | 0.576 | 0.844 |
| TRU2 | 0.769 | ||||
| TRU3 | 0.772 | ||||
| TRU4 | 0.705 |
| SAF | AUTO | HMI | UC | GS | MI | KN | EE | TRU | |
|---|---|---|---|---|---|---|---|---|---|
| SAF | 0.764 | ||||||||
| AUTO | −0.287 | 0.711 | |||||||
| HMI | 0.298 | −0.265 | 0.755 | ||||||
| UC | 0.430 | −0.322 | 0.341 | 0.803 | |||||
| GS | 0.276 | −0.235 | 0.215 | 0.385 | 0.809 | ||||
| MI | 0.340 | −0.282 | 0.300 | 0.387 | 0.338 | 0.729 | |||
| KN | 0.396 | −0.198 | 0.292 | 0.422 | 0.393 | 0.268 | 0.784 | ||
| EE | 0.284 | −0.202 | 0.288 | 0.368 | 0.329 | 0.395 | 0.223 | 0.788 | |
| TRU | 0.497 | −0.341 | 0.406 | 0.533 | 0.475 | 0.462 | 0.540 | 0.450 | 0.759 |
| Path | β | S.E. | C.R. | p-Value | Hypothesis | |||
|---|---|---|---|---|---|---|---|---|
| H1 | Trust | <--- | SAF | 0.202 | 0.041 | 4.68 | *** | Accepted |
| H2 | Trust | <--- | AUTO | −0.079 | 0.045 | −2.012 | 0.044 | Rejected |
| H3 | Trust | <--- | HMI | 0.099 | 0.042 | 2.522 | 0.012 | Accepted |
| H4 | Trust | <--- | UC | 0.113 | 0.047 | 2.525 | 0.012 | Accepted |
| H5 | Trust | <--- | GS | 0.135 | 0.04 | 3.323 | *** | Accepted |
| H6 | Trust | <--- | MI | 0.144 | 0.05 | 3.281 | 0.001 | Accepted |
| H7 | Trust | <--- | KN | 0.289 | 0.041 | 6.542 | *** | Accepted |
| H8 | Trust | <--- | EE | 0.182 | 0.044 | 4.315 | *** | Accepted |
| Group | Subgroup | Group Size |
|---|---|---|
| Gender | Male | 301 |
| Female | 247 | |
| Age | less than 30 years old | 331 |
| more than 30 years old | 217 | |
| Education Level | Less than a bachelor’s degree | 195 |
| Bachelor’s degree or above | 353 | |
| Monthly income | less than USD 1500 | 309 |
| USD 1500 or more | 239 |
| Group | Relationship | β0 | t | β1 | t | CR | ||
|---|---|---|---|---|---|---|---|---|
| Male (0) vs. Female (1) | SAF | → | Trust | 0.253 | 4.132 *** | 0.26 | 4.596 *** | −0.389 |
| AUTO | → | Trust | 0.041 | 0.824 | −0.326 | −4.877 *** | −4.387 | |
| HMI | → | Trust | 0.081 | 1.429 | 0.114 | 2.43 * | −0.07 | |
| UC | → | Trust | 0.114 | 1.667 | 0.151 | 2.993 * | 0.168 | |
| GS | → | Trust | 0.117 | 2.155 * | 0.218 | 3.919 *** | 0.842 | |
| MI | → | Trust | 0.14 | 2.441 * | 0.103 | 1.747 | −0.87 | |
| KN | → | Trust | 0.249 | 4.199 *** | 0.209 | 3.579 *** | −0.884 | |
| EE | → | Trust | 0.263 | 4.665 *** | 0.114 | 2.113 * | −2.449 | |
| Less than 30 years old (0) vs. More than 30 years old (1) | SAF | → | Trust | 0.199 | 3.471 *** | 0.209 | 3.388 *** | 0.092 |
| AUTO | → | Trust | 0.036 | 0.613 | −0.112 | −2.057 * | −1.813 | |
| HMI | → | Trust | 0.143 | 2.883 ** | 0.06 | 0.955 | −0.714 | |
| UC | → | Trust | 0.228 | 4.032 *** | 0.058 | 0.796 | −1.505 | |
| GS | → | Trust | 0.16 | 3.141 ** | 0.09 | 1.436 | −0.642 | |
| MI | → | Trust | 0.102 | 1.627 | 0.196 | 3.225 ** | −1.493 | |
| KN | → | Trust | 0.243 | 4.505 *** | 0.368 | 5.259 *** | 2.126 | |
| EE | → | Trust | 0.28 | 5.184 *** | 0.134 | 1.989 * | −0.951 | |
| Less than a bachelor’s degree (0) vs. Bachelor’s degree or above (1) | SAF | → | Trust | 0.224 | 4.355 *** | 0.088 | 1.083 | −1.565 |
| AUTO | → | Trust | −0.07 | −1.705 | −0.444 | −2.428 * | −2.106 | |
| HMI | → | Trust | 0.108 | 2.456 * | 0.046 | 0.577 | −0.779 | |
| UC | → | Trust | 0.063 | 1.254 | 0.157 | 1.518 | −0.868 | |
| GS | → | Trust | 0.163 | 3.557 *** | 0.103 | 1.072 | −0.701 | |
| MI | → | Trust | 0.114 | 2.432 * | 0.181 | 1.445 | −0.491 | |
| KN | → | Trust | 0.302 | 5.804 *** | 0.062 | 0.662 | −2.216 | |
| EE | → | Trust | 0.258 | 5.399 *** | −0.075 | −0.724 | −2.937 | |
| Less than USD 1500 (0) vs. USD 1500 or More (1) | SAF | → | Trust | 0.148 | 3.213 *** | 0.268 | 3.64 *** | 1.314 |
| AUTO | → | Trust | 0.081 | 1.684 | −0.117 | −1.892 * | −2.515 | |
| HMI | → | Trust | 0.129 | 3.079 ** | 0.08 | 1.136 | −0.412 | |
| UC | → | Trust | 0.253 | 5.098 *** | 0.022 | 0.293 | −2.568 | |
| GS | → | Trust | 0.095 | 1.956 | 0.155 | 2.366 * | 0.733 | |
| MI | → | Trust | 0.237 | 3.48 *** | 0.11 | 1.736 | −1.237 | |
| KN | → | Trust | 0.366 | 7.719 *** | 0.227 | 2.79 ** | −0.65 | |
| EE | → | Trust | 0.282 | 5.387 *** | 0.117 | 1.789 | −1.445 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Y.; Wang, Y.; Liu, J.; Lee, K. An Empirical Study on the Structural Assurance Mechanism for Trust Building in Autonomous Vehicles Based on the Trust-in-Automation Three-Factor Model. Sustainability 2024, 16, 8258. https://doi.org/10.3390/su16188258
Yang Y, Wang Y, Liu J, Lee K. An Empirical Study on the Structural Assurance Mechanism for Trust Building in Autonomous Vehicles Based on the Trust-in-Automation Three-Factor Model. Sustainability. 2024; 16(18):8258. https://doi.org/10.3390/su16188258
Chicago/Turabian StyleYang, Yanlu, Yiyuan Wang, Jun Liu, and Kidong Lee. 2024. "An Empirical Study on the Structural Assurance Mechanism for Trust Building in Autonomous Vehicles Based on the Trust-in-Automation Three-Factor Model" Sustainability 16, no. 18: 8258. https://doi.org/10.3390/su16188258