
Research on Multi-Point Monitoring Data Grid Model and Inversion Positioning Method for Gas Leakage in Oil and Gas Stations

Abstract
1. Introduction
2. Leakage Analysis of Oil and Gas Stations
2.1. Leakage Analysis of Process Equipment in Oil and Gas Stations
- (i)
- Valves are the key equipment used to control fluid in oil and gas installation. It is worth noting that major leakage accidents in oil and gas stations occur from time to time due to a poor valve seal or improper operation.
- (ii)
- At the flange connection between each oil and gas device (separator, heat exchanger and container, etc.) and the transmission pipeline, leakage between the gasket and the flange sealing surface can occur due to a lax fitting between the gasket and the flange sealing surface and insufficient pressing stress.
- (iii)
- The connector, an essential component of the natural gas pipeline system, is often susceptible to leakage accidents. The aging or dislodging of the rubber pad can result in the connection port not being tightly closed, leading to leakage. Additionally, if the bolt is not tightened or the gasket is not fully embedded, a gap may form in the connection port, leading to leakage.
- (iv)
- With a change in the transportation pressure in the oil and gas station or the fracture of the rubber sealing ring, a sealing failure in the casing easily occurs.
2.2. Gas Leakage Diffusion Model
3. Gas Leakage Multi-Point Monitoring Data Grid Model
3.1. Optimized Layout of Monitoring Points
3.1.1. Equipment Leakage Risk Assessment
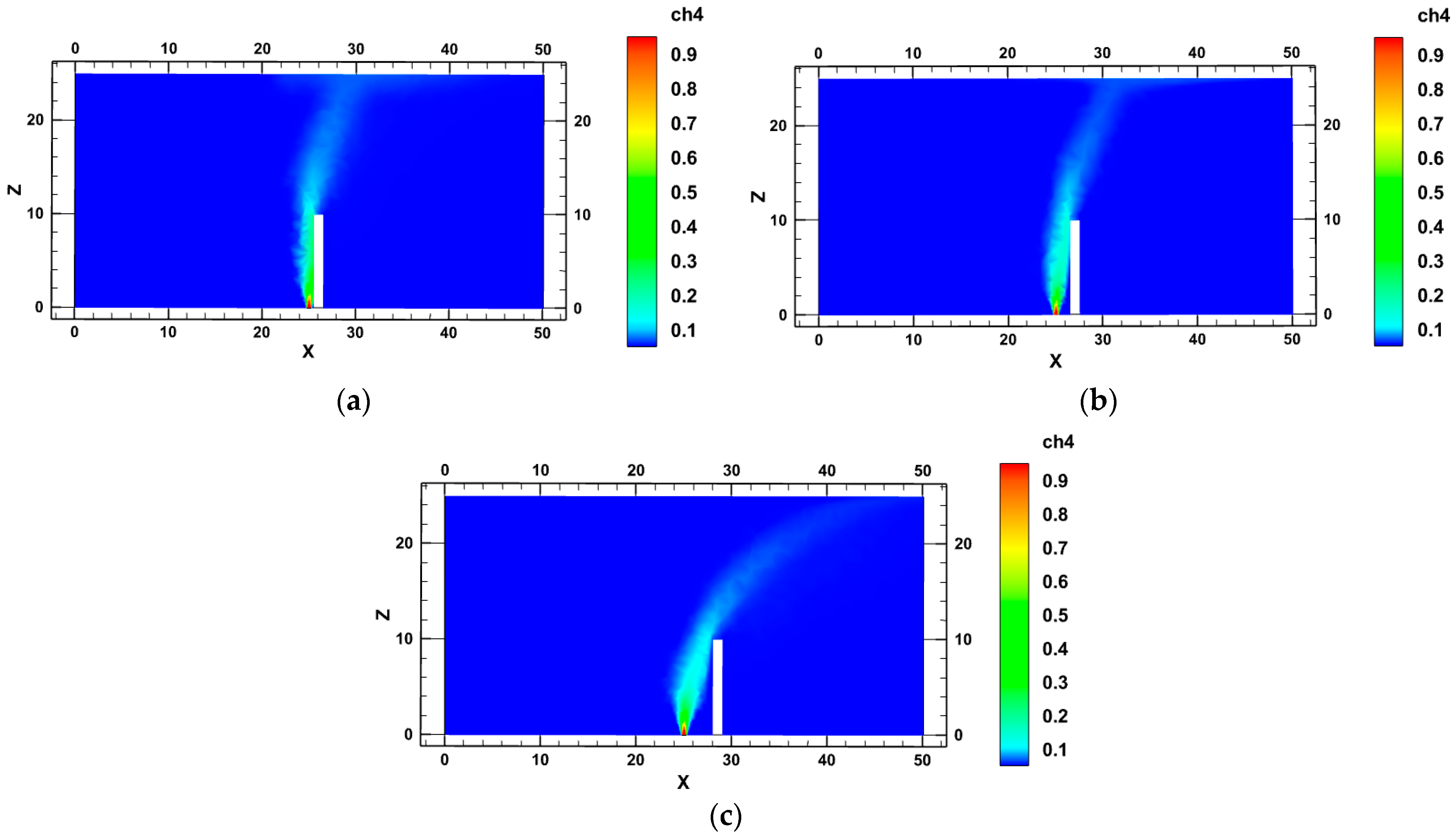
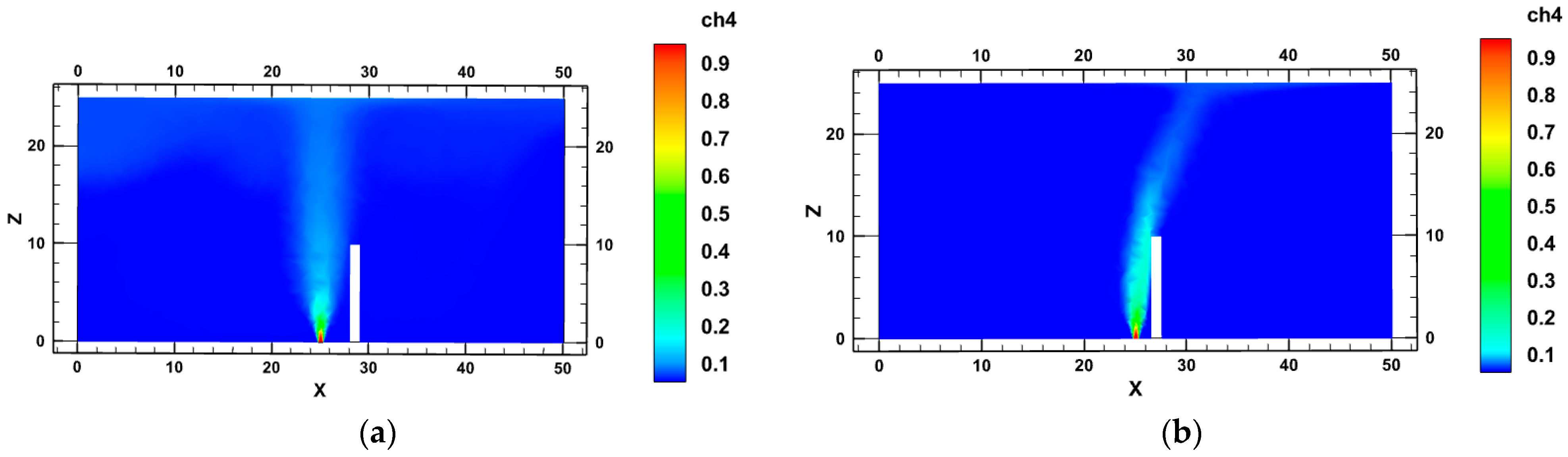
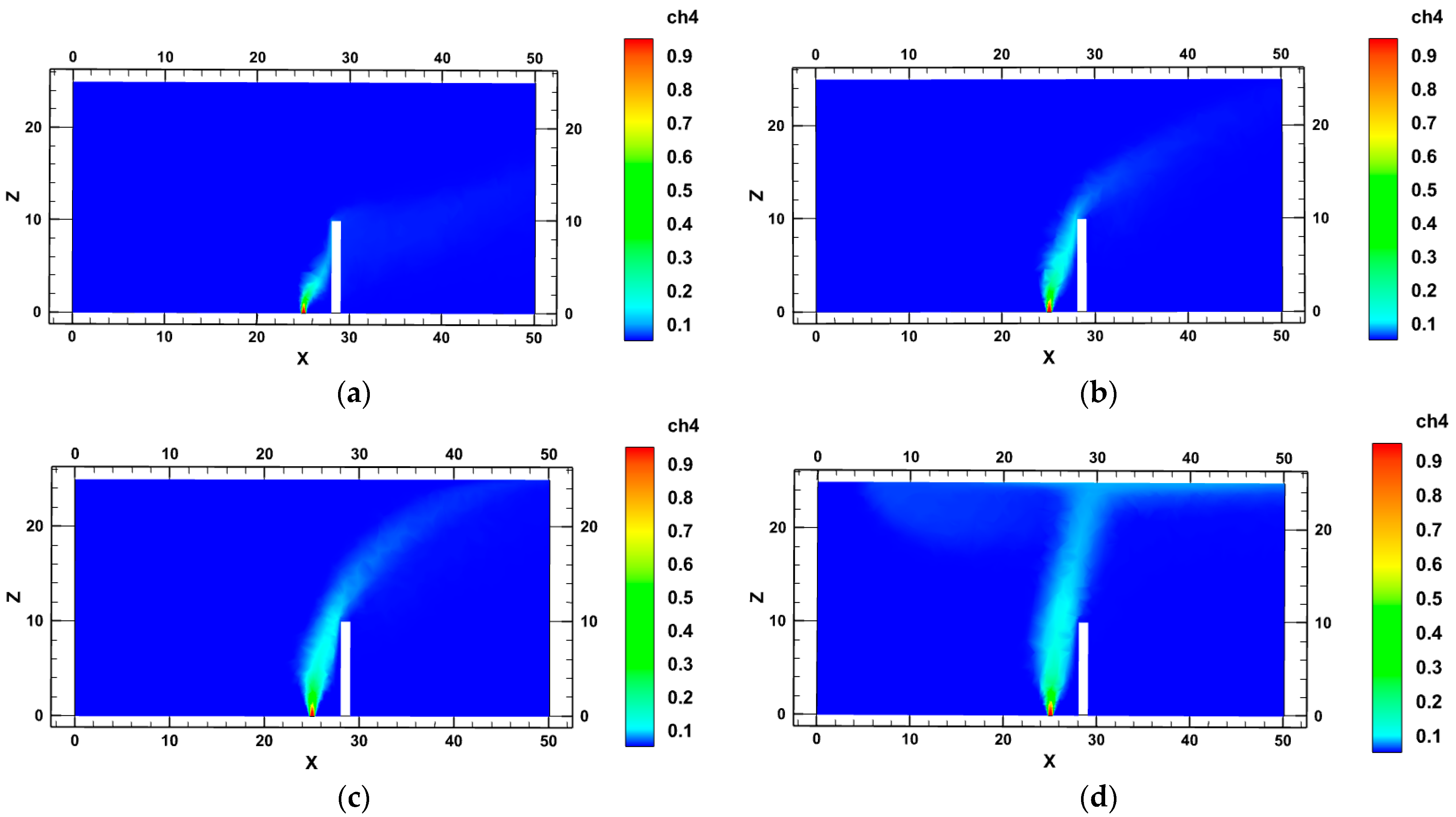
3.1.2. Analysis of Gas Leakage and Diffusion Law
- (1)
- Distance of obstacle
- (2)
- Height of obstacle
- (3)
- External wind speed
- (4)
- Gas leakage velocity
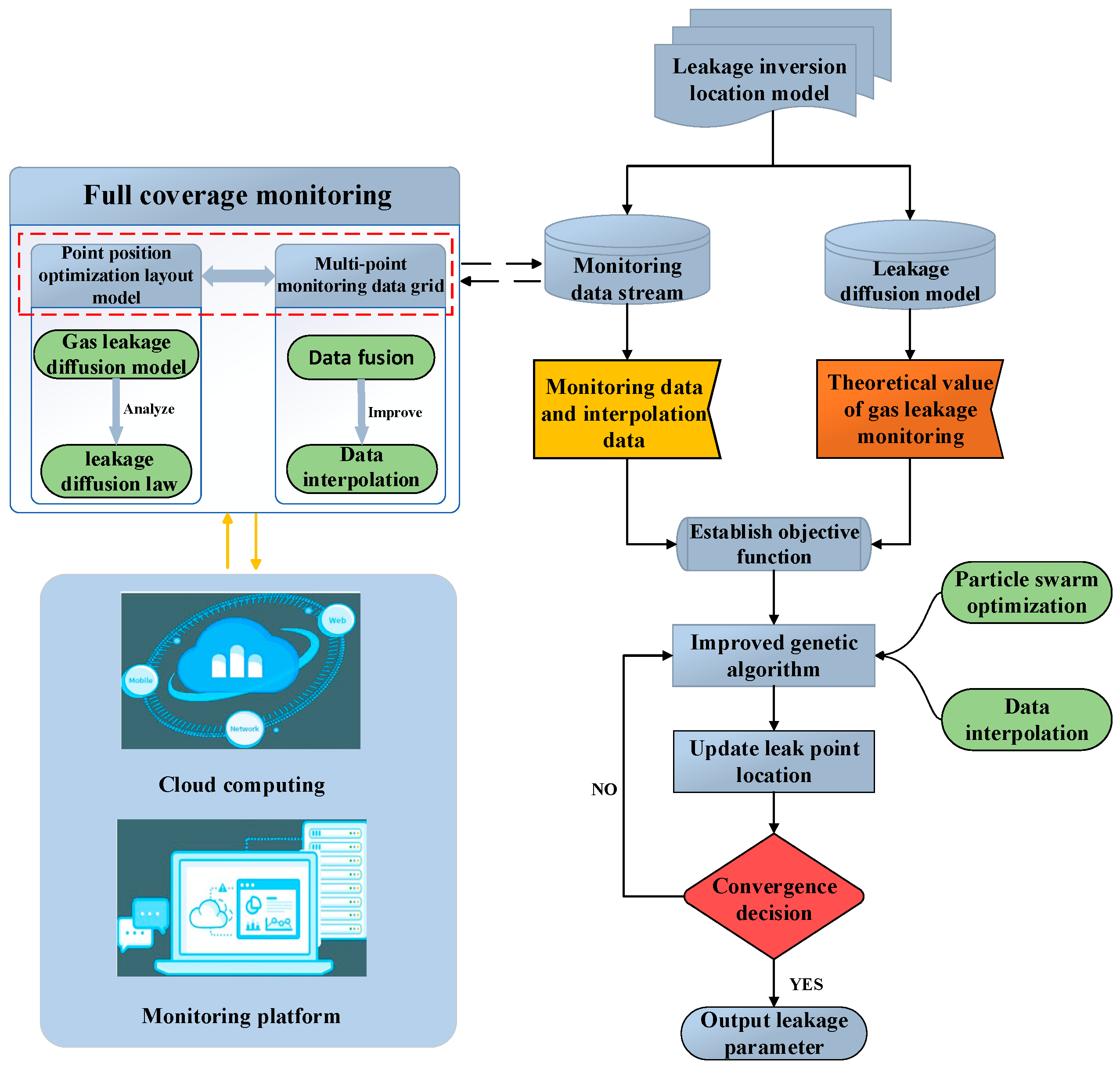
3.2. Full Coverage Monitoring Method of Oil and Gas Station
- (1)
- In order to determine the positioning space coordinates of the point laser methane detector, the southwest corner of the oil and gas station is taken as the origin of the space rectangular coordinate system. The X-axis is the east–west direction of the oil and gas station, and the Y-axis is the north–south direction of the oil and gas station. The coordinate information and concentration information of each monitoring point are expressed as follows: , i = 1...... n; n indicates the number of monitoring points.
- (2)
- Preferred data interpolation method
- (3)
- Considering the monitoring environment of oil and gas stations and the influencing factors of gas leakage and diffusion, the above commonly used spatial data interpolation method is analyzed. In order to obtain the data interpolation points with high precision and good quality, ordinary Kriging interpolation and inverse distance-weighted interpolation are selected. Considering the characteristics of the above two interpolation methods, the Kriging interpolation method and inverse distance weighted interpolation method are combined, and the advantages of the two methods are fully utilized to obtain new data interpolation results. Among them, the Kriging interpolation result is , the inverse distance-weighted interpolation method is , and the final fusion interpolation result is as follows:where is the comprehensive interpolation calculated by Kriging interpolation and inverse distance-weighted interpolation; j = 1…… m, m is the number of interpolation points.
4. Inversion Positioning Method for Gas Leakage in Oil and Gas Station
4.1. Gas Leakage Inversion Positioning Model
4.2. Inverse Positioning Method Based on Improved Genetic Algorithm
- (1)
- Data interpolation expands the database.
- (2)
- Optimize algorithm parameters to avoid local optimality.
- (3)
- Particle swarm optimization algorithm updates the local optimal solution.
5. Analysis and Discussion
5.1. Case Study and Analysis
5.1.1. Leakage Monitoring Scheme Design
- (1)
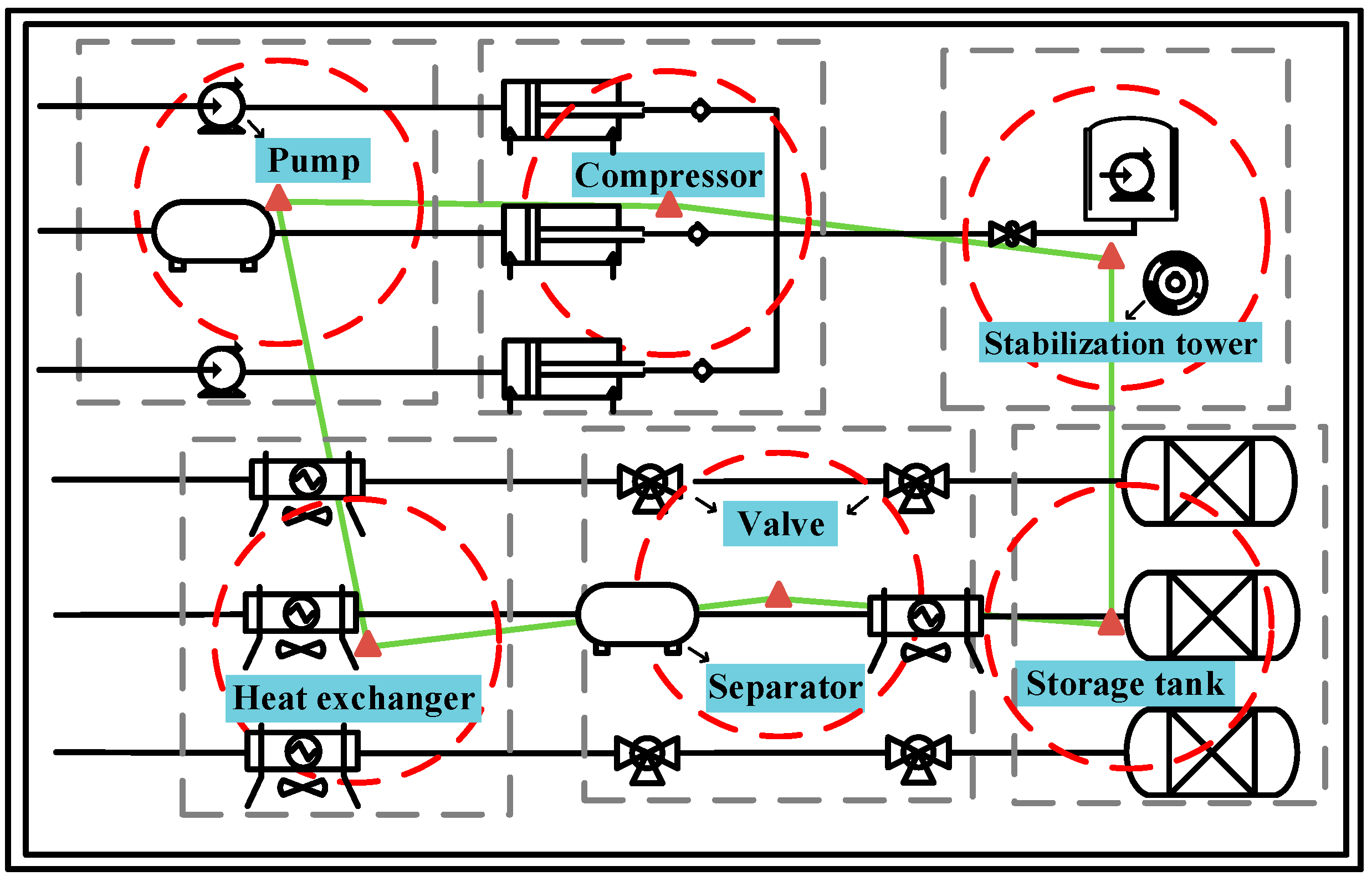
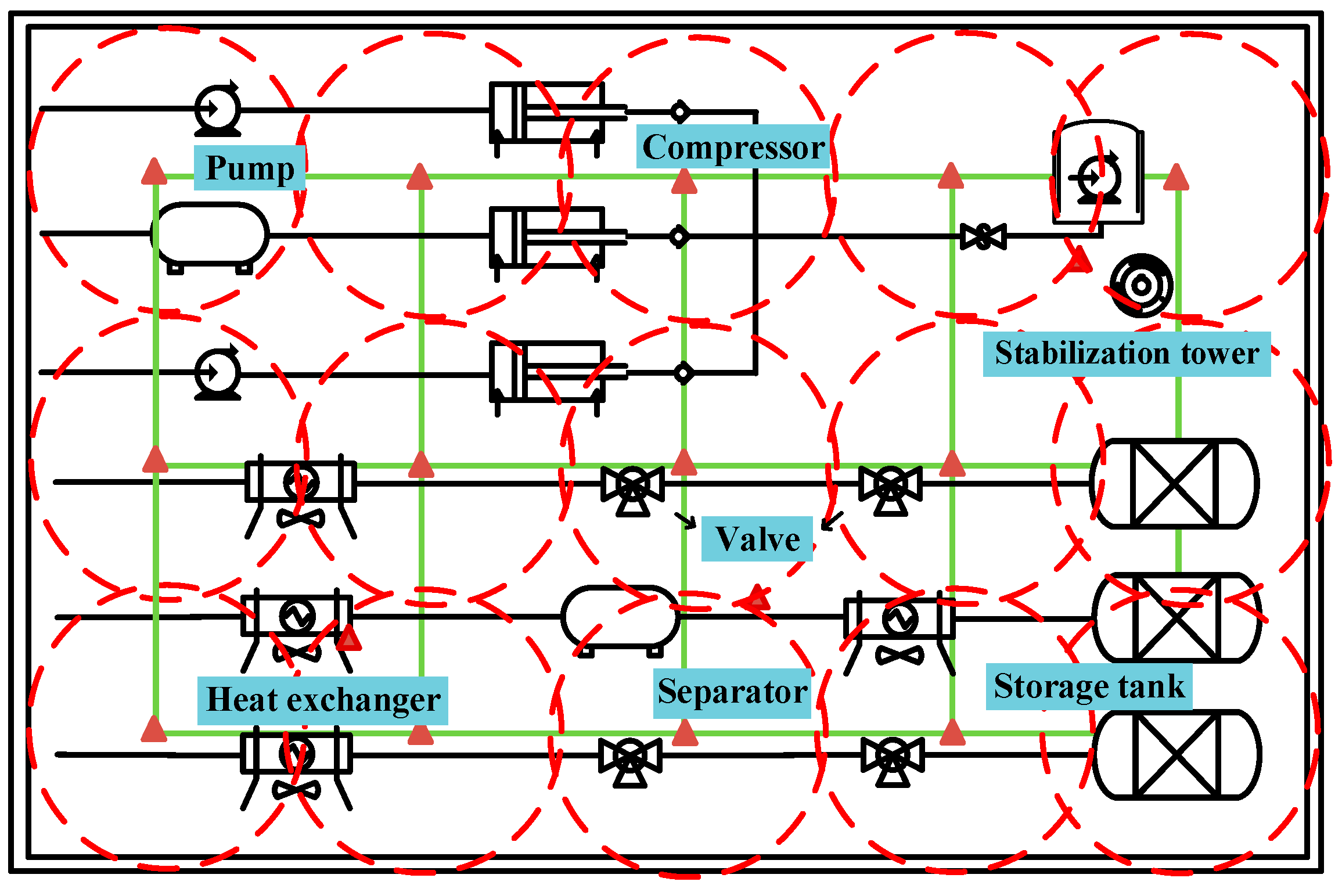
- The effective monitoring area of the point-type laser methane sensor is 20~25 m2. Therefore, when the point laser methane detector is deployed, it is necessary to cover the major dangerous leakage sources of the oil and gas station.
- (2)
- In order to ensure the accuracy of the monitoring data, the point laser methane detector is installed at the point at which the probability of leakage is greatest in each functional area of the oil and gas station. For example, the pump body area is installed in the reciprocating pump body with the greater probability of leakage; the pipeline area should be arranged at the conveying pipe with a larger inner diameter.
- (3)
- The installation spacing of each point laser methane detector is set to 10~15 m, and the distance between each monitoring node is as equal as possible, so that the time difference of data transmission can be controlled within a certain range.
- (4)
- Each point laser methane detector should stagger the ground pipeline to facilitate equipment layout and pipeline maintenance. The effective monitoring area of the point laser methane detector should not be overlapped to make full use of the effective monitoring area.
- (5)
- The point laser methane detector should be arranged on the wind side of the minimum-frequency wind direction of the major dangerous leak source, and the monitoring point should not be more than 2 m away from the natural gas leak source.
- (6)
- Monitoring points should not be installed in staggered pipeline ranges. If obstacles such as large devices and pipelines are encountered, these should be installed on the windward side of the obstacles and a certain distance should be kept from the obstacles to avoid monitoring failure caused by obstacles.
- (7)
- The monitoring point represents the monitoring space coordinate value, considering that the erection height affects the monitoring accuracy. Without the influence of surrounding obstacles, the erection height shall exceed the process equipment. Under the influence of surrounding obstacles, the erection height should be preferably lower than the erection height. An example of the leakage monitoring arrangement of the oil and gas station is shown in Figure 8.
5.1.2. Analysis of Inverse Positioning Results
- (1)
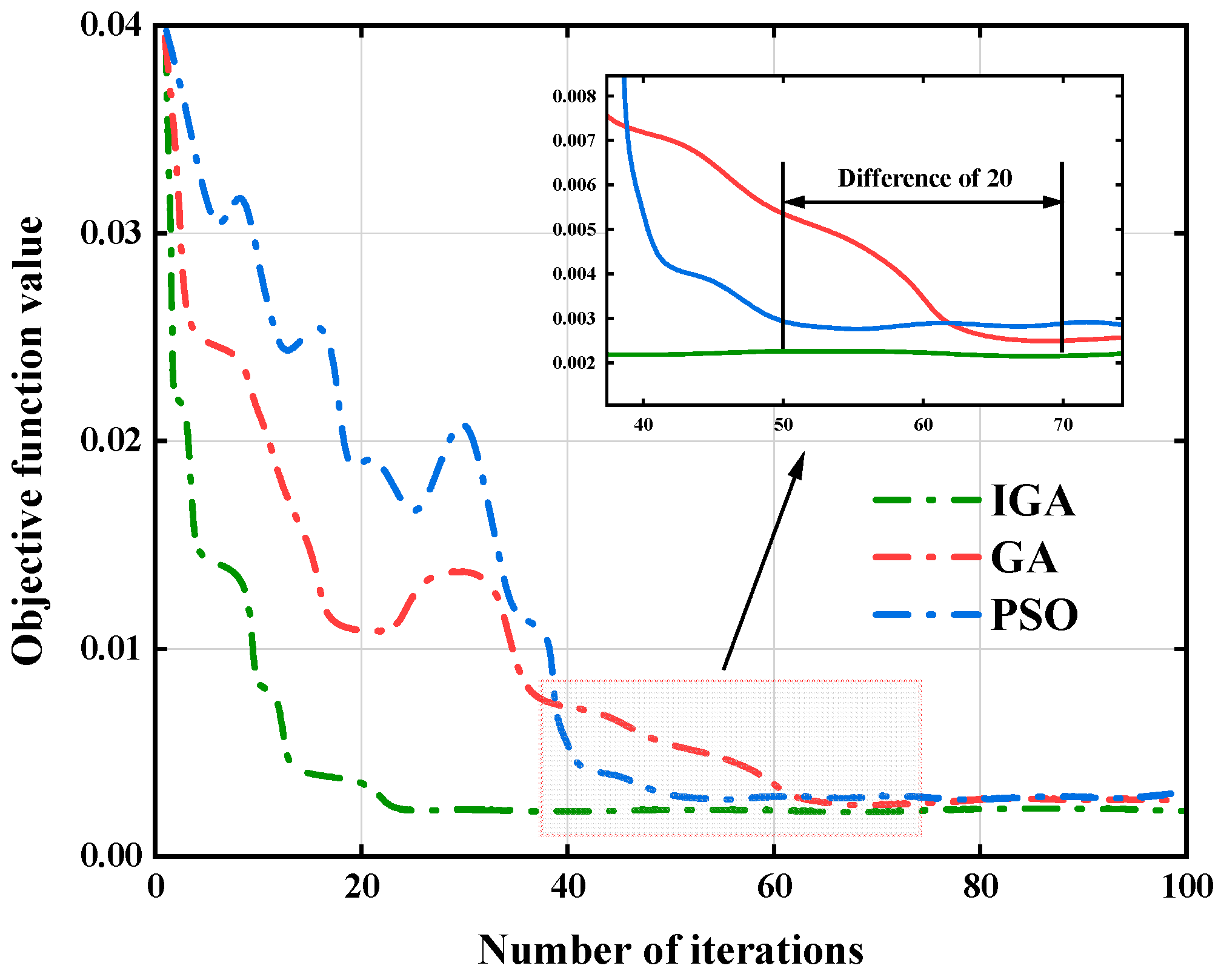
- Algorithm performance comparison
- (2)
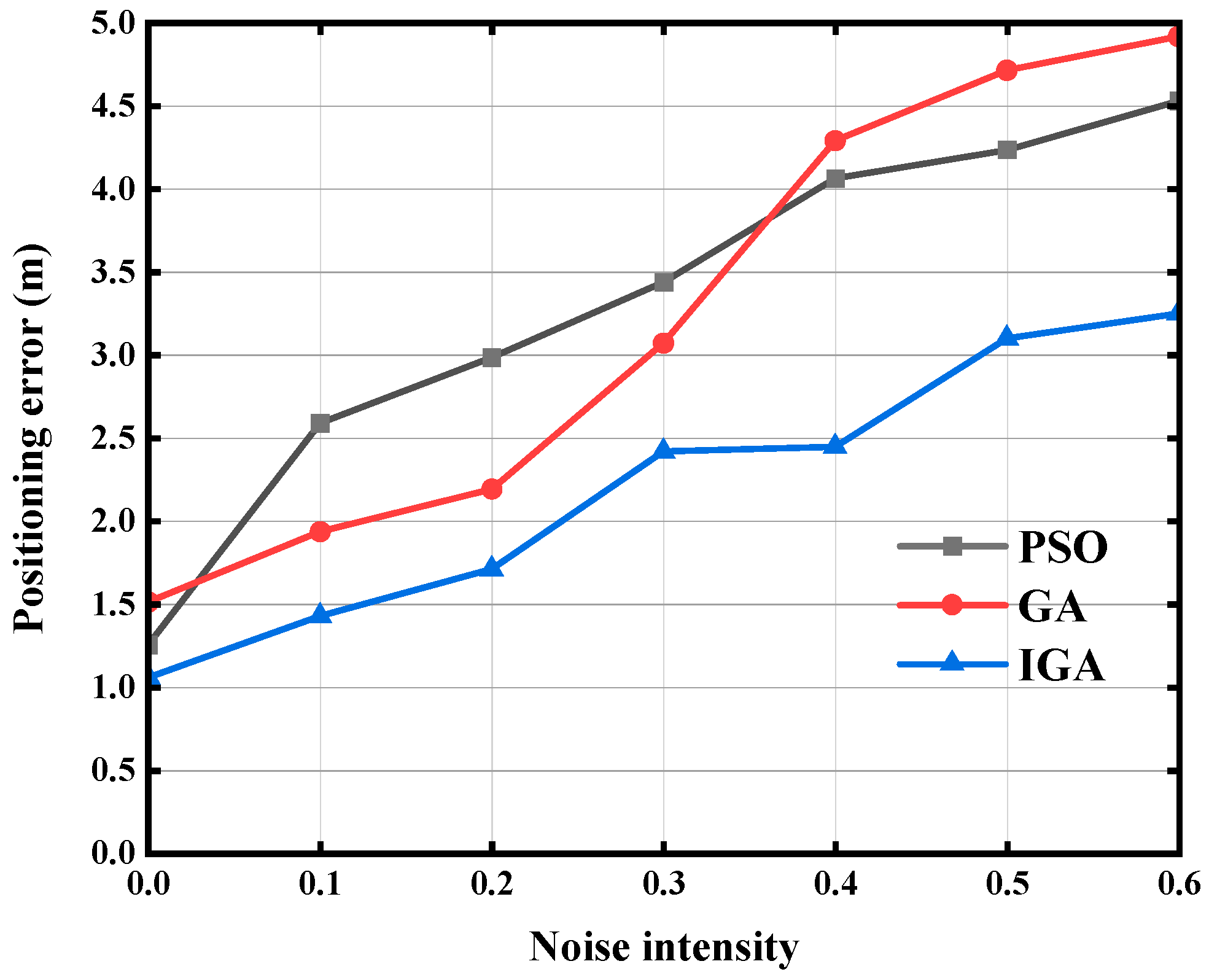
- The robustness verification
5.2. Discussion
- (1)
- The advantages of optimal layout of monitoring points
- (2)
- Advantages of data interpolation method
6. Summary and Conclusions
- (1)
- Previous studies that are only based on the risk probability of the monitoring point layout are not enough. Through CFD numerical simulation, obstacles increase the difficulty of gas leakage monitoring. Although the point laser methane monitor has the advantages of high precision and a short response time, the influence of obstacles should be avoided in the process of optimizing the layout of monitoring points.
- (2)
- Optimized data interpolation based on data fusion plays a significant role in leakage monitoring and the inversion positioning of oil and gas stations. The optimized data interpolation generation is more efficient, and the coefficient reaches 0.867. This not only improves the monitoring efficiency of oil and gas stations, but also provides accurate and abundant sample points for the inversion positioning numerical model. It reduces the economic cost of the point layout and meets the refined cost management goal of “cost decreasing and benefit increasing”.
- (3)
- The convergence performance of the IGA is improved compared with the GA, as confirmed by the numerical simulation of different algorithms. By studying the influence of the number of sample points and outliers on the convergence effect and positioning accuracy of the algorithm, it can be found that the improved genetic algorithm has a better convergence effect, and the coefficient reaches 0.915. Through the robustness test of the IGA, considering the spatial characteristics and environmental factors of the oil and gas station, the inversion results basically meet the needs of leakage source location.
- (4)
- This study belongs to the field of petrochemical industry, and can provide a theoretical basis for the location of leakage sources in gas storage gathering stations, Liquefied Natural Gas (LNG)receiving stations and other stations. At present, in the process of experimental tests and research on oil and gas station leakage location, this paper preliminarily verifies the generalizability of the single-point leakage monitoring and inversion positioning model. We hope to continue to carry out multi-point leakage monitoring and positioning research and promote the optimization of the model.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CFD | Computational Fluid Dynamics |
| GA | Genetic Algorithm |
| PSO | Particle Swarm Optimization |
| RMSE | Root Mean Square Error |
| LEL | Lower Explosion Limited |
| IGA | Improved Genetic Algorithm |
| MAE | Mean Absolute Error |
| TPX | Two-point Crossover |
| LNG | Liquefied Natural Gas |
References
- Xiangyu, M.; Mingyun, C.; Alun, G.; Xinguo, W.; Bin, L.; Jian, Z.; Zongqiang, M. China’s hydrogen development strategy in the context of double carbon targets. Nat. Gas Ind. B 2022, 9, 521–547. [Google Scholar]
- Xurong, S.; Yixuan, Z.; Yu, L.; Wenbo, X.; Gang, Y.; Xin, L.; Bofeng, C.; Dan, T.; Jinnan, W. Air quality benefits of achieving carbon neutrality in China. Sci. Total Environ. 2021, 795, 148784. [Google Scholar]
- Raza, S.S.A.; Qianxiao, Z.; Jaffar, A.; Daniel, B.-L.; Ladislav, P. Technology, Urbanization and Natural Gas Supply Matter for Carbon Neutrality: A New Evidence of Environmental Sustainability under the Prism of COP26. Resour. Policy 2023, 82, 103465. [Google Scholar]
- Gao, Q.; Wei, B.; Zhang, Z.; Liu, Q.; Sun, H.; Wang, Z.M.; Song, G.-L. Statistical Analysis of the Spatial Transmission of Pipeline Failures in an Oil Treatment Station at Sinopec Tahe Oilfield. J. Pipeline Syst. Eng. Pract. 2022, 13, 04022023. [Google Scholar] [CrossRef]
- Ying, L.; Yueming, L.; Jingwen, W.; Xibei, Z.; Wangsheng, C. Analysis on Causative Factors and Evolution Paths of Blast Furnace Gas Leak Accident. Energies 2022, 15, 5622. [Google Scholar]
- Zheng, H.; Kong, S.; Xing, X.; Mao, Y.; Hu, T.; Ding, Y.; Li, G.; Liu, D.; Li, S.; Qi, S. Monitoring of volatile organic compounds (VOCs) from an oil and gas station in northwest China for 1 year. Atmos. Chem. Phys. 2018, 18, 4567–4595. [Google Scholar] [CrossRef]
- James, T.; Doug, M.-S.; Chris, G.; George, H.; Alexander, D.; Xiao, A.; Murray, R. Single photon Lidar gas imagers for practical and widespread continuous methane monitoring. Appl. Energy 2022, 306, 118086. [Google Scholar]
- Bayrakli, I. A single external cavity laser-based sensor for simultaneous detection and quantification of atmospheric methane and water vapor. Opt. Quantum Electron. 2018, 50, 1–9. [Google Scholar] [CrossRef]
- Forconi, E.; Kapelan, Z.; Ferrante, M.; Mahmoud, H.; Capponi, C. Risk-based sensor placement methods for burst/leak detection in water distribution systems. Water Supply 2017, 17, 1663–1672. [Google Scholar] [CrossRef]
- Jeon, K.; Yang, S.; Kang, D.; Na, J.; Lee, W.B. Development of surrogate model using CFD and deep neural networks to optimize gas detector layout. Korean J. Chem. Eng. 2019, 36, 325–332. [Google Scholar] [CrossRef]
- Dong, J.; Wang, B.; Wang, X.; Cao, C.; Chen, S.; Du, W. Optimization of sensor deployment sequences for hazardous gas leakage monitoring and source term estimation. Chin. J. Chem. Eng. 2023, 56, 169–179. [Google Scholar] [CrossRef]
- Yee, E. Theory for Reconstruction of an Unknown Number of Contaminant Sources using Probabilistic Inference. Bound. -Layer Meteorol. 2008, 127, 359–394. [Google Scholar] [CrossRef]
- Guohua, C.; Longkai, C. Enhancing Situation Awareness of Chemical Release Through Source Inversion. Procedia Eng. 2014, 84, 742–751. [Google Scholar] [CrossRef]
- Soldevila, A.; Blesa, J.; Jensen, T.N.; Sin, S.T.; Canti, R.M.F.; Puig, V. Leak Localization Method for Water-Distribution Networks Using a Data-Driven Model and Dempster-Shafer Reasoning. IEEE Trans. Control Syst. Technol. 2020, 29, 937–948. [Google Scholar] [CrossRef]
- Marcos, Q.-G.; Marlon, A.M.; Maibeth, S.R.; Silva Neto, A.J.; Orestes, L.-S. Robust leak localization in water distribution networks using computational intelligence. Neurocomputing 2021, 438, 195–208. [Google Scholar]
- Ossai, C.I.; Boswell, B.; Davies, I.J. Pipeline failures in corrosive environments—A conceptual analysis of trends and effects. Eng. Fail. Anal. 2015, 53, 36–58. [Google Scholar] [CrossRef]
- Xie, M.; Tian, Z. A review on pipeline integrity management utilizing in-line inspection data. Eng. Fail. Anal. 2018, 92, 222–239. [Google Scholar] [CrossRef]
- Yu, W.; Song, S.; Li, Y.; Min, Y.; Huang, W.; Wen, K.; Gong, J. Gas supply reliability assessment of natural gas transmission pipeline systems. Energy 2018, 162, 853–870. [Google Scholar] [CrossRef]
- Ma, D.; Zhang, Z. Contaminant dispersion prediction and source estimation with integrated Gaussian-machine learning network model for point source emission in atmosphere. J. Hazard. Mater. 2016, 311, 237–245. [Google Scholar] [CrossRef]
- Shuaiqi, Y.; Jitao, C.; Genserik, R.; Ming, Y.; Chao, C.; Jiansong, W. Safety barrier performance assessment by integrating computational fluid dynamics and evacuation modeling for toxic gas leakage scenarios. Reliab. Eng. Syst. Saf. 2022, 226, 108719. [Google Scholar]
- Verma, V.; Padding, J.T.; Deen, N.G.; Kuipers, J.A.M. Bubble formation at a central orifice in a gas–solid fluidized bed predicted by three-dimensional two-fluid model simulations. Chem. Eng. J. 2014, 245, 217–227. [Google Scholar] [CrossRef]
- Li, X.; Wang, Z.; Tian, G.; Liu, J.; Wang, P. Numerical Simulation of Combustible Gas Diffusion with Obstacle in Space. Procedia Eng. 2017, 205, 3670–3677. [Google Scholar] [CrossRef]
- Yingchun, X.; Jie, L.; Zuopeng, H.; Zhen, X.; Jin, Q.; Jinchi, Z. Numerical simulation and experimental study of gas diffusion in a ship engine room. Ocean Eng. 2023, 271, 113638. [Google Scholar]
- Zhiheng, X.; Zhao-Dong, X.; Hongfang, L.; Haoyan, P.; Zicong, X.; Yankun, J.; Hui, S. Leakage analysis and prediction model of underground high-pressure natural gas pipeline considering box culvert protection. Process Saf. Environ. Prot. 2023, 180, 837–855. [Google Scholar]
- Raoof, G.; Arshad, R.; Stefan, I. Leakage risk assessment of a CO2 storage site: A review. Earth-Sci. Rev. 2021, 223, 103849. [Google Scholar]
- Ghasemi, P.R.; Karimi, D.M.; Javad, M.; Esmaeil, Z.; Mohammad, Y. An advanced framework for leakage risk assessment of hydrogen refueling stations using interval-valued spherical fuzzy sets (IV-SFS). Int. J. Hydrogen Energy 2023, 48, 20827–20842. [Google Scholar]
- Xueyan, W.; Xiong, Z.; Wei, G. Flammable gas leakage risk assessment for methanol to hydrogen refueling stations and liquid hydrogen refueling stations. Int. J. Hydrogen Energy 2024, 54, 1286–1294. [Google Scholar]
- Kang, C.; Bin, S.; Wenling, J.; Wuge, Y.; Tianjie, L.; Hanyue, Z.; Juan, D. Quantitative risk assessment of gas leakage and explosion accidents and its security measures in open kitchens. Eng. Fail. Anal. 2021, 130, 105763. [Google Scholar]
- Spouge, J. New generic leak frequencies for process equipment. Process Saf. Prog. 2005, 24, 249–257. [Google Scholar] [CrossRef]
- Hao, L.; Xuewen, C.; Huimin, D.; Lin, T.; Yanbo, S.; Jiang, B. Numerical simulation of leakage and diffusion distribution of natural gas and hydrogen mixtures in a closed container. Int. J. hydrogen Energy 2022, 47, 35928–35939. [Google Scholar]
- Jitao, C.; Jiansong, W.; Shuaiqi, Y.; Desheng, K.; Xiaole, Z. Prediction of gas leakage and dispersion in utility tunnels based on CFD-EnKF coupling model: A 3D full-scale application. Sustain. Cities Soc. 2022, 80, 103789. [Google Scholar]
- Mariagrazia, O.; Giansergio, M.; Marilena, G.; Angelo, S.; Pietro, P.; Hongpeng, W.; Lei, D.; Vincenzo, S. Characterization of H2S QEPAS detection in methane-based gas leaks dispersed into environment. Photoacoustics 2023, 29, 100438. [Google Scholar]
- Wei, Y.; Wu, W.; Yu, H.; Lu, J.; Huang, M.; Guo, M. Forecasts for the concentration of petroleum gas leakage diffusion under different liquid level heights of a sealing ring of sizeable floating roof tank. Sci. Rep. 2022, 12, 19124. [Google Scholar] [CrossRef] [PubMed]
- Yang, L.; Zhong, B.; Xu, X.; Liang, Z. Application of a semivariogram based on a deep neural network to Ordinary Kriging interpolation of elevation data. PLoS ONE 2022, 17, e0266942. [Google Scholar] [CrossRef]
- Xin, S.; Li, K.X.; Xin, D. Application of a Data Interpolation Algorithm in Earthquake Data Interpretation. Appl. Mech. Mater. 2013, 443, 194–197. [Google Scholar]
- Luo, X.; Meng, X.; Gan, W.; Chen, Y. Traffic Data Imputation Algorithm Based on Improved Low-Rank Matrix Decomposition. J. Sens. 2019, 2019, 1–11. [Google Scholar] [CrossRef]
- Bolun, W.; Xin, J.; Guanying, H.; Cheng, S.; Dongming, Y.; Zhiming, Z. Key-Point Interpolation: A Sparse Data Interpolation Algorithm based on B-splines. J. Phys. Conf. Ser. 2021, 2068, 012010. [Google Scholar]
- Alper, K.; Navarro, T.P.R.; Daniele, L. A genetic algorithm tool for conceptual structural design with cost and embodied carbon optimization. Eng. Appl. Artif. Intell. 2022, 112, 104711. [Google Scholar]
- Wang, J.; Zhang, R.; Yan, Y.; Dong, X.; Li, J.M. Locating hazardous gas leaks in the atmosphere via modified genetic, MCMC and particle swarm optimization algorithms. Atmos. Environ. 2017, 157, 27–37. [Google Scholar] [CrossRef]
- Yachen, L.; Yufan, T.; Qi, Z.; Jiaquan, D. Prediction Model for the Chemical Futures Price Using Improved Genetic Algorithm Based Long Short-Term Memory. Processes 2023, 11, 238. [Google Scholar]
- Fangchen, H.; Yuhan, C.; Wenzhou, L. Multi-objective Optimal Scheduling of Small Integrated Energy System Based on Improved Particle Swarm Optimization Algorithm. J. Phys. Conf. Ser. 2022, 2400, 012051. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Monitoring Technology | Advantages | Disadvantages | Technical Parameters | |
|---|---|---|---|---|
| Semiconductor gas sensor | Low power consumption, simple application circuit and low cost | Poor gas selectivity and poor stability | The linear detection range is narrow. | |
| Solid electrolyte type gas sensor | Excellent selectivity. | Long response time, high power consumption and high cost | The sensitivity is higher than that of semiconductor gas sensor | |
| Catalytic combustion gas sensor | High sensitivity to hydrogen and methane | Low precision, high power consumption and ignition explosion risk. | Detection range: 0~100%LEL, Detection accuracy: ±3%LEL | |
| Infrared absorption gas sensor | Excellent selectivity | High cost and vulnerable to humidity effects | Detection radius: 7.5 m | |
| Laser methane sensor | Point-type laser methane sensor | High precision, short reaction time, selectivity, less affected by the environment. | Multi-point layout | Sensitivity: 5 ppm.m Response time: 0.5 s |
| Open-circuit laser methane sensor | Installation is subject to site restrictions | Sensitivity: ±5 ppm.m Response time: 1 s | ||
| Gimbal-mounted Laser Methane Remote Sensing Instrument | High cost | Detection radius: 150 m Response time: 0.1 s | ||
| Aperture Type | Aperture Size/mm | Feature |
|---|---|---|
| Pinhole leakage | [1, 10) | The leakage point is small, and the outflow speed is slow. |
| Medium hole leakage | [10, 50) | The leakage point is larger, and the outflow speed is faster than the small hole. |
| Large hole leakage | [50, 150) | The leak point is large, the flow rate is fast, and you can see where the fluid is going. |
| Crush | [150, ∞) | The leakage site is damaged or broken, and the outflow is large, which may have a greater impact on the equipment and the environment. |
| Monitoring Point | /m | /m | /m |
|---|---|---|---|
| 1 | 6.97 | 33.79 | 1.50 |
| 2 | 10.61 | 15.69 | 1.00 |
| 3 | 23.87 | 36.91 | 1.20 |
| 4 | 29.25 | 25.23 | 1.50 |
| 5 | 43.78 | 32.32 | 1.20 |
| 6 | 54.48 | 20.79 | 1.00 |
| Parameter Name | Parameter Value | ||
|---|---|---|---|
| Maximum number of iteration steps | G = 500 | ||
| Population size | N = 100 | ||
| Weather stability | AT = 2 | ||
| External wind speed | V = 3 m/s | ||
| Inertia factor | ω = 0.7 | ||
| Acceleration factor | c1 = 2 | c2 = 2 | |
| Initial crossover probability | = 0.1 | = 7.546 | = 3 |
| Initial mutation probability | = 0.01 | = 60 | = 3 |
| Adaptive selection probability | = 0.07 | = 7.055 | = 3 |
| Argument | True Value | Artificial Value | |||
|---|---|---|---|---|---|
| x/m | 37.38 | 42.51 | 2.115 | 2.525 | 0.915 |
| y/m | 35.12 | 38.46 | |||
| z/m | 1.50 | 1.64 | |||
| Q/g·s−1 | 800 | 685 | 105 | 156 | 0.886 |
| Q/g·s−1 | x/m | y/m | z/m | MAE | RMSE | ||
|---|---|---|---|---|---|---|---|
| Real | 800 | 37.38 | 35.12 | 1.50 | 0 | 0 | 1 |
| PSO | 853 | 36.12 | 33.54 | 1.45 | 2.852 | 3.045 | 0.712 |
| GA | 785 | 38.92 | 38.55 | 1.87 | 3.895 | 4.211 | 0.654 |
| IGA | 685 | 42.51 | 38.46 | 1.64 | 2.115 | 2.525 | 0.915 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, G.; Hu, H. Research on Multi-Point Monitoring Data Grid Model and Inversion Positioning Method for Gas Leakage in Oil and Gas Stations. Sustainability 2024, 16, 1638. https://doi.org/10.3390/su16041638
Meng G, Hu H. Research on Multi-Point Monitoring Data Grid Model and Inversion Positioning Method for Gas Leakage in Oil and Gas Stations. Sustainability. 2024; 16(4):1638. https://doi.org/10.3390/su16041638
Chicago/Turabian StyleMeng, Ge, and Hao Hu. 2024. "Research on Multi-Point Monitoring Data Grid Model and Inversion Positioning Method for Gas Leakage in Oil and Gas Stations" Sustainability 16, no. 4: 1638. https://doi.org/10.3390/su16041638
APA StyleMeng, G., & Hu, H. (2024). Research on Multi-Point Monitoring Data Grid Model and Inversion Positioning Method for Gas Leakage in Oil and Gas Stations. Sustainability, 16(4), 1638. https://doi.org/10.3390/su16041638