Abstract
In recent years, with the advancement of urbanization and the increase in traffic congestion, the demand for autonomous driving has been steadily growing in order to promote sustainable urban development. The evolution of automotive autonomous driving systems significantly influences the progress of sustainable urban development. As these systems advance, user evaluations of their performance vary widely. Autonomous driving systems present both technological advantages and controversies, along with challenges. To foster the development of autonomous driving systems and facilitate transformative changes in urban traffic sustainability, this research aims to explore user behavior regarding the continued use of autonomous driving systems. It is based on an extended technology acceptance model, examining the impacts of user scale, perceived importance, post-experience regret, user driving habits, and external factors on the intention to continue using these systems. The conclusions are as follows. (1) A model design is constructed that uses user scale, perceived importance, and regret after experience as antecedent variables, with user driving habits as a mediating variable to explain the intention to continue using autonomous driving systems, demonstrating a degree of innovation. (2) It is verified that user driving habits are a key factor determining the intention to continue using these systems, highlighting the importance of user habits in the application of autonomous driving systems. (3) Perceived importance significantly affects both user driving habits and the intention to continue using the system, while regret after experience has a significant negative correlation only with habit formation and does not directly affect the intention to continue use, indicating that users are more concerned with the actual functionality and practicality of the system. (4) User scale is shown to indirectly influence the intention to continue using through various pathways, providing a new perspective for related theoretical research. (5) Aside from safety capabilities, other external factors such as economic benefits and technological stability significantly influence the intention to continue using, while the lack of significance for safety capabilities may be due to users trusting their own driving skills in critical moments. (6) The research results offer valuable references for the improvement and promotion of autonomous driving systems, emphasizing the practicality and usability of the system. (7) This study provides a new theoretical framework for the application of habit theory and regret theory in related fields. Therefore, through empirical analysis, this research delves into the key factors influencing the intention to continue using autonomous driving systems, offering certain reference value for the development of autonomous driving systems and contributing to their theoretical development and practical application.
1. Introduction
In recent years, with the advancement of urbanization, the demand for various modes of transportation has continued to rise. Traffic congestion has become increasingly severe, and the demand for automotive mobility is on the rise. To promote the sustainable development of urban transportation, there has been a significant push towards the advancement of autonomous driving technology. Researchers are continuously exploring transportation methods that are safe, efficient, environmentally friendly, and economically viable [1]. Therefore, many experts believe that autonomous driving technology is considered an effective means of alleviating traffic congestion, enhancing road safety, improving economic benefits, and increasing energy efficiency [2]. At the same time, autonomous driving systems represent an effective means of promoting sustainable urban transportation development [3]. In response to the practical challenges emerging in traffic development, governments and technology companies worldwide have shown significant interest in autonomous driving technology, investing substantial resources into research [4]. These real-world issues, along with policy guidance and support, have not only fostered the research and development of autonomous driving technology, but also accelerated its commercialization process [4]. The emergence of autonomous driving technology has prompted significant transformations in the automotive and transportation industries, reflected in both technology and products as well as in the operational modes and industrial structures of the entire sector [5].
With the rapid advancements in artificial intelligence, big data analysis, machine learning, computer vision, smart sensors, and other areas of the Internet of Things (IoT), the adoption and utilization of autonomous vehicles and driver assistance systems have accelerated [2]. These technological advancements provide essential technical support for autonomous driving, enabling vehicles to perform more advanced functions, such as automated parking, autonomous braking systems (ABSs), blind spot detection, and adaptive cruise control (ACC) [2]. Consequently, autonomous driving technology has evolved from the initial Level 1 (L1) to the current Level 4 (L4), with plans for Level 5 (L5). In the existing market, both traditional fuel vehicles and electric vehicles primarily feature autonomous driving levels ranging from L1 to L2. Additionally, fully autonomous driving systems are concentrated in the realm of driverless taxis (Robotaxis), currently operating at Level 4. As shown in Table 1, the classification of automotive autonomous driving system levels is outlined.

Table 1.
Introduction of L1–L5 vehicle autonomous driving system.
Although all are collectively referred to as autonomous driving systems, the technical characteristics vary across different levels. Level 1 autonomous driving systems primarily offer functions such as lane-keeping assistance or adaptive cruise control. These functions can operate independently, but they require the driver to continuously monitor the road conditions and be ready to take control at any moment [13]. Level 1 systems typically employ advanced sensors and control systems such as cameras, radar, and GPS, along with model-based control algorithms like the L1 adaptive controller, to achieve basic vehicle control [14,15]. Level 2 autonomous driving systems provide more advanced features, such as automatic emergency braking and lane-keeping assistance. These functions can execute automatically under specific conditions, but the driver must remain attentive and ready to take control most of the time [16]. Level 2 systems may incorporate deep learning-based object detection technologies such as Faster R-CNN and the YOLO series of algorithms, which can identify and track objects on the road in real time, providing decision support for the vehicle [17,18]. Currently, most consumer vehicles on the market fall within these two levels of autonomous driving systems. Level 3 autonomous driving systems can fully take over driving tasks under specific conditions, but the driver must still be prepared to regain control when prompted by the system. This level typically requires more complex sensor fusion technologies and decision algorithms to handle more intricate driving scenarios [16]. Level 4 autonomous driving systems can achieve fully automated driving in specific geographic areas and environmental conditions without human intervention. Such systems typically require highly accurate map data and advanced positioning technologies, along with complex decision-making algorithms capable of handling various driving scenarios [16]. Currently, the autonomous taxi systems in practical use on the market are at this stage. Level 5 autonomous driving systems can achieve fully automated driving in all geographic areas and environmental conditions without human intervention. This level of automation represents the pinnacle of autonomous driving technology, requiring the integration of all levels of technology and functionality, including advanced perception, decision-making, and execution capabilities [16].
Autonomous taxis (Robotaxis) are Level 4 autonomous driving systems [11] and are a crucial component of smart cities and future urban transportation systems. By utilizing highly automated driving technology, they enhance the efficiency, safety, and sustainability of urban transport. Relevant research indicates that Robotaxi technology is focused on the electric vehicle sector, where the application of electric vehicles in autonomous driving can also reduce traffic congestion, improve fuel efficiency, and ultimately lead to a more sustainable and environmentally friendly transportation system [1]. However, the actual market reveals the coexistence of both combustion engines and electric vehicles. Autonomous taxis use deep neural network (DNN) architectures to replicate human driving skills such as classifying straight and turning maneuvers, detecting obstacles, and controlling steering and speed [19]. They also employ convolutional neural networks (CNNs) for visually guided planning and control to ensure the efficient operation of autonomous taxis [20]. The advent of Robotaxis has significantly alleviated urban traffic congestion, offering enhanced environmental benefits and promoting urban sustainability [21]. Pilot implementations of Robotaxis have commenced in several cities across China, including Beijing, Shanghai, and Guangzhou, where residents have begun to reserve and experience Robotaxi services online [22]. This indicates that autonomous taxis have gained a certain market share and been successfully launched commercially in these cities. From a technical standpoint, autonomous taxis require precise detection and control parameters, such as steering and speed control. When users set clear routes and destinations, the system primarily relies on deep learning models to simulate the driving capabilities of human drivers [19]. This technology not only enhances road safety but also helps reduce traffic congestion and increase urban mobility [23]. Therefore, the autonomous driving systems in vehicles hold significant potential for enhancing urban traffic sustainability and the sustainable use of energy [24].
Thus, autonomous driving systems have emerged in two main areas of the automotive sector. One area focuses on the sale of passenger cars, where the existing statistics (Table 1) indicate a concentration on Level 1 and Level 2 autonomous driving systems. The other area pertains to autonomous taxis (Robotaxis), which, based on current technology, have realized fully automated driving modes that completely replace human drivers. Therefore, the users discussed in this paper refer to those who have utilized or experienced autonomous driving systems, including consumers of autonomous passenger car systems and users who have experienced autonomous taxis.
Relevant studies suggest that a key factor of autonomous driving systems is their ability to make reliable real-time decisions, i.e., technological reliability [5]. At the same time, autonomous driving systems not only effectively improve energy efficiency, but also provide safer and more comfortable experiences during driving [25]. With the application of artificial intelligence and deep learning technologies, autonomous driving systems have demonstrated strong safety capabilities in various fields such as pedestrian detection, obstacle recognition, and stereo matching [26,27]. Furthermore, autonomous driving systems can assist cars in achieving breakthroughs in energy management technologies, battery usage, and intelligent driving algorithms, leading not only to increased efficiency but also to enhanced economic viability [28].
Despite the rapid development of autonomous driving technology, it still faces numerous challenges and controversies, including issues related to safety, legal regulations, ethics, privacy protection, and societal acceptance [4]. The challenges related to after-sales and technical services are paramount, including the management of complex software systems, real-time data processing, and the intricacies of experimental and road testing [29,30,31]. These service factors demand that technicians continuously enhance their software development efficiency to respond to the complex and variable nature of environmental data. Furthermore, consumer considerations about the social and ethical implications of autonomous driving systems are crucial for their usage, such as investigating causes of accidents and preventive strategies [32]. Additionally, ethical dilemmas regarding whether autonomous vehicles can make the correct decisions in emergency situations have arisen [33]. Societal influence is also a significant factor, as social norms and the behavior of others can greatly affect an individual’s willingness to accept these systems [34]. In other words, if a user’s friends or colleagues are using autonomous driving systems and providing positive reviews, this can increase other potential users’ willingness to accept these systems.
Current research on the continuous use of autonomous driving systems is still in the preliminary exploration stage. However, there is already a wealth of studies regarding the acceptance of autonomous driving technology. Studies indicate that perceived usefulness and perceived ease of use positively influence consumers’ adoption of autonomous driving systems [35]. Specifically, perceived usefulness refers to the extent to which users believe the technology can meet their needs or solve their problems. In the context of autonomous driving systems, users feel that the system can enhance driving safety, reduce the risk of fatigue driving, or provide a more comfortable driving experience, making them more willing to adopt and use the system [36,37]. Perceived ease of use relates to users’ evaluation of the simplicity and intuitiveness of operating the technology. If users find the autonomous driving system easy to understand and operate, they are more likely to accept and continue using it [36,37]. Furthermore, the technology acceptance model (TAM) and other related models have also confirmed the levels of user acceptance for new autonomous driving technologies [38,39]. These studies highlight that users’ perceptions of the usefulness of new technologies and their attitudes towards them significantly affect their acceptance of autonomous driving systems. User experience is also a crucial factor that influences whether individuals are willing to use autonomous driving systems. Utilizing VR virtual driving can enhance users’ acceptance of autonomous driving by increasing their trust in the systems [40]. Additionally, perceived safety is an important factor influencing users’ acceptance of autonomous driving systems, as the perception of safety directly impacts users’ willingness to adopt [40]. Real-time integration with existing traffic systems is also a key factor for the efficient operation and safe traffic flow of autonomous driving systems, making it one of the important determinants of user acceptance [41].
This research illustrates how users perceive the utility of new technologies and their attitudes towards them, and how this in turn affects their acceptance of autonomous driving systems. However, studies on users’ continued usage remain exploratory. Therefore, this research is both necessary and significant, as it aims to fill a gap in this area. It also provides recommendations for the future development of more user-friendly driving systems, based on the actual experiences of users of the autonomous driving systems currently on the market. By analyzing the continuous usage behavior of users of existing autonomous driving systems, we found that the development of these systems is still in the process of refinement and initial practice. The factors influencing users’ intentions for continued use and the mechanisms at play can thus be deeply explored, leading to the formation of new theoretical models to substantiate the intentions for continued usage behavior. This, in turn, can enhance the development of autonomous driving systems. Therefore, this research contributes to the ongoing improvement and innovation of autonomous driving systems, serving to elaborate on users’ intentions for continued use and promoting the adoption and application of these systems.
2. Theoretical Analysis and Research Hypotheses
2.1. Theoretical Analysis
This study is based on the technology acceptance model (TAM) as its foundational framework. The TAM aims to explain and predict users’ acceptance of information technology, primarily highlighting two variables, perceived usefulness and perceived ease of use, which influence users’ decisions to accept and utilize information technology [36]. However, over time, researchers have discovered that these two variables alone do not fully account for all instances of technology acceptance. Consequently, they began to explore other factors that may affect technology acceptance, incorporating elements such as social influence, cognitive tool processes, and perceived user resources into the extended TAM model [42,43,44]. Therefore, building upon this theoretical foundation, this study integrates habit theory and regret theory, considering user scale, perceived importance, and post-experience regret as antecedent variables. These antecedent variables influence the intention for continued use through users’ driving and usage habits. Additionally, the model accounts for the potential impacts of external factors, including economic, security, technological, ethical, social influence, and service factors, on the construction of a model of sustained usage behavior for autonomous driving systems. This aims to better understand the factors and pathways that influence users’ intentions for continued use of autonomous driving systems.
User habits receive little attention in the specific system literature, but they are widely studied in fields such as social psychology, marketing and consumer behavior, and organizational behavior [45]. In the realm of autonomous driving systems, personalized driving experiences are crucial for enhancing user safety and comfort [46,47]. For instance, learning users’ preferred driving styles and adjusting autonomous driving habits and vehicle control modes accordingly can significantly increase passenger satisfaction [48]. Furthermore, enabling smart vehicles to learn user habits and preferences through artificial intelligence is an important direction for improving user experience [49]. Simultaneously, according to the technology acceptance model (TAM), the acceptance of information technology by users is influenced by perceived usefulness and perceived ease of use [36]. Under the influence of driving habits, if users believe that a particular driving system can effectively enhance safety and convenience, they are more likely to continue using these systems [50]. Therefore, the formation of habits is a critical factor influencing the intention to continue usage. Once a habit is formed, it becomes challenging to change, even if users are aware of its potential negative effects [51,52]. Consequently, continuous usage behavior results from the interplay of rational cognition and habit [53]. On one hand, rational users use autonomous driving systems to better achieve their goals, and they are likely to continue using these systems only when they perceive them as useful or important (perceived importance) [54]. On the other hand, scholars argue that conscious usage is also affected by irrational factors such as mood, satisfaction, and other emotional variables [53]. Therefore, positive user experiences foster intentions for continued usage, while negative emotions post-experience (such as regret) may hinder such intentions [55]. Traditional behavioral theories consistently agree that cognitive and emotional responses influence the emergence of continued intentions. However, users often engage in habitual behaviors unconsciously while using certain systems [45,53]. Consequently, in the technology acceptance model (TAM), habits are identified as a key factor that mediates satisfaction, usability, significance, convenience, and continued use, highlighting the importance of habits in user persistence [52].
Furthermore, the relevant literature indicates that external factors significantly influence the acceptance and usage behavior of autonomous driving systems, including safety considerations, social influence, service quality, and social trust [38,56]. For instance, social influence is regarded as the strongest predictor of public acceptance of autonomous vehicles [57]. Additionally, social trust has both direct and indirect effects on the acceptance of autonomous technology, impacting not only the general acceptance of such systems but also influencing acceptance through perceived benefits and risks [58]. Moreover, trust is considered one of the key determinants of user acceptance of autonomous vehicles [59]. Trust directly affects expectations regarding the technological reliability of autonomous systems and is crucial for reducing perceived risks, thereby directly influencing user acceptance [58]. Furthermore, trust plays a vital role in consumer adoption of autonomous vehicles, affecting adoption through both direct and indirect effects on attitudes [60]. External factors have a significant impact on users’ acceptance of autonomous driving systems and, consequently, these external factors will also influence users’ intentions for continued use of automotive autonomous driving systems.
Based on the theoretical analysis above, hypotheses are established and a theoretical model is constructed. Users’ intentions for continued use are influenced not only by the perceived usefulness or significance of the system (perceived importance) and irrational factors post-usage (regret), but also by unconscious behaviors (habitual actions). Moreover, the perceived significance of users, user scale, and post-experience regret collectively affect user habits, promoting the formation of habits in utilizing autonomous driving systems. To enhance the stability of the model’s predictive efficacy, economic factors, safety factors, technological factors, ethical considerations, social influences, and service factors are integrated into the model as control variables.
2.2. Research Hypotheses
2.2.1. User Scale
The increase in user scale impacts the practicality and usability of a system. As more users engage with the same system, these factors may change due to resource allocation, system load, or other external influences, thus affecting users’ perceptions and experiences [61]. The importance of user experience in systems and services continues to grow [62]. As the number of users rises, the system must manage more data, potentially leading to a decline in performance, which in turn affects the user experience. Users’ evaluations of the system shift from initial curiosity to assessments of practicality and usability [63]. According to social cognitive theory, the size of the user group can impact individuals’ self-efficacy and collective efficacy, subsequently influencing users’ intent to participate. This means that as user numbers increase, individuals feel the strength of the collective which enhances their willingness to use the system [64]. Thus, expanding the user scale can elevate the perceived importance by boosting both individual and collective efficacy [64]. Furthermore, user engagement plays a crucial role in enhancing perceived significance, as users’ involvement in the system can improve the utilization rates and satisfaction [65]. Continuous growth of the user scale complicates system management, making it a key factor influencing perceived importance [66]. Therefore, a larger base of users operating an autonomous driving system increases the perceived significance of that system.
H1:
Increased user scale positively affects users’ perceived significance.
According to expectation confirmation theory, user satisfaction and willingness to continue using a system are influenced by the degree of alignment between the expectations before use and the actual experiences after use [54]. In other words, as the user base increases and the system effectively handles more users while maintaining good performance and service quality, user satisfaction increases, leading to positive emotional experiences. Conversely, failure to maintain these standards results in decreased satisfaction and negative emotional experiences, thus affecting users’ willingness to continue using the system [54,67]. After experiencing autonomous driving systems, users can have either positive or negative feelings, leading to emotional benefits or regrets, which subsequently affect consumer experience. Therefore, this article hypothesizes that increasing the number of users experiencing autonomous driving systems generates positive interactions, thereby reducing the likelihood of regret among other users.
H2:
There exists a negative correlation between user base size and user experience regret.
From the above statements, it is clear that the size of a system’s user base positively relates to its perceived importance and user satisfaction with the system [64,65,66]. Moreover, user importance and satisfaction are significant factors influencing users’ habits [54,61,62,67]. Therefore, a positive relationship exists between the user base of autonomous driving systems and users’ driving habits. For a large number of car drivers, a substantial user base facilitates better communication and interaction during non-driving time, enhancing users’ perception of importance and their satisfaction with autonomous driving systems, thereby encouraging the formation of behavioral habits.
H3:
There is a positive correlation between user base and user habits.
2.2.2. Perceptual Significance
According to Davis, users’ perceptions of the usefulness and ease of use of information technologies are key factors determining their acceptance. This indicates that the perception of importance directly influences users’ behavior [36]. In the study of text, the significance of autonomous driving systems refers to how much users or those who experience these systems value their importance. Generally, the more assistance autonomous driving systems provide to users, the more significant the users perceive these systems to be. Furthermore, once users recognize the importance and value of these systems, they are more likely to develop positive usage habits [68]. User habits have been shown to directly impact user loyalty and continuance intentions, highlighting that perceived importance is crucial for forming and maintaining usage habits [69]. Therefore, users’ perceptions of importance facilitate the formation of behavioral habits.
H4:
A positive relationship exists between perceived importance and users’ driving habits.
According to the expectation confirmation theory (ECT), users’ continued intention to use is influenced by their satisfaction with the system and their perceptions. This suggests that users who acknowledge their driving while using the system and have their expectations met are more likely to continue using it [54]. In the technology acceptance model (TAM), perceived importance is a crucial factor influencing users’ acceptance and continued use of technology [36]. Additionally, usage habits and satisfaction are sometimes significant factors that enhance the intention to continue using the system [45,70]. Therefore, this paper posits that, in the context of using autonomous driving systems, users’ perceived importance will increase their intention to continue using a system.
H5:
A positive relationship exists between perceived importance and users’ continuance intention.
2.2.3. Experience Regret
If individuals realize that a discarded option would yield a better outcome than the selected one, it prompts an unpleasant experience of regret which is crucial for the development of experiential regret [71]. Regret theory posits that when people deem alternative choices to be likely to result in better or worse outcomes, feelings of regret or relief arise [71]. Integrating Kang’s perspective, the negative emotional experience of regret after user interaction can adversely affect users [72]. Consequently, users’ evaluations of their experiences or usage of autonomous driving systems can be either positively or negatively inclined. Positive assessments lead to psychological satisfaction, while negative evaluations result in regret. Therefore, user satisfaction significantly influences the intent to continue use [54]. Following user experiences, when expectations are met or exceeded, satisfaction with the system increases, thereby enhancing the intent for ongoing use. In contrast, unmet expectations diminish this intent [73]. The impact of experiential regret on the intention for continued usage is both necessary and pivotal. In other words, users who experience regret after interacting with a system may reduce or even abandon their use of autonomous driving systems. The hypothesis proposed in this paper is as follows.
H6:
There exists a negative correlation between experiential regret and the intention for continued use.
Habits and behavioral intentions share similar automatic trigger mechanisms. When faced with certain specific cues, this mechanism automatically activates a particular behavioral response. This “cue–response” connection builds on past satisfactory behaviors that have been repeated [74]. A satisfying experience with a behavior is a key condition for habit formation, as such satisfaction increases the likelihood of individuals continuously repeating the same actions [75]. User experience, enjoyment, and cognitive absorption also significantly influence usage intentions. Cognitive absorption refers to the state of deep engagement users experience when using technology. This state can enhance users’ intention for continued use by increasing the perceived usefulness and ease of use [76]. Conversely, if users are dissatisfied with their cognitive absorption post-experience (experiencing regret), it may lead them to alter their existing usage patterns, thus hindering habit formation [70]. Therefore, this paper posits the following hypothesis.
H7:
There exists a negative correlation between users’ experience of regret and users’ driving habits.
2.2.4. User Usage Habit
Behavioral habits generally form in stable environments (similar physical and social surroundings) through repeated actions. Once habitual behavior is established, executing that behavior no longer requires rational analysis; thus, the stronger the habit, the weaker the rational thought [75]. A common conclusion in social psychology literature is that past (habitual) behavior can predict future behavior, given the influence of key variables in rational action theory and the theory of planned behavior [74]. Related studies suggest that habitual behaviors process information more quickly and easily than behaviors requiring extensive reasoning, resulting in. an increase in the frequency of consistent information technology usage. Their findings also confirm a significant positive relationship between user habits and the intention to continue usage [70]. Users easily develop habits during long-term frequent use of autonomous driving systems. Such habits not only save time and enhance efficiency, but also reduce cognitive processing which then evolves into unconscious, spontaneous habitual behaviors that influence the intention to continue usage. Therefore, this paper proposes the following hypothesis.
H8:
There is a positive correlation between users’ driving habits and users’ intention to continue usage.
2.2.5. The Impact of Economic, Safety, Technological, Ethical, Social and Service Factors on Continued Use Intentions
To enhance the stability of the predictive capabilities of the research model, this study incorporates economic, safety, technological, ethical, social, and service factors as control variables. This approach aims to better understand the influence of antecedent and mediator variables in the research model on the intention to continue using autonomous driving systems. Significant advancements have been made in energy management technology, battery utilization, and intelligent driving algorithms within autonomous driving systems, which not only improve efficiency but also enhance the economic benefits of vehicle usage [28]. Technical reliability is critical for autonomous driving systems as this determines their ability to make reliable decisions in real time [77]. These systems demonstrate strong safety capabilities across various fields, such as pedestrian detection, obstacle recognition, and stereo matching [26,27]. After-sales and technical support represent significant challenges that affect whether users will continue their use, as they involve the management of complex software systems, real-time data processing, and the complexities of experimental and road testing [29,30,31]. Users’ perceptions of ethical factors are also a critical consideration in the use of autonomous driving systems. These factors address issues such as accident causation and prevention strategies, as well as the ethical dilemmas surrounding decision-making in emergencies [32,33]. Social influences represent another vital factor, as social norms and the behaviors of others can significantly affect an individual’s willingness to accept new technology [34]. Therefore, this article posits that the economic benefits, technological stability, safety capabilities, after-sales and technical support, ethical considerations, and social impacts of autonomous driving systems influence users’ intentions to continue using these systems as aids or substitutes for personally driven vehicles.
H9a:
There is a positive correlation between economic benefits and users’ intention to continue use.
H9b:
There is a positive correlation between technological stability and users’ intention to continue use.
H9c:
There is a positive correlation between security capabilities and users’ intention to continue use.
H9d:
There is a positive correlation between after-sales and technical services and users’ intention to continue use.
H9e:
There is a positive correlation between ethical factors and users’ intention to continue use.
H9f:
There is a positive correlation between social influence and users’ intention to continue use.
3. Theoretical Models and Questionnaire Design
3.1. Theoretical Models
Based on the above theoretical analysis and hypotheses, this paper builds a research model, shown in Figure 1.
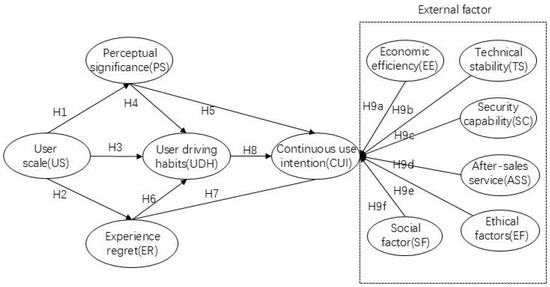
Figure 1.
Structural equation model.
3.2. Questionnaire Design
This study’s scales were derived from relevant studies by distinguished scholars and have been widely utilized. The scales in this research have undergone contextual adjustments based on the study’s focus. Consequently, this study design included a relevant questionnaire to examine the impact of autonomous driving systems on users’ ongoing usage behaviors. It assessed the mechanisms and effects concerning the perceived importance, experience of regret, user driving habits, and continuous usage intentions influenced by autonomous driving systems. Additionally, it considered the impacts of control variables such as economic, technological, safety, ethical, social, and after-sales factors on users’ intentions to continue using the system. The research design verified users’ continuous usage intentions through two facets, providing a reference and impetus for improving and developing autonomous driving systems.
The scale measuring user size was adapted from Lee [64] and Karapanos [63] and employs items (US1–US3) for measurement. For the latent variables of perceived importance and the experience of regret, the scale was adapted from Davis (Davis, 1989), Yaffe [68], and Kim [69], utilizing items (PS1–PS3). The content regarding experience satisfaction and regret was adapted from Choi [73], Lankton [70], and Kang [72], measured by items (ER1–ER3). User driving habits were derived from Aarts [75] and measured using items (UDH1–UDH3). Adaptations of viewpoints on continuous usage intentions were taken from Agarwal [75] and Limayem [45], employing items (CUI1–CUI3) for measurement.
The scale for economic benefits in the control variables was adapted from the relevant content of Vasebi [28] and measured using items (EE1–EE3). The scale for technical stability was sourced from Liu [77] and measured with items (TS1–TS3). The scale for safety capability was adapted from the works of Krizhevsky [27] and Simonyan [26], employing items (SC1-SC3). The scale for after-sales and technical service was based on content from Beringhoff [31], Costache [29], and Koopman [30], and measured with items (ASS1–ASS3). The ethical factors scale was adapted from the relevant content of Robinson [32] and Bonnefon [33], utilizing items (EF1–EF3). The scale for social influence was based on the relevant content from Jing [34] and measured using items (SF1–SF3). According to the above analysis, the questionnaire design items are shown in Table 2.
Table 2.
Definition of variable operability and reference scales.
3.3. Informed Consent
To enhance the collection of user research information for autonomous driving systems, we decided to utilize online surveys. There are two main reasons for this choice. First, as previously mentioned, the current market for autonomous driving systems is primarily divided into two categories: home car autonomous driving systems (Levels 1 and 2), and the autonomous taxis (Robotaxis) being piloted in cities like Shanghai, Beijing, and Guangzhou. Due to the differing geographic distribution of the survey participants, conducting face-to-face questionnaires would be impractical. Hence, we opted for online survey methods. Second, the distribution of home car users and autonomous taxi users is uneven. Home car users are more dispersed, while users of autonomous taxis tend to be clustered in certain areas. Collecting data from both user groups through offline means would yield limited insights, compromising the comprehensiveness and accuracy of the research data. Therefore, online surveys were employed to ensure the authenticity and completeness of the collected data. All respondents were users who had either driven an autonomous driving system or taken a taxi equipped with such a system, and all participants were sourced online. Before taking part in the survey, each participant reviewed an online informed consent form. As the survey was conducted online, all participants provided verbal consent. Participants had to confirm their understanding of the informed consent form and select the agreement option to access the questionnaire page. If a participant selected the refusal option, the survey was terminated. Additionally, this research pertains to automotive driving, thus it was restricted to adults aged 18 and above, excluding any involvement from minors.
4. Empirical Study
4.1. Sample Demographic Analysis
This study included an online survey conducted from July 2024 to September 2024. It utilized a web platform to distribute questionnaires to users of automobiles equipped with autonomous driving systems and users of autonomous taxis. Aside from basic personal information, all items used a Likert scale for responses, ranging from 1 (strongly disagree) to 7 (strongly agree). All participants answered questions voluntarily under informed consent and could exit the survey at any time.
A total of 1007 valid samples were collected. The questionnaire consisted of 33 questions, with 1007 valid responses. This sample size meets the standard proposed by Jackson, which requires a parameter-to-sample size ratio of over 1:10 [78]. Thus, the data analysis work was carried out based on this standard, and primarily processed using software such as SPSS 22.0, AMOS 24.0, and Smart PLS 4.0. As shown in Table 3, descriptive statistical analysis of the demographic variables was performed.
Table 3.
Demographic profile of sample (n = 1007).
In the survey of 1007 respondents, males comprised 57.7% while females accounted for 42.3%. The age distribution predominantly featured young and middle-aged individuals, specifically those aged 25 to 54, who represented 81.3%. This indicates a higher acceptance of autonomous driving systems among younger demographics, whereas middle-aged and older groups showed lower acceptance of new automotive automation technologies. Regarding the occupational distribution, freelancers and self-employed individuals made up a significant portion at 73.8%, while the remainder represented smaller percentages. This suggests that the general public is more concerned about autonomous driving systems, as these systems are essential components of daily vehicle use and taxi services which directly impact people’s everyday lives. Among the 1007 respondents, the frequency of using autonomous driving systems was primarily once a day or once a week. In other words, the usage frequency is quite high, with the vast majority of respondents relying on these systems. Therefore, the sample proportions across various sections of the survey are reasonable and meet the research requirements. Based on the respondents’ frequency of use, this study of user behavior regarding the continuous use of autonomous driving systems is necessary. This research can provide valuable insights for companies looking to improve and refine autonomous driving systems.
4.2. Reliability and Validity Analysis
Reliability refers to the extent to which a measuring tool can produce consistent results upon repeated use. This encompasses measurement accuracy, consistency, and robustness. The Cronbach’s alpha values for various measurement variables were calculated using SPSS 22.0 software. A result greater than 0.6 indicates that the data in the scale possesses accuracy and validity [79]. As shown in Table 4, the Cronbach’s alpha values in the survey data were all above 0.7. Additionally, the total correlation after deleting items was greater than 0.5, and the Cronbach’s alpha values after deleting any item did not exceed that result. This suggests that the items should not be removed and indicates that the scale used in this study possesses good reliability.
Table 4.
Reliability analysis results (n = 1007).
Using SPSS 22.0, exploratory factor analysis was conducted through the Kaiser–Meyer–Olkin (KMO) and Bartlett’s sphericity test to determine the presence of adequate correlations for factor extraction [80]. As shown in Table 5, the KMO values for the variables ranged from 0.701 to 0.716, all exceeding the threshold of 0.5. Additionally, the significance of the Bartlett sphericity test was less than 0.05 and approached zero for all variables, indicating that the test results were significant. This suggests a solid foundation for factor analysis [81]. Consequently, principal component analysis was further employed for factor analysis of the variables. The results revealed that each variable could only extract one factor with an eigenvalue greater than 1, while the cumulative variance contribution for all variables exceeded 50%. This indicates that the factors identified in this study can effectively explain the variables. Moreover, the commonality for all items was greater than 0.5 and the factor loadings exceeded 0.6, falling within the range suggested in prior research [82]. Therefore, the authors conclude that the survey results demonstrate good unidimensionality.
Table 5.
Exploratory factor analysis result (n = 1007).
Using AMOS for confirmatory factor analysis, we found that the factor loadings for each scale item exceeded 0.5. This indicates that all items consistently explain their corresponding variables. Such consistency not only implies that the items effectively reflect the essence of the variables, but also suggests that the scale demonstrates high stability and reliability in the measurement of those variables [83]. Based on the factor loadings, we calculated the composite reliability (CR) and average variance extracted (AVE). The CR must not be lower than 0.7, while the minimum standard for AVE was set at 0.5 [84,85]. The results presented in Table 6 show that the factor loadings in this study are all greater than 0.5, the CR values are above 0.78, and the square root of the AVE values exceeds 0.5, indicating that the related variables exhibit good convergent validity.
Table 6.
Convergent factor analysis results (n = 1007).
Discriminant validity refers to the differences between various latent variables. According to Fornell and Larcker’s recommendations, all values should not exceed 0.9 to indicate that the scale exhibits good discriminant validity [85]. As shown in Table 7, the latent variables exceed the coefficients between each latent variable, none of which exceed 0.9. Thus, there is a significant correlation among all variables, suggesting strong discriminant validity. Consequently, the measurement model demonstrates good discriminant validity.
Table 7.
Correlation coefficient and average extraction variance (n = 1007).
4.3. Model Testing
The fit indices derived from the confirmatory factor analysis are also crucial indicators for assessing scale validity. According to Hu’s recommendations, a Chi-squared degrees of freedom ratio below 5, an RMSEA value less than 0.08, and an SRMR value under 0.08 are the thresholds indicating good fit. Additionally, GFI, AGFI, NFI, and CFI values greater than 0.9 further suggest a well-fitting model [86]. As shown in Table 8, all indices of the model fall within the recommended ranges, indicating a high degree of fit between the model and the data. Therefore, it was concluded that the scale possesses good structural validity.
Table 8.
Model fit measures.
4.4. Path Hypothesis Analysis
Using PLS-SEM to test the hypotheses and calculate path coefficients, we employed the Bootstrap method for 5000 resamples. The research values below 0.05 were statistically significant. Thus, as seen in Table 9, the path coefficient test results indicated that user scale significantly and positively affects perceived importance (T = 82.215, p < 0.05), post-experience regret (T = 65.9, p < 0.05), and user driving habits (T = 11.162, p < 0.05), providing support for hypotheses H1, H2, and H3. Furthermore, perceived importance positively and significantly influences user driving habits (T = 11.749, p < 0.05) and continued usage intention (T = 4.296, p < 0.05), supporting hypotheses H4 and H5. Post-experience regret negatively impacts user driving habits (T = 9.477, p < 0.05) and has negative significance (T = 1.772, p ≥ 0.05), supporting hypothesis H6. However, it shows no significant negative correlation with continued usage intention, resulting in the non-acceptance of hypothesis H7. User driving habits positively affect continued usage intention (T = 5.906, p < 0.05), supporting hypothesis H8. The findings also reveal that economic benefits (T = 2.756, p < 0.05), technical stability (T = 3.92, p < 0.05), after-sales service (T = 2.354, p < 0.05), ethical factors (T = 4.88, p < 0.05), and social factors (T = 3.109, p < 0.05) directly influence users’ intentions for continued usage, while safety capability (T = 0.819, p ≥ 0.05) shows no direct impact. Table 9 summarizes the hypothesis testing results.
Table 9.
Hypothesis model path relationship test.
The significant hypothesis testing results are presented in the table and shown in Figure 2.
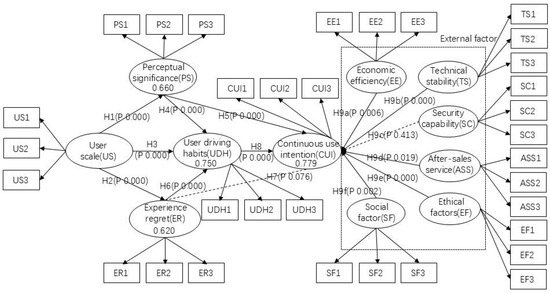
Figure 2.
Hypothesis test results.
5. Discussion
As autonomous driving systems continue to expand to various user demographics, a disparity is arising among different automotive manufacturers and autonomous taxi companies in the market. Therefore, it is essential to investigate the relationship between autonomous driving systems and user driving habits, as well as the intention for continued use. Additionally, this study aimed to identify the variable factors influencing users’ intent to continue their usage through relevant control variables. In response to this current situation, this paper combined habit theory and regret theory to construct a model of user intention for the continued use of autonomous driving systems. It explored the impact mechanisms of user scale, perceived importance, and experience regret on users’ driving habits and intent for continued usage. Through online surveys conducted in cities operating autonomous taxis (Beijing, Shanghai, Guangzhou), we employed structural equation modeling to analyze sample data, leading to the following conclusions:
- (1)
- According to the data from the hypothesized model, user driving habits (T = 5.906) have the most significant influence on the intention for continued use. In other words, user driving habits are a crucial determinant of the continued use of autonomous driving systems. The data also indicate that user scale (T = 11.162), perceived importance (T = 11.749), and experience regret (T = 9.477) significantly affect user driving habits. However, based on the T-value analysis, the higher the T-value, the greater the significance [87], suggesting that user scale and perceived importance have a more substantial impact on user driving habits. Unlike previous research models that treated habits as moderating variables [45], this paper addressed habits as mediating variables connecting user scale, perceived importance, experience regret, and intent for continued use, thereby emphasizing the importance of user driving habits in the practical application of autonomous driving systems and further validating the rationale for considering driving habits as mediating variables;
- (2)
- User perceptions of importance and experiences of regret significantly influence the formation of driving habits. However, from a data significance standpoint, the impact of the perceived importance of the autonomous driving system on driving habits (T = 11.749) is significant, while the hypothesis regarding the influence of the experience of regret on continued usage intention is invalid. This indicates that users clearly and positively intend to continue using the system based on rational perceptions, whereas effective experiences do not hold the same weight. This viewpoint aligns with Davis’s assertion about the significant correlation between user perceptions and both current and future usage [36]. It suggests that users are more concerned with the actual functionalities and practicality of autonomous driving systems. Therefore, promotion of the autonomous driving system should emphasize their perceived usefulness and perceived ease of use, taking a practical approach to users’ understanding of the system. Although experience of regret does not significantly affect continued usage intention, it does have a notably negative correlation with the formation of driving habits. This underscores the rationale behind the experience of regret variable, inspired by Kang et al.‘s research which explored and validated emotional experiences following user regret, distinctly distinguishing it from traditional models of positive experiences like satisfaction [72];
- (3)
- User scale directly or indirectly influences continued usage intentions through its effects on perceived importance, experience of regret, and driving habits. Currently, the literature lacks viewpoints on the direct impact of user scale on continued usage intention. Perspectives on the indirect effects of user scale on continued usage intention are also scarce. Therefore, by investigating the relationship between autonomous driving systems and users’ continued usage intentions, this study validates the theoretical mechanisms underlying the influence of user scale on continued usage intention;
- (4)
- The control variables, apart from safety capability factors, economic benefits, technological stability, after-sales service, ethical concerns, and social impacts, all demonstrate a significant correlation with users’ continued use of autonomous driving systems. However, the variable of safety capability revealed a non-significant relationship. This may be due to respondents’ perceptions that existing autonomous driving systems inadequately ensure safety. Considering the three questions posed, respondents did not believe that autonomous systems can anticipate or sense dangers beforehand, nor can they guarantee the driver’s safety, which did not significantly affect users’ intention to continue using the system. Related studies indicate that, in partially automated vehicles, drivers are more likely to take control in the face of predictable failures (such as severe weather or vehicle stoppage) compared to unpredictable failures (such as algorithm errors), and users tend to trust their driving skills more [88]. In other words, users have greater confidence in their driving abilities. Therefore, users view the system’s capability to predict danger as having a non-significant influence on their intention to continue usage, implying that it does not affect user engagement due to users’ preference for taking control at critical moments. Conversely, other factors exert a significant effect. Notably, ethical considerations regarding the reasonableness of emergency handling (T = 4.88) are of greater concern, indicating that users are more focused on accountability issues after accidents as they trust their judgment more in critical driving situations. This perspective aligns with Lu’s view on the substantial gap between autonomous driving and experienced drivers [89]. Additionally, it may suggest that the impact of autonomous driving systems’ safety capability on the intention to continue usage is not direct. Moreover, the notion that the safety capability of autonomous driving systems does not significantly influence users’ intention to continue using it resonates with the viewpoint of Sina that perceived safety during automation does not significantly affect drivers [90].
This paper makes a theoretical contribution to the study of users’ intention to continue using autonomous driving systems. It considers user scale, perceived importance, and experience regret as antecedent variables, while user driving habits serve as the mediating variables. This research explored users’ intention to continue use and introduced control variables to enhance the stability of the model prediction results.
6. Theoretical and Implications
This study validates the relationship between modeled path dependencies and users’ intention to continue utilizing autonomous driving systems. It simulates users’ behavior regarding continuous intention by using factors such as user scale, perceived importance, and experience of regret, while also incorporating the related factors of autonomous driving systems for validation. The findings indicate that user scale, perceived importance, and the experience of regret significantly influence driving habits. Furthermore, perceived importance and experience of regret directly affect users’ intention for continued use. Additionally, control variables including economic, technological, aftermarket, ethical, and social factors also significantly influence intentions for continued use.
- (1)
- From a practical perspective, user scale, perceived importance, and experience of regret not only foster the formation of driving habits, but more importantly, directly or indirectly, influence users’ intention for continued use, thereby promoting the advancement, enhancement, and development of autonomous driving systems. The model validation results show a significant correlation between user scale and perceived importance, experience of regret, and driving habits. Significant correlations exist between perceived importance, experience of regret, and driving habits. A notable connection appears between perceived importance, driving habits, and continuous use intention. The control variables of economic, technological, aftermarket, ethical, and social factors also exhibit correlations with continuous use intention, indicating that users’ perceptions and experiences, alongside factors related to their driving systems, have direct or indirect effects on users;
- (2)
- From a theoretical perspective, this paper contributes to the literature by modeling the antecedent variables of perceived importance, experience of regret, and user scale, while using user driving habits as a mediating variable in the study of users’ continuous usage intentions. It also incorporates control variable factors that influence autonomous driving systems. The research findings indicate that perceived importance, experience of regret, and user scale directly affect the formation of users’ driving habits, while perceived importance and user driving habits directly influence the formation of continuous usage intentions. Furthermore, the introduction of control variables ensures the stability of the model;
- (3)
- The purpose of this study extends beyond examining users’ continuous usage intentions for autonomous driving systems, as it aims to provide references and insights for the improvement and development of autonomous driving systems. Additionally, it offers a new theoretical framework for behavioral studies on habit theory and experience of regret theory.
Therefore, subsequent theoretical research will not be influenced by a range of other research subjects. On one hand, the findings of this research can be used to validate the theoretical model of users’ continuous usage intentions for autonomous driving systems in the China region. On the other hand, the study of the relationship between autonomous driving systems and continuous usage by users contributes a valuable reference framework.
Consequently, based on quantitative data analysis, this research constructs a model concerning the relationship between autonomous driving systems and users’ continuous usage intentions. It proposes a model framework with user scale, perceived importance, and user regret as antecedent variables, user driving habits as a mediating variable, and economic, technological, safety, after-sales, ethical, and social factors as the control variables for users’ continuous usage intentions. The research results facilitate the improvement and development of autonomous driving systems. In terms of the findings, enhancing users’ continuous usage intentions is a primary focus for improving autonomous driving systems. Based on this, the advancement of relevant control factors in autonomous driving systems poses a significant future direction for development, alongside the updating of these systems according to existing market conditions and user needs. Additionally, during the promotion of autonomous driving systems, experiences that enhance the perceived usefulness and perceived ease of use can be provided to users, ultimately leading to the acknowledgment of autonomous driving systems from the perspective of usability and practical value, thus forming users’ driving habits and continuous usage behaviors. Based on this, the aim is to better serve users’ driving experiences and develop autonomous driving systems, which is the goal and expectation of this research.
7. Conclusions
This study provides a theoretical model of users’ intention to continue using autonomous driving systems. Based on this, it constructs a model focusing on users’ intention to continue use, which is influenced by user scale, perceived importance, user experience regret, and driving habits. Additionally, it examines the effects of perceived importance and experience of regret on users’ driving habits and continuous intention to use. Furthermore, the model includes different dimensions of control variables: economic, technological, safety, after-sales, ethical, and social factors. It reflects how antecedent variables (user scale, perceived importance, experience regret), mediating variables (user driving habits), and control variables (economic, technological, safety, after-sales, ethical, social factors) influence users’ behavior with regard to the continuous use of autonomous driving systems. This research can promote and significantly enhance the improvement and development of autonomous driving systems, while also contributing to the sustainable development of urban transportation and the sustainable use of energy.
Consequently, the empirical data from this study confirm that user scale, perceptions and experiences, behavioral habits, and external factors have a significant direct or indirect impact on users’ continued usage behavior. This provides meaningful insights and references for the development of autonomous driving systems and their future applications in urban transportation and energy conservation. Therefore, investigating users’ intentions for the sustained use of autonomous driving systems is not only a technical exploration of sustainable urban transportation development and energy sustainability, but also comprehensively considers various social, environmental, and technological factors. By continuously optimizing and improving autonomous driving technology, we can provide robust support for the achievement of a more sustainable urban transportation system.
This study has several limitations. The questionnaire data were collected online and this method likely attracted more responses from younger and middle-aged individuals. Moreover, the data collection for the autonomous taxi surveys was primarily focused on cities like Beijing, Shanghai, and Guangzhou. Therefore, the demographic characteristics of the sample may be skewed, and have a smaller proportion of elderly respondents. Older adults often have a rigid understanding of driving and using vehicles, which leads to slower acceptance of emerging concepts and methods related to autonomous driving. As China becomes a more aging society, the elderly population will continue to grow. Thus, it is increasingly important to pay attention to the consumer needs of older adults.
Author Contributions
Conceptualization, J.M.; methodology, J.M. and L.Z.; data curation, J.M. and L.Z.; writing—original draft preparation, J.M.; writing—review and editing, J.M. and C.Y. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
The study was conducted in accordance with the Declaration of Helsinki, and approved by the Institutional Review Board of School of Fine Arts Naniing Normal University (protocol code NO.NNU SFA-E-2024-004 and date 19 June 2024 of approval).
Informed Consent Statement
Not applicable.
Data Availability Statement
The original contributions presented in the study are included in the article, further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Yuan, K. Analysis of the current development and future prospect of autonomous driving. Appl. Comput. Eng. 2024, 45, 147–151. [Google Scholar] [CrossRef]
- Mishra, A.; Purohit, J.; Nizam, M.; Gawre, S.K. Recent Advancement in Autonomous Vehicle and Driver Assistance Systems. In Proceedings of the 2023 IEEE International Students’ Conference on Electrical, Electronics and Computer Science (SCEECS), Bhopal, India, 18–19 February 2023; pp. 1–5. [Google Scholar]
- Guo, R.; Vallati, M.; Wang, Y.; Zhang, H.; Chen, Y.; Wang, F.-Y. Sustainability Opportunities and Ethical Challenges of AI-Enabled Connected Autonomous Vehicles Routing in Urban Areas. IEEE Trans. Intell. Veh. 2024, 9, 55–58. [Google Scholar] [CrossRef]
- Wu, H.; Calderon, A.D. A Summary of the Development of Autonomous Vehicle. In Proceedings of the 2023 6th International Conference on Robotics, Control and Automation Engineering (RCAE), Suzhou, China, 3–5 November 2023; pp. 174–180. [Google Scholar]
- Lu, S.; Shi, W. The Emergence of Vehicle Computing. IEEE Internet Comput. 2021, 25, 18–22. [Google Scholar] [CrossRef]
- Yang, B.; Monterola, C. Feasibility Study of Distributed Lightless Intersection Control with Level 1 Autonomous Vehicles. J. Urban Civ. Eng. 2016, 10, 1416–1420. [Google Scholar]
- Tena-Gago, D.; Wang, Q.; Alcaraz-Calero, J.M. Evaluation of Level 2 Automated Driving Artificial Intelligence Readiness in Simulated Scenarios. In Proceedings of the 6th ACM Computer Science in Cars Symposium, Ingolstadt, Germany, 8–9 December 2022; p. 3. [Google Scholar]
- Chen, L.; Tang, T.; Cai, Z.; Li, Y.; Wu, P.; Li, H.; Shi, J.; Yan, J.; Qiao, Y. Level 2 Autonomous Driving on a Single Device: Diving into the Devils of Openpilot. arXiv 2022, arXiv:2206.08176. [Google Scholar]
- Reid, T.G.R.; Neish, A.M.; Manning, B.J.A. Localization & Mapping Requirements for Level 2+ Autonomous Vehicles. In Proceedings of the 2023 International Technical Meeting of The Institute of Navigation, Long Beach, CA, USA, 24–26 January 2023. [Google Scholar]
- Firoz, K.; Seong, Y. Safety of Level 4 Autonomous Vehicle: Still Human in the Loop. In Proceedings of the 1st International Conference on Smart Mobility and Vehicle Electrification, Detroit, MI, USA, 10–12 October 2023; pp. 260–269. [Google Scholar] [CrossRef]
- Siegl, S.; Düser, T. Verification and Validation (V&V) for Safe Deployment of Automated Driving Systems–In Depth Evaluation of State-of-the-Art V&V Methods in the Automotive Sector. In Proceedings of the 2024 IEEE International Workshop on Metrology for Automotive (MetroAutomotive), Bologna, Italy, 26–28 June 2024; pp. 64–69. [Google Scholar]
- Khan, M.A.; Sayed, H.E.; Malik, S.; Zia, T.; Khan, J.; Alkaabi, N.; Ignatious, H. Level-5 Autonomous Driving—Are We There Yet? A Review of Research Literature. ACM Comput. Surv. 2022, 55, 27. [Google Scholar] [CrossRef]
- Maruf, A.; Kadir, R.E.A.; Gamayanti, N.; Santoso, A.; Bilfaqih, Y.; Sahal, M.; Hidayat, Z. L1 adaptive controller for unmanned surface vehicle type monohull LSS01 autopilot system and guidance design. IOP Conf. Ser. Earth Environ. Sci. 2021, 649, 012055. [Google Scholar] [CrossRef]
- Hovakimyan, N.; Cao, C. L1 Adaptive Control Theory-Guaranteed Robustness with Fast Adaptation; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2010. [Google Scholar]
- Snyder, S.; Zhao, P.; Hovakimyan, N.J.A. L1 Adaptive Control for Learn-to-Fly. arXiv 2021, arXiv:2108.08462. [Google Scholar]
- Блинкин, М.; Кулакoва, А. Беспилoтные автoмoбили: перспективы и oжидаемые пoследствия экспансии. Гoрoдские Исследoвания И Практики 2023, 8, 32–45. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.K.; Girshick, R.B.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 779–788. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.B.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 39, 1137–1149. [Google Scholar] [CrossRef]
- Rajput, N.S.; Mukesh; Mishra, A.; Sisodia, A.; Makarov, I. A novel autonomous taxi model for smart cities. In Proceedings of the 2018 IEEE 4th World Forum on Internet of Things (WF-IoT), Singapore, 5–8 February 2018; pp. 625–628. [Google Scholar]
- Liu, C.; Ferrari, S. Vision-guided Planning and Control for Autonomous Taxiing via Convolutional Neural Networks. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar]
- Nicolaides, D.; Cebon, D.; Miles, J. An autonomous taxi service for sustainable urban transportation. In Proceedings of the 2017 Smart City Symposium Prague (SCSP), Prague, Czech Republic, 25–26 May 2017; pp. 1–6. [Google Scholar]
- Liu, M.; Wu, J.; Zhu, C.; Hu, K. Factors Influencing the Acceptance of Robo-Taxi Services in China: An Extended Technology Acceptance Model Analysis. J. Adv. Transp. 2022, 2022, 8461212. [Google Scholar] [CrossRef]
- Liu, M.; Wu, J.; Zhu, C.; Hu, K. A Study on Public Adoption of Robo-Taxis in China. J. Adv. Transp. 2020, 2020, 8877499. [Google Scholar] [CrossRef]
- Ningappa, M.; Kumar, D.V.V. A Survey on Advanced Driving Assistance Systems for Safer Transportation. Int. J. Comput. Sci. Mob. Comput. 2018, 7, 17–24. [Google Scholar]
- Indu, K.; Aswatha Kumar, M. Electric Vehicle Control and Driving Safety Systems: A Review. IETE J. Res. 2023, 69, 482–498. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A.J.C. Very Deep Convolutional Networks for Large-Scale Image Recognition. arXiv 2014, arXiv:1409.155. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]
- Vasebi, S.; Hayeri, Y.M.; Samaras, C.; Hendrickson, C. Low-Level Automated Light-Duty Vehicle Technologies Provide Opportunities to Reduce Fuel Consumption. Transp. Res. Rec. J. Transp. Res. Board 2018, 2672, 60–74. [Google Scholar] [CrossRef]
- Costache, S.; Gulisano, V.; Papatriantafilou, M. Understanding the data-processing challenges in Intelligent Vehicular Systems. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gotenburg, Sweden, 19–22 June 2016; pp. 611–618. [Google Scholar]
- Koopman, P.; Wagner, M. Challenges in Autonomous Vehicle Testing and Validation. SAE Int. J. Trans. Saf. 2016, 4, 15–24. [Google Scholar] [CrossRef]
- Beringhoff, F. Towards realizing test conditions for automated vehicles. In Proceedings of the 25th International Conference on Model Driven Engineering Languages and Systems: Companion Proceedings, Montreal, QC, Canada, 16–21 October 2022; pp. 152–157. [Google Scholar]
- Robinson, J.; Smyth, J.; Woodman, R.; Donzella, V. Ethical considerations and moral implications of autonomous vehicles and unavoidable collisions. Theor. Issues Ergon. Sci. 2022, 23, 435–452. [Google Scholar] [CrossRef]
- Bonnefon, J.-F.; Shariff, A.; Rahwan, I. The social dilemma of autonomous vehicles. Science 2016, 352, 1573–1576. [Google Scholar] [CrossRef]
- Jing, P.; Xu, G.; Chen, Y.; Shi, Y.; Zhan, F. The Determinants behind the Acceptance of Autonomous Vehicles: A Systematic Review. Sustainability 2020, 12, 1719. [Google Scholar] [CrossRef]
- Baccarella, C.V.; Wagner, T.F.; Scheiner, C.W.; Maier, L.; Voigt, K.-I. Investigating consumer acceptance of autonomous technologies: The case of self-driving automobiles. Eur. J. Innov. Manag. 2021, 24, 1210–1232. [Google Scholar] [CrossRef]
- Davis, F.D. Perceived Usefulness, Perceived Ease of Use, and User Acceptance of Information Technology. MIS Q. 1989, 13, 319–340. [Google Scholar] [CrossRef]
- Park, E.; Kim, H.; Ohm, J.Y. Understanding driver adoption of car navigation systems using the extended technology acceptance model. Behav. Inf. Technol. 2015, 34, 741–751. [Google Scholar] [CrossRef]
- Venkatesh, V.; Morris, M.G.; Davis, G.B.; Davis, F.D. User Acceptance of Information Technology: Toward a Unified View. MIS Q. 2003, 27, 425–478. [Google Scholar] [CrossRef]
- Isa, M.H.; Deros, B.; Abu Kassim, K.A. A Review of Empirical Studies on User Acceptance of Driver Assistance Systems. J. Bus. Soc. Sci. Rev. 2015, 3, 39–46. [Google Scholar]
- Hutchins, N.F.; Kerr, A.J.; Hook, L.R. User Acceptance in Autonomous Vehicles: The Evolution of the End User. In Proceedings of the 2019 International Symposium on Systems Engineering (ISSE), Edinburgh, UK, 1–3 October 2019; pp. 1–8. [Google Scholar]
- Hussain, R.; Zeadally, S. Autonomous Cars: Research Results, Issues, and Future Challenges. IEEE Commun. Surv. Tutor. 2019, 21, 1275–1313. [Google Scholar] [CrossRef]
- Chin, J.; Lin, S.-C. A Behavioral Model of Managerial Perspectives Regarding Technology Acceptance in Building Energy Management Systems. Sustainability 2016, 8, 641. [Google Scholar] [CrossRef]
- Mathieson, K.; Peacock, E.; Chin, W.W. Extending the technology acceptance model: The influence of perceived user resources. ACM SIGMIS Database Database Adv. Inf. Syst. 2001, 32, 86–112. [Google Scholar] [CrossRef]
- Venkatesh, V.; Davis, F.D. A Theoretical Extension of the Technology Acceptance Model: Four Longitudinal Field Studies. Manag. Sci. 2000, 46, 186–204. [Google Scholar] [CrossRef]
- Limayem, M.; Hirt, S.; Cheung, C. How Habit Limits the Predictive Power of Intention: The Case of Information Systems Continuance. MIS Q. 2007, 31, 705–737. [Google Scholar] [CrossRef]
- Butakov, V.A.; Ioannou, P. Driving Autopilot with Personalization Feature for Improved Safety and Comfort. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015; pp. 387–393. [Google Scholar]
- Hasenjäger, M.; Heckmann, M.; Wersing, H. A Survey of Personalization for Advanced Driver Assistance Systems. IEEE Trans. Intell. Veh. 2020, 5, 335–344. [Google Scholar] [CrossRef]
- Kalabic, U.; Chakrabarty, A.; Quirynen, R.; Di Cairano, S. Learning autonomous vehicle passengers’ preferred driving styles using g-g plots and haptic feedback. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 4012–4017. [Google Scholar]
- Barbosa, P.; Ferreira, F.; Fernandes, C.; Erlhagen, W.; Guimarães, P.; Wojtak, W.; Monteiro, S.; Bicho, E. Endowing Intelligent Vehicles with the Ability to Learn User’s Habits and Preferences with Machine Learning Methods. In Proceedings of the International Conference on Intelligent Data Engineering and Automated Learning, Manchester, UK, 24–26 November 2022; pp. 157–169. [Google Scholar]
- Samson, B.P.V.; Sumi, Y. Exploring Factors that Influence Connected Drivers to (Not) Use or Follow Recommended Optimal Routes. In Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, Glasgow, UK, 4–9 May 2019; p. 371. [Google Scholar]
- Brette, O.; Buhler, T.; Lazaric, N.; Marechal, K. Reconsidering the nature and effects of habits in urban transportation behavior. J. Institution. Econ. 2014, 10, 399–426. [Google Scholar] [CrossRef]
- Chen, Y.; Mao, S.S.; Pan, X.Y.; Xu, Y.H. Understanding the Post-adoption Behavior:The Influence of Users’ Habits on Continuance Usage. Chin. J. Manag. 2014, 3, 408–415. [Google Scholar]
- Guinea, A.O.d.; Markus, M.L. Why break the habit of a lifetime? rethinking the roles of intention, habit, and emotion in continuing information technology use. MIS Q. 2009, 33, 433–444. [Google Scholar] [CrossRef]
- Bhattacherjee, A. Understanding Information Systems Continuance: An Expectation-Confirmation Model. MIS Q. 2001, 25, 351–370. [Google Scholar] [CrossRef]
- Kim, H.-W.; Chan, H.C.; Chan, Y.P. A balanced thinking–feelings model of information systems continuance. Int. J. Hum.-Comput. Stud. 2007, 65, 511–525. [Google Scholar] [CrossRef]
- Venkatesh, V.; Thong, J.Y.L.; Xu, X. Consumer Acceptance and Use of Information Technology: Extending the Unified Theory of Acceptance and Use of Technology. MIS Q. 2012, 36, 157–178. [Google Scholar] [CrossRef]
- Zhang, S.; Jing, P.; Xu, G. The Acceptance of Independent Autonomous Vehicles and Cooperative Vehicle-Highway Autonomous Vehicles. Information 2021, 12, 346. [Google Scholar] [CrossRef]
- Ribeiro, M.A.; Gursoy, D.; Chi, O.H. Customer Acceptance of Autonomous Vehicles in Travel and Tourism. J. Travel Res. 2021, 61, 620–636. [Google Scholar] [CrossRef]
- Choi, J.K.; Ji, Y.G. Investigating the Importance of Trust on Adopting an Autonomous Vehicle. Int. J. Hum.-Comput. Interact. 2015, 31, 692–702. [Google Scholar] [CrossRef]
- Yuen, K.F.; Ma, F.; Wang, X.; Lee, G. The role of trust in influencing consumers’ adoption of automated vehicles: An application of the health belief model. Int. J. Sustain. Transp. 2021, 15, 837–849. [Google Scholar] [CrossRef]
- Maklan, S.; Antonetti, P.; Whitty, S. A Better Way to Manage Customer Experience:Lessons from the Royal Bank of Scotland. Calif. Manag. Rev. 2017, 59, 92–115. [Google Scholar] [CrossRef]
- Väätäjä, H. Factors affecting user experience in mobile systems and services. In Proceedings of the 10th International Conference on Human Computer Interaction with Mobile Devices and Services, Amsterdam, The Netherlands, 2–5 September 2008; p. 551. [Google Scholar]
- Karapanos, E.; Hassenzahl, M.; Martens, J.-B. User experience over time. In Proceedings of the CHI ‘08 Extended Abstracts on Human Factors in Computing Systems, Florence, Italy, 5–10 April 2008; pp. 3561–3566. [Google Scholar]
- Lee, Y.-H.; Littles, C. The more the merrier? The effects of system-aggregated group size information on user’s efficacy and intention to participate in collective actions. Internet Res. 2021, 31, 191–207. [Google Scholar] [CrossRef]
- Baroudi, J.J.; Olson, M.H.; Ives, B. An empirical study of the impact of user involvement on system usage and information satisfaction. Commun. ACM 1986, 29, 232–238. [Google Scholar] [CrossRef]
- Kjærgaard, M.B. Studying Sensing-Based Systems: Scaling to Human Crowds in the Real World. IEEE Internet Comput. 2013, 17, 80–84. [Google Scholar] [CrossRef]
- Bokhari, R.H. The relationship between system usage and user satisfaction: A meta-analysis. J. Enterp. Inf. Manag. 2005, 18, 211–234. [Google Scholar] [CrossRef]
- Yaffe, P. How to Generate Reader Interest in What You Write. Ubiquity 2009, 2009, 1. [Google Scholar] [CrossRef]
- Kim, G.-H.; Kim, Y.-J.; Yoon, J.-S. The structural relationships of application richness, brand awareness, user habit, user loyalty, and continuance intention in mobile application market. J. Korea Soc. Comput. Inf. 2013, 18, 141–152. [Google Scholar] [CrossRef]
- Lankton, N.K.; Wilson, E.V.; Mao, E. Antecedents and determinants of information technology habit. Inf. Manag. 2010, 47, 300–307. [Google Scholar] [CrossRef]
- Bell, D.E. Regret in Decision Making under Uncertainty. Oper. Res. 1982, 30, 961–981. [Google Scholar] [CrossRef]
- Kang, Y.S.; Hong, S.; Lee, H. Exploring continued online service usage behavior: The roles of self-image congruity and regret. Comput. Hum. Behav. 2009, 25, 111–122. [Google Scholar] [CrossRef]
- Choi, H.; Yu, S.-Y. The Impact of Continued Behavior on Real Usage: Focusing on Mobile Web. J. Korea Contents Assoc. 2008, 8, 27–38. [Google Scholar] [CrossRef]
- Verplanken, B. Beyond frequency: Habit as mental construct. Br. J. Soc. Psychol. 2006, 45, 639–656. [Google Scholar] [CrossRef]
- Aarts, H.H.; Verplanken, B.; Knippenberg, A. Predicting behavior from actions in the past: Repeated decision making or a matter of habit? J. Appl. Soc. Psychol. 1998, 28, 1355–1374. [Google Scholar] [CrossRef]
- Agarwal, R.; Karahanna, E. Time Flies When You’re Having Fun: Cognitive Absorption and Beliefs about Information Technology Usage. MIS Q. 2000, 24, 665–694. [Google Scholar] [CrossRef]
- Liu, L.; Lu, S.; Zhong, R.; Wu, B.; Yao, Y.; Zhang, Q.; Shi, W. Computing Systems for Autonomous Driving: State of the Art and Challenges. IEEE Internet Things J. 2021, 8, 6469–6486. [Google Scholar] [CrossRef]
- Jackson, D.L. Revisiting Sample Size and Number of Parameter Estimates: Some Support for the N:q Hypothesis. Struct. Equ. Model. A Multidiscip. J. 2003, 10, 128–141. [Google Scholar] [CrossRef]
- Lisawadi, S.; Ahmed, S.E.; Reangsephet, O.; Shah, M.K.A. Simultaneous estimation of Cronbach’s alpha coefficients. Commun. Stat.-Theory Methods 2019, 48, 3236–3257. [Google Scholar] [CrossRef]
- Gorsuch, R.L. Using Bartlett’s Significance Test to Determine the Number of Factors to Extract. Educ. Psychol. Meas. 1973, 33, 361–364. [Google Scholar] [CrossRef]
- Tobias, S.; Carlson, J.E. Brief Report: Bartlett’s Test of Sphericity and Chance Findings in Factor Analysis. Multivar. Behav. Res. 1969, 4, 375–377. [Google Scholar] [CrossRef]
- Kashiwagi, S. A New Proposition on Number of Factors and Communalities in Multiple-Factor Analysis. Jpn. Psychol. Res. 1964, 6, 173–175. [Google Scholar] [CrossRef][Green Version]
- Schmitt, T.A.; Sass, D.A.; Chappelle, W.; Thompson, W. Selecting the “Best” Factor Structure and Moving Measurement Validation Forward: An Illustration. J. Personal. Assess. 2018, 100, 345–362. [Google Scholar] [CrossRef] [PubMed]
- Churchill, G.A. A Paradigm for Developing Better Measures of Marketing Constructs. J. Mark. Res. 1979, 16, 64–73. [Google Scholar] [CrossRef]
- Fornell, C.; Larcker, D.F. Evaluating structural equation models with unobservable variables and measurement error. J. Mark. Res. 1981, 18, 39–50. [Google Scholar] [CrossRef]
- Hu, L.T.; Bentler, P.M. Cutoff criteria for fit indexes in covariance structure analysis: Conventional criteria versus new alternatives. Struct. Equ. Model. A Multidiscip. J. 1999, 6, 1–55. [Google Scholar] [CrossRef]
- Kock, N. A Note on How to Conduct a Factor-Based PLS-SEM Analysis. Int. J. e-Collab. 2015, 11, 9. [Google Scholar] [CrossRef]
- Hopkins, S.; DeGuzman, C.; Donmez, B. The Effect of Failure Predictability on Driver Takeover Performance and Monitoring Behavior in Partially Automated Vehicles. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2019, 63, 2109. [Google Scholar] [CrossRef]
- Lu, J.; Yang, S.; Ma, Y.; Shi, R.; Peng, Z.; Pang, Z.; Chen, Y.; Feng, X.; Wang, R.; Cao, R.; et al. Modeling Driver’s Real-Time Confidence in Autonomous Vehicles. Appl. Sci. 2023, 13, 4099. [Google Scholar] [CrossRef]
- Nordhoff, S.; Stapel, J.; He, X.; Gentner, A.; Happee, R. Do driver’s characteristics, system performance, perceived safety, and trust influence how drivers use partial automation? A structural equation modelling analysis. Front. Psychol. 2023, 14, 1125031. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).