
Optimizing Energy Consumption of Industrial Robots with Model-Based Layout Design
Abstract
:1. Introduction
- For energy-aware batch planning—over the long term: real-time optimization of operations scheduling/products and their allocation/robot for the entire batch of products to be executed based on the prediction of EC of robots for each type of operation; the minimization of the total energy consumed by all active robots is considered.
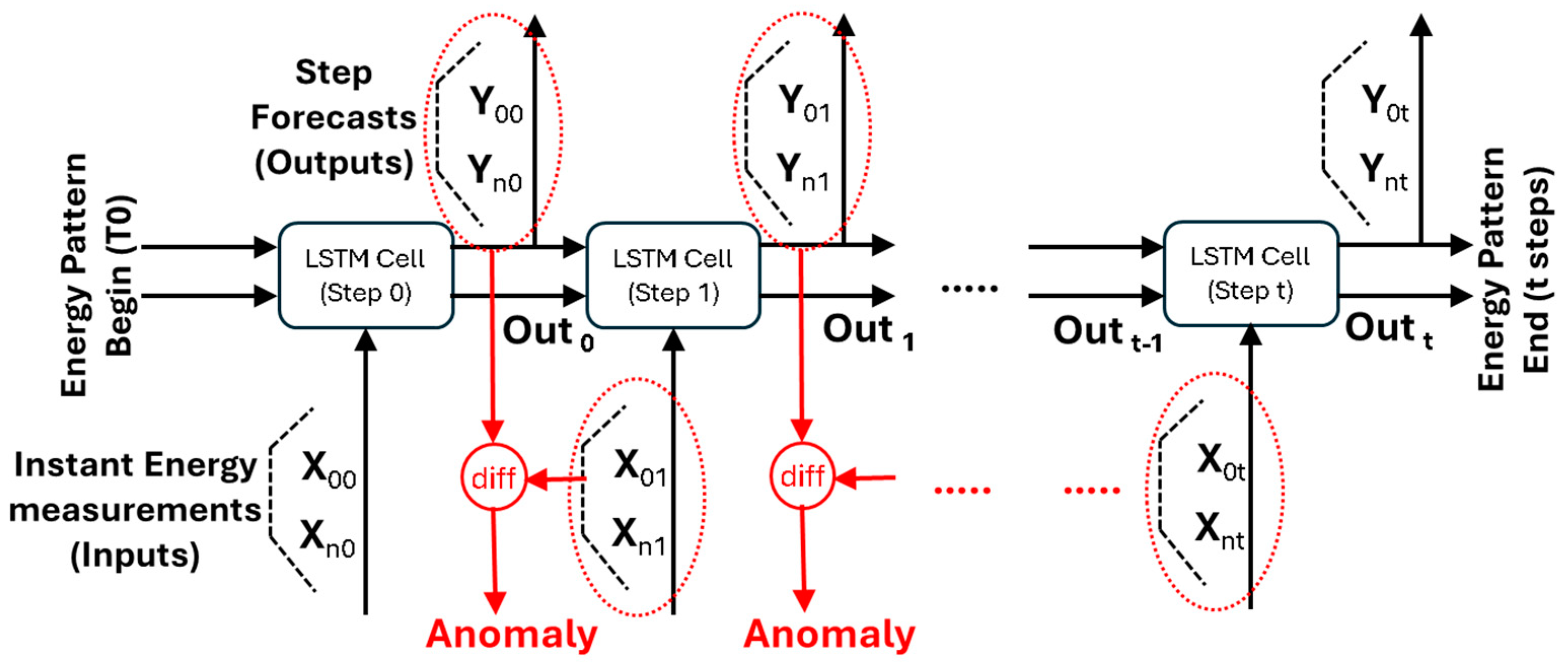
- For robot health monitoring—in the short term: whenever an anomaly or a significant increase in the energy consumed by a robot is detected, the resource is isolated and its maintenance program is launched.
- Updated by the prediction module each time the complete execution of an operation is recorded, and
- Read by the optimization module each time a new production schedule needs to be computed.
2. Energy Consumption and Formation of the Optimization Model
2.1. Overview of Factors Affecting Energy Consumption by Industrial Robots
- (a)
- Types of industrial robots (anthropomorphic, SCARA, Delta, Cartesian, etc.): The design of articulated arms allows the mechanical structure to perform complex tasks, and demands significant power to move and maintain stability, especially when handling heavy payloads or moving at high speeds. The continuous need to counteract gravity, particularly when operating along the Z axis to lift objects, further increases the EC. Unlike simpler robots (e.g., SCARA, Cartesian, and other task-specific structures) which have limited planes of movement, e.g., serving primarily in a horizontally plane, vertical articulated robots work more frequently against gravitational forces.
- (b)
- Physical factors such as weight and inertia (distribution of weight) of segments: to provide repeatability and rigidity, robot segments are manufactured of heavier materials which influence the motors’ dimensions and hence their EC. This category also includes the end-effector design and payload limitations.
- (c)
- Robot programming through path specification (minimize motion commands, create smooth trajectories with fewer stop points) and motion control (adjust speed, acceleration, and deceleration according to process specifications) reduces EC either directly, by limiting motor consumption or indirectly, through cycle time reduction. This is the case in applications where the end-effector and its active time impacts the total EC of the workstation (e.g., laser cutting, welding) [36,37].
- (d)
- Control components such as sensors, joint controllers, and end-effector actuators influence the overall EC of the robot system. This EC is directly proportional to the operating time as in the case of robots with welding equipment.
- (e)
- Environmental factors such as ambient temperature, moving constraints, trajectory points (linked motions consume more energy than non-linked ones [38]), trajectory precision (using final points which force the robot to stop at designed points is more energy intensive than using fly-by points which are used to bring the tool control point in a certain point vicinity, not reducing the robot speed to zero [12]).
- (f)
- Alternation between stand-by mode, which uses mechanic brakes and working state, where electric breaks are activated, greatly influences EC in industrial applications where equipment is enabled only during production time.
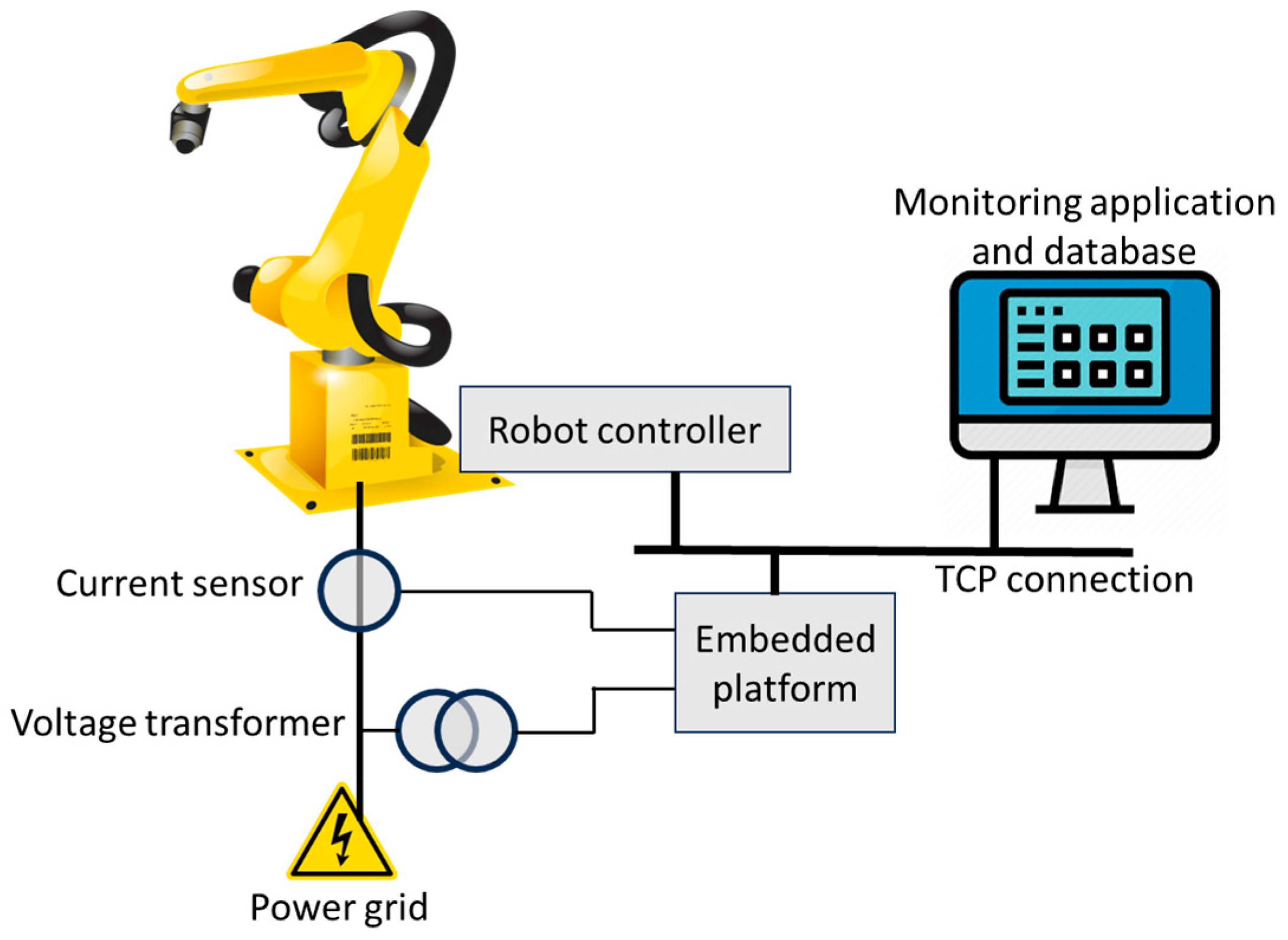
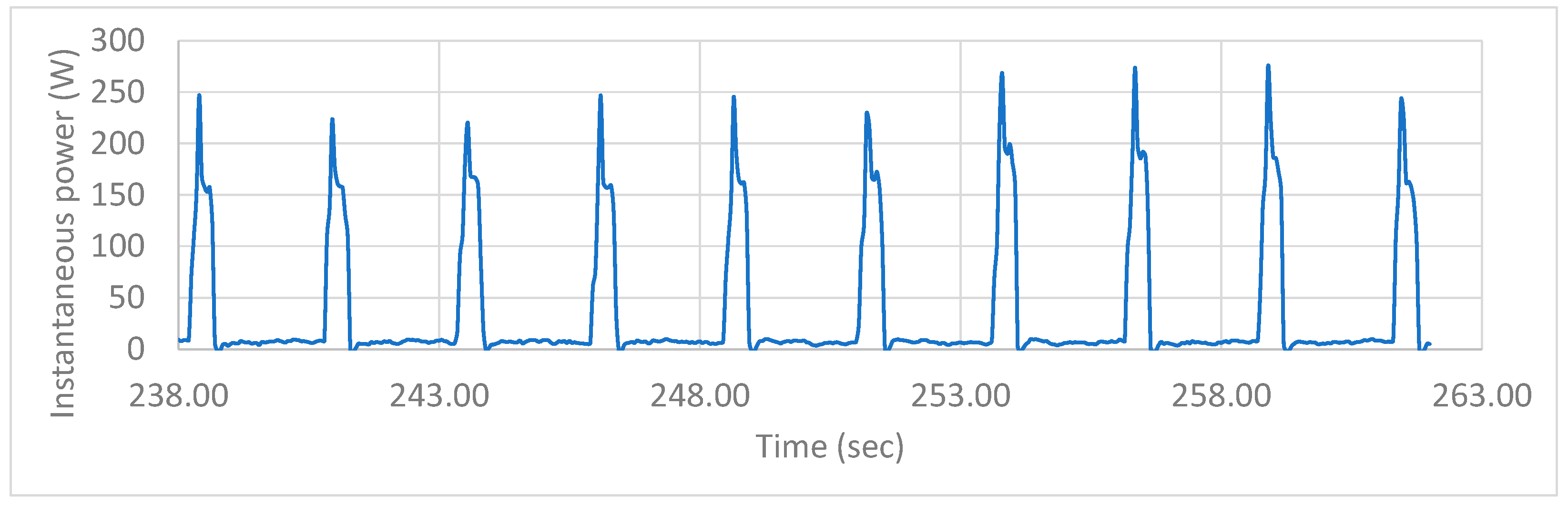
2.2. Measurement and Monitoring Technique
3. Energy-Efficient Design of Robotized Manufacturing Cells
- (a)
- The robot type, structure, and characteristics, along with the predefined points of interest for the trajectory, form the input data.
- (b)
- The position and orientation of the base segment represent the decisional variables.
- (c)
- The sum of all distances covered by each joint weighted by their speed limitation and specific EC represents the objective function.
- (d)
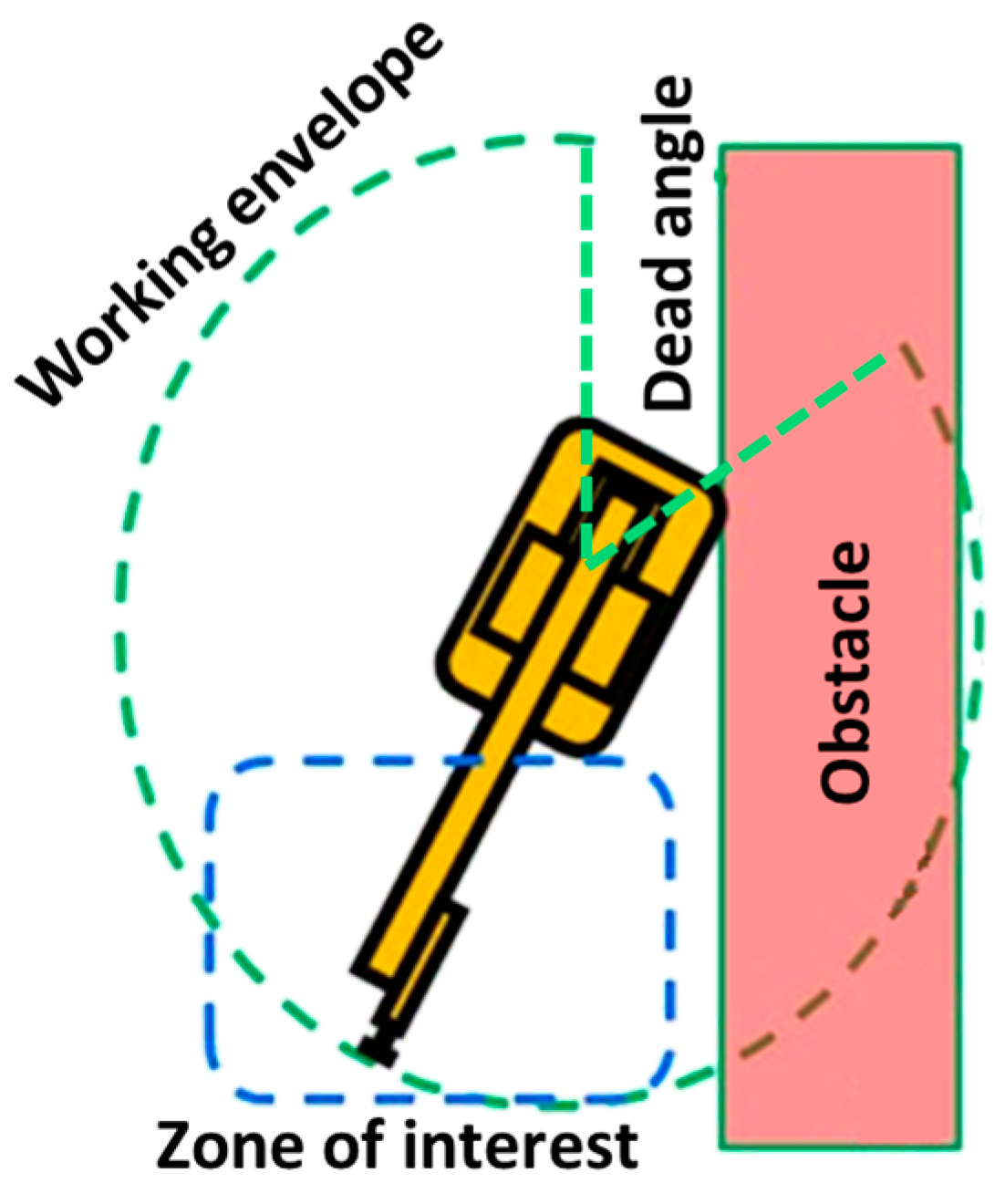
- The physical restrictions of the workstation define the constraints of the optimization problem (e.g., invalid robot configurations, singularities, obstacles, etc.).
- ,
- Robot working configuration in each point of interest on the robot trajectory,
- i
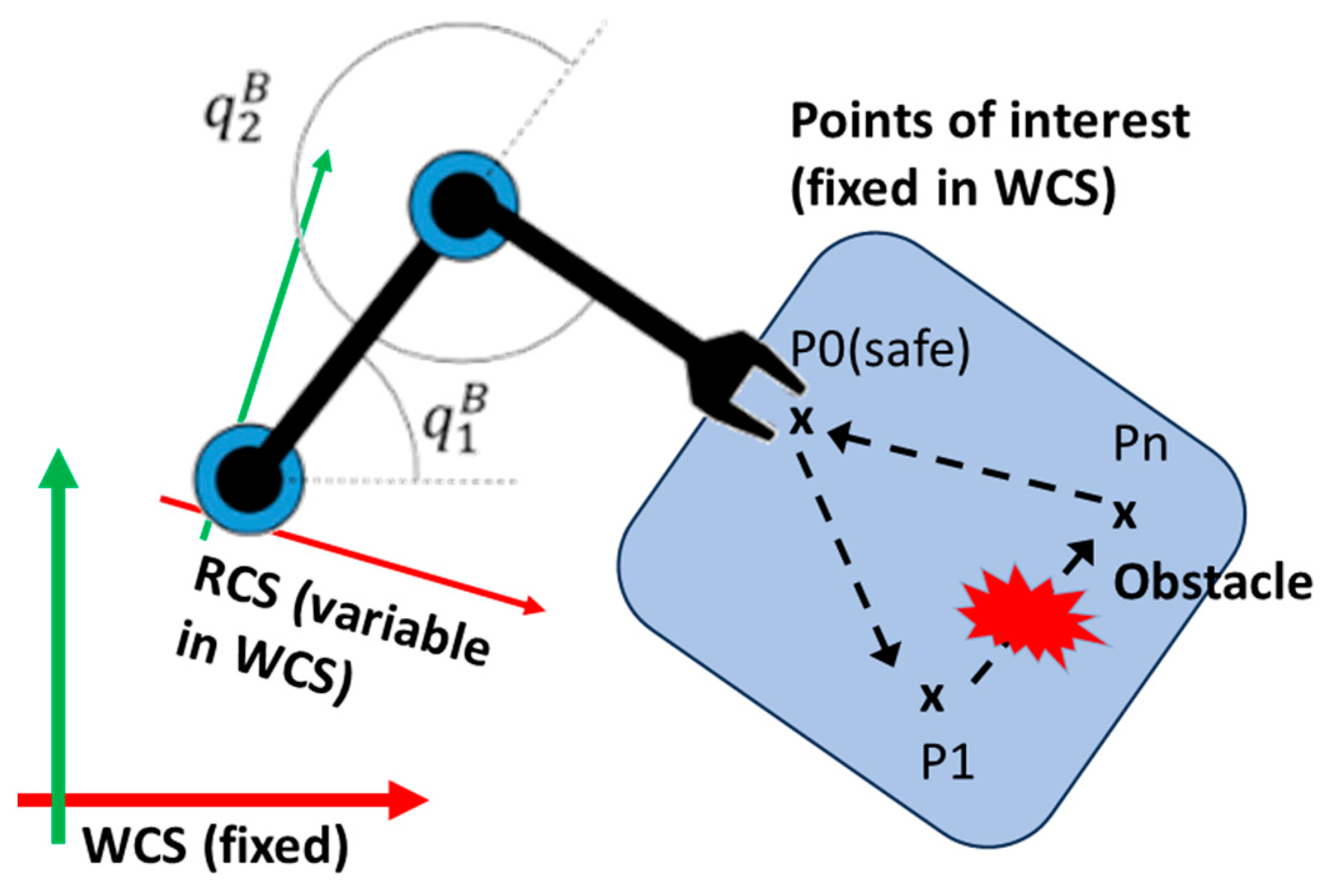
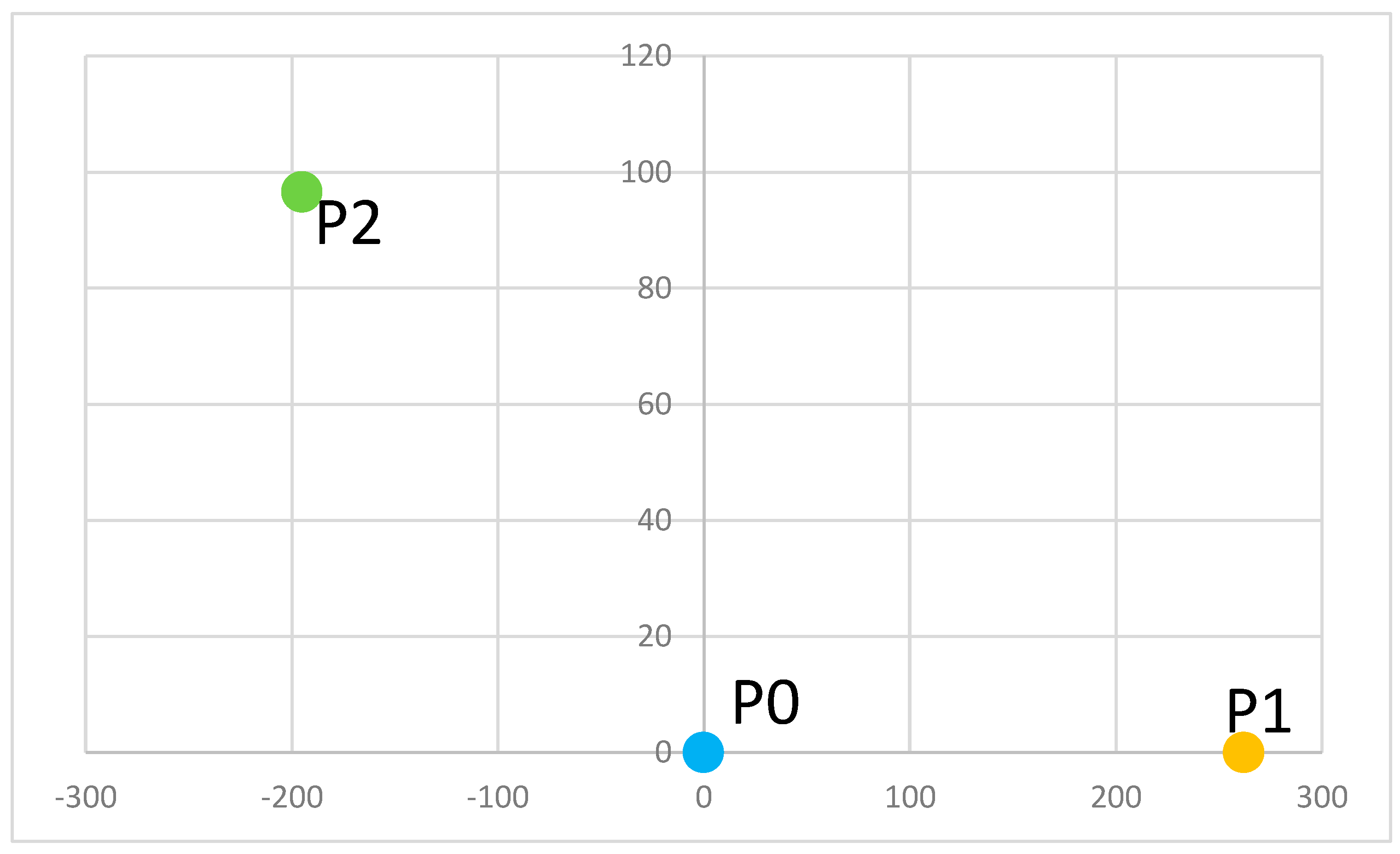
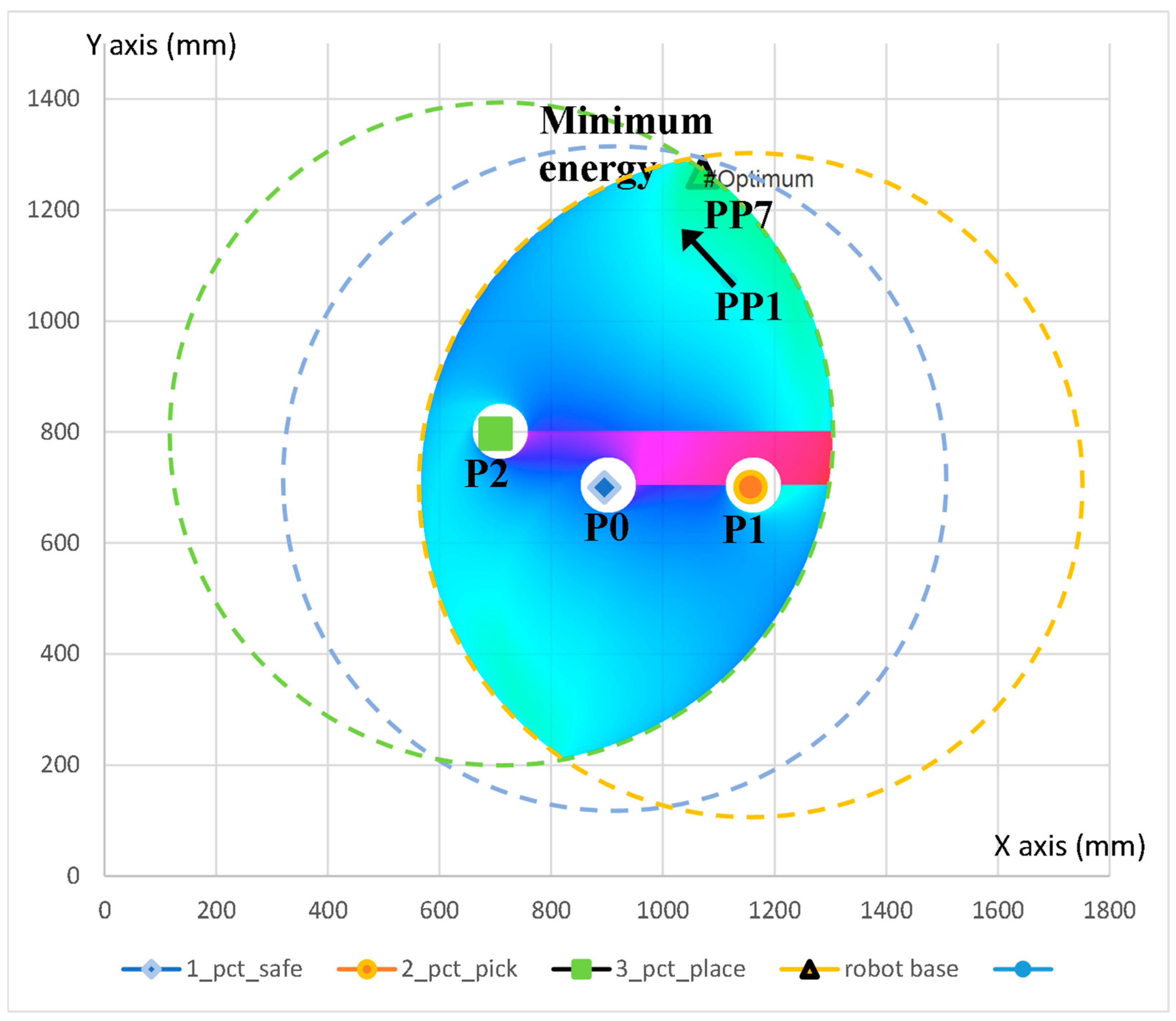
- The position and orientation of the trajectory points of interest expressed in the WCS – , n being the total number of points. In the present analysis, a minimum number of three interest points is considered for a pick-and-place motion sequence, where P0 is the safe position where the robot waits for cycle code, P1 is the picking position where the robot picks the object to be handled, and P2 is the placing position where the robot releases the object [39].
- ii
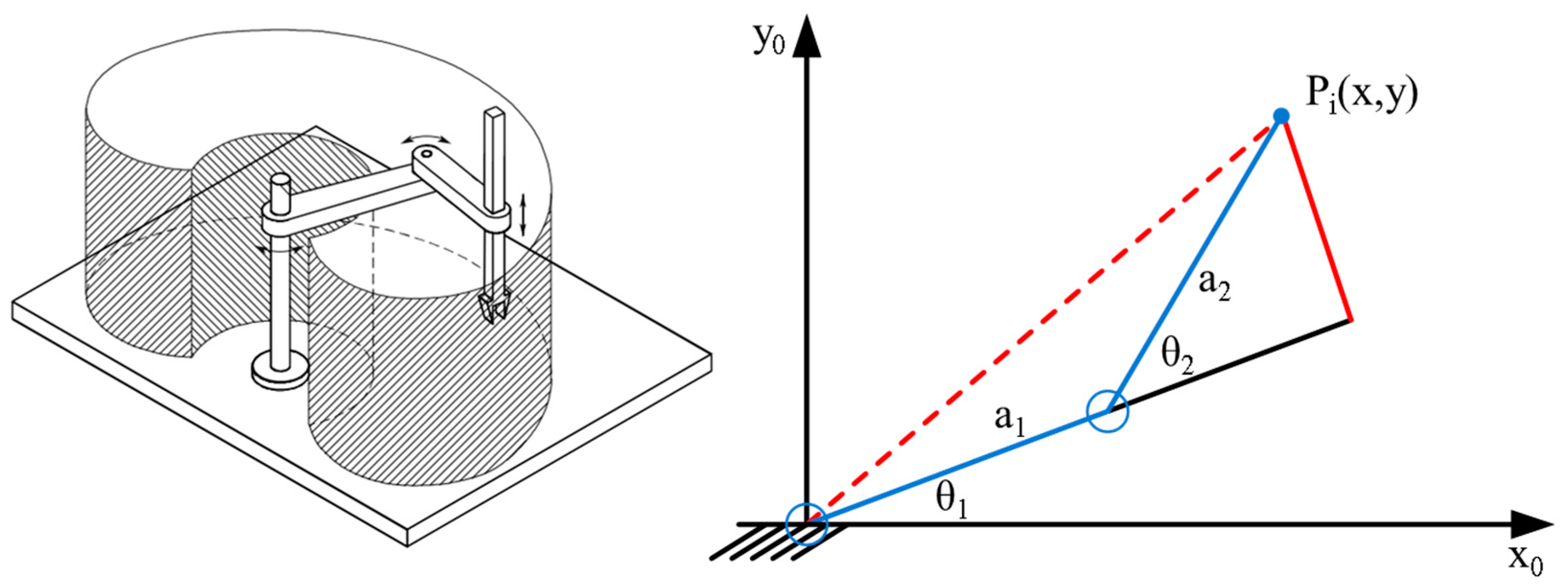
- The robot type (e.g., SCARA, vertical articulated, etc.), which defines the types and succession of simple joints (prismatic or revolute).
- iii
- The Denavit-Hartenberg parameters of the robot, depending on the dimensions (length) and relative orientation (twist angle) of its segments.
- iv
- The robot EC model used to transform motion data into energy information. Items ii and iii contribute to the computation of the IK function previously introduced, that expresses the robot points of interest from the WCS to the robot internal variables (joint) space.
4. Localization of the Points of Interest in the WCS
5. Case Study
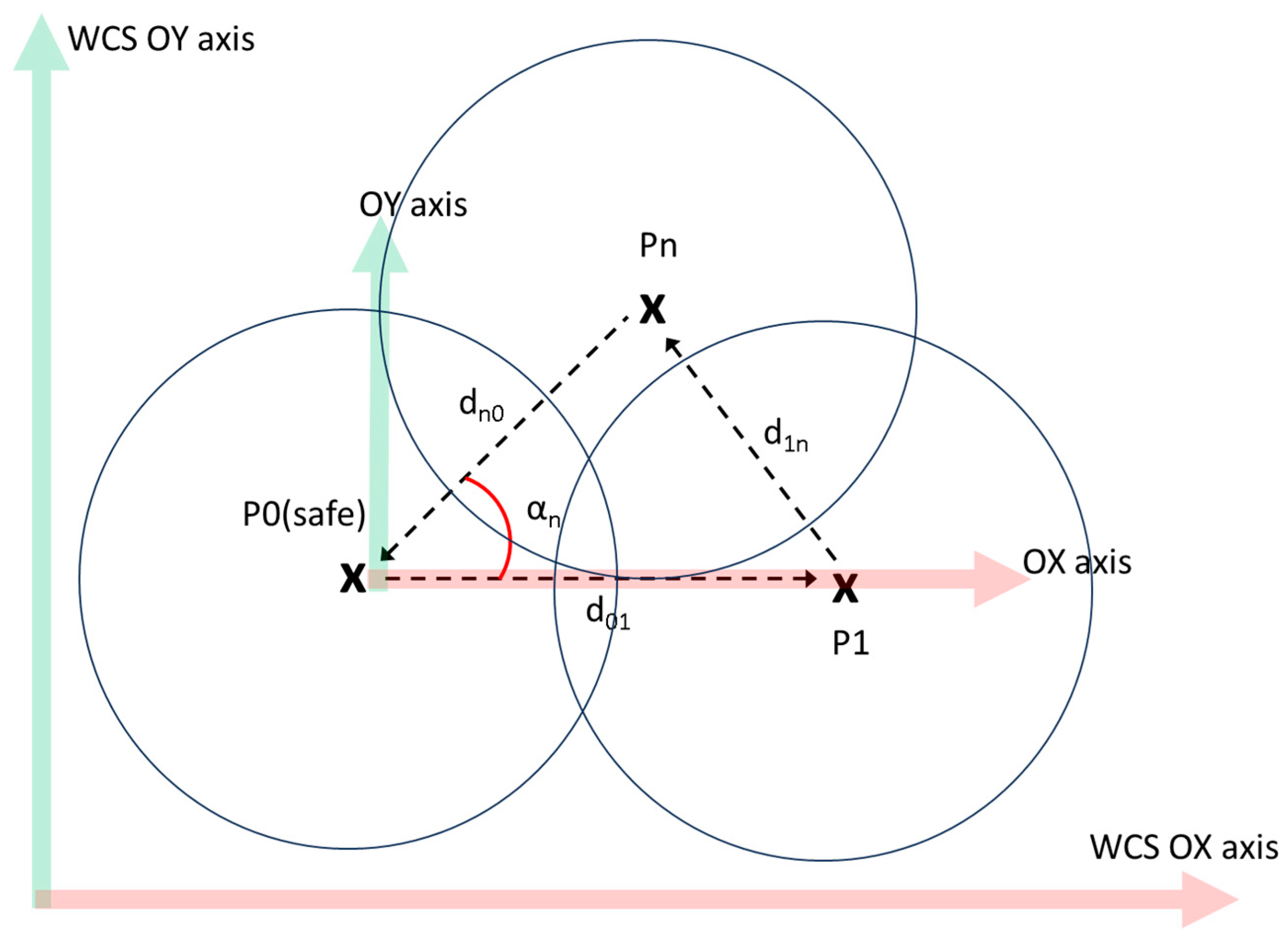
- The reverse robot working envelope (RRWE) is defined for each point of interest (a circle in the case of the two-link mechanism with the radius being the sum of the two link lengths: a1 + a2).
- The intersection of all RRWE is the search space of the optimization problem.
- The lower and left bounds are the locations of the WCS axes.
- (a)
- Input data for the optimization engine (known values): positions (P0…2), robot dimensions (a1, a2), and robot configuration (θ2 positive, + sign in Equation (2) and − sign in Equation (3)) meaning a righty configuration).
- (b)
- Decisional variables: position of the robot base (, ).
- (c)
- Decision expressions computed using Equations (2) and (3): values of the joints for each point of the pick-and-place procedure .
- (d)
- The optimization function which should be minimized: total energy, as defined in Equation (1).
- (e)
- Constraints: the position of the robot base is an integer in the intervals [500 mm, 1300 mm] for the X axis and [200 mm, 1300 mm] for the Y axis (see Figure 11).
6. Conclusions and Future Research Direction
- (a)
- Increasing the complexity of the model by considering all degrees of freedom, increasing the decision variables from placement in the XY plane to placement in the operational space (XYZ and rotation, usually over Z), increasing the number of fly-by points as this is the case for real scenarios, considering linear motion paths in the operational space, and accounting for possible collisions of the robot segments with workplace equipment.
- (b)
- Analysing how the alternation between mechanical brakes and servo brakes influences the EC in the situations when the equipment is not used, e.g., the robot is waiting for a pallet to arrive in the workstation.
- (c)
- Adjusting the speed according to the workload of the workstation: if the work queue is full, the robot operates at a lower speed, reducing EC.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- IEA (International Energy Agency). World Energy Outlook 2022. 2022. Available online: https://www.iea.org/reports/world-energy-outlook-2022 (accessed on 12 October 2023).
- Müller, C. World Robotics 2022—Industrial Robots, IFR Statistical Department, VDMA Services GmbH, Frankfurt am Main, Germany. 2022. Available online: https://ifr.org/img/worldrobotics/Executive_Summary_WR_Industrial_Robots_2022.pdf (accessed on 17 December 2023).
- Fujimori, S.; Matsuoka, Y. Development of method for estimation of world industrial energy consumption and its application. Energy Econ. 2011, 33, 461–473. [Google Scholar] [CrossRef]
- Binderbauer, P.J.; Woegerbauer, M.; Nagovnak, P.; Kienberger, T. The effect of “energy of scale” on the energy consumption in different industrial sectors. Sustain. Prod. Consum. 2023, 41, 75–87. [Google Scholar] [CrossRef]
- Olanrewaju, O.; Jimoh, A.; Kholopane, P. Integrated IDA–ANN–DEA for assessment and optimization of energy consumption in industrial sectors. Energy 2012, 46, 629–635. [Google Scholar] [CrossRef]
- Pellicciari, M.; Berselli, G.; Leali, F.; Vergnano, A. A method for reducing the energy consumption of pick-and-place industrial robots. Mechatronics 2013, 23, 326–334. [Google Scholar] [CrossRef]
- Othman, A.; Belda, K.; Burget, P. Physical modelling of energy consumption of industrial articulated robots. In Proceedings of the 2015 15th International Conference on Control, Automation and Systems (ICCAS), Busan, Republic of Korea, 13–16 October 2015; pp. 784–789. [Google Scholar]
- Zhao, G.; Liu, Z.; He, Y.; Cao, H.; Guo, Y. Energy consumption in machining: Classification, prediction, and reduction strategy. Energy 2017, 133, 142–157. [Google Scholar] [CrossRef]
- McKerracher, C.; Torriti, J. Energy consumption feedback in perspective: Integrating Australian data to meta-analyses on in-home displays. Energy Effic. 2013, 6, 387–405. [Google Scholar] [CrossRef]
- Babiuch, M.; Foltynek, P.; Smutny, P. Using the ESP32 Microcontroller for Data Processing. In Proceedings of the 2019 20th International Carpathian Control Conference (ICCC), Krakow, Poland, 26–29 May 2019; pp. 1–6. [Google Scholar]
- Zhang, M.; Yan, J. A data-driven method for optimizing the energy consumption of industrial robots. J. Clean. Prod. 2020, 285, 124862. [Google Scholar] [CrossRef]
- Soori, M.; Arezoo, B.; Dastres, R. Optimization of energy consumption in industrial robots, a review. Cogn. Robot. 2023, 3, 142–157. [Google Scholar] [CrossRef]
- Kim, S.; Jin, H.; Seo, M.; Har, D. Optimal Path Planning of Automated Guided Vehicle using Dijkstra Algorithm under Dynamic Conditions. In Proceedings of the 2019 7th International Conference on Robot Intelligence Technology and Applications (RiTA), Daejeon, Republic of Korea, 1–3 November 2019; pp. 231–236. [Google Scholar]
- Paes, K.; Dewulf, W.; Elst, K.V.; Kellens, K.; Slaets, P. Energy Efficient Trajectories for an Industrial ABB Robot. Procedia CIRP 2014, 15, 105–110. [Google Scholar] [CrossRef]
- Aggogeri, F.; Borboni, A.; Pellegrini, N. Jerk Trajectory Planning for Assistive and Rehabilitative Mechatronic Devices. Int. Rev. Mech. Eng. (IREME) 2016, 10, 543. [Google Scholar] [CrossRef]
- Omron. eV+Language Reference Guide, v2.x, 18319–000 Rev A, Omron Adept Technologies. 2016, pp. 138–141. Available online: https://assets.omron.eu/downloads/manual/en/v3/i605_ev%2B_language_reference_manual_en.pdf (accessed on 17 December 2023).
- Yamamoto, T.; Hayama, H.; Hayashi, T.; Mori, T. Automatic Energy-Saving Operations System Using Robotic Process Automation. Energies 2020, 13, 2342. [Google Scholar] [CrossRef]
- Mura, M.D.; Dini, G. Designing assembly lines with humans and collaborative robots: A genetic approach. CIRP Ann. 2019, 68, 1–4. [Google Scholar] [CrossRef]
- Vodovozov, V.; Raud, Z.; Petlenkov, E. Review on Braking Energy Management in Electric Vehicles. Energies 2021, 14, 4477. [Google Scholar] [CrossRef]
- Meike, D.; Ribickis, L. Recuperated energy savings potential and approaches in industrial robotics. In Proceedings of the 2011 IEEE International Conference on Automation Science and Engineering (CASE 2011), Trieste, Italy, 24–27 August 2011; pp. 299–303. [Google Scholar]
- Palomba, I.; Wehrle, E.; Carabin, G.; Vidoni, R. Minimization of the Energy Consumption in Industrial Robots through Regenerative Drives and Optimally Designed Compliant Elements. Appl. Sci. 2020, 10, 7475. [Google Scholar] [CrossRef]
- Wu, F.; Howard, M. Energy Regenerative Damping in Variable Impedance Actuators for Long-Term Robotic Deployment. IEEE Trans. Robot. 2020, 36, 1778–1790. [Google Scholar] [CrossRef]
- Yaskawa Europe. Yaskawa Robots with Regenerative Braking. Energy-Efficient Robots. 2022. Available online: https://www.yaskawa.eu.com/header-meta/news-events/article/yaskawa-robots-with-regenerative-braking_n18865 (accessed on 17 December 2023).
- Yin, S.; Ji, W.; Wang, L. A machine learning based energy efficient trajectory planning approach for industrial robots. Procedia CIRP 2019, 81, 429–434. [Google Scholar] [CrossRef]
- Nonoyama, K.; Liu, Z.; Fujiwara, T.; Alam, M.; Nishi, T. Energy-Efficient Robot Configuration and Motion Planning Using Genetic Algorithm and Particle Swarm Optimization. Energies 2022, 15, 2074. [Google Scholar] [CrossRef]
- Gorkavyy, M.A.; Gorkavyy, A.I.; Egorova, V.P.; Melnichenko, M.A. Automated method based on a neural network model for searching energy-efficient complex movement trajectories of industrial robot in a differentiated technological process. Front. Energy Res. 2023, 11, 1129311. [Google Scholar] [CrossRef]
- Schmidt, C.; Li, W.; Thiede, S.; Kara, S.; Herrmann, C. A methodology for customized prediction of energy consumption in manufacturing industries. Int. J. Precis. Eng. Manuf. Technol. 2015, 2, 163–172. [Google Scholar] [CrossRef]
- Lin, H.-I.; Mandal, R.; Wibowo, F.S. BN-LSTM-based energy consumption modeling approach for an industrial robot manipulator. Robot. Comput. Manuf. 2024, 85, 102629. [Google Scholar] [CrossRef]
- Morariu, C.; Morariu, O.; Răileanu, S.; Borangiu, T. Machine learning for predictive scheduling and resource allocation in large scale manufacturing systems. Comput. Ind. 2020, 120, 103244. [Google Scholar] [CrossRef]
- Rubio, F.; Llopis-Albert, C.; Valero, F. Multi-objective optimization of costs and energy efficiency associated with autonomous industrial processes for sustainable growth. Technol. Forecast. Soc. Chang. 2021, 173, 121115. [Google Scholar] [CrossRef]
- Guerra-Santin, O.; Itard, L. The effect of energy performance regulations on energy consumption. Energy Effic. 2012, 5, 269–282. [Google Scholar] [CrossRef]
- da Cunha, C.; Cardin, O.; Gallot, G.; Viaud, J. Designing the Digital Twins of Reconfigurable Manufacturing Systems: Application on a smart factory. IFAC-PapersOnLine 2021, 54, 874–879. [Google Scholar] [CrossRef]
- Velchev, S.; Kolev, I.; Ivanov, K.; Gechevski, S. Empirical models for specific energy consumption and optimization of cutting parameters for minimizing energy consumption during turning. J. Clean. Prod. 2014, 80, 139–149. [Google Scholar] [CrossRef]
- Luan, F.; Yang, X.; Chen, Y.; Regis, P.J. Industrial robots and air environment: A moderated mediation model of population density and energy consumption. Sustain. Prod. Consum. 2022, 30, 870–888. [Google Scholar] [CrossRef]
- Răileanu, S.; Borangiu, T.; Anton, F. Establishing Optimal Energy Working Parameters for a Robotized Manufacturing Cell. In Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2016; Volume 371. [Google Scholar] [CrossRef]
- Qiu, B.; Chen, S.; Xiao, T.; Gu, Y.; Zhang, C.; Yang, G. A Feasible Method for Evaluating Energy Consumption of Industrial Robots. In Proceedings of the 2021 IEEE 16th Conference on Industrial Electronics and Applications (ICIEA), Chengdu, China, 1–4 August 2021; pp. 1073–1078. [Google Scholar]
- Liu, A.; Liu, H.; Yao, B.; Xu, W.; Yang, M. Energy consumption modeling of industrial robot based on simulated power data and parameter identification. Adv. Mech. Eng. 2018, 10, 1687814018773852. [Google Scholar] [CrossRef]
- Barai, G.R.; Krishnan, S.; Venkatesh, B. Smart metering and functionalities of smart meters in smart grid—A review. In Proceedings of the 2015 IEEE Electrical Power and Energy Conference (EPEC), London, ON, Canada, 26–28 October 2015; pp. 138–145. [Google Scholar]
- Narayan, S.; Doytch, N. An investigation of renewable and non-renewable energy consumption and economic growth nexus using industrial and residential energy consumption. Energy Econ. 2017, 68, 160–176. [Google Scholar] [CrossRef]
- Tauber, M.; Skopik, F.; Bleier, T.; Hutchison, D. A Self-Organising Approach for Smart Meter Communication Systems. In Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2013; Volume 8221. [Google Scholar] [CrossRef]
- Siciliano, B.; Sciavicco, L.; Villani, L.; Oriolo, G. Robotics: Modelling, Planning and Control; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010; ISBN 1846286417. [Google Scholar]
- Yang, B.; Yang, W. Modular approach to kinematic reliability analysis of industrial robots. Reliab. Eng. Syst. Saf. 2022, 229, 108841. [Google Scholar] [CrossRef]
- Gao, G.; Sun, G.; Na, J.; Guo, Y.; Wu, X. Structural parameter identification for 6 DOF industrial robots. Mech. Syst. Signal Process. 2017, 113, 145–155. [Google Scholar] [CrossRef]
- Abdelkhalik, O.; Darani, S. Optimization of nonlinear wave energy converters. Ocean Eng. 2018, 162, 187–195. [Google Scholar] [CrossRef]
- Dinh, Q.T.; Savorgnan, C.; Diehl, M. Adjoint-Based Predictor-Corrector Sequential Convex Programming for Parametric Nonlinear Optimization. SIAM J. Optim. 2011, 22, 1258–1284. [Google Scholar] [CrossRef]
- Alam, M.; Ibaraki, S.; Fukuda, K.; Morita, S.; Usuki, H.; Otsuki, N.; Yoshioka, H. Inclusion of Bidirectional Angular Positioning Deviations in the Kinematic Model of a Six-DOF Articulated Robot for Static Volumetric Error Compensation. IEEE/ASME Trans. Mechatron. 2022, 27, 4339–4349. [Google Scholar] [CrossRef]
- Game, R.U.; Davkhare, A.A.; Pakhale, S.S.; Ekhande, S.B.; Shinde, V.B. Kinematic analysis of various robot configurations. Int. Res. J. Eng. Technol. (IRJET) 2017, 4, 921–935. [Google Scholar]
- Alam, M.; Ibaraki, S.; Fukuda, K. Kinematic Modeling of Six-Axis Industrial Robot and its Parameter Identification: A Tutorial. Int. J. Autom. Technol. 2021, 15, 599–610. [Google Scholar] [CrossRef]
- Ma, L.; Bazzoli, P.; Sammons, P.M.; Landers, R.G.; Bristow, D.A. Modeling and calibration of high-order joint-dependent kinematic errors for industrial robots. Robot. Comput. Manuf. 2017, 50, 153–167. [Google Scholar] [CrossRef]
- Zhou, J.; Nguyen, H.-N.; Kang, H.-J. Simultaneous identification of joint compliance and kinematic parameters of industrial robots. Int. J. Precis. Eng. Manuf. 2014, 15, 2257–2264. [Google Scholar] [CrossRef]
- Toquica, J.S.; Oliveira, P.S.; Souza, W.S.; Motta, J.M.S.; Borges, D.L. An analytical and a Deep Learning model for solving the inverse kinematic problem of an industrial parallel robot. Comput. Ind. Eng. 2020, 151, 106682. [Google Scholar] [CrossRef]
- Leyffer, S.; Menickelly, M.; Munson, T.; Vanaret, C.; Wild, S.M. A survey of nonlinear robust optimization. INFOR: Inf. Syst. Oper. Res. 2020, 58, 342–373. [Google Scholar] [CrossRef]
- Anton, F.; Anton, S.; Borangiu, T.; Răileanu, S. Optimizing Trajectory Points for High Speed Assembly Operations. In Advances in Robot Design and Intelligent Control: Proceedings of the 24th International Conference on Robotics in Alpe-Adria-Danube Region (RAAD), Bucharest, Romania, 27–29 May 2015; Springer: Cham, Switzerland, 2015; Volume 371. [Google Scholar] [CrossRef]
- D’Agostino, D.; Serani, A.; Campana, E.; Diez, M. Nonlinear Methods for Design-Space Dimensionality Reduction in Shape Optimization, Machine Learning, Optimization and Big Data (MOD 2017). In Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2017; p. 10710. [Google Scholar] [CrossRef]
- Abdi, M.; Ashcroft, I.; Wildman, R. Topology optimization of geometrically nonlinear structures using an evolutionary optimization method. Eng. Optim. 2018, 50, 1850–1870. [Google Scholar] [CrossRef]
- Žilinskas, A.; Žilinskas, J. Interval Arithmetic Based Optimization in Nonlinear Regression. Informatica 2010, 21, 149–158. [Google Scholar] [CrossRef]
- Blumensath, T. Compressed Sensing with Nonlinear Observations and Related Nonlinear Optimization Problems. IEEE Trans. Inf. Theory 2012, 59, 3466–3474. [Google Scholar] [CrossRef]
- Zhou, J.; Yu, Y.; Liu, Y.; Zhang, Y. Solving nonlinear optimization problems with bipolar fuzzy relational equation constraints. J. Inequalities Appl. 2016, 2016, 126. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Characteristics |
|---|---|
| controller, 8 × 10-bit ADC) | Needs an external Wi-Fi interface. Reduced computing resources which are insufficient for network communication, data processing, and further software extensions/improvements. |
| ESP8266 (1 Tensilica 32-bit L106 core, 1 × 10-bit ADC) | Only one analog-to-digital converter (ADC) channel, insufficient for both voltage and current measurement. |
| ESP32 (Tensilica Xtensa LX6 microprocessor) | Dual-core processor, integrated Wi-Fi/Bluetooth. Absence of external analogue voltage reference connection can reduce ADC accuracy and increase noise. ADC and radio (Wi-Fi) on same chip package increase ADC noise. A valid option only if using an external ADC chip for signal acquisition. |
| STM32F4/F7/H7 (1 ARM Cortex-M 32-bit, 3 × 12-bit ADC) | No platform options featuring an integrated wireless interface. Single core processor limits future development. |
| Raspberry Pi Pico W (2 ARM Cortex-M 32-bit cores, 3 × 12-bit ADC, network interface) | Includes a tightly integrated, on-board network interface. Multiple high-resolution analogue inputs. ADC reference available for external filtering. Wi-Fi chip is on a different package, reducing additional ADC noise. Two processor cores provide sufficient computing power for both signal processing and network stack; also allows for future software improvements. |
| # | Speed Limit (%) | Energy J1 (Wsec) | Time J1 (s) | Energy J2 (Wsec) | Time J2 (s) | Energy J3 (Wsec) | Time J3 (s) | Energy J1 (Wsec) | Time J1 (s) |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 10 | 47.5 | 3 | 22 | 1.65 | 6.3 | 0.6 | 5.41 | 0.6 |
| 2 | 20 | 47.63 | 1.6 | 20.68 | 0.9 | 3.46 | 0.4 | 7.49 | 0.8 |
| 3 | 30 | 53.34 | 1.1 | 20.03 | 0.6 | 5.59 | 0.4 | 3.87 | 0.4 |
| 4 | 40 | 55.07 | 0.8 | 25.52 | 0.6 | 3.81 | 0.3 | 2.07 | 0.25 |
| 5 | 50 | 67.42 | 0.65 | 21.61 | 0.4 | 4.19 | 0.25 | 1.77 | 0.2 |
| 6 | 60 | 71.39 | 0.55 | 23.78 | 0.4 | 3.89 | 0.2 | 1.78 | 0.2 |
| 7 | 70 | 68.13 | 0.5 | 28.96 | 0.4 | 4.15 | 0.2 | 1.28 | 0.15 |
| 8 | 80 | 73.25 | 0.4 | 30.83 | 0.4 | 4.5 | 0.15 | 1.61 | 0.15 |
| #Point | Description | Distance Value (mm) |
|---|---|---|
| 1 | d01: Safe→P1 | d01 |
| 2 | d02: Safe→P2 | d02 |
| … | ||
| n | d0n: Safe→Pn | d0n |
| N + 1 | d12: P1→P2 | d12 |
| … | ||
| n + n – 1 | d1n: P1→Pn | d1n |
| #Point | Description | Distance Value (mm) |
|---|---|---|
| 1 | d01: Safe→P1 | 262 |
| 2 | d02: Safe→P2 | 217 |
| 3 | d12: P1→P2 | 467 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Răileanu, S.; Borangiu, T.; Lențoiu, I.; Constantinescu, M. Optimizing Energy Consumption of Industrial Robots with Model-Based Layout Design. Sustainability 2024, 16, 1053. https://doi.org/10.3390/su16031053
Răileanu S, Borangiu T, Lențoiu I, Constantinescu M. Optimizing Energy Consumption of Industrial Robots with Model-Based Layout Design. Sustainability. 2024; 16(3):1053. https://doi.org/10.3390/su16031053
Chicago/Turabian StyleRăileanu, Silviu, Theodor Borangiu, Ionuț Lențoiu, and Mihnea Constantinescu. 2024. "Optimizing Energy Consumption of Industrial Robots with Model-Based Layout Design" Sustainability 16, no. 3: 1053. https://doi.org/10.3390/su16031053