
Assessing User Acceptance of Automated Vehicles as a Precondition for Their Contribution to a More Sustainable Mobility

Abstract
:1. Introduction
2. Background
3. Methodology
3.1. Survey Design and Scope
- Sociodemographics
- Travel patterns and experiences
- Driving profiles
- General safety perceptions
- Safety perceptions with regard to AV
- Affinity for technology
- Willingness-to-adopt questions
3.2. Data Analyses
4. Results and Discussion
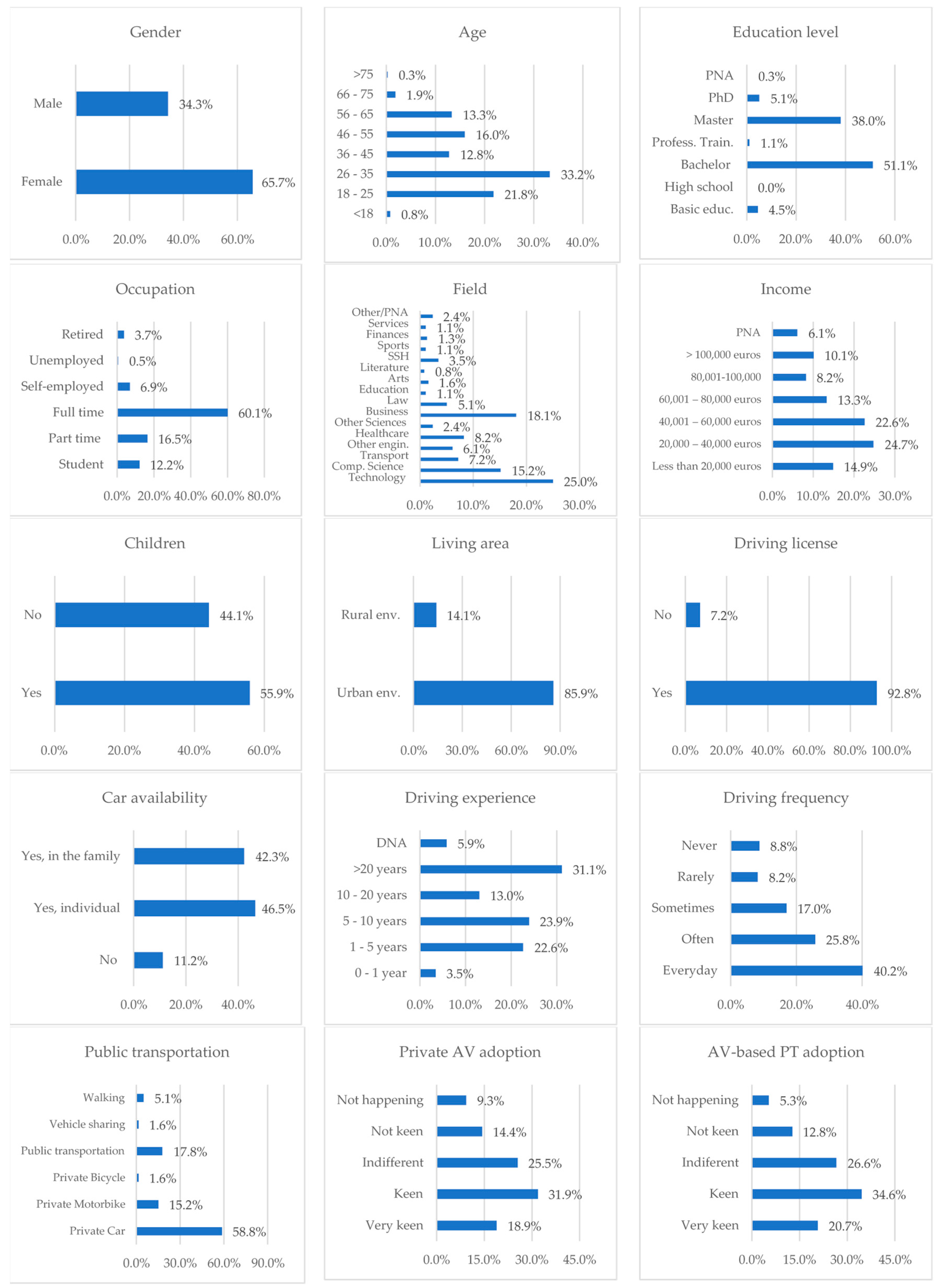
4.1. Exploratory Data Analysis
4.2. Exploratory Factor Analysis
4.3. Regression Analysis
5. Conclusions
- For both types of AV-based solutions, the results showed that issues related to safety were those with higher impacts on adoption. This influence can be found in previous works (e.g., [11,13]). However, safety perceptions of AVs were similar across genders in this study, while other authors found females to be more safety-sensitive (e.g., [19]). It could be hypothesized that women willing to participate in an online survey on AVs do not represent the whole female spectrum. A deeper analysis in this regard would be desirable.
- Particularizing for the case of AV-based public transportation systems, people already feeling safe when traveling on traditional public transportation were more willing to adopt them. This finding is consistent with other studies suggesting that the users of public transport who act as passengers are more likely to accept being passengers in driverless vehicles [21].
- Conversely, other variables, such as the value of time (in the form of willingness to take advantage of travel time to perform any kind of task), did not show any effect on AV adoption. Previous works in the literature did find an influence of these variables (e.g., [16,18]). Thus, specific studies on these relationships are needed.
- Additionally, the factor analysis suggested that actual driving features and experiences might influence AV adoption. Different results can be found in the state of the art with regard to the possible impact of these factors, which should be further analyzed.
- Appeal cannot be easily influenced. However, safety perceptions can be, at least to some extent. Given the former results, stakeholders interested in AV adoption should try to clarify how AVs drive and their advantages from the safety point of view. Potential risks and their probabilities should also be explained. Information can shape perceptions, and informed individuals tend to make more objective decisions.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SAE Level | Controls | Environm. Monitoring | Driving Superv. | Scenarios |
|---|---|---|---|---|
| 0: all on | Driver | Driver | Driver | All |
| 1: hands on | Driver | Driver | Driver | Some |
| 2: hands off | Driver + vehicle | Driver | Driver | Some |
| 3: eyes off | Vehicle | Vehicle | Driver | Some |
| 4: mind off | Vehicle | Vehicle | Driver + vehicle | Some |
| 5: all off | Vehicle | Vehicle | Vehicle | All |
- QUESTIONNAIRE
- PART 1: SOCIODEMOGRAPHIC
- 1.
- What is your gender?
- Male
- Female
- Non-binary
- Prefer not to answer
- 2.
- What is your age?
- Under 18
- 18–25
- 26–35
- 36–45
- 46–55
- 56–65
- Over 65
- 3.
- Prefer not to answer
- Education level
- Basic education
- High school degree
- College degree
- Master’s degree
- Doctorate degree
- Prefer not to answer
- 4.
- Current occupation:
- Student
- Part time job
- Full time job
- Self-employed
- Unemployed
- Retired
- Other:
- Prefer not to answer
- 5.
- Which of the following categories best describe the field you work (worked) or study in:
- Technology
- Computer Science
- Transportation
- Other engineering fields
- Healthcare
- Other Sciences (Math, Physics, etc.)
- Business
- Law
- Pre-university education
- Arts
- Literature
- Social Sciences and Humanities
- Sports
- Other:
- Prefer not to answer
- 6.
- Income per year:
- Less than 20,000 euros
- 20,000–40,000 euros
- 40,001–60,000 euros
- 60,001–100,000 euros
- More than 100,000 euros
- Prefer not to answer
- 7.
- Do you have children?
- Yes
- No
- Prefer not to answer
- 8.
- Where do you live?
- Urban environment
- Rural environment
- Prefer not to answer
- PART 2: CURRENT MOBILITY/DRIVING BEHAVIOR
- 9.
- What is your primary transportation mode?
- Private Car
- Private Motorbike
- Private Bicycle
- Public transportation (train, metro, bus, etc.)
- Carsharing, moto sharing, carpooling
- Walking
- Other
- 10.
- Do you have a driving license?
- Yes
- No
- 11.
- If you have a driving license, how many years of experience do you have?
- 0–1 year
- 1–5 years
- 5–10 years
- 10–20 years
- More than 20 years
- Does not apply
- 12.
- Do you have a car in your household?
- Yes, I share a car in my family
- Yes, I have my own car
- No
- 13.
- How often do you drive a car?
- Everyday
- Often (3–5 times a week)
- Sometimes (1–2 times a week)
- Rarely (2–5 times a month)
- Never
- 14.
- How do you rate your driving skills?
- Professional
- Above average
- Average
- Bad
- Very bad
- 15.
- What type of driver would you describe yourself as?
- Aggressive
- Average
- Cautious
- 16.
- How fast do you drive?
- Above speed limits
- According to speed limits
- Slower than speed limits
- 17.
- Which is your usual safety perception when you are driving?
- Very safe
- Safe
- Moderate
- Rather unsafe
- Very unsafe
- Don’t drive
- 18.
- How safe do you feel when being a passenger in a private car? (General feeling not considering the particular driver)
- Very safe
- Safe
- Moderate
- Rather unsafe
- Very unsafe
- 19.
- How safe do you feel when being a passenger in public transportation? (General feeling not considering the particular driver)
- Very safe
- Safe
- Moderate
- Rather unsafe
- Very unsafe
- 20.
- Do you perform other tasks while driving? Texting, cell phone calls, music choosing, destination selection, eating…
- Yes
- No
- I do not drive
- 21.
- If you do, how often do you perform these other tasks
- All the time (every ride)
- Frequently (almost every ride)
- Moderate
- Occasionally
- Rarely
- 22.
- Have you ever driven under the influence of alcohol or drugs?
- Yes
- No
- Prefer not to answer
- 23.
- If you have, how often have you driven under the influence of alcohol or drugs?
- Every time I go out
- Frequently
- Moderate
- Sometimes
- Once
- I have not done it
- Prefer not to answer
- 24.
- How much importance do you give/would you give to safety when choosing a new vehicle?
- Most importance
- Very importance
- Moderate
- Low importance
- No importance
- 25.
- Which are the most important factors when choosing among different public transportation providers, if available? Multiple answers allowed.
- Safety
- Frequency
- Comfort
- Price
- Punctuality
- Other
- 26.
- What do you do while being a passenger on public transportation?
- Work
- Study
- Entertainment (videogame, tv series, reading a book)
- Nothing/Rest
- Other
- 27.
- Have you ever been involved in a car crash while driving?
- Yes
- No
- 28.
- Have you ever been involved in a crash while being a passenger?
- Yes, in a private car
- Yes, in public transportation
- No
- 29.
- Have you ever driven a car with advanced driving assistance systems? (Cruise control, automatic braking, lane departure detection, blind spot detection, accident prevention systems…)
- Yes
- No
- 30.
- Either as driver or as passenger, how much safer do you feel if the car has advanced driving assistance systems?
- Much safer
- Safer
- Same as without assistance
- Less safe
- Much less safe
- 31.
- How much do you think this kind of assistance systems contributes to road safety and to avoid accidents?
- A lot
- Pretty much
- Moderate
- A bit
- Do not help
- PART 3: PERCEPTIONS ABOUT AUTOMATED/AUTONOMOUS VEHICLES
- 32.
- How familiar are you with the concept of autonomous vehicles?
- Expert
- Very familiar
- Familiar
- A little familiar
- Non-familiar. The information provided before was my first approach to the topic.
- 33.
- How excited (attracted) are you in general with the idea of fully autonomous vehicles (SAE level 5)?
- Very excited
- A bit excited
- Do not care
- Not excited
- Against it
- 34.
- How safe do you think you would feel as a passenger in a fully automated car (SAE5)?
- Very safe
- Safe
- Moderate
- Not safe
- Not very safe
- 35.
- What would your safety perception be circulating in a traditional vehicle but in a mixed environment sharing the road with autonomous vehicles?
- Very safe
- Safe
- Same as nowadays
- Less safe than nowadays
- Very unsafe
- 36.
- Would you be concerned if your family or closest people travelled in fully automated vehicles?
- Very concerned
- Concerned
- Same as if it is a human driven vehicle
- Less concerned
- Not concerned
- 37.
- Would you be concerned if your goods travelled in fully automated vehicles?
- Very concerned
- Concerned
- Same as if it is human-driven vehicle
- Less concerned
- Not concerned
- 38.
- What aspects concern you about fully automated vehicles? (Multiple answers allowed)
- Not having control of the vehicle
- The possibility of a technological error (mechanical failure breakdown)
- Technology’s incorrect reasoning in a difficult situation (software failure)
- The possibility of the car/system being hacked
- Ethical issues
- I have no concerns
- Other
- 39.
- How safe do you think autonomous vehicles (SAE5) would be compared to human-driven vehicles? Note that we are now not asking about your safety perception, but about actual consequences of these vehicles’ introduction.
- Much safer
- Safer
- Same
- Less safe
- Really dangerous
- 40.
- How many accidents do you think will take place with autonomous vehicles (SAE5) sharing the road network with other vehicles, compared to nowadays? Note that we are not asking about your safety perception, but about actual consequences of these vehicles’ introduction.
- Little to no accidents
- Less accidents than now
- Same amount of accidents
- More accidents
- Much more accidents
- 41.
- How keen on shifting to a private fully autonomous vehicle would you be considering it would have a reasonable price?
- Very keen
- Keen
- Moderate
- Not keen
- Not happening
- What would you do while riding a fully autonomous vehicle (SAE level 5)?
- Work
- Study
- Entertainment (videogame, tv series, reading a book)
- Nothing/Rest
- Other
- 42.
- How keen on shifting to a public transportation system based on fully autonomous vehicles (e.g., SAE5 level buses) would you be considering it would have a reasonable price?
- Very keen
- Keen
- Moderate
- Not keen
- Not happening
- 43.
- What reasons would motivate you to shift to an autonomous vehicle (SAE5), either private or public? Multiple answers allowed
- Self-comfort
- Emissions reduction linked to their driving efficiency
- Traffic fluidity improvements (travel time savings)
- Avoidance of accidents (minimizing human errors, no driving under the influence of alcohol, tired)
- The possibility of doing things (e.g., working) during the journey
- The excitement for technological improvements and evolution
- Nothing
- Other
- 44.
- In the event of an expected crash between the automated car and pedestrians or another car, how do you think the car should react?
- Trying to save the largest most amount of people
- Trying to save its own passenger/s
- Trying to save the pedestrians or other cars involved, no matter their number.
- Trying to save the youngest people involved
- 45.
- Which autonomy level would you choose for your car, disregarding differences in the price?
- Non-autonomous at all
- With basic driving assistance systems (SAE 1–2)
- Partially (conditioned) automated (SAE 3)
- Highly automated (SAE 4)
- Fully automated (SAE 5)
- 46.
- How should future mobility be? Multiple answers allowed
- Based on private autonomous vehicles.
- Based on shared autonomous vehicles
- Based on autonomous public transportation and private autonomous vehicles
- With autonomous public transportation and traditional private vehicles
- Based on SAE5 vehicles
- Based on SAE4 vehicles
- Based on SAE3 or inferior vehicles
- Based on soft transportation modes (walking, bicycle, scooters, etc.)
References
- J3016A:SEP2016; Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. Society of Automotive Engineers: Warrendale, PA, USA, 2016.
- Ntousakis, I.A.; Nikolos, I.K.; Papageorgiou, M. On microscopic modelling of adaptive cruise control systems. Transp. Res. Proc. 2015, 6, 111–127. [Google Scholar] [CrossRef]
- Martínez-Díaz, M.; Soriguera, F.; Pérez, I. Technology: A necessary but not sufficient condition for future personal mobility. Sustainability 2018, 10, 4141. [Google Scholar] [CrossRef]
- Martínez-Díaz, M.; Soriguera, F.; Pérez, I. Autonomous driving: A bird´s eye view. IET Intell. Transp. Syst. 2019, 13, 563–579. [Google Scholar] [CrossRef]
- Sala, M.; Soriguera, F. Capacity of a freeway lane with platoons of autonomous vehicles mixed with regular traffic. Transp. Res. Part B Methodol. 2021, 147, 116–131. [Google Scholar] [CrossRef]
- Adnan, N.; Md Nordin, S.; bin Bahruddin, M.; Ali, M. How trust can drive forward the user acceptance to the technology? In-vehicle technology for autonomous vehicle. Transp. Res. Part A Policy Pract. 2018, 118, 819–836. [Google Scholar] [CrossRef]
- Wang, S.; Zhao, J. Risk preference and adoption of autonomous vehicles. Transp. Res. Part A Policy Pract. 2019, 126, 215–229. [Google Scholar] [CrossRef]
- Wu, J.; Liao, H.; Wang, J.; Chen, T. The role of environmental concern in the public acceptance of autonomous electric vehicles: A survey from China. Transp. Res. Part F Traffic Psychol. Behav. 2019, 60, 37–46. [Google Scholar] [CrossRef]
- Fishbein, M.; Ajzen, I. Belief, Attitude, Intention and Behavior: An Introduction to Theory and Research; Addison-Wesley: Reading, MA, USA, 1975. [Google Scholar]
- Liljamo, T.; Liimatainen, H.; Pöllänen, M. Attitudes and concerns on automated vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2018, 59, 24–44. [Google Scholar] [CrossRef]
- Jing, P.; Xu, G.; Chen, Y.; Shi, Y.; Zhan, F. The Determinants behind the acceptance of autonomous vehicles: A systematic review. Sustainability 2020, 12, 1719. [Google Scholar] [CrossRef]
- Bennett, R.; Vijaygopal, R.; Kottasz, R. Attitudes towards autonomous vehicles among people with physical disabilities. Transp. Res. Part A Policy Pract. 2019, 127, 1–17. [Google Scholar] [CrossRef]
- Ljubi, K.; Groznik, A. Role played by social factors and privacy concerns in autonomous vehicle adoption. Transp. Policy 2023, 132, 1–15. [Google Scholar] [CrossRef]
- Peng, J.; Huang, H.; Ran, B.; Zhan, F.; Shi, Y. Exploring the factors affecting mode choice intention of autonomous vehicle based on an extended theory of planned Behavior—A case study in china. Sustainability 2019, 11, 1155. [Google Scholar] [CrossRef]
- Icek, A. The theory of planned behavior. Organ. Behav. Hum. Decis. Process. 1991, 50, 179–211. [Google Scholar]
- Lavieri, P.; Bhat, C. Modeling individuals’ willingness to share trips with strangers in an autonomous vehicle future. Transp. Res. Part A Policy Pract. 2019, 124, 242–261. [Google Scholar] [CrossRef]
- Wang, S.; Jiang, Z.; Noland, R.; Mondschein, A. Attitudes towards privately-owned and shared autonomous vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2020, 72, 297–306. [Google Scholar] [CrossRef]
- Malokin, A.; Circella, G.; Mokhtarian, P. How do activities conducted while commuting influence mode choice? Using revealed preference models to inform public transportation advantage and autonomous vehicle scenarios. Transp. Res. Part A Policy Pract. 2019, 124, 82–114. [Google Scholar] [CrossRef]
- Acheampong, R.; Cugurullo, F. Capturing the behavioural determinants behind the adoption of autonomous vehicles: Conceptual frameworks and measurement models to predict public transport, sharing and ownership trends of self-driving cars. Transp. Res. Part F Traffic Psychol. Behav. 2019, 62, 349–375. [Google Scholar] [CrossRef]
- Buckley, L.; Kaye, S.A.; Pradhan, A.K. Psychosocial factors associated with intended use of automated vehicles: A simulated driving study. Accid. Anal. Prev. 2018, 115, 202–208. [Google Scholar] [CrossRef] [PubMed]
- Salonen, A.O. Passenger’s subjective traffic safety, in-vehicle security and emergency management in the driverless shuttle bus in Finland. Transp. Policy 2018, 61, 106–110. [Google Scholar] [CrossRef]
- Likert, R. A technique for the measurement of attitudes. Arch. Psychol. 1932, 22, 55. [Google Scholar]



| Variable | Type | Denomin. |
|---|---|---|
| Willingness to shift to private AV | Ordinal | Shift_AV, 1 |
| Willingness to shift to public AV | Ordinal | Shift_ptAV, 2 |
| Gender | Categorical | Gender, 3 |
| Age | Ordinal | Age, 4 |
| Education level | Categorical | Ed_level, 4 |
| Occupation | Categorical | Occ, 5 |
| Field | Categorical | Field, 6 |
| Income | Ordinal | Income, 7 |
| Children | Binary | Children, 8 |
| Residence | Categorical | Residence, 9 |
| Car license | Binary | Lic, 10 |
| Car availability | Categorical | Car_avail., 11 |
| Driving experience | Ordinal | Dr_exp, 12 |
| Driving frequency | Ordinal | Dr_fq, 13 |
| Transport mode | Categorical | Dr_mode, 14 |
| Crash driving | Binary | Crash_dr, 15 |
| Crash as passenger | Binary | Crash_pax, 16 |
| Experience with ADAS | Binary | Adas, 17 |
| Tasks while driving | Binary | Task_dr, 18 |
| Frequency of tasks | Ordinal | Task_fq, 19 |
| Tasks on public transport | Binary | Task_pt, 20 |
| Alcohol while driving | Binary | Alc_dr, 21 |
| Driving skills | Ordinal | Dr_skills, 22 |
| Driver profile | Categorical | Dr_profile, 23 |
| Safety perception while driving | Ordinal | Safe_dr, 24 |
| Safety perception as passenger | Ordinal | Safe_pax, 25 |
| Safety perception on public transport | Ordinal | Safe_ptpax, 26 |
| AV appeal | Ordinal | AV_app, 27 |
| Safety perception in AV | Ordinal | Safe_AV, 28 |
| Safety perception family in AV | Ordinal | Safe_famAV, 29 |
| Channel | Target Respondents |
|---|---|
| Authors’ direct contacts and subsequent chains of contacts | |
| Authors’ direct contacts and subsequent chains of contacts | |
| Related associations or focus groups (e.g., Associació de Municipis per la Mobilitat i el Transport Urbà) | |
| Users directly linked with the authors or their institution but also following topics/people related to transportation, AVs, automation, etc. Transport companies and authorities were also labeled (e.g., EIT Urban Mobility). | |
| Amazon Mech. Turk | Crowdsourcing marketplace in which respondents are paid |
| SurveyCircle | Quid pro quo platform used for research and market purposes |
| Network of communities where users share their interests | |
| Forums | Groups related to particular forms of mobility (e.g., cyclists, motorists, etc.) |
| Communalities (Unrestricted) | Rotated Component Matrix 1 (Unrestricted) | Rotated Component Matrix 2 (Restricted) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Variable | Initial | Extraction | F1 | F2 | F3 | F4 | F1 | F2 | F3 |
| Age | 0.591 | 0.927 | 0.956 | 0.880 | |||||
| License | 0.594 | 0.946 | 0.363 | 0.884 | 0.771 | ||||
| Dr_exp | 0.673 | 0.714 | 0.734 | 0.357 | 0.342 | 0.815 | |||
| Dr_fq | 0.344 | 0.487 | 0.459 | 0.462 | |||||
| Dr_mode | 0.316 | 0.434 | −0.409 | −0.340 | |||||
| Alc_dr | 0.373 | 0.432 | −0.388 | −0.407 | −0.572 | ||||
| Dr_skills | 0.443 | 0.616 | 0.760 | 0.589 | |||||
| Dr_profile | 0.380 | 0.431 | 0.474 | 0.350 | 0.602 | ||||
| Safe_dr | 0.511 | 0.676 | −0.774 | −0.754 | |||||
| AV_app | 0.527 | 0.619 | 0.780 | 0.830 | |||||
| Safe_AV | 0.532 | 0.847 | 0.913 | 0.846 | |||||
| Dependent Variable | Independent Variables | Model-Fit Data | Goodness-of-Fit | Pseudo-R | |||
|---|---|---|---|---|---|---|---|
| −2Loglikel 1. | Chi-Square | Sig. | Chi-Square | Sig. | Nagelkerke | ||
| Shift_AV | I: 3 to 29 | 694.396 | 454.327 | 0 | 1539.69 | 0.004 | 0.736 |
| II: 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 18, 19, 20, 21, 22, 23, 24, 25, 26, 29 | 893.78 | 254.933 | 0 | 1425.449 | 0.312 | 0.517 | |
| III: 4, 5, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 18, 19, 20, 21, 22, 24, 25, 29 | 938.942 | 209.771 | 0 | 1394.926 | 0.691 | 0.449 | |
| IV: 9, 11, 12, 13, 14, 15, 16, 17, 18, 19, 21, 22, 23, 25, 28, 29 | 853.015 | 295.698 | 0 | 1377.957 | 0.881 | 0.571 | |
| V: 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 26, 28, 29 | 836.045 | 312.668 | <0.001 | 1418.14 | 0.617 | 0.593 | |
| VI: 4, 8, 9, 10, 11, 14, 20, 26, 27, 28, 29 | 805.533 | 332.665 | <0.001 | 1362.616 | 0.715 | 0.616 | |
| VII: 14, 26, 27, 28 | 511.725 | 306.530 | <0.01 | 506.032 | 0.843 | 0.585 | |
| VIII: 27, 28, 29 | 339.744 | 310.764 | 0 | 210.58 | 0.840 | 0.590 | |
| Shift_ptAV | I: 3 to 29 | 785.470 | 315.877 | 0 | 3364.566 | 0 | 0.600 |
| II: 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 18, 19, 20, 21, 22, 23, 24, 25, 26, 29 | 899.435 | 201.912 | 0 | 2689.614 | 0 | 0.439 | |
| III: 4, 5, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 18, 19, 20, 21, 22, 24, 25, 29 | 936.942 | 164.405 | 0 | 2104.713 | 0 | 0.374 | |
| IV: 9, 11, 12, 13, 14, 15, 16, 17, 18, 19, 21, 22, 23, 25, 28, 29 | 825.571 | 29.306 | 0.061 | 898.003 | 0 | 0.079 | |
| V: 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 26, 28, 29 | 890.984 | 210.399 | 0 | 1705.165 | 0 | 0.453 | |
| VI: 4, 8, 9, 10, 11, 14, 20, 26, 27, 28, 29 | 881.771 | 210.447 | 0 | 1318.116 | 0.924 | 0.453 | |
| VII: 14, 26, 27, 28 | 566.465 | 192.236 | 0 | 571.645 | 0.16 | 0.423 | |
| IX: 26, 27, 28 | 361.951 | 186.886 | 0 | 227.675 | 0.494 | 0.414 | |
| Dependent Variable | Independent Variables | Goodness-of-Fit | Pseudo-R Nagelkerke | |
|---|---|---|---|---|
| Chi-Sq. | Sign. | |||
| Shift_AV | F1, F2 | 214.081 | 0.998 | 0.952 |
| Shift_ptAV | F1, F2 | 2.682 | 0.975 | 0.945 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martínez-Díaz, M.; Montes Carbó, M.-M. Assessing User Acceptance of Automated Vehicles as a Precondition for Their Contribution to a More Sustainable Mobility. Sustainability 2024, 16, 895. https://doi.org/10.3390/su16020895
Martínez-Díaz M, Montes Carbó M-M. Assessing User Acceptance of Automated Vehicles as a Precondition for Their Contribution to a More Sustainable Mobility. Sustainability. 2024; 16(2):895. https://doi.org/10.3390/su16020895
Chicago/Turabian StyleMartínez-Díaz, Margarita, and Maximilià-Miquel Montes Carbó. 2024. "Assessing User Acceptance of Automated Vehicles as a Precondition for Their Contribution to a More Sustainable Mobility" Sustainability 16, no. 2: 895. https://doi.org/10.3390/su16020895