

Multi-Objective Planning of Commuter Carpooling under Time-Varying Road Network

Abstract
:1. Introduction
2. Literature Review
2.1. Research on Path Optimization
2.2. Research on Algorithm Design
3. Methodology
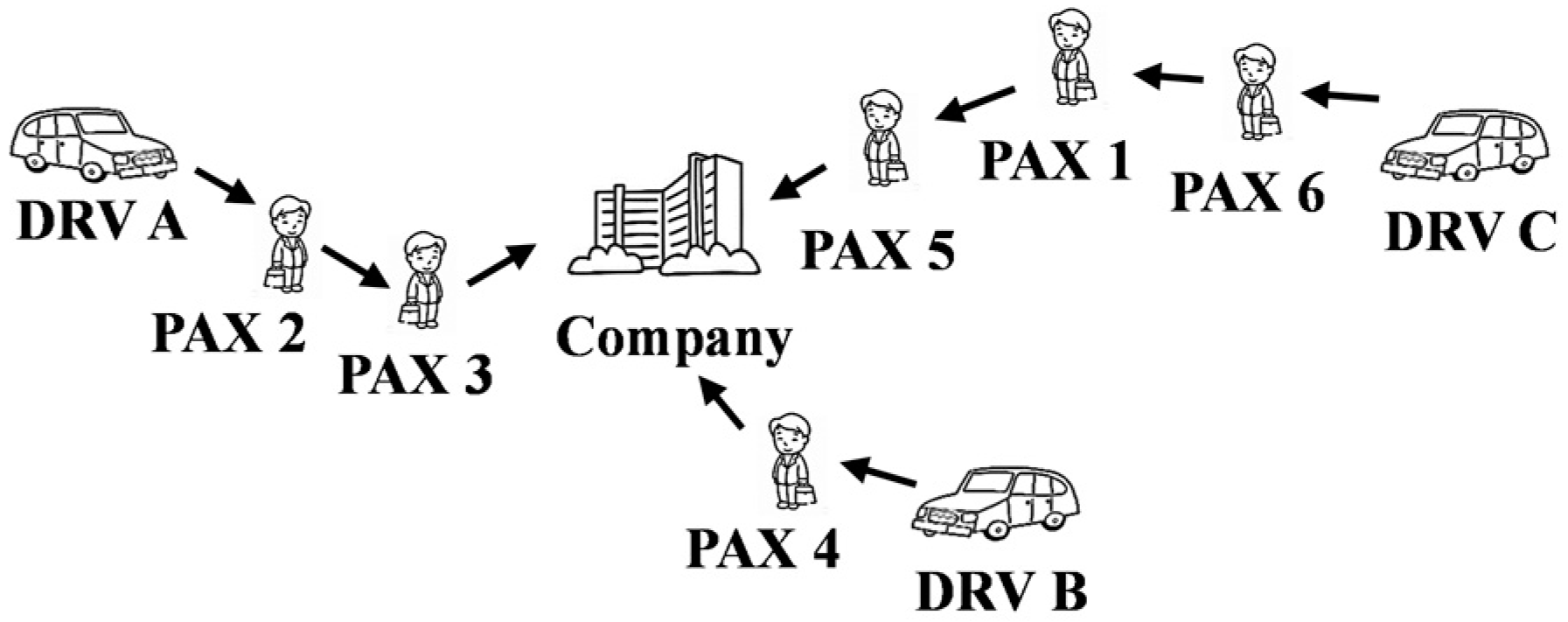
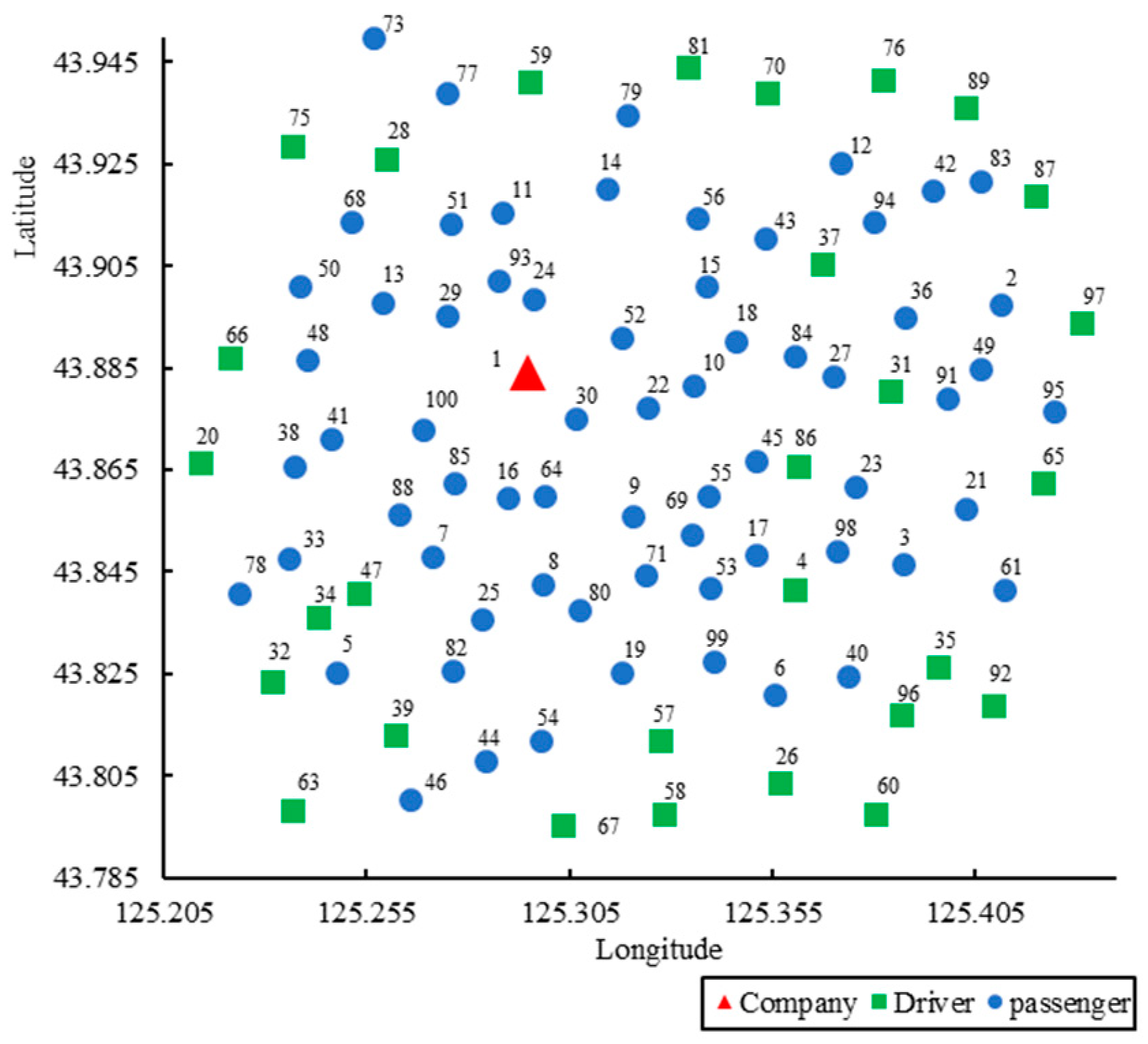
3.1. Scenario Description
- (1)
- Each passenger can only be served by one vehicle;
- (2)
- The geographic location, time window and other information of the ride participants are known;
- (3)
- Considering the comfort, the maximum driver–passenger capacity of the shared vehicle is set as 4 persons;
- (4)
- Passengers shall wait at the boarding point in advance as agreed, and the passengers can be picked up when the vehicle arrives, ignoring the parking start time of the vehicle and the boarding and alighting time of passengers;
- (5)
- The performance of carpool vehicles is similar, and the driving speed changes with time.
3.2. Related Terms
- (1)
- Carpool
- (2)
- Rideshare
- (3)
- Ride-hailing
3.3. Model Building
3.3.1. Dynamic Travel Time Determination
- (1)
- If , the vehicle k arrives at the node before without crossing the time period, and the travel time can be obtained by calculating the upper limit of the integral according to and the speed function relation in the period of ;
- (2)
- If , it means that the vehicle k runs across time periods between node and node . Assuming that the distance traveled across time periods in each period is , the travel time between two nodes is expressed as . is the travel time of vehicle k in the period, which can be obtained by calculating the upper limit of the integral according to and the speed function relation in the period of .
3.3.2. Objective Function
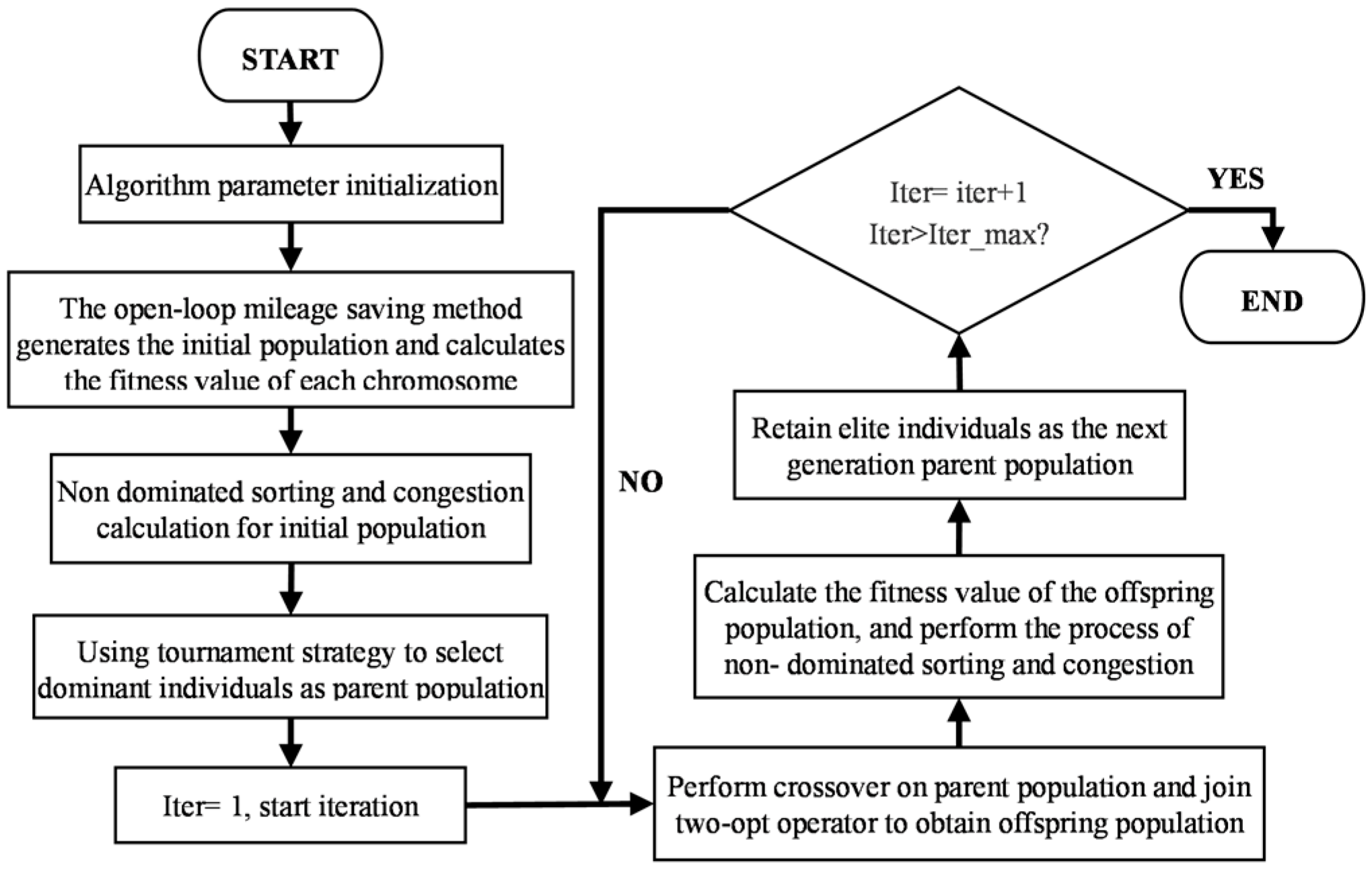
3.4. INSGA-II Algorithm
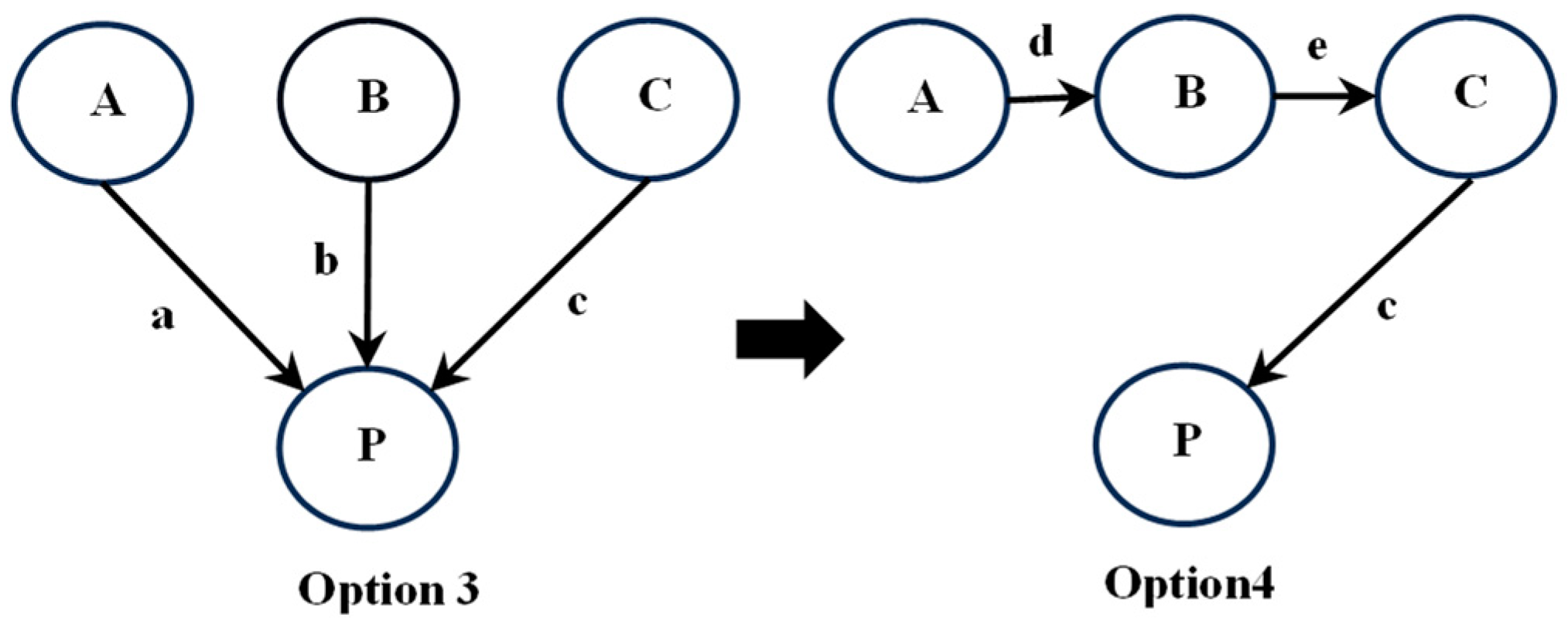
3.4.1. Open-Loop Saving Algorithm
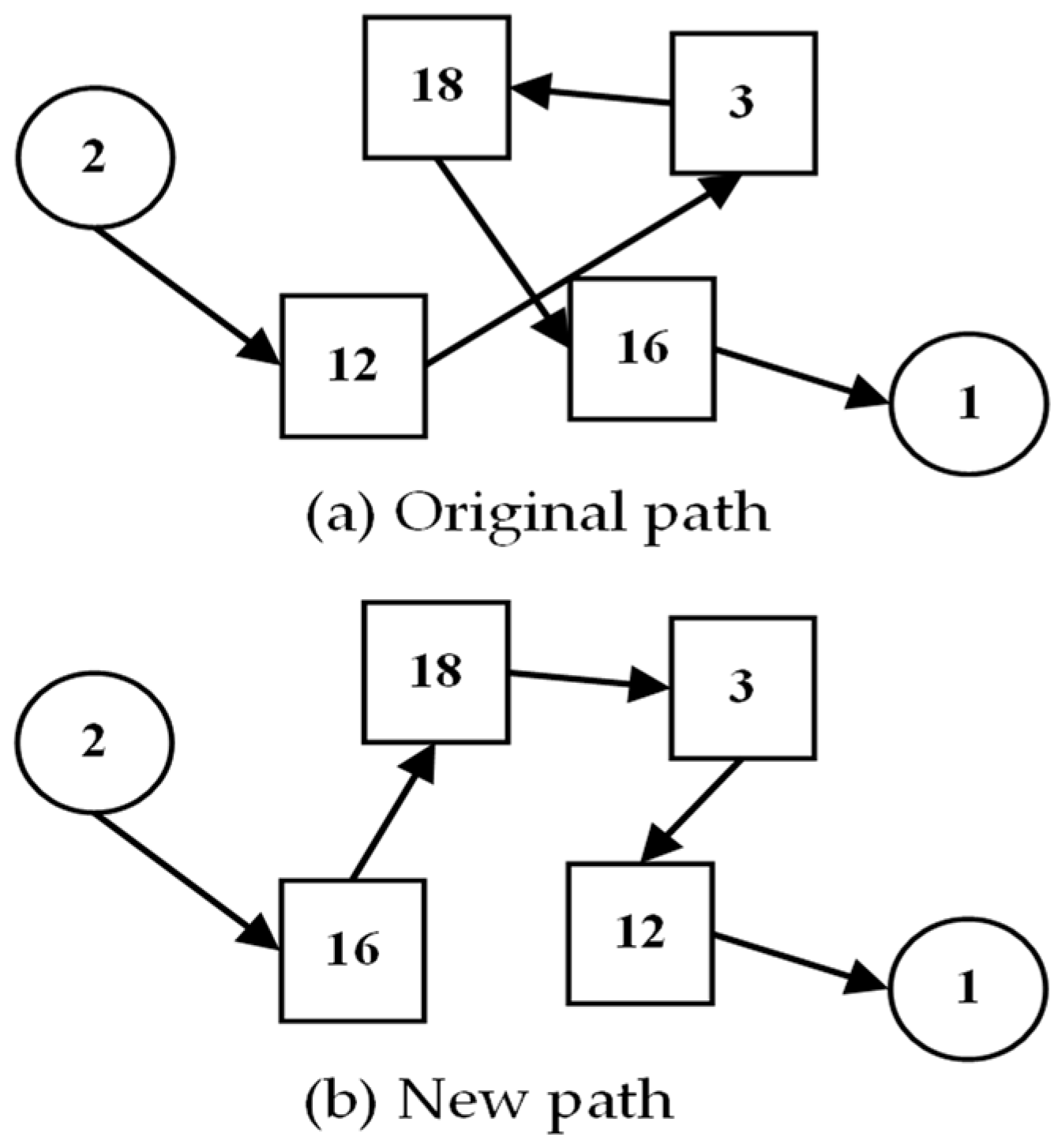
3.4.2. 2-Opt Local Search
4. Experimental Studies
4.1. Experimental Setting
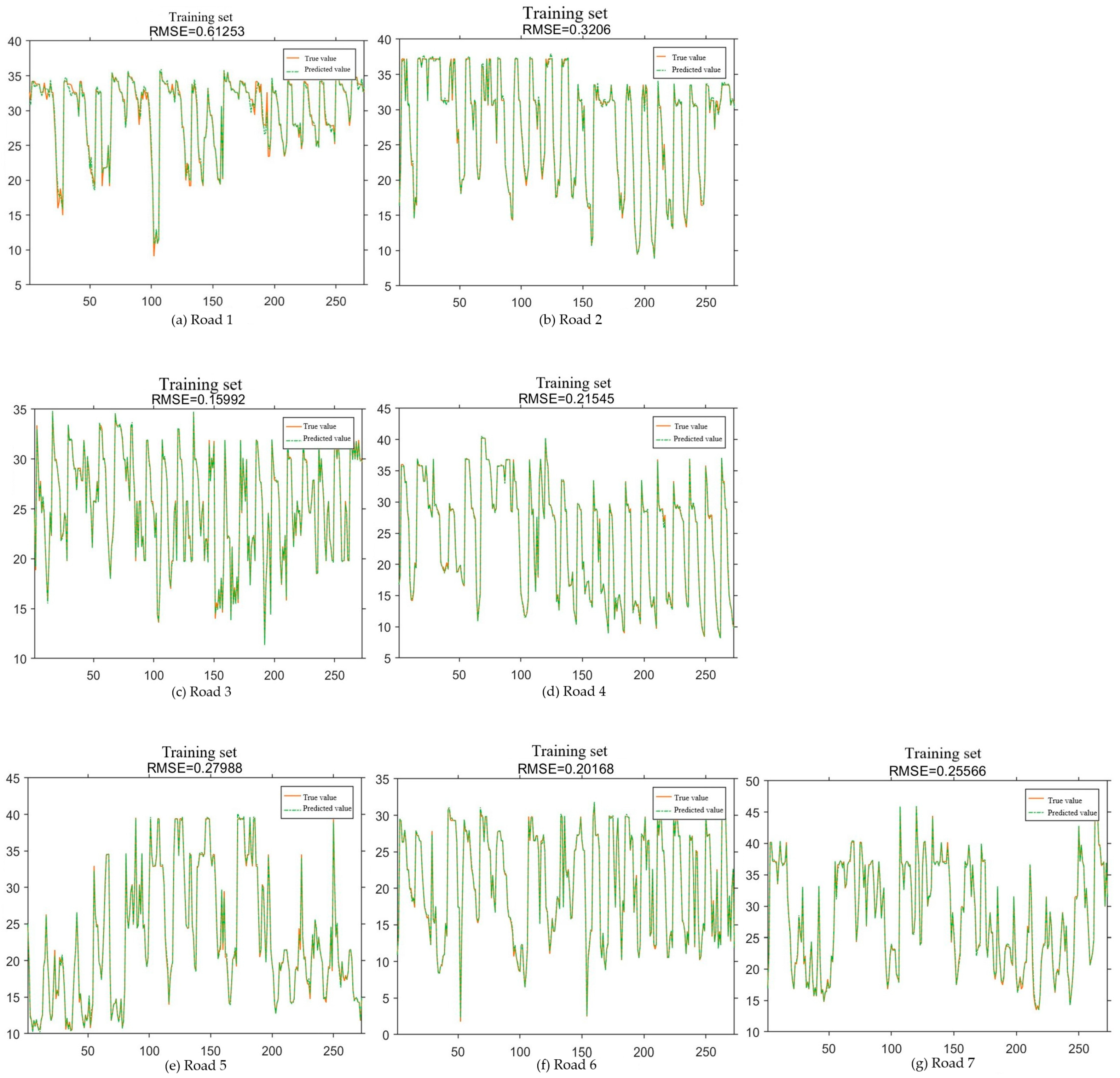
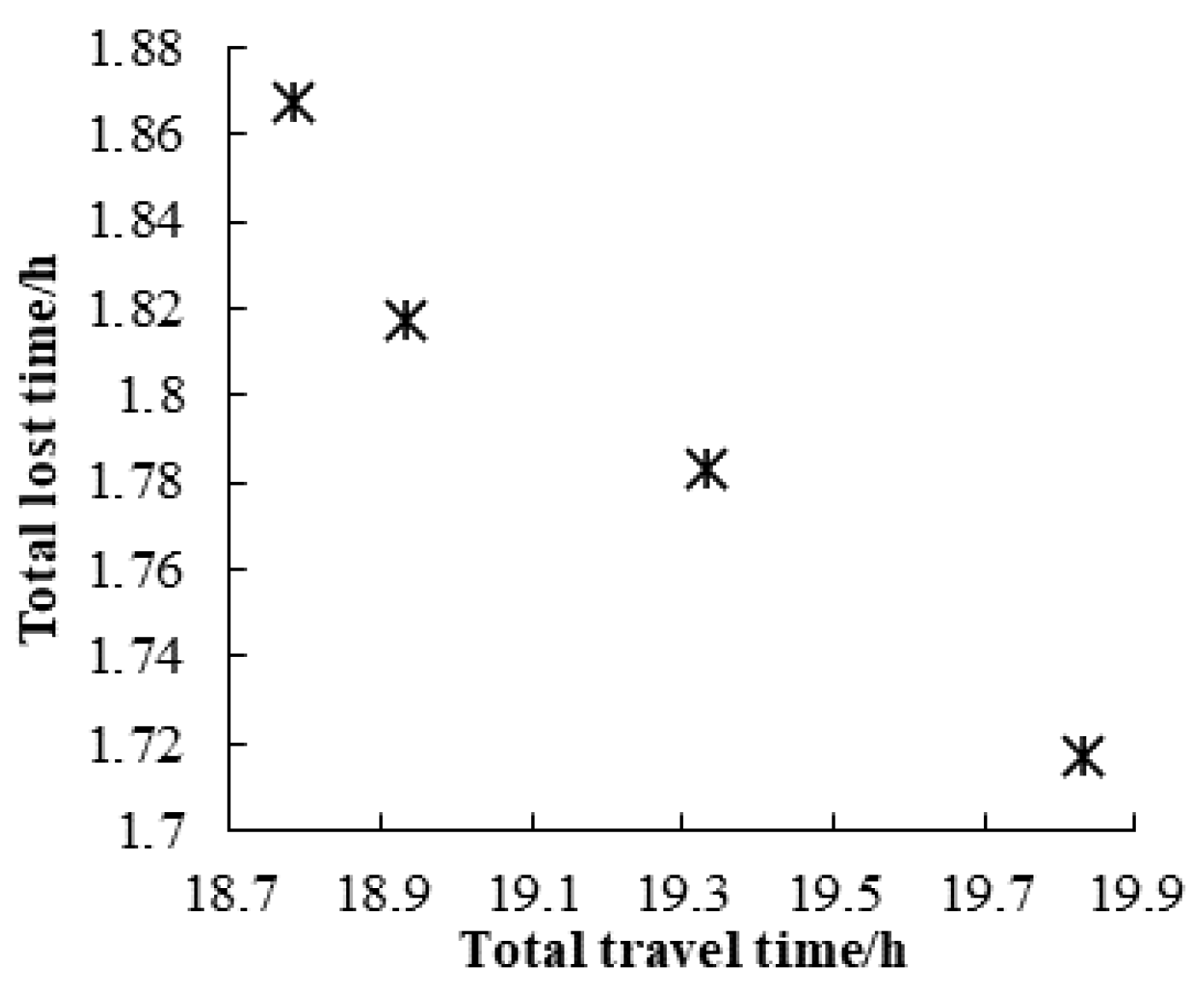
4.2. Analysis of Results
4.3. Speed Sensitivity Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xia, C.J.; Liu, C. Towards 2035: Changes in the world economic situation and China’s economic outlook. Globalization 2022, 1, 58–69+135. [Google Scholar] [CrossRef]
- Konishi, H.; Mun, S.I. Carpooling and congestion pricing: HOV and HOT lanes. Reg. Sci. Urban Econ. 2010, 40, 173–186. [Google Scholar] [CrossRef]
- Liu, D.H. Regulatory framework for on-line car sharing. Stud. Law Bus. 2020, 37, 16–29. [Google Scholar] [CrossRef]
- Silva, E.; Ramos, A.G.; Moura, M. Pallets delivery: Two matheuristics for combined loading and routing. Expert Syst. Appl. 2024, 243, 122893. [Google Scholar] [CrossRef]
- Zhang, W.; Li, H.; Yang, W.; Zhang, G.; Gen, M. Hybrid multiobjective evolutionary algorithm considering combination timing for multi-type vehicle routing problem with time windows. Comput. Ind. Eng. 2022, 171, 108435. [Google Scholar] [CrossRef]
- Tebaldi, L.; Murino, T.; Bottani, E. An adapted version of the water wave optimization algorithm for the capacitated vehicle routing problem with time windows with application to a real case using probe data. Sustainability 2020, 12, 3666. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, Q.; Li, J.; Zhang, Y.; Chen, Z.; Lei, Z. Collaborated eco-routing optimization for continuous traffic flow based on energy consumption difference of multiple vehicles. Energy 2023, 274, 127277. [Google Scholar] [CrossRef]
- Liu, J.; Jiang, R.; Li, X.; Jia, B.; Liu, Z. Lane-based multi-class vehicle collaborative evacuation management. Transp. B 2022, 10, 184–206. [Google Scholar] [CrossRef]
- Wang, H.; Wang, J.C.; Liu, W.M.; Wang, Z.F.; Wang, Y.H.; Xu, Y.X. Research on heterogeneous fleet vehicle routing optimization based on low carbon emission. Value Eng. 2019, 38, 80–82. [Google Scholar] [CrossRef]
- Naderipour, M.; Alinaghian, M. Measurement, evaluation and minimization of CO2, NOx, and CO emissions in the open time dependent vehicle routing problem. Measurement 2016, 90, 443–452. [Google Scholar] [CrossRef]
- Xiao, Q.; He, R.-C. Carpooling scheme selection for taxi carpooling passengers: A multi-objective model and optimization algorithm. Arch. Transp. 2017, 42, 85–92. [Google Scholar] [CrossRef]
- He, S.X.; Zhao, H.G. Dispatching of taxi pooling based on route optimization pattern. J. Changsha Univ. Sci. Technol. Nat. Sci. 2018, 15, 14–20+34. [Google Scholar]
- Yan, L.; Luo, X.; Zhu, R.; Santi, P.; Wang, H.; Wang, D.; Zhang, S.; Ratti, C. Quantifying and analyzing traffic emission reductions from ridesharing: A case study of Shanghai. Transp. Res. Part D Transp. Environ. 2020, 89, 102629. [Google Scholar] [CrossRef]
- Hu, Z.K.; Yuan, P.C.; Gao, H.Z. An optimization model for online car-hailing ride-sharing based on vehicle type considering the optimal meeting location. Logist. Technol. 2022, 45, 20. [Google Scholar]
- Zhu, C.; Ye, D.; Zhu, T.; Zhou, W. Time-optimal and privacy preserving route planning for carpool policy. World Wide Web 2022, 25, 1151–1168. [Google Scholar] [CrossRef]
- Yuan, Z.; Chen, S.; Wu, Y.; Li, H.; Xiao, Q. Robust optimization of carpooling routing problem under travel time uncertainty. Transp. Syst. Eng. Inf. 2022, 22, 233–242. [Google Scholar]
- Lotfi, S.; Abdelghany, K. Ride matching and vehicle routing for on-demand mobility services. J. Heuristics 2022, 28, 235–258. [Google Scholar] [CrossRef]
- Li, S.S. Analysis of dynamic vehicle routing problem based on improved greedy algorithm. Mod. Econ. Inf. 2017, 1, 337. [Google Scholar]
- Filcek, G.; Żak, J. The multiple criteria optimization problem of joint matching carpoolers and common route planning. Adv. Intell. Syst. Comput. 2017, 523, 225–236. [Google Scholar]
- Wu, X.S. Research on Dynamic Taxi Sharing Matching Optimization Algorithm. Master’s Thesis, Chang’an University, Xi’an, China, 2018. [Google Scholar]
- Coindreau, M.; Gallay, O.; Zufferey, N. Vehicle routing with transportable resources: Using carpooling and walking for on-site services. Eur. J. Oper. Res. 2019, 279, 996–1010. [Google Scholar] [CrossRef]
- Ding, Y.J.; Zhang, K.; Zhang, L.Y.; Lu, H.P. Optimization of personnel commuting and riding path based on genetic gray wolf optimizer. Mod. Inf. Technol. 2023, 7, 112–115. [Google Scholar] [CrossRef]
- Lu, W.; Quadrifoglio, L.; Lee, D.; Zeng, X. The ridesharing problem without predetermined drivers and riders: Formulation and heuristic. Transp. Lett. 2023, 15, 969–979. [Google Scholar] [CrossRef]
- Gong, W.H.; Zhang, K. Hybrid algorithm of improved genetic and neural network for colleague carpooling. Comput. Appl. Softw. 2023, 40, 60–64+116. [Google Scholar]
- Li, Y.D.; Hao, Z.B.; Lei, H. Survey of convolutional neural network. J. Comput. Appl. 2016, 36, 2508–2515. [Google Scholar]
- Fang, J.X.; Li, Q.; Zhu, Y.J.; Hou, J.X.; Feng, X. A spatio-temporal prediction framework for air pollution based on deep RNN. Sci. Surv. Map. 2017, 42, 76–83. [Google Scholar]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multi-objective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182. [Google Scholar] [CrossRef]
- Zhang, X.F.; Wang, X.Y. Comprehensive review of grey wolf optimization on algorithm. Comput. Sci. 2019, 46, 30–38. [Google Scholar]
- Wang, Z.L.; Zhou, Q.; Wang, Q.X. Research on vehicle distribution route optimization based on mileage saving method. Logist. Sci. Tech. 2023, 46, 14–17+23. [Google Scholar] [CrossRef]
- Sun, J.; Liu, S.Z.; Wu, X. Simulated annealing algorithm based on large neighborhood search to solve TSP. Comput. Simul. 2023, 40, 415–420. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Types | Symbols | Explanation |
|---|---|---|
| sets | K = {2, …, k} | Vehicles’ departure nodes set in the area |
| G = {2, …, g} | Passengers boarding nodes set in the area | |
| H = K∪G = {2, …, k + g} | Drivers’ and passengers’ departure nodes set | |
| N = {1}∪H = {1, 2, …, k + g} | Drivers’ and passengers’ departure and destination nodes set | |
| K = {2, …, k} | Vehicles’ departure nodes set in the area | |
| parameters | ak | Number of passengers in the k-th vehicle |
| i, j, p, g ∈ N | Nodes at any position in the area | |
| M | Time interval | |
| dij | Actual distance between node i and j (km) | |
| tij | Travel time of vehicle from node i to j (h) | |
| vij | Vehicle travel speed from node i to j (km/h) | |
| tik | The moment when the k-th vehicle leaves the i-th node | |
| OTh | Departure time when the h-th participant does not carpool | |
| STk | Departure time of the k-th vehicle | |
| ATk | Arrival time of the k-th vehicle | |
| Lhc | Ride distance of the h-th carpool participant | |
| Lh | Ride distance of the h-th participant who does not carpool | |
| θ | Elasticity coefficient of acceptable detour distance for all participants | |
| LT | Latest arrival time at the company, this paper is set to 8:20 | |
| decision variables | Xijk | |
| Yik |
| D | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 91 | 92 | 93 | 94 | 95 | 96 | 97 | 98 | 99 | 100 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| O | |||||||||||||||||||||
| 1 | 0 | 11.9 | 11.0 | 9.8 | 9.1 | 11.2 | 5.7 | 7.3 | 6.3 | 4.3 | 9.7 | 15.6 | 3.6 | 9.0 | 12.5 | 14.5 | 12.9 | 9.3 | 9.1 | 4.1 | |
| 2 | 11.2 | 0 | 7.5 | 10.1 | 20.5 | 12.8 | 21.8 | 14.7 | 16.0 | 7.7 | 3.9 | 10.6 | 11.6 | 4.5 | 4.3 | 11.9 | 2.2 | 8.3 | 13.6 | 14.4 | |
| 3 | 10.8 | 8.3 | 0 | 2.8 | 13.0 | 5.5 | 10.8 | 7.7 | 10.2 | 7.8 | 4.3 | 4.7 | 12.8 | 8.7 | 6.8 | 5.7 | 9.1 | 1.8 | 6.1 | 12.2 | |
| 4 | 9.0 | 10.7 | 3.2 | 0 | 10.0 | 4.1 | 7.8 | 5.0 | 7.2 | 6.6 | 7.3 | 7.0 | 12.1 | 10.2 | 9.6 | 6.0 | 12 | 2.2 | 3.1 | 10.5 | |
| 5 | 8.8 | 20.5 | 12.9 | 10.6 | 0 | 9.9 | 4.1 | 5.5 | 4.4 | 13.4 | 16.9 | 15.5 | 11.8 | 19.9 | 18.7 | 13.8 | 21.7 | 11.7 | 8.2 | 7.6 | |
| 6 | 11.6 | 14.7 | 5.5 | 3.4 | 9.7 | 0 | 9.7 | 7.1 | 9.3 | 9.2 | 9.5 | 4.9 | 14.7 | 12.7 | 10.7 | 3.3 | 14.1 | 4.3 | 3.9 | 12.8 | |
| 7 | 5.4 | 17.1 | 10.2 | 8.5 | 4.1 | 10.6 | 0 | 3.0 | 1.0 | 8.2 | 12.3 | 14.3 | 8.5 | 16.7 | 14.5 | 13.8 | 19.0 | 8.5 | 7.5 | 3.9 | |
| 8 | 7.1 | 15.7 | 7.6 | 5.5 | 5.4 | 7.6 | 3.3 | 0 | 2.7 | 8.0 | 10.9 | 11.3 | 10.2 | 14.7 | 14.1 | 10.1 | 18.3 | 6.5 | 4.6 | 6.0 | |
| 9 | 6.0 | 16.8 | 9.9 | 7.9 | 4.4 | 9.8 | 1.0 | 2.5 | 0 | 7.9 | 11.9 | 13.7 | 9.3 | 16.4 | 14.2 | 13.4 | 16.5 | 8.2 | 6.9 | 4.9 | |
| 10 | 4.1 | 8.2 | 8.2 | 7.3 | 11.8 | 10 | 8.1 | 6.9 | 7.6 | 0 | 6.0 | 13.6 | 5.5 | 6.7 | 8.7 | 12.2 | 9.1 | 6.4 | 7.0 | 7.1 | |
| 91 | 9.7 | 4.0 | 4.2 | 6.7 | 16.5 | 9.5 | 12.6 | 11.1 | 12.1 | 5.9 | 0 | 7.4 | 10.9 | 5.5 | 3.1 | 8.7 | 4.5 | 5.0 | 9.6 | 12.7 | |
| 92 | 15.4 | 11.1 | 4.4 | 6.4 | 15.4 | 4.7 | 14.2 | 11.3 | 13.6 | 13.2 | 7.0 | 0 | 19.2 | 11.9 | 8.0 | 2.4 | 10.3 | 6.2 | 8.4 | 17.3 | |
| 93 | 2.8 | 11.7 | 15.9 | 12.2 | 11.1 | 16.6 | 8.4 | 9.4 | 8.5 | 4.9 | 10.7 | 21.1 | 0 | 9.3 | 13.4 | 19.5 | 14.1 | 14.2 | 11.7 | 4.9 | |
| 94 | 9.3 | 5.1 | 8.7 | 9.4 | 19.7 | 12.4 | 16.3 | 13.4 | 15.5 | 6.2 | 6.2 | 13.4 | 8.6 | 0 | 9.1 | 12.5 | 6.9 | 7.8 | 11.9 | 14.8 | |
| 95 | 11.9 | 3.6 | 6.4 | 8.9 | 18.6 | 10.5 | 15.6 | 13.7 | 15.0 | 8.1 | 3.8 | 8.4 | 13.1 | 7.7 | 0 | 10.0 | 3.0 | 7.4 | 11.6 | 14.9 | |
| 96 | 15.5 | 12.6 | 5.1 | 5.1 | 13.3 | 3.2 | 13.1 | 10.2 | 12.6 | 11.7 | 9.2 | 4.2 | 18.7 | 12 | 11.2 | 0 | 13.5 | 5.0 | 6.9 | 15.8 | |
| 97 | 13.5 | 2.2 | 9.0 | 11.5 | 21.1 | 13.0 | 18.7 | 16.7 | 18.1 | 9.0 | 4.7 | 11.1 | 14.2 | 6.1 | 3.5 | 12.4 | 0 | 10.4 | 14.1 | 18.4 | |
| 98 | 9.0 | 8.8 | 1.7 | 1.7 | 11.7 | 4.6 | 8.8 | 6.6 | 8.3 | 6.0 | 5.1 | 6.6 | 11 | 8.1 | 7.5 | 6.1 | 9.8 | 0 | 5.0 | 10.4 | |
| 99 | 9.8 | 14.4 | 6.7 | 4.5 | 9.8 | 3.0 | 7.8 | 4.9 | 7.3 | 8.0 | 10.4 | 7.4 | 13.0 | 13.7 | 12.6 | 5.8 | 15.6 | 5.6 | 0 | 10.5 | |
| 100 | 3.7 | 14.9 | 12.1 | 11.0 | 7.4 | 12.9 | 4.0 | 5.5 | 4.7 | 7.5 | 12.3 | 17.3 | 5.2 | 12.6 | 15.1 | 15.7 | 15.4 | 10.4 | 10.1 | 0 |
| Passenger Number | Starting Coordinate (Longitude and Latitude) | Node Number | Departure Time without Ridesharing |
|---|---|---|---|
| 1 | (125.4113, 43.8975) | 2 | 7:30 |
| 2 | (125.3872, 43.8465) | 3 | 7:35 |
| 3 | (125.2477, 43.8255) | 5 | 7:45 |
| 4 | (125.3555, 43.8209) | 6 | 7:35 |
| 5 | (125.2712, 43.8481) | 7 | 8:00 |
| 6 | (125.2985, 43.8428) | 8 | 7:50 |
| 7 | (125.3205, 43.8560) | 9 | 8:00 |
| 8 | (125.3355, 43.8817) | 10 | 8:05 |
| 9 | (125.2884, 43.9156) | 11 | 7:40 |
| 10 | (125.3718, 43.9253) | 12 | 7:55 |
| 11 | (125.2588, 43.8980) | 13 | 8:05 |
| 12 | (125.3143, 43.9202) | 14 | 7:50 |
| 13 | (125.3389, 43.9010) | 15 | 7:55 |
| 14 | (125.2895, 43.8596) | 16 | 7:45 |
| 15 | (125.3508, 43.8484) | 17 | 7:35 |
| 16 | (125.3458, 43.8904) | 18 | 8:00 |
| 17 | (125.3179, 43.8254) | 19 | 7:45 |
| 18 | (125.4025, 43.8575) | 21 | 7:55 |
| 19 | (125.3241, 43.8773) | 22 | 7:40 |
| 20 | (125.3755, 43.8617) | 23 | 8:05 |
| 21 | (125.2961, 43.8986) | 24 | 8:05 |
| 22 | (125.2834, 43.8357) | 25 | 7:55 |
| 23 | (125.3702, 43.8834) | 27 | 7:40 |
| 24 | (125.2748, 43.8954) | 29 | 7:55 |
| 25 | (125.3064, 43.8750) | 30 | 7:35 |
| 26 | (125.2359, 43.8478) | 33 | 8:00 |
| 27 | (125.3879, 43.8948) | 36 | 7:40 |
| 28 | (125.2371, 43.8656) | 38 | 7:45 |
| 29 | (125.3739, 43.8247) | 40 | 7:45 |
| 30 | (125.2462, 43.8712) | 41 | 7:50 |
| 31 | (125.3947, 43.9198) | 42 | 7:30 |
| 32 | (125.3534, 43.9104) | 43 | 7:55 |
| 33 | (125.2843, 43.8078) | 44 | 8:00 |
| 34 | (125.3510, 43.8669) | 45 | 7:55 |
| 35 | (125.2659, 43.8004) | 46 | 8:05 |
| 36 | (125.2402, 43.8866) | 48 | 7:40 |
| 37 | (125.4065, 43.8847) | 49 | 7:35 |
| 38 | (125.2387, 43.9010) | 50 | 7:50 |
| 39 | (125.2756, 43.9134) | 51 | 7:45 |
| 40 | (125.3181, 43.8910) | 52 | 7:40 |
| 41 | (125.3397, 43.8419) | 53 | 7:55 |
| 42 | (125.2978, 43.8121) | 54 | 7:35 |
| 43 | (125.3394, 43.8599) | 55 | 7:35 |
| 44 | (125.3366, 43.9143) | 56 | 8:05 |
| 45 | (125.4124, 43.8417) | 61 | 7:30 |
| 46 | (125.3065, 43.9540) | 62 | 7:55 |
| 47 | (125.2989, 43.8598) | 64 | 7:50 |
| 48 | (125.2511, 43.9137) | 68 | 8:00 |
| 49 | (125.3352, 43.8522) | 69 | 7:35 |
| 50 | (125.3239, 43.8443) | 71 | 7:45 |
| 51 | (125.3707, 43.9534) | 72 | 7:20 |
| 52 | (125.2564, 43.9499) | 73 | 7:50 |
| 53 | (125.3924, 43.9578) | 74 | 7:50 |
| 54 | (125.2749, 43.9392) | 77 | 7:45 |
| 55 | (125.2236, 43.8410) | 78 | 7:55 |
| 56 | (125.3191, 43.9347) | 79 | 7:55 |
| 57 | (125.3076, 43.8374) | 80 | 7:40 |
| 58 | (125.2761, 43.8257) | 82 | 7:50 |
| 59 | (125.4063, 43.9216) | 83 | 8:05 |
| 60 | (125.3604, 43.8875) | 84 | 7:50 |
| 61 | (125.2767, 43.8626) | 85 | 7:30 |
| 62 | (125.2629, 43.8564) | 88 | 7:40 |
| 63 | (125.4180, 43.9532) | 90 | 7:30 |
| 64 | (125.3984, 43.8791) | 91 | 7:30 |
| 65 | (125.2877, 43.9021) | 93 | 8:05 |
| 66 | (125.3800, 43.9136) | 94 | 7:40 |
| 67 | (125.4245, 43.8764) | 95 | 7:30 |
| 68 | (125.3712, 43.8491) | 98 | 7:35 |
| 69 | (125.3407, 43.8274) | 99 | 7:45 |
| 70 | (125.2689, 43.8729) | 100 | 8:05 |
| Vehicle Number | Starting Coordinate (Longitude and Latitude) | Node Number | Departure Time without Ridesharing |
|---|---|---|---|
| 1 | (125.3607, 43.8417) | 4 | 7:45 |
| 2 | (125.2138, 43.8663) | 20 | 7:45 |
| 3 | (125.3568, 43.8035) | 26 | 7:35 |
| 4 | (125.2600, 43.9262) | 28 | 7:50 |
| 5 | (125.3841, 43.8806) | 31 | 7:30 |
| 6 | (125.2316, 43.8236) | 32 | 7:35 |
| 7 | (125.2431, 43.8362) | 34 | 7:55 |
| 8 | (125.3958, 43.8262) | 35 | 7:30 |
| 9 | (125.3673, 43.9054) | 37 | 7:40 |
| 10 | (125.2621,43.8129) | 39 | 7:40 |
| 11 | (125.2532, 43.8408) | 47 | 7:55 |
| 12 | (125.3276, 43.8118) | 57 | 7:45 |
| 13 | (125.3282, 43.7975) | 58 | 7:40 |
| 14 | (125.2951, 43.9411) | 59 | 7:55 |
| 15 | (125.3806, 43.7975) | 60 | 7:20 |
| 16 | (125.2368, 43.7983) | 63 | 7:35 |
| 17 | (125.4216, 43.8623) | 65 | 7:30 |
| 18 | (125.2212, 43.8872) | 66 | 7:55 |
| 19 | (125.3035, 43.7953) | 67 | 7:35 |
| 20 | (125.3537, 43.9390) | 70 | 7:30 |
| 21 | (125.2368, 43.9287) | 75 | 7:45 |
| 22 | (125.3821, 43.9416) | 76 | 7:40 |
| 23 | (125.334, 43.9439) | 81 | 7:40 |
| 24 | (125.3614, 43.8659) | 86 | 7:50 |
| 25 | (125.4202, 43.9187) | 87 | 7:30 |
| 26 | (125.4028, 43.9360) | 89 | 7:40 |
| 27 | (125.4094, 43.8187) | 92 | 7:15 |
| 28 | (125.3867, 43.8168) | 96 | 7:25 |
| 29 | (125.4314, 43.8938) | 97 | 7:35 |
| Parameter Names | Settings |
|---|---|
| Maximum carrying capacity | 4 |
| Initial population | 40 |
| Maximum iterations | 500 |
| Crossover probability | 0.90 |
| Mutation probability | 0.08 |
| Latest arrival time of employees | 8:20 |
| Section | Multiplicative Path | Total Travel Time/h | Total Lost Time/h |
|---|---|---|---|
| 1 | 75-73-77-1; 28-68-51-93-1 59-11-24-1; 81-79-14-1 70-56-52-1; 76-43-1 89-12-1; 87-83-42-94-1 37-15-1; 97-49-2-36-1 31-27-84-18-1; 65-95-91-1 86-45-10-1; 92-61-21-23-1 35-3-98-1; 4-22-1; 66-50-13-1 96-40-17-1; 60-6-55-1 26-99-53-69-1; 58-71-9-30-1 57-19-80-64-1; 67-54-82-25-1 39-46-44-8-1; 63-5-7-16-1 47-88-85-1; 34-33-100-1 32-78-38-41-1; 20-48-29-1 | 18.78 | 1.87 |
| 2 | 97-2-36-84-1; 65-95-49-91-1 86-45-55-30-1; 31-27-10-22-1 76-12-43-15-1; 37-18-52-1 70-56-1; 81-79-14-24-1 87-83-42-1; 89-42-94-1 92-61-21-23-1; 35-3-98-1 4-17-69-9-1; 96-40-53-1 60-6-1; 26-99-71-1; 59-11-93-1 57-19-80-64-1; 58-8-16-1 67-54-44-1; 63-46-82-25-1 39-7-85-1; 20-38-41-1 32-78-33-1; 47-88-100-1 34-5-1; 28-73-77-51-1 75-68-29-1; 66-48-50-1 | 19.33 | 1.78 |
| 3 | 81-79-14-24-1; 70-56-52-1 31-27-84-1; 97-91-30-1 76-12-43-15-1; 39-46-82-1 86-45-55-1; 4-17-69-9-1 37-18-10-22-1; 59-11-93-1 65-95-49-1; 35-3-23-1 92-61-21-1; 96-40-98-1 60-6-53-1; 26-99-71-1 57-19-80-64-1; 58-8-16-1 63-5-7-1; 89-42-83-94-1 67-44-54-25-1; 20-41-38-1 32-78-33-1; 66-50-48-13-1 34-88-100-1; 75-68-51-29-1 28-73-77-1; 47-85-1; 87-2-36-1 | 19.84 | 1.72 |
| 4 | 32-5-7-85-1; 63-46-44-1 39-82-25-16-1; 67-54-8-64-1 26-99-1; 58-80-1; 35-98-55-1 4-17-69-30-1; 60-6-1 92-61-3-1; 65-21-23-1 97-95-91-49-1; 20-41-38-78-1 34-33-48-29-1; 59-24-1 81-79-14-1; 66-50-13-93-1 75-73-77-11-1; 28-68-51-1 96-40-53-1; 31-27-84-18-1 87-2-36-1; 89-42-83-94-1 76-12-43-1; 86-45-10-22-1 37-15-52-1; 70-56-1 47-88-100-1; 57-19-71-9-1 | 18.91 | 1.82 |
| Section | Total Travel Distance/km | Reduced Distance/km | Total Travel Time/h | Reduced Time/h | ||
|---|---|---|---|---|---|---|
| Non-Carpooling | Carpooling | Non-Carpooling | Carpooling | |||
| 1 | 926.7 | 396.6 | 530.1 | 55.75 | 18.78 | 36.97 |
| 2 | 926.7 | 409.1 | 517.6 | 55.75 | 19.33 | 36.42 |
| 3 | 926.7 | 417.8 | 508.9 | 55.75 | 19.84 | 35.91 |
| 4 | 926.7 | 400.4 | 526.3 | 55.75 | 18.91 | 36.84 |
| Road Name | Number of Pareto Solutions | Optimal Value of Total Lost Time/h | Optimal Value of Total Travel Time/h |
|---|---|---|---|
| Road 1 | 5 | 1.83 | 19.22 |
| Road 2 | 4 | 1.79 | 19.56 |
| Road 3 | 4 | 1.72 | 18.78 |
| Road 4 | 3 | 1.82 | 18.66 |
| Road 5 | 4 | 1.67 | 17.54 |
| Road 6 | 4 | 1.61 | 17.89 |
| Road 7 | 5 | 1.78 | 19.45 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Zhang, H.; Liu, H.; Wang, S. Multi-Objective Planning of Commuter Carpooling under Time-Varying Road Network. Sustainability 2024, 16, 647. https://doi.org/10.3390/su16020647
Li J, Zhang H, Liu H, Wang S. Multi-Objective Planning of Commuter Carpooling under Time-Varying Road Network. Sustainability. 2024; 16(2):647. https://doi.org/10.3390/su16020647
Chicago/Turabian StyleLi, Jin, Hongping Zhang, Huasheng Liu, and Shiyan Wang. 2024. "Multi-Objective Planning of Commuter Carpooling under Time-Varying Road Network" Sustainability 16, no. 2: 647. https://doi.org/10.3390/su16020647